Herzlich willkommen zur ersten Lektion von OSOYOO Sport Car für Arduino!
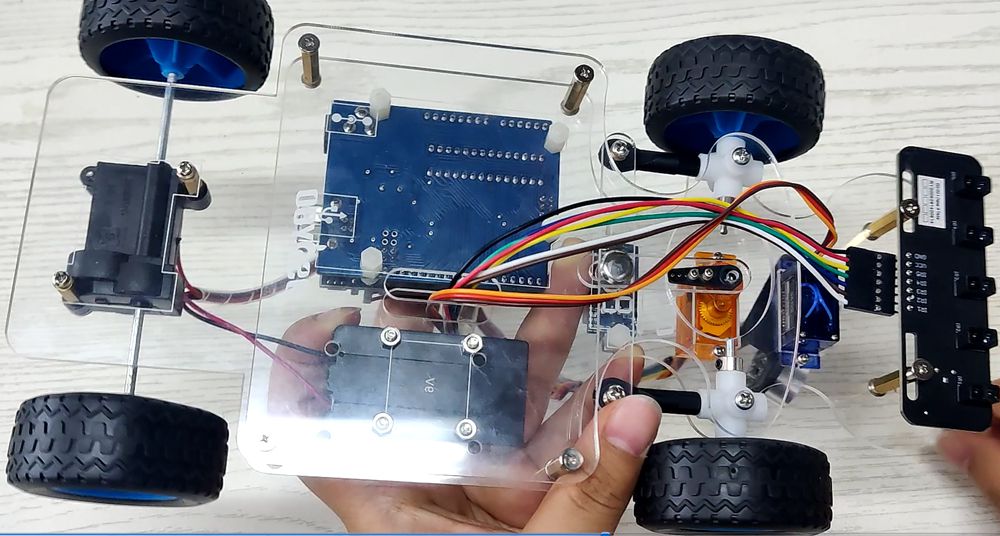
In dieser Lektion bauen wir das Roboterauto zusammen und richten den Lenk-Servo aus.
Weil Deine Experimente in den künftigen Lektionen alle auf dem in Lektion 1 erfolgten Zusammenbau basieren ist es sehr wichtig, den Aufbau und das Beispielprogramm in dieser Lektion sorgfältig zu testen.
Bitte sieh Dir neben dem Tutorial-Text auf jeden Fall auch das Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
Teile und Baugruppen
Nr.
Baugruppe
Abbildung
Anzahl
Link
1
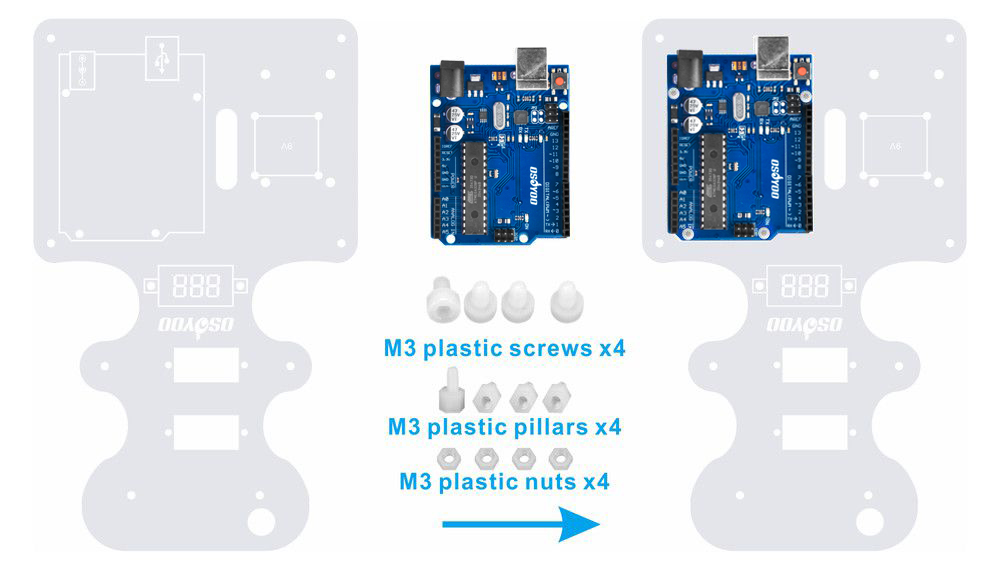
OSOYOO Basic Board for Arduino (voll kompatibel mit Arduino UNO R3)
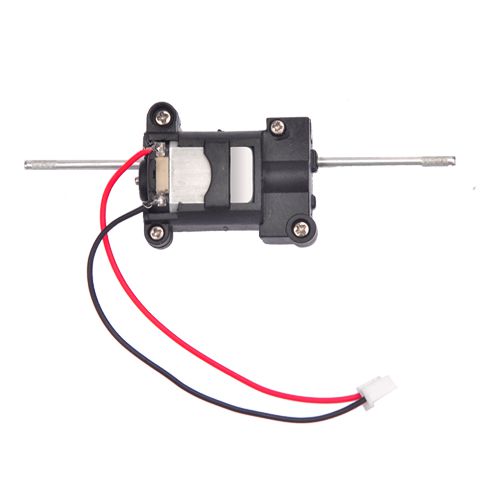
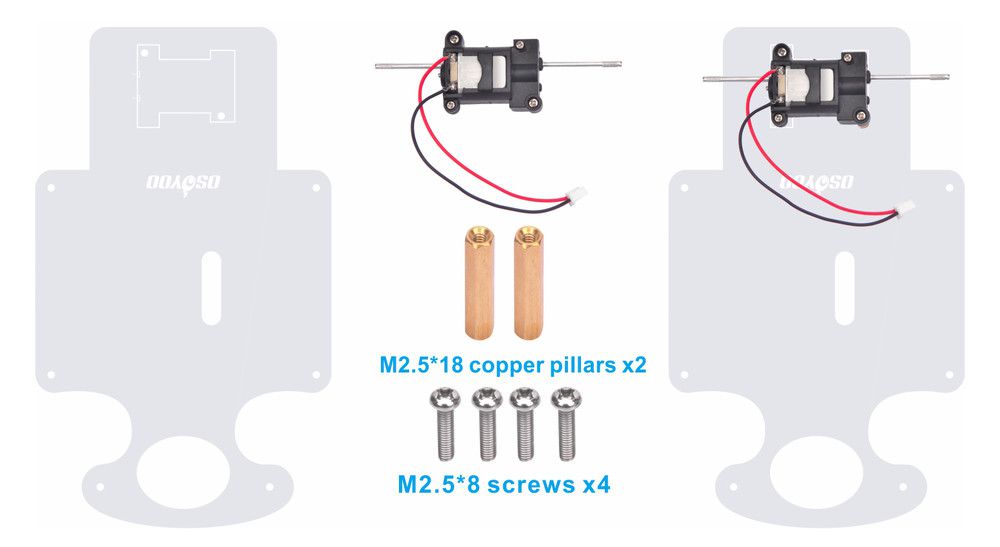
2. Befestige den Motor auf dem unteren Chassis (wie im Video gezeigt) mit 2 Messing-Bolzen M2.5*18 und 4 Schrauben M2.5*8
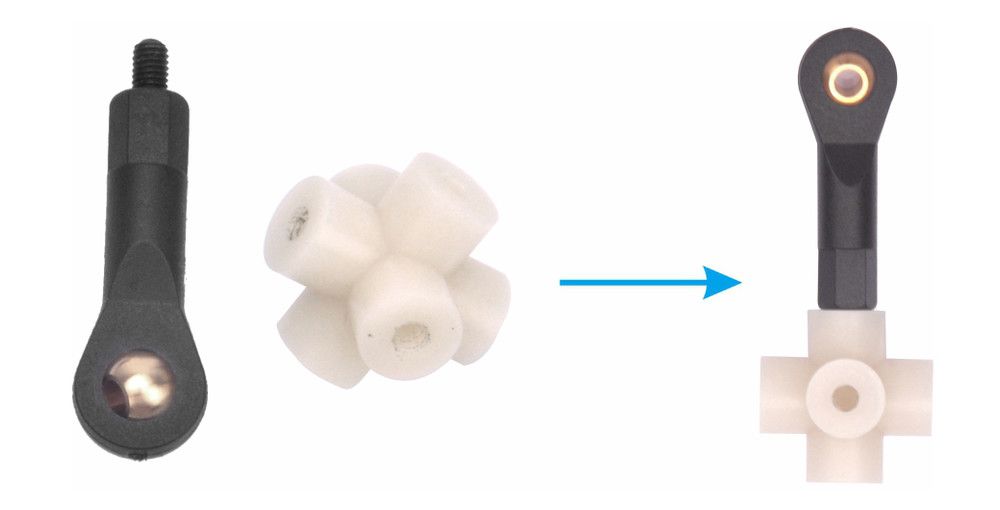
3. Schraube den Spurhebel in die Radaufhängung (Achtung: die durchgehende Bohrung wird zur Radbefestigung benutzt, dort bitte keine anderen Teile anschrauben !)
