In dieser Lektion, wir werden 2 Stück IR-Abstandssensoren am Roboterauto anbringen und das Auto so programmieren, dass es den Bewegungen von Objekten folgt. Das Prinzip dieses Experiments basiert auf dem Prinzip der IR-Abstandserkennung. Das Auto empfängt das Signal von den IR-Distanzsensoren, und dann steuert das Programm das Auto, um Aktionen auszuführen.
Sie müssen Lektion 1 (Zusammenbau des Autos) abschließen, bevor Sie mit dieser Lektion fortfahren.
Teile und Geräte
Nein.
Bild
Gerät
Quatität
Zubehör
Link
1
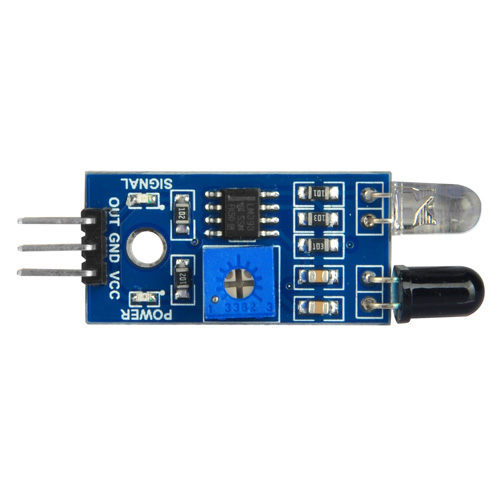
Modul Hindernisvermeidung
2
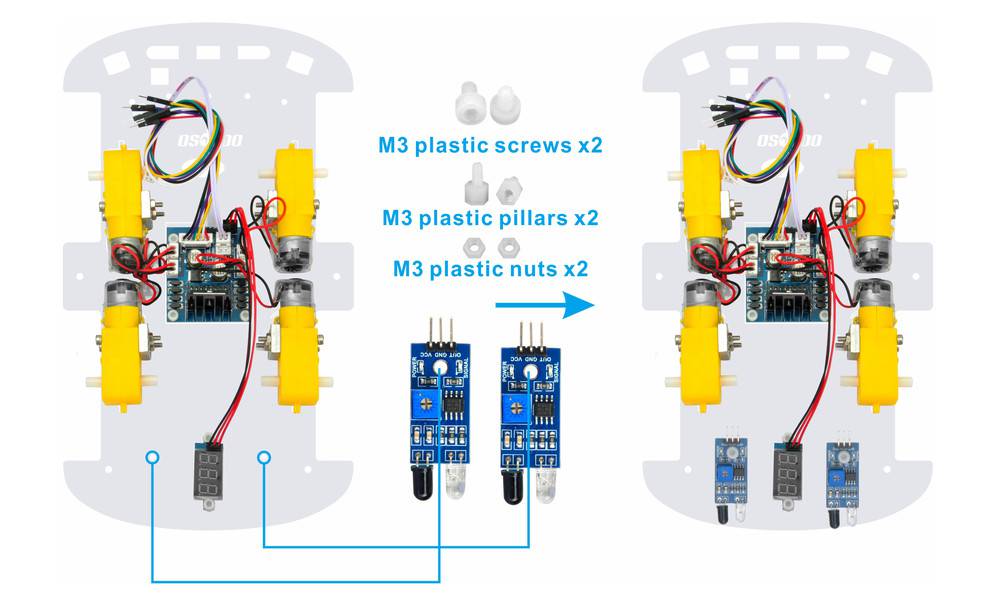
M3 Kunststoffschraube x 2
M3 Kunststoffmutter x 2
M3 Kunststoffsäulen x 2
Schritt 1: Installieren Sie das Smart Car-Grundgerüst wie in Smart Car Lektion 1 beschrieben. Wenn Sie die Installation in Lektion 1 bereits abgeschlossen haben, belassen Sie sie so, wie sie ist.
