Mecanum Wheel Robot Car Full Package (with 18650 batteries)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Mecanum Wheel Robot Car Kit Metal Chassis
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Encoder normally is used for PID algorithm. Right now our Mecanum car does not need PID function, so we don’t write encoder program for this car.
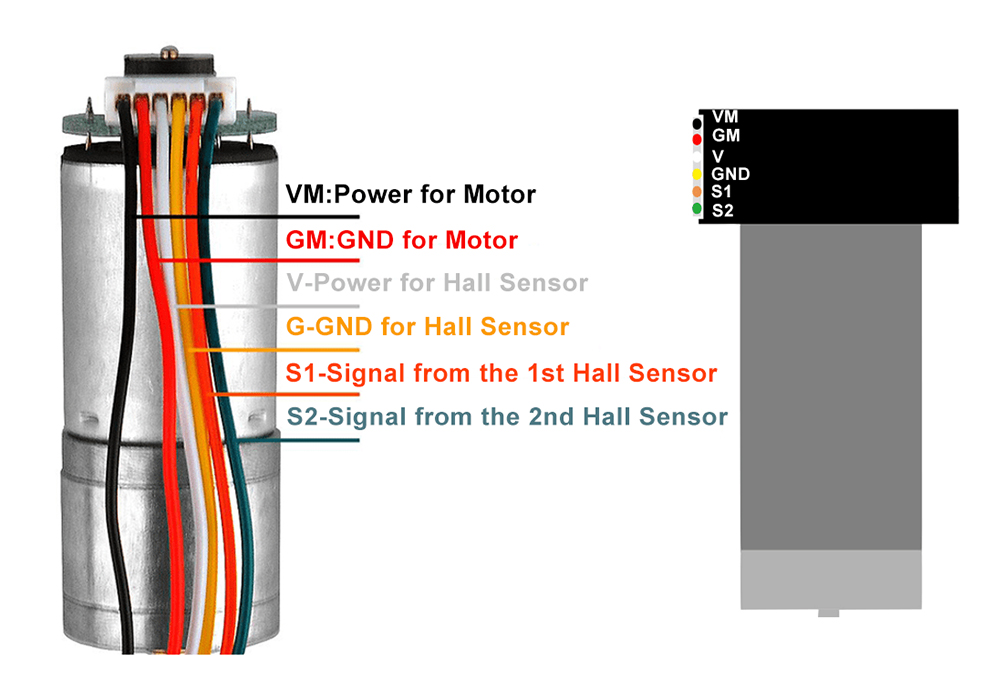
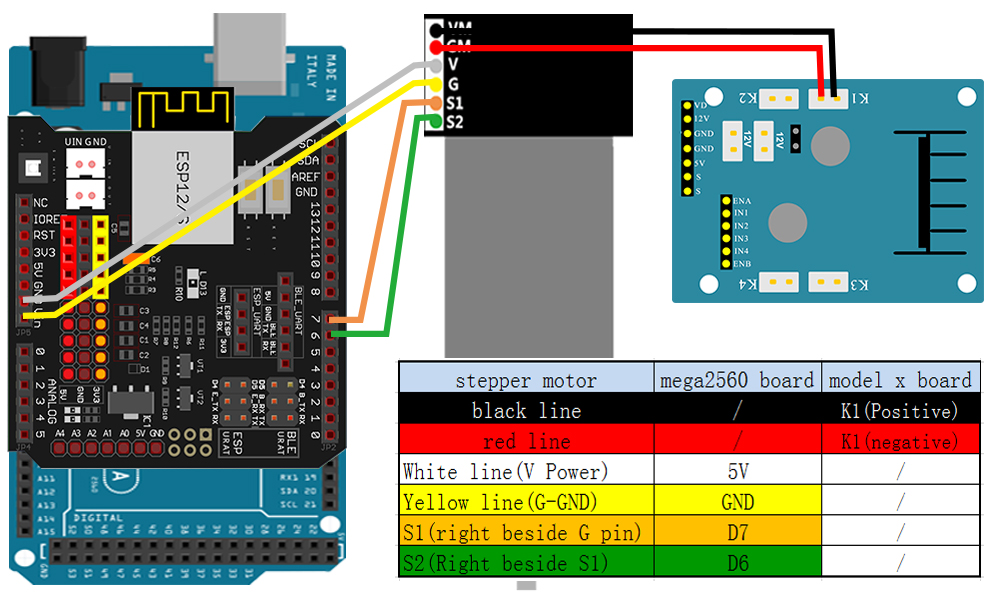
Many users have purchased OSOYOO DC gear motor for Tank robot ,Mecanum wheel robot and Balance car which has build-in encoder. Some of them are interested on how to program encoder. We provide a simple program which guide user to use OSOYOO Basic Board for Arduino to read how many pulses encoders send to Arduino on each rotation.
Now the latest version of the motors come without protection caps as the attach picture. The motor protection cap peels off easily,so we remove this cap.
Once you load the code into Arduino IDE, open the serial monitor in the upper-right corner.
Now install a wheel onto the DC gear motor and make it can be rotated by hand. Then rotate the wheel for 360 degree and stop. You will see the serial monitor screen will show:
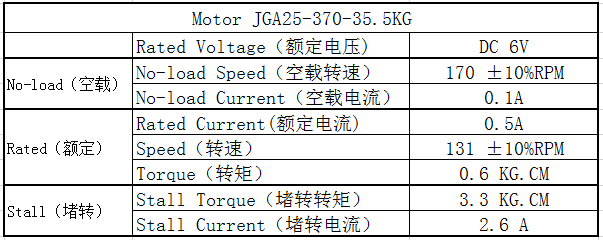
The last line shows Position 151 . This means when you rotate the motor to 360 degree, the hall sensor has generated 151 pulses. so my motor has about 150 pulses per rotation.
I am able to upload this Encoder code into my MEGA Arduino. I connect the encoder wires as depicted. I cannot display anything on the serial monitor. I have verified the board and comm port in the TOOLS menu. I have set it up just like the video. I have tried all the motors. I have verified my hook up wires are good with a volt/ohm meter.
I was able to get two encoder readings but the two other one do not display anything. It seems that two of my encoders are not working properly. Any help??












I am able to upload this Encoder code into my MEGA Arduino. I connect the encoder wires as depicted. I cannot display anything on the serial monitor. I have verified the board and comm port in the TOOLS menu. I have set it up just like the video. I have tried all the motors. I have verified my hook up wires are good with a volt/ohm meter.
Could the problem be the Encoder.Zip?
Thank you
Jack
you need use install a wheel on the motor, use your hand to rotate the wheel. If your motor does not rotate, you can not see any Serial printing.
I was able to get two encoder readings but the two other one do not display anything. It seems that two of my encoders are not working properly. Any help??
you can send your order number and address to [email protected], we can send you replacement encoder if your order is placed within one year.