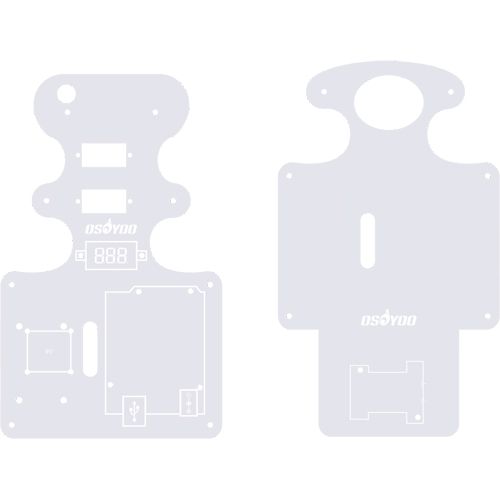
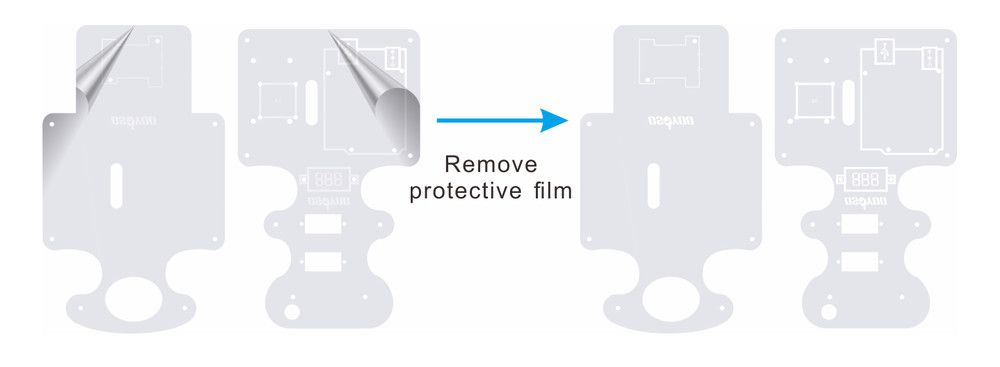
4. Verbinde die 2 Kugelgelenke der Spurhebel mit der langen Acryl-Spurstange; entferne auch hier vorab den Schutzfilm vom Acryl.
5. Befestige das schwarze Servo-Horn (aus dem Päckchen mit dem orangen Servo Motor) auf dem Acryl-Lenkhebel
6. Verbinde den Lenkhebel mittels der M5*6 Hülsenschraube mit der Spurstange
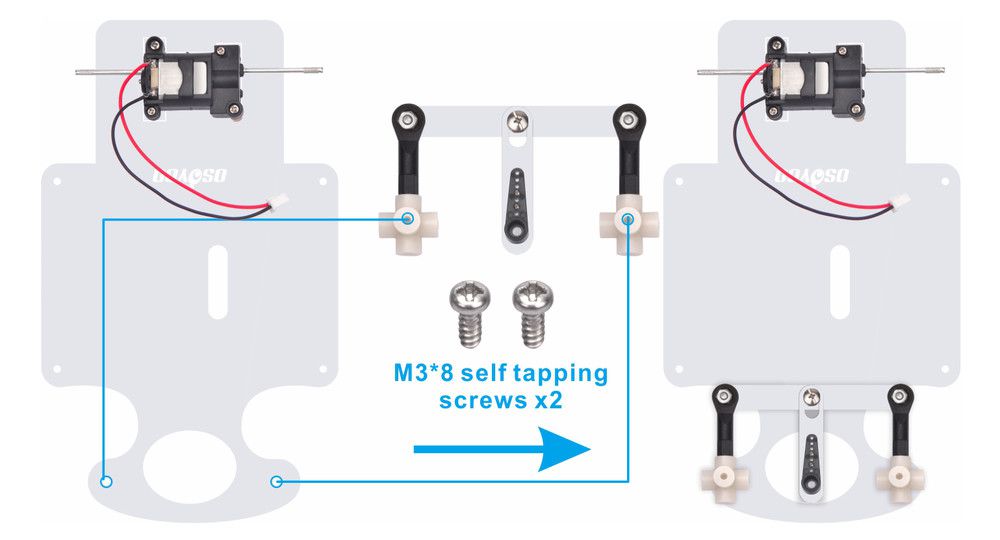
7. Befestige die 2 Radlager auf dem unteren Chassis mit 2 selbstschneidenden Schrauben M3*8. (Achtung: Die Radlager müssen nach Befestigung am unteren Chassis noch um die jeweilige Schraubenachse drehbar bleiben)
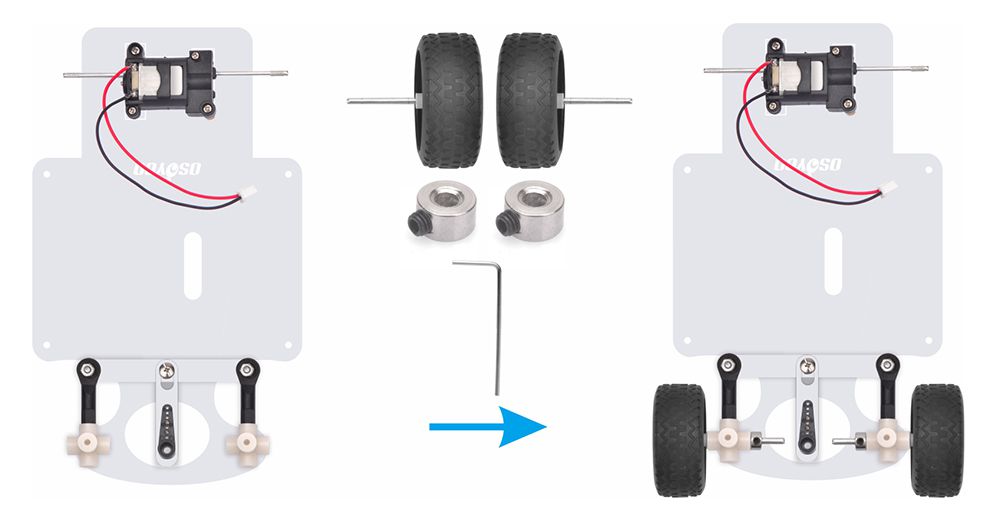
8. Drücke die 2 Räder auf die Radachsen (siehe Video – Achse senkrecht auf fester Unterlage halten, dann Rad von oben aufdrücken)
9. Stecke das freie Ende der Radachsen durch die Radaufhängungen und befestige dann die Klemmstopper mit den Madenschrauben auf den Achsenden
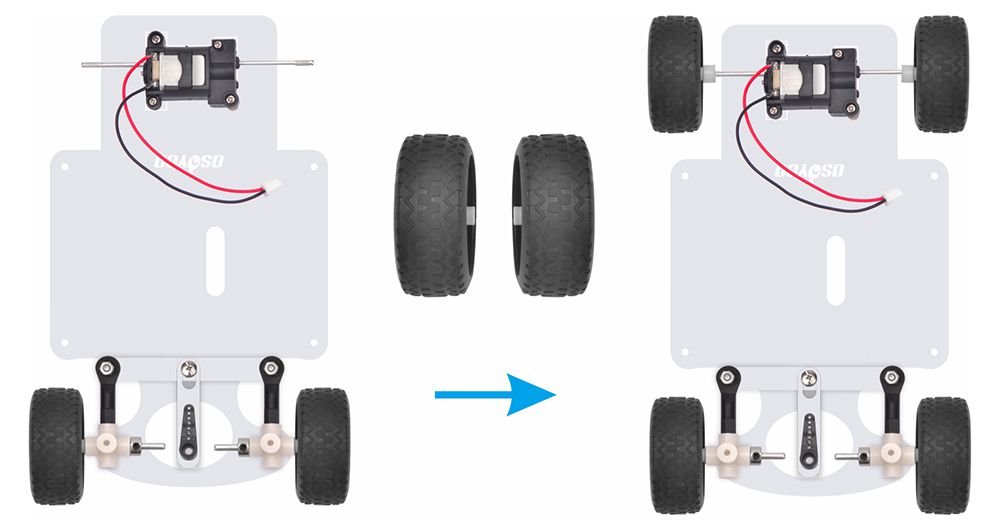