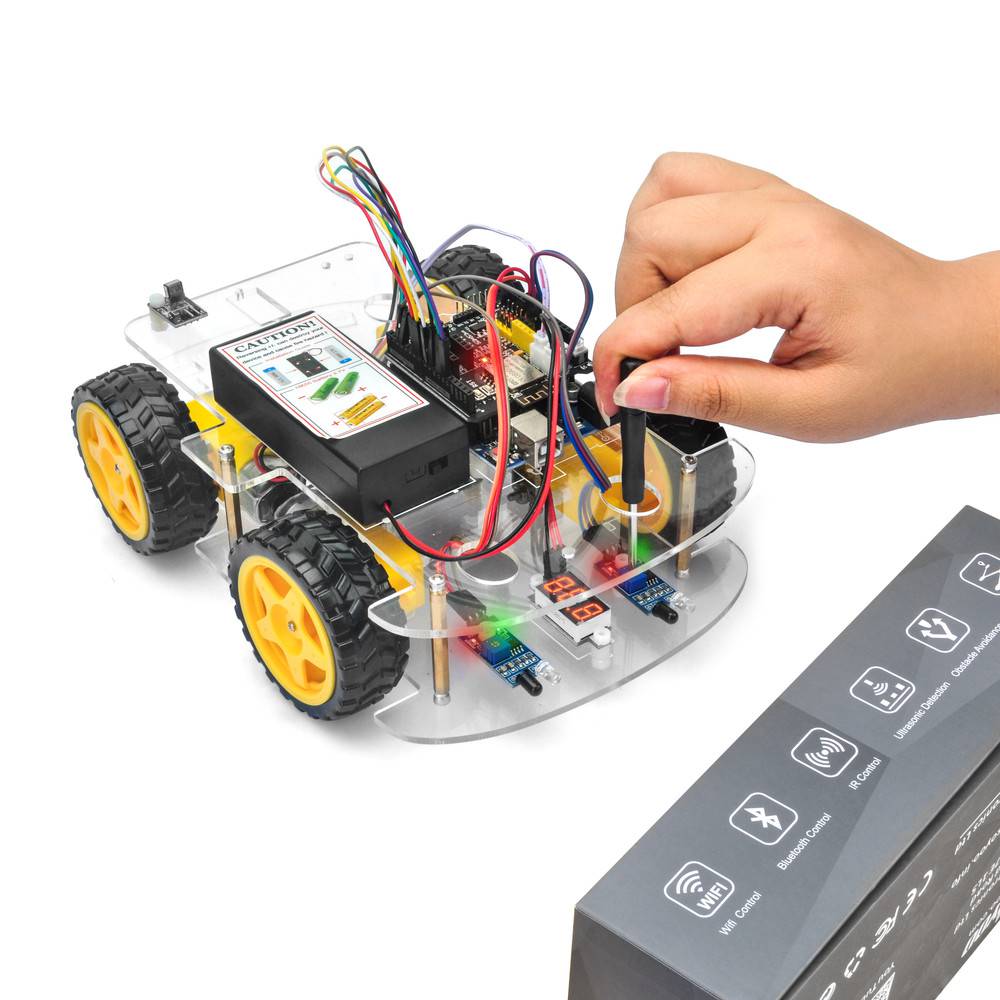
Schritt 2: Entfernen Sie die Schrauben an den Kupfersäulen und fügen Sie 2 Stück IR-Distanzsensoren auf das Auto. Installieren Sie die IR-Distanzsensoren mit 2 Stück M3-Kunststoffschrauben, M3-Kunststoffsäulen und M3-Kunststoffmuttern an der Rückseite des niedrigen Auto-Chassis.
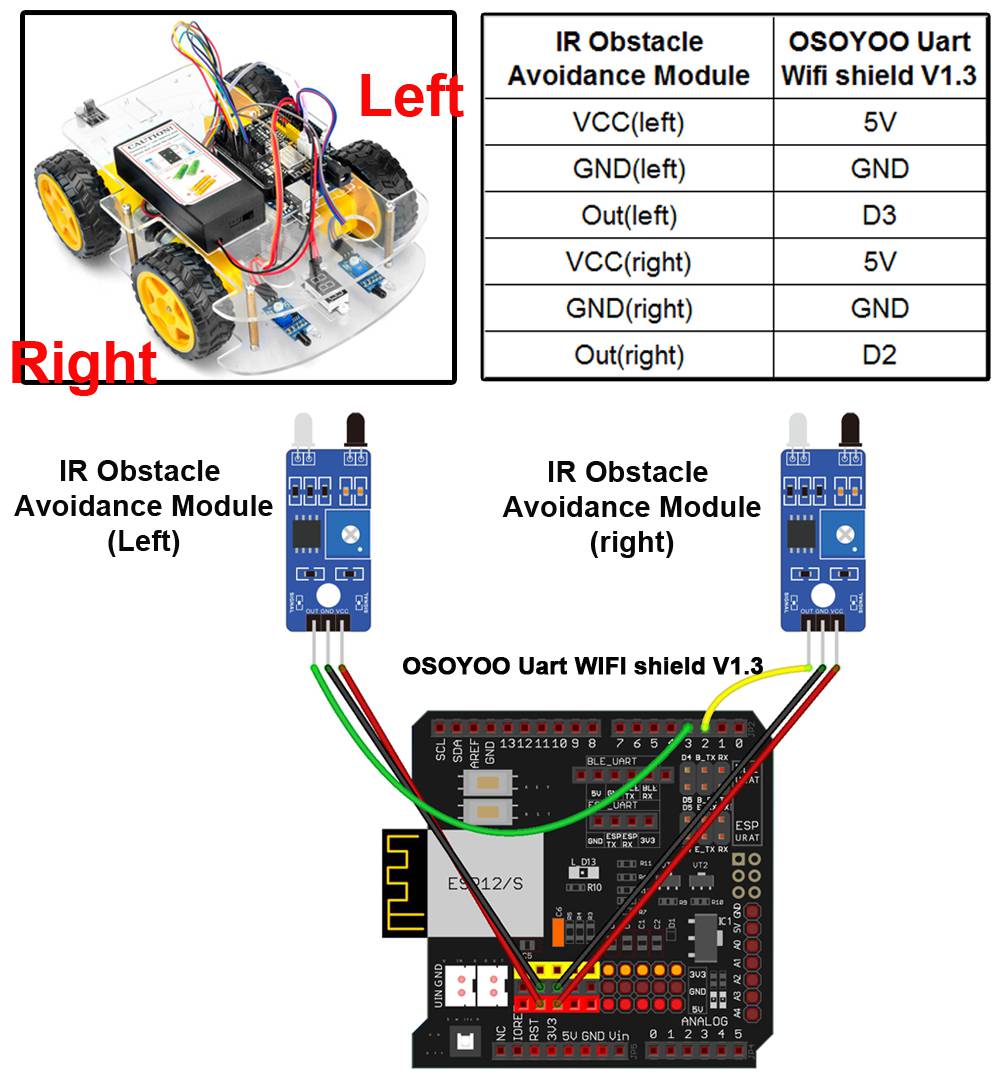
Schritt 3: Schließen Sie 2 Stück IR-Distanzsensormodule gemäß dem folgenden Anschlussplan an (Zur Erinnerung: Entfernen Sie NICHT die in Lektion 1 installierten Drähte) :
Schritt 4: Befestigen Sie die Schrauben an den Kupfersäulen, um das obere Chassis mit dem unteren Chassis zu verbinden.
Schritt 1: Installieren Sie die neueste IDE (Wenn Sie eine IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt)
IDE herunterladen von https://www.arduino.cc/en/Main/Software?setlang=en, installieren Sie dann die Software.
Schritt 2: Beispielcode für Lektion 3 herunterladen unter https://osoyoo.com/driver/v2smartcar-lesson3.zip , Entpacken Sie die heruntergeladene Zip-Datei v2smartcar-lesson3.zip, Sie werden einen Ordner namens v2smartcar-lesson3 sehen .
Schritt 3: Schließen Sie Ihr Board mit einem USB-Kabel an den PC an, öffnen Sie die IDE -> klicken Sie auf “file” -> klicken Sie auf “Open” -> wählen Sie den Code “smartcar-lesson3.ino” im Ordner “smartcar-lesson3”, laden Sie den Code in Ihr Board.