10. Drücke die anderen beiden Räder (mit beiden Händen von links und rechts gleichzeitig) auf den Motor
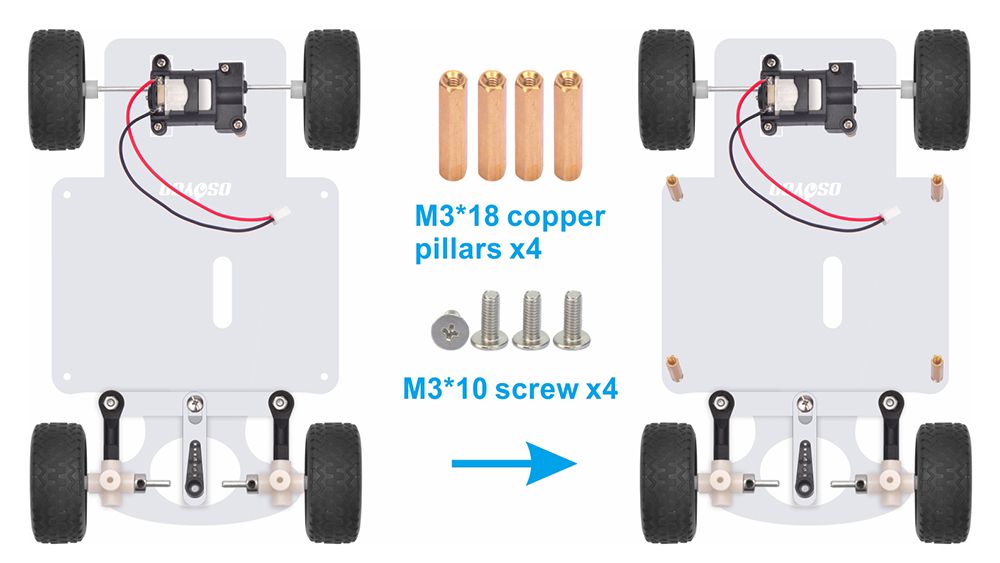
11. Schraube 4 Messingbolzen M3*18 mittels M3*10 Schrauben auf das untere Chassis
12. Befestige das OSOYOO UNO Board auf dem oberen Chassis mit M3 Kunststoff-Schrauben, -Bolzen und -Muttern
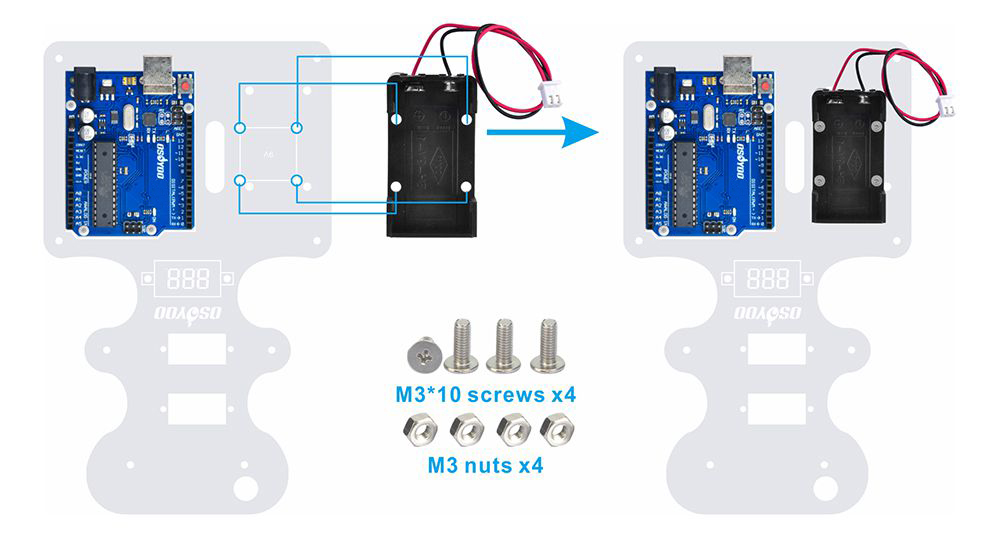
13. Schraube die 9V Batterie-Box mit M3 Schrauben und Muttern auf das Chassis (Achtung: wie im Video und ab Punkt 23 gezeigt mit den Anschlüssen nach hinten)
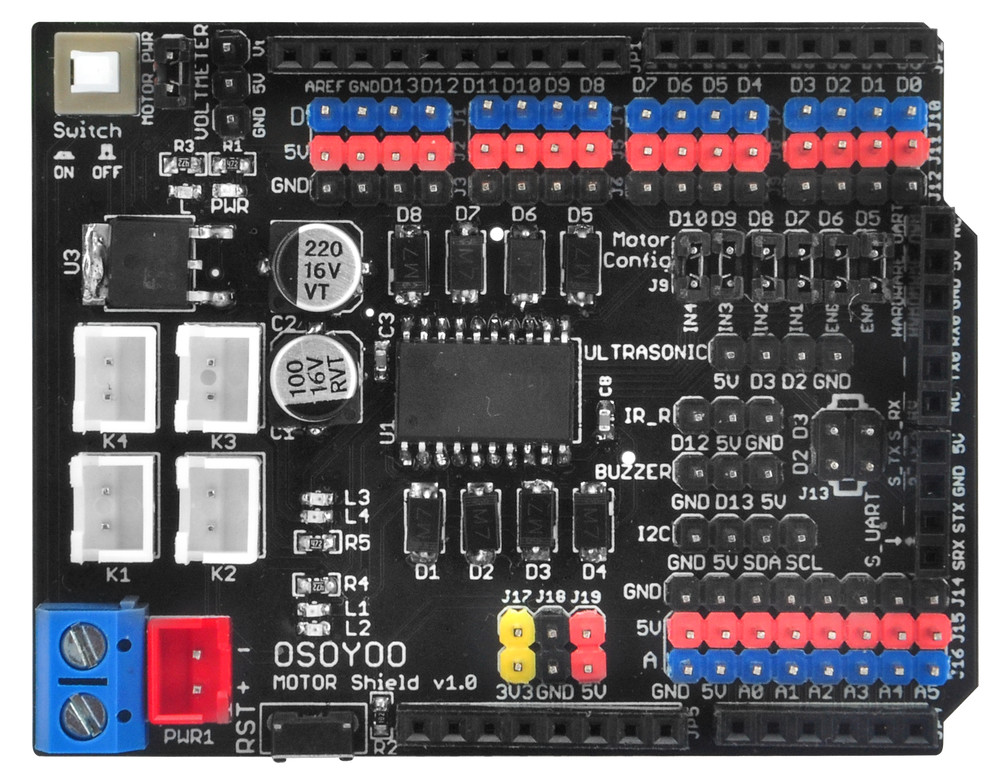
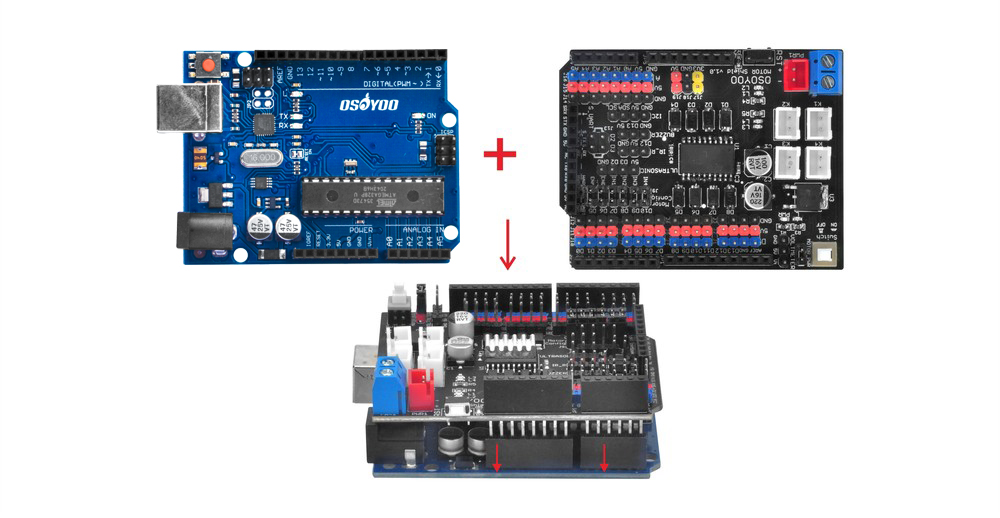
14. Stecke das OSOYOO Motor Shield wie auf dem Bild gezeigt in das OSOYOO UNO Board
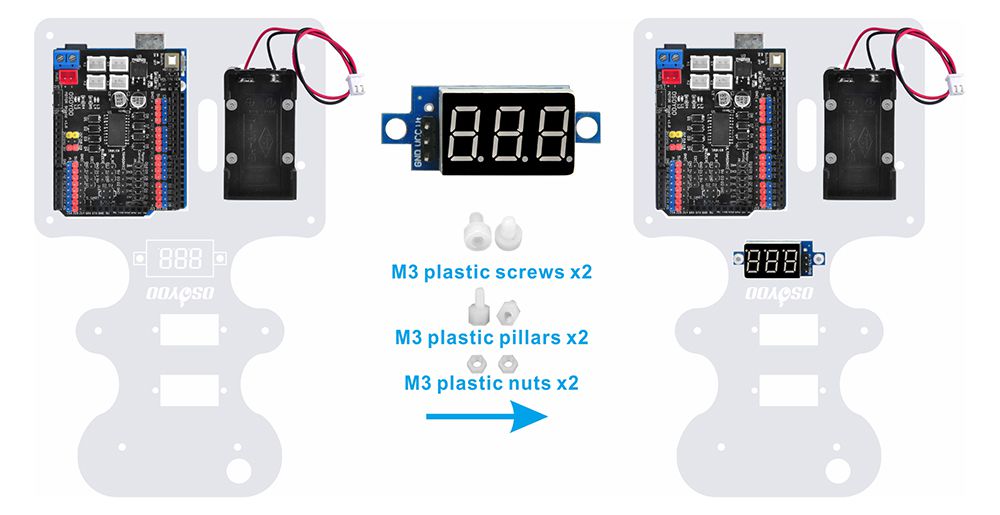
15. Befestige das Voltmeter mit M3 Kunststoff-Schrauben, -Bolzen und -Muttern auf dem Chassis (Achtung: wie auf Acryl-Chassis gezeigt mit den Dezimalpunkten nach hinten)
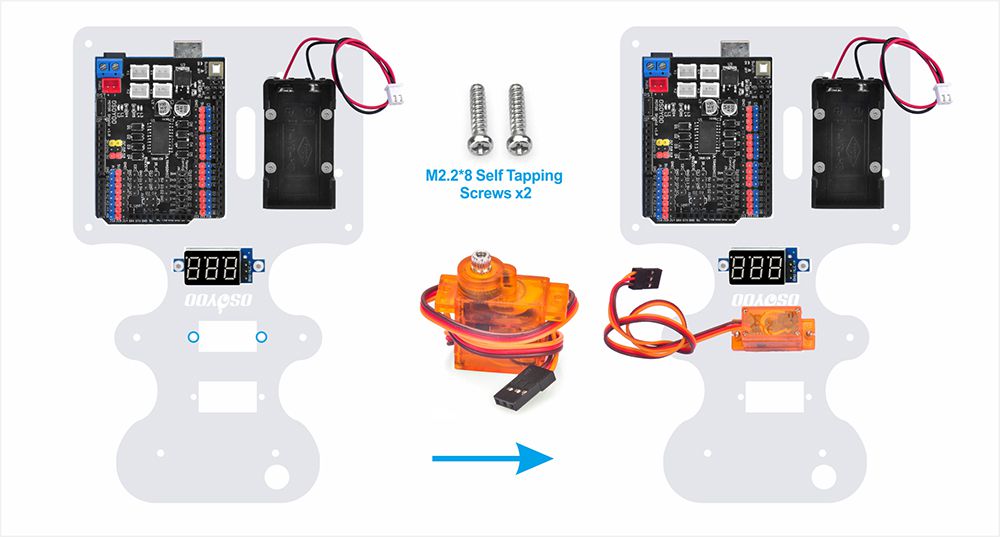
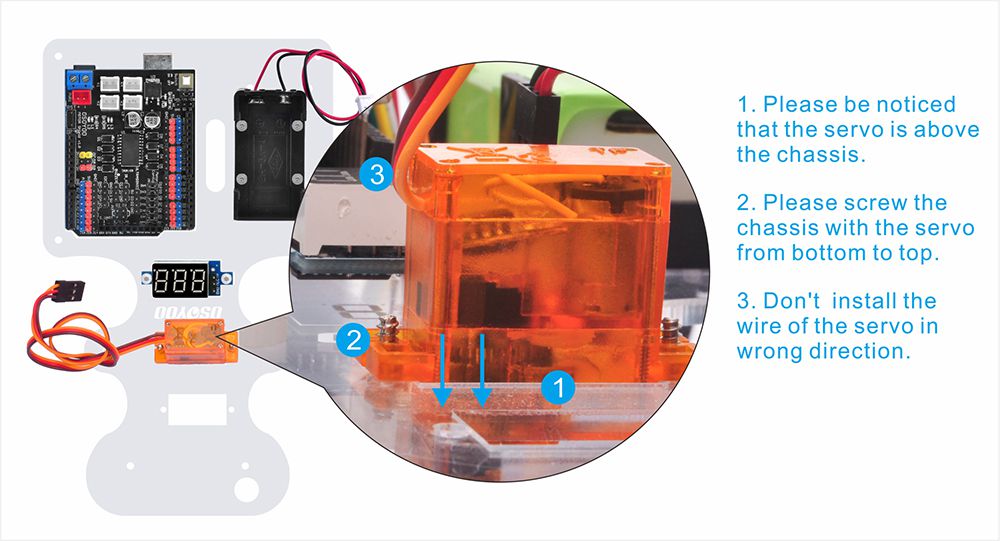
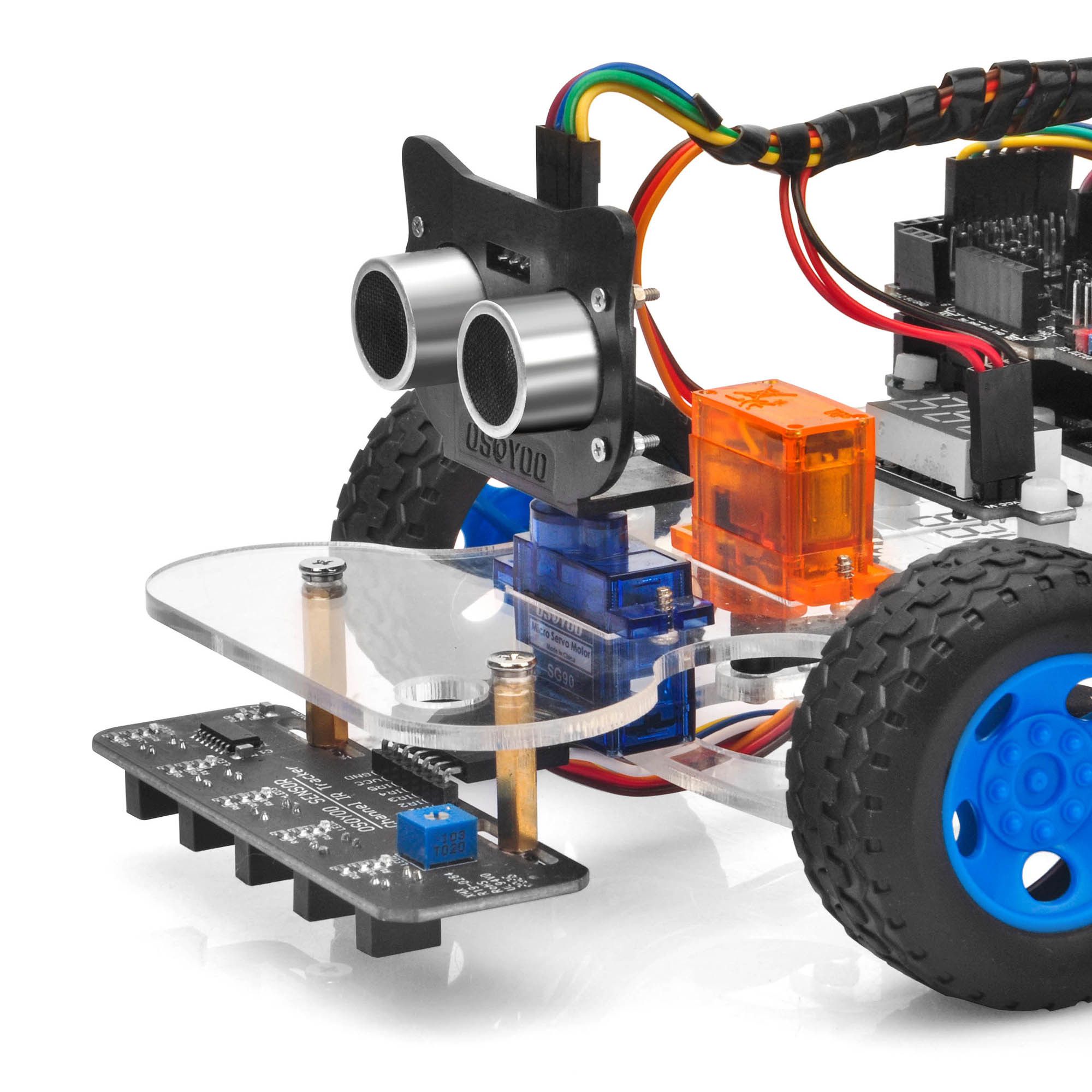
16. Befestige den MG90S Servo Motor (orange) mit 2 selbstschneidenden M2.2*8 Schrauben auf dem oberen Chassis
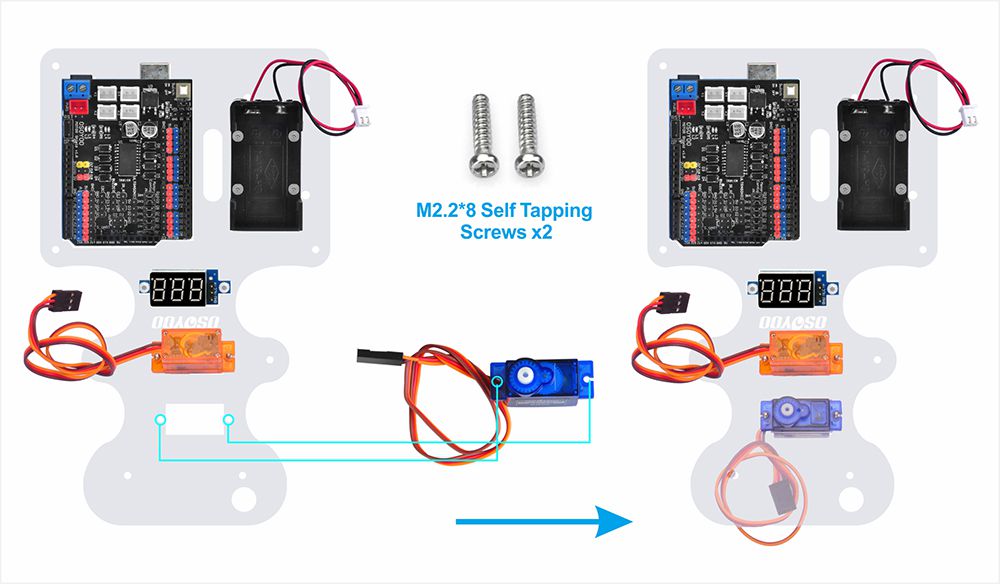
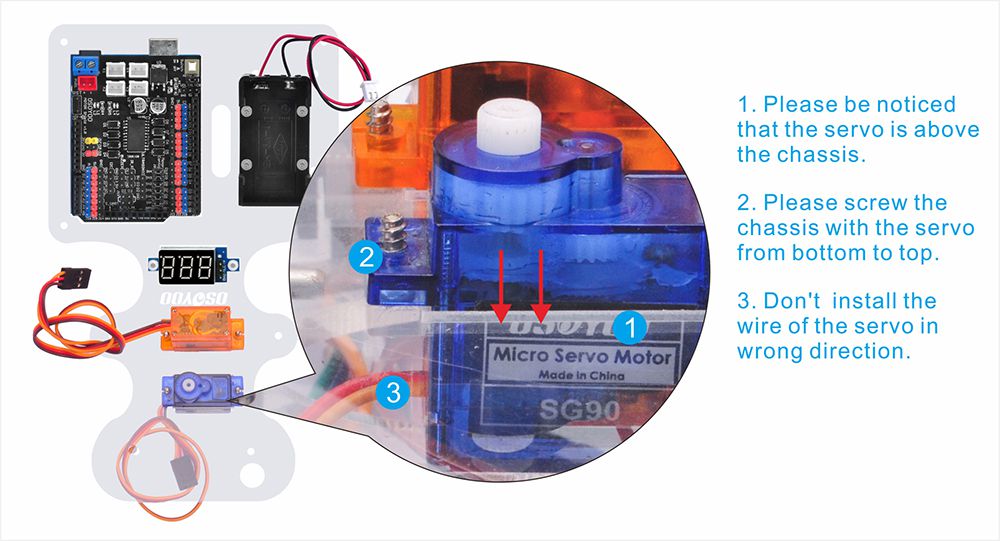
17. Befestige den anderen Servo Motor (blau) mit 2 selbstschneidenden Schrauben M2.2*8 auf dem oberen Chassis
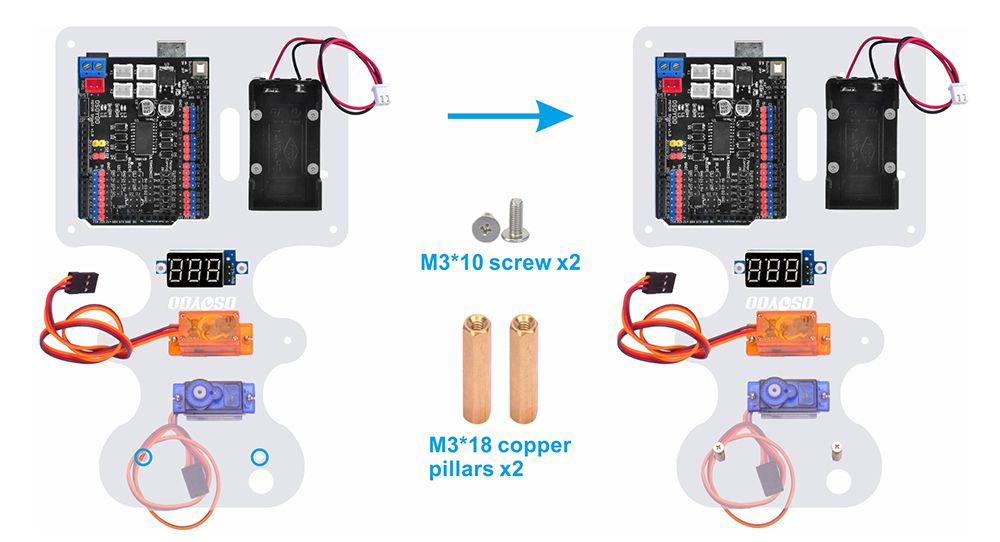
18. Schraube 2 Messingbolzen M3*18 mit 2 Schrauben M3*10 unter das obere Chassis
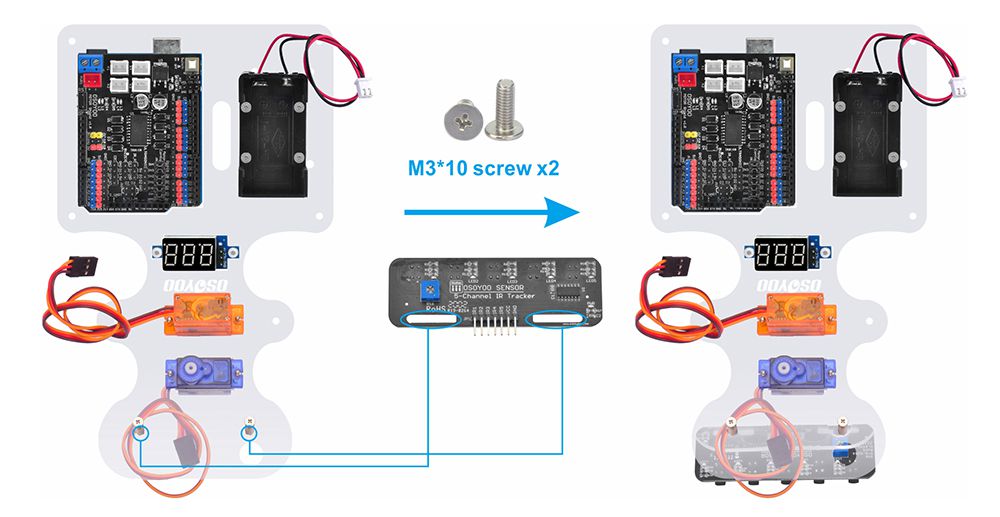
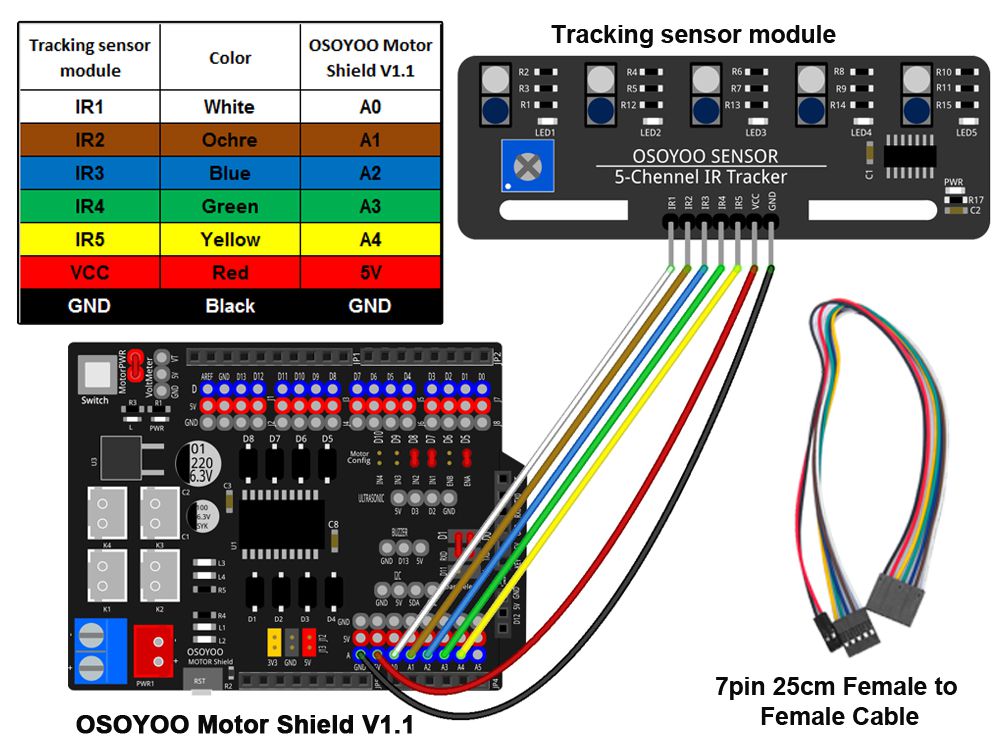
19. Schraube den Spurfolge Sensor mit 2 Schrauben M3*10 unter die M3*18 Messingbolzen
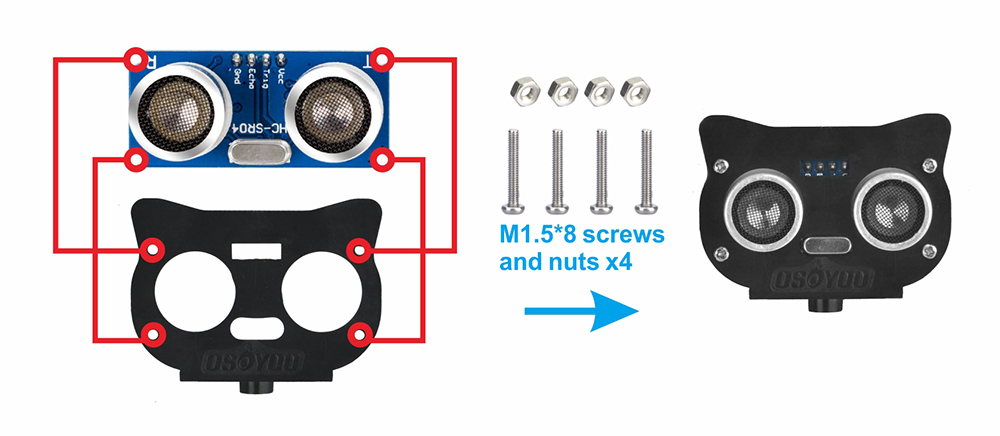
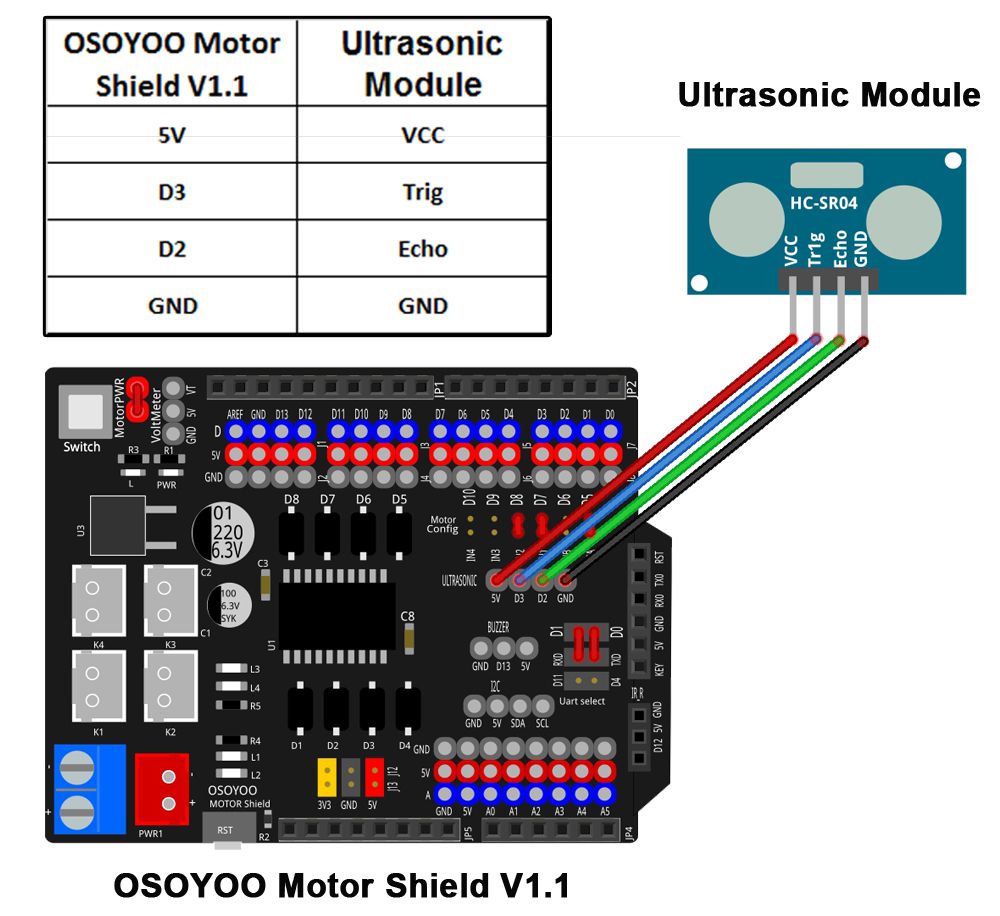
20. Schraube den Ultraschall Sensor mit 4 Schrauben M1.5*8 und 4 Muttern M1.5 in den Sensorhalter
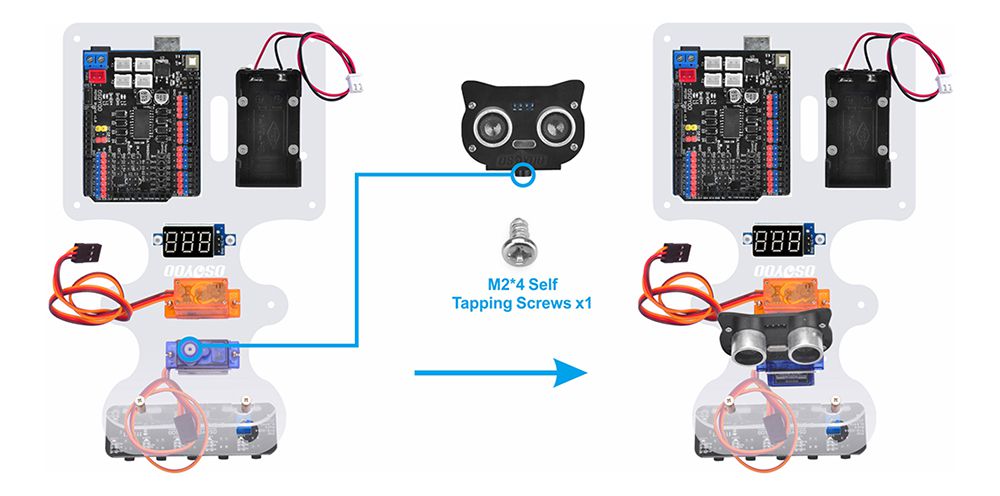
21. Stecke das Ultraschall-Modul wie im Bild gezeigt auf den Servo-Motor und fixiere es mit einer M2*4 selbstschneidenden Schraube
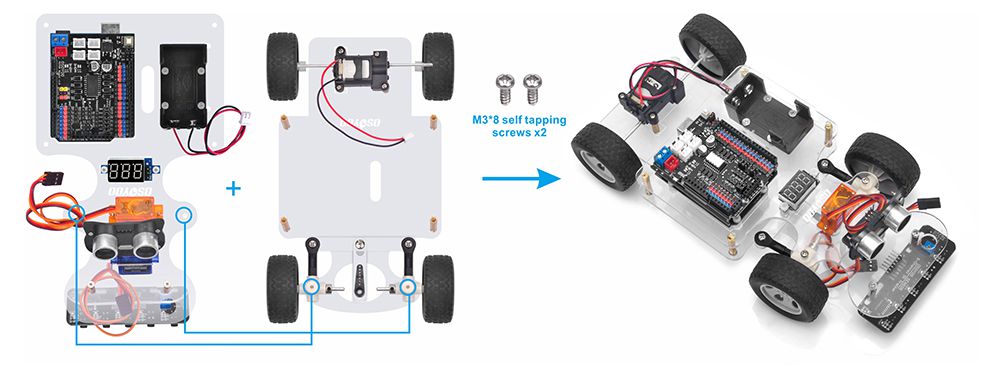