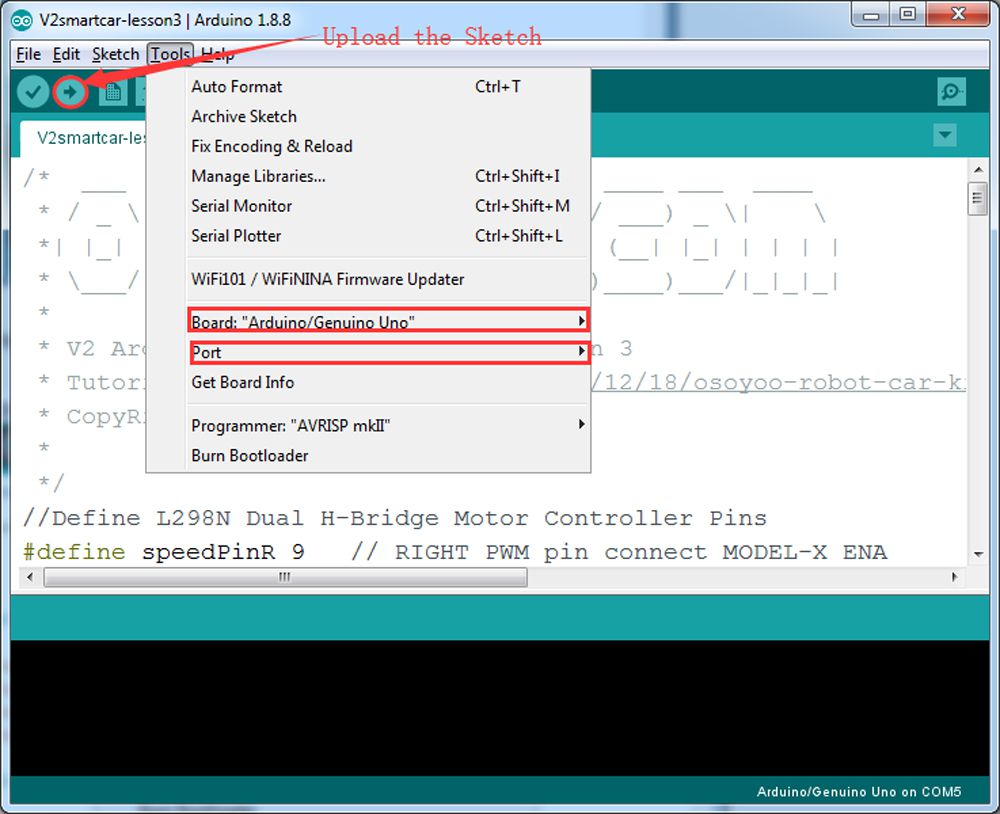
Schritt 4: Wählen Sie das entsprechende Board und den entsprechenden Port für Ihr Projekt aus und laden Sie die Skizze auf das Board.
Schritt 5: Schalten Sie das Fahrzeug ein, halten Sie ein Objekt etwa 10 cm vor jeden IR-Abstandssensor und stellen Sie das Potentiometer an den IR-Abstandssensoren so ein, dass das Objekt oder Ihre Hand erkannt wird.
Hinweis: Wenn dieses Modul Objekte erkennt, leuchten die Betriebsanzeige und die Signalanzeige. Wenn Sie das Objekt über den Erfassungsbereich hinaus bewegen, leuchtet die Betriebsanzeige. Wenn die Signalanzeige immer leuchtet, obwohl sich das Objekt über dem Erfassungsbereich befindet, müssen Sie auch das Potentiometer einstellen
Prüfung:
Schalten Sie das Auto ein, bewegen Sie ein Objekt oder Ihre Hand vor dem Auto, und dann bewegt sich das Auto entsprechend: Es sieht aus, als ob Sie es ziehen. Es fährt vorwärts, wenn beide IR-Hindernisvermeidungsmodule ein Objekt oder Ihre Hand erkennen; es dreht nach rechts, wenn die rechten IR-Hindernisvermeidungsmodule ein Objekt erkennen; es dreht nach links, wenn die linken IR-Abstandssensoren ein Objekt erkennen.
Wenn sich ein Objekt oder Ihre Hand mehr als 10 cm vor Ihnen befindet, hält er an.
Anmerkung:
1) Da die IR-Distanzsensormodule auf der Rückseite des Fahrzeugs installiert sind, sind alle Bewegungsrichtungen entgegengesetzt zu anderen Kursen.
2) Das Fahrzeug kann nur vorwärts fahren, nach rechts und links abbiegen, aber nicht rückwärts fahren.
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help



















Hello, the object sensors are very weak. I have to put a paper about 2 cm to the car to detect it. Any suggestions ?
you can adjust the sensitivity potentiometer with a screwdriver. see this https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson3/3.jpg
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
Can someone please help me order replacements?
Oh, good grief. Never mind. I completely failed to notice the “click here to buy” link next to the parts list above.
OK, If you get any issue, please contact me again. Thanks.
Hi,
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
Kelvin.
Does the saftware notice successfully?
Pleas confirm you download the lesson 2 IR remote car or this commented lesson(lesson3).
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
Thank you. Your interest and support make us progress
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
Please provide your order No. and address, I’ll send the IR to you ASAP.
I have had this same problem have you managed to sort it out or is a new part needed?
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help
Is one of the sensers suppose to have gunk on it?
Why do you ask such question? Our sensors should be brand new and clean in the package.