22. Befestige die Radaufhängungen mit 2 selbstschneidenden Schrauben M3*8 unter dem oberen Chassis. (Achtung: Die Radlager müssen auch nach Befestigung am oberen Chassis noch um die jeweilige Schraubenachse drehbar bleiben)
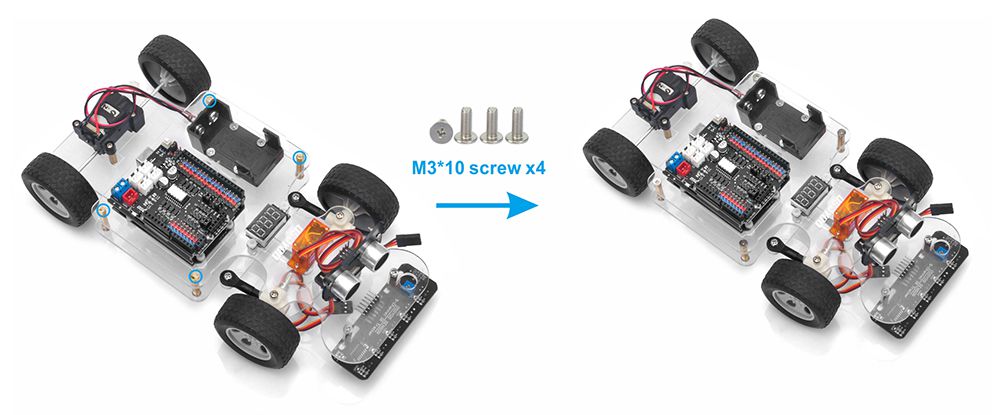
23. Verbinde mittels 4 Schrauben M3*10 das obere mit dem unteren Fahrzeug-Chassis
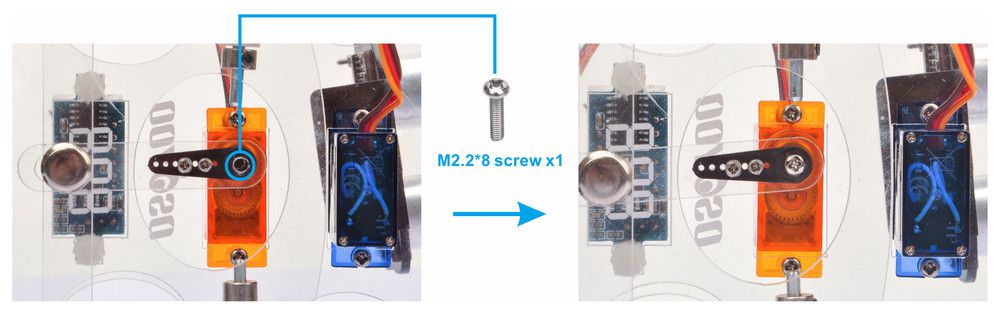
24. Stecke das auf dem Acryl-Lenkhebel befestigte schwarze Servo-Horn in den MG90S Servo Motor (orange) und fixiere es mit einer selbstschneidenden Schraube M2.2*8
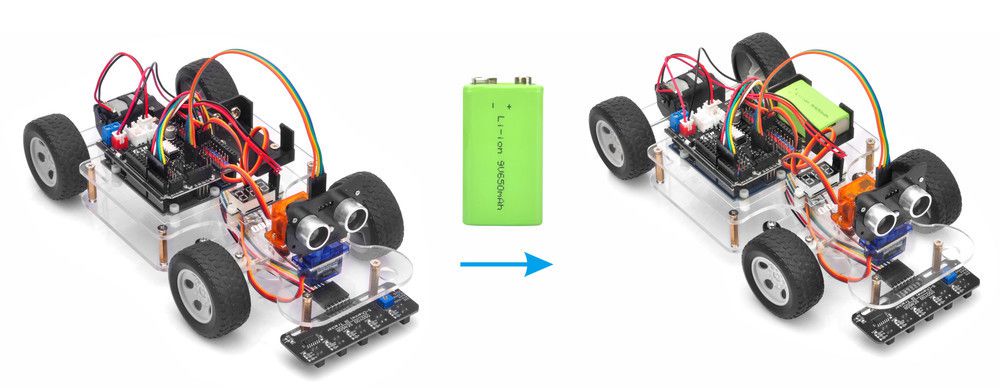
24. Installiere die 9V Batterie
Elektrische Anschlüsse
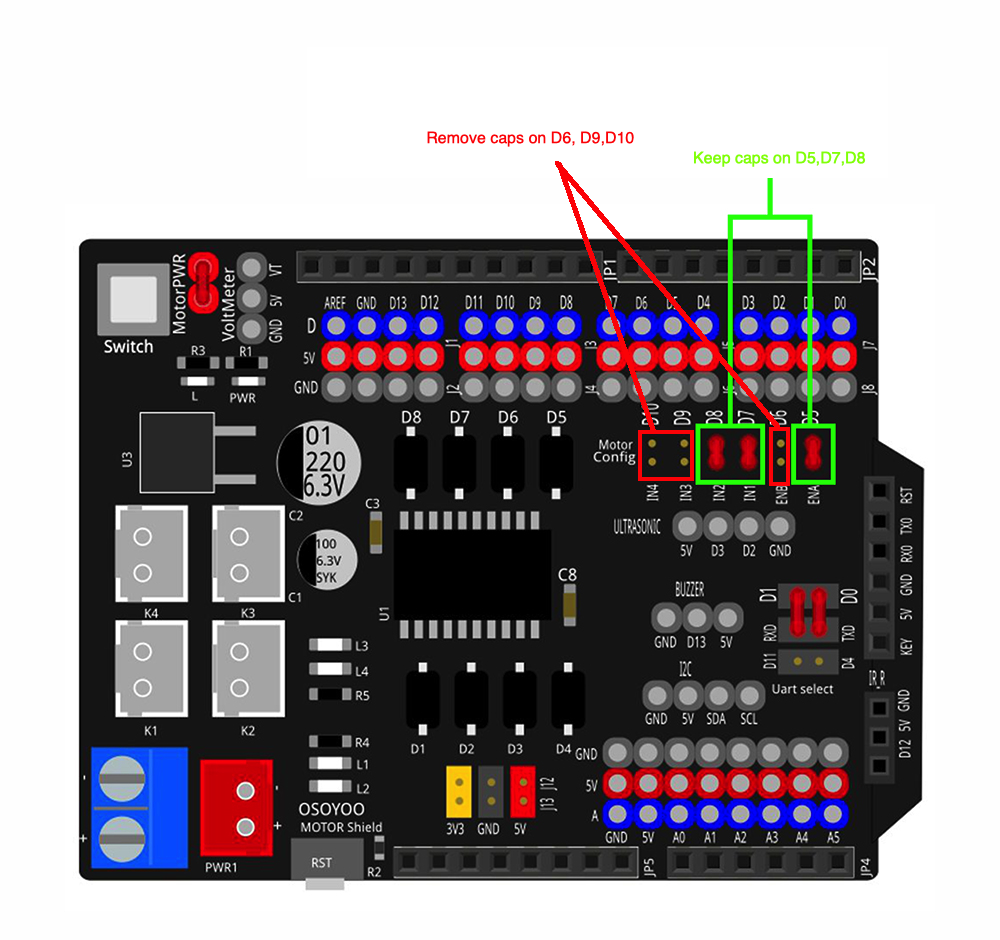
1)Entferne die Steckbrücken zwischen ENB-D6, IN3-D9, IN4-D10
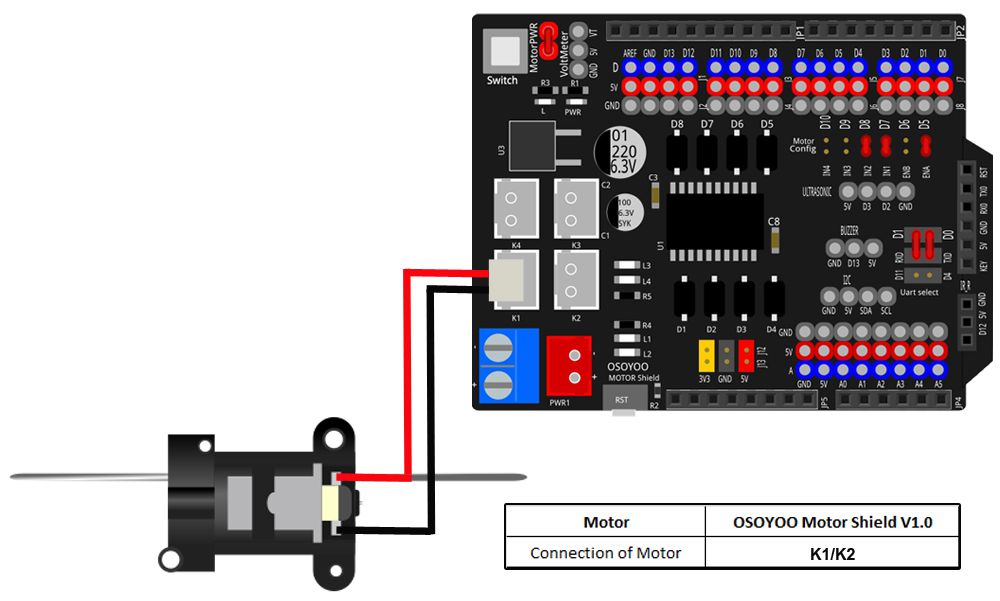
2) Verbinde den Motor zum Anschluss mit K1 oder K2 des OSOYOO Motor Shields
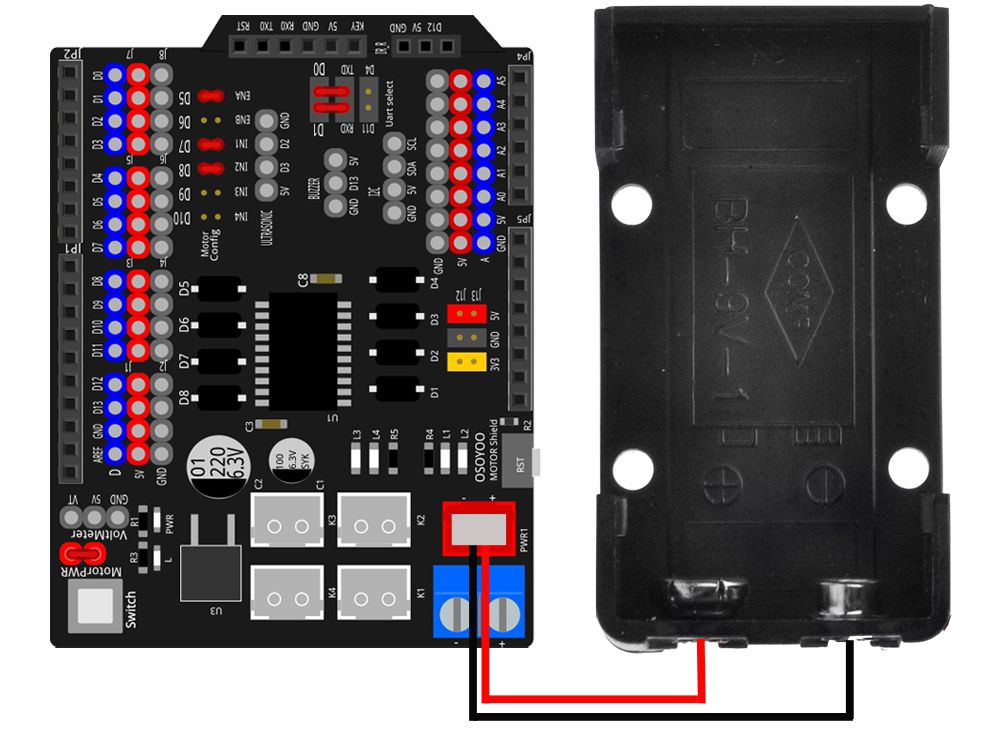
3) Verbinde die Batterie-Box zum PWR1-Anschluss des OSOYOO Motor Shields
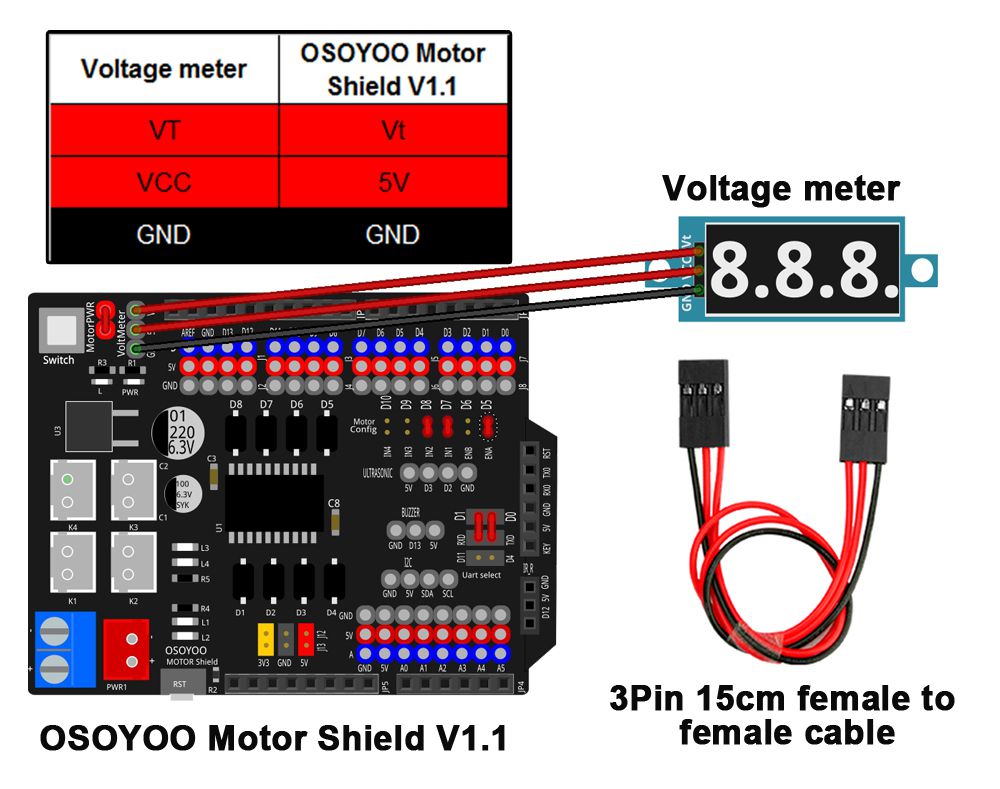
4) Verbinde das Voltmeter zum VoltMeter Anschluss des OSOYOO Motor Shields
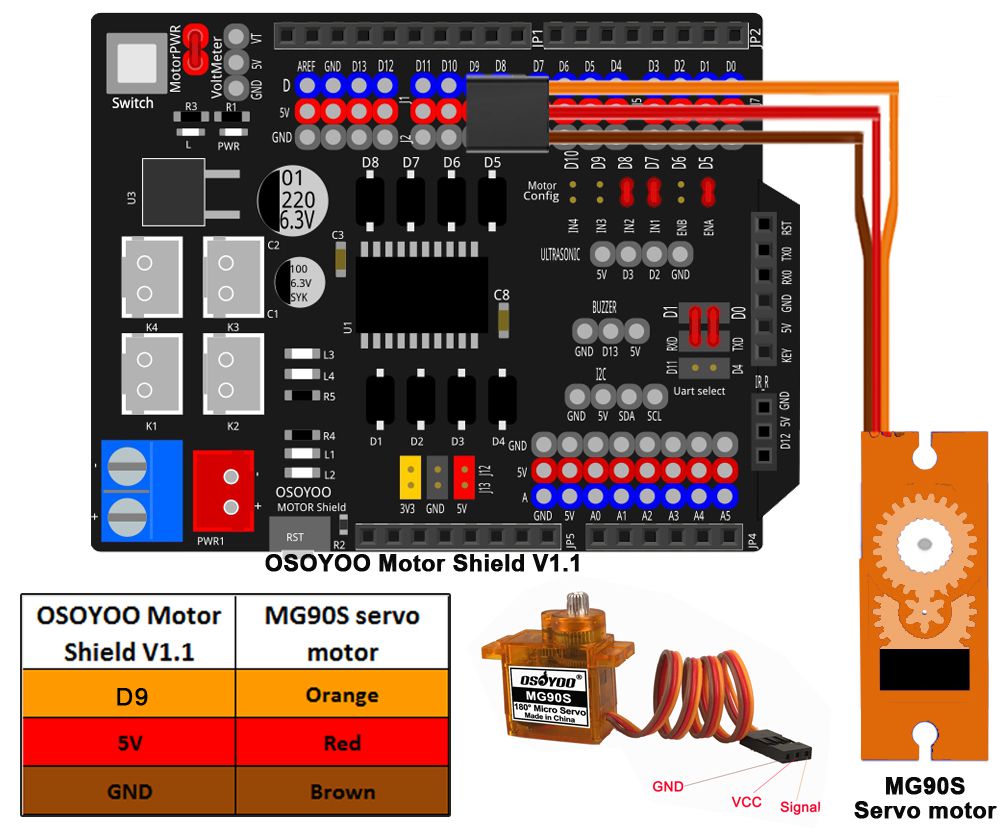
5) Verbinde den MG90S Motor Servo (orange) mit Reihe D9 des OSOYOO Motor Shields
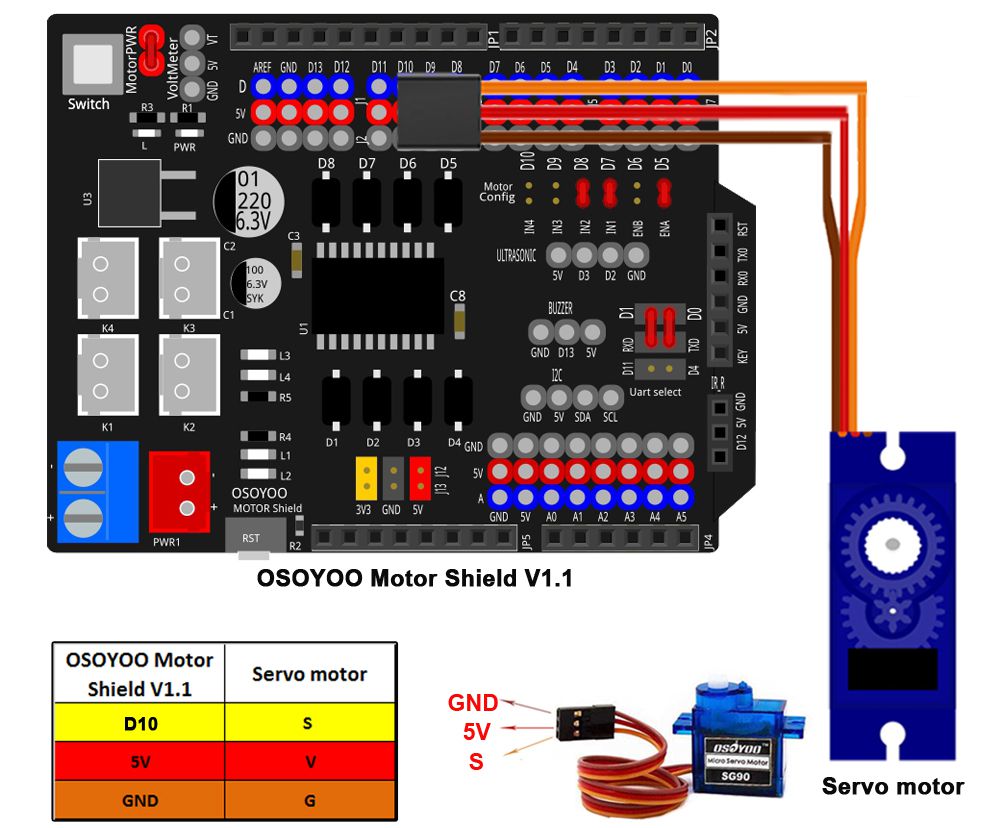
6) Verbinde den anderen Servo Motor (blau) mit Reihe D10 des OSOYOO Motor Shields
7) Verbinde den Ultraschall Sensor mit dem ULTRASONIC-Anschluss des OSOYOO Motor Shields; trenne dazu mit der Hand ein 4pin breites Band vom 20pin 15cm Kabel
8) Verbinde den Spurfolgesensor wie in der Tabelle und auf dem Bild gezeigt mit dem OSOYOO Motor Shield
Die Hardware-Installation ist jetzt nahezu komplett. Vor Einsetzen der Batterie in die Batteriebox müssen wir zuerst noch den Beispiel Code auf den OSOYOO Basic Board for Arduino laden.
(Falls Du bereits eine Arduino IDE (IDE = integrierte Entwicklungsumgebung) größer als Version 1.1.16 auf Deinem Computer installiert hast, überspringe bitte diesen Punkt.) Installiere die aktuelle Arduino IDE . Lade die Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en auf Deinen Computer, dann installiere die Software.
2. Installiere ein Packprogramm wie 7-zip zum Entpacken der Software-Files
Steuer Servo Ausrichtung
Bevor Du den Beispielcode (in Arduino auch Sketch genannt) ausführst, teste bitte zuerst die Steuer-Servo Ausrichtung:
Schritt 2. entpacke das File , wechsle in den Ordner servo, und suche das File steeringtest.ino
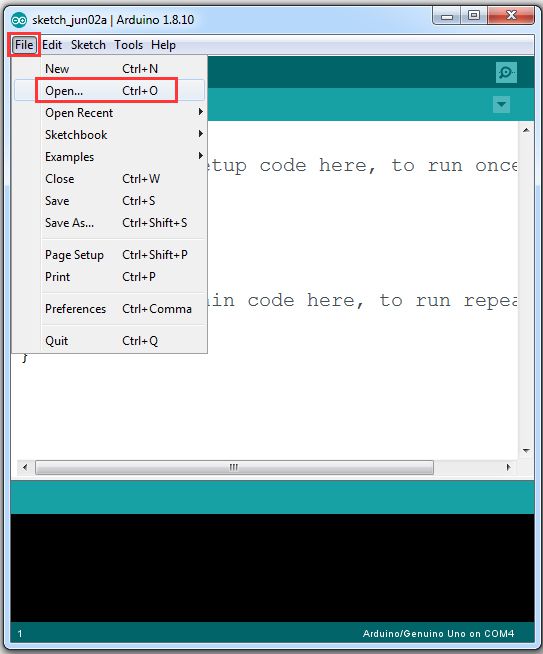
Schritt 3. Verbinde das UNO R3 Board über das USB-Kabel mit dem PC, starte die Arduino IDE -> klick File -> klick Open -> wähle “steeringtest.ino” im steeringtest Ordner und lade den Code in den Arduino Editor
Hinweis: Vor Hochladen eines Sketches auf den OSOYOO Basic Board for Arduino trenne bitte die Verbindung zur Batterie
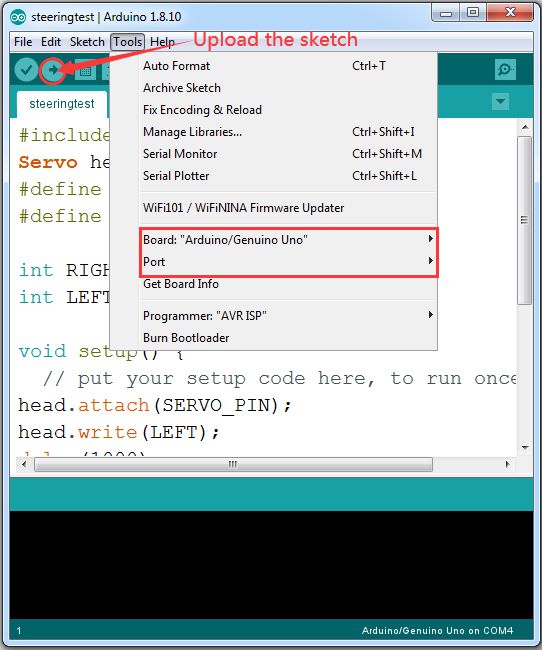
Schritt 4. Wähle das Roboterauto Board (Arduino Uno) und den von Deinem Computer benutzten COM-Port (den findest Du unter Port) und lade mit der Pfeiltaste den Sketch auf das OSOYOO Basic Board for Arduino
Schritt 5. Wenn Dein Steuer-Servo die Räder dann nicht genau nach vorne dreht (Fahrtrichtung geradeaus) hast Du zwei Möglichkeiten: Möglichkeit 1 ) Entferne die Schraube vom Servo-Horn, ziehe das Servo-Horn vom Servo ab, richte die Räder von Hand neu aus und befestige das Servo-Horn wieder auf dem Servo.
Möglichkeit 2) Kalibriere die Servo-Ausrichtung im Sketch in Zeile 4
#define FRONT 90
Wenn die Fahrzeugräder zu weit nach links zeigen, erhöhe den Wert von 90 auf 95, 100, 105…
Wenn die Fahrzeugräder zu weit nach rechts zeigen, verringere den Wert von 90 auf 85, 80, 75…
Lade und starte den Sketch erneut bis die Räder schließlich geradeaus zeigen.
Dann schreibe Dir diesen FRONT Wert auf; in den Lektionen 2, 3, 4, 5 und 6 werden wir ihn wieder nutzen und dafür sorgen, dass der Servo beim Standard FRONT Wert auch immer geradeaus zeigt.
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.


































Bonjour,
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
Cordialement,
Noah
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.