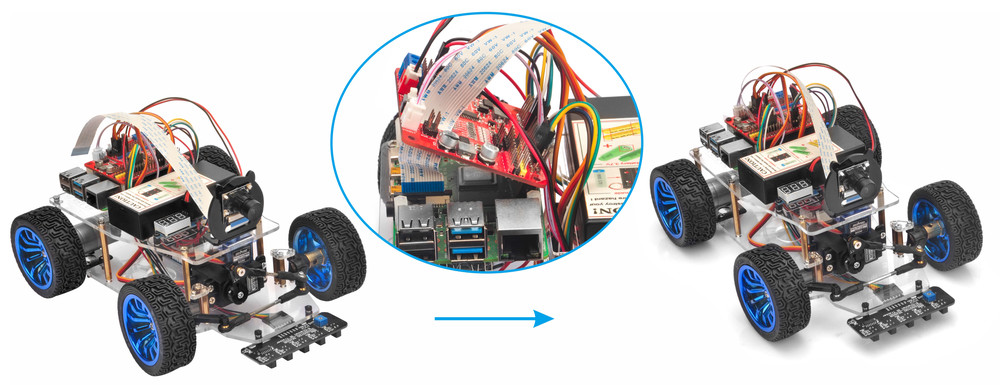
In dieser Lektion zeigen wir Dir, wie mit Hilfe von “flask” und “mjpeg-streamer” Softwarepaketen ein Raspberry Pi Roboterauto über das Internet gesteuert werden kann. Du kannst online die Fahrt des Autos über sein eigenes Auge (Frontkamera) verfolgen. Und sieh Dir bitte auch hier begleitend zum Tutorial-Text das Video an.
Schritt 1: Vor Beginn mit dieser Lektion musst Du Lektion 2 erfolgreich beendet haben. Und den blauen SG90 Servo wie in Lektion 4 gezeigt installiert und mit dem Port 14 des OSOYOO PWM HAT Boards verbunden haben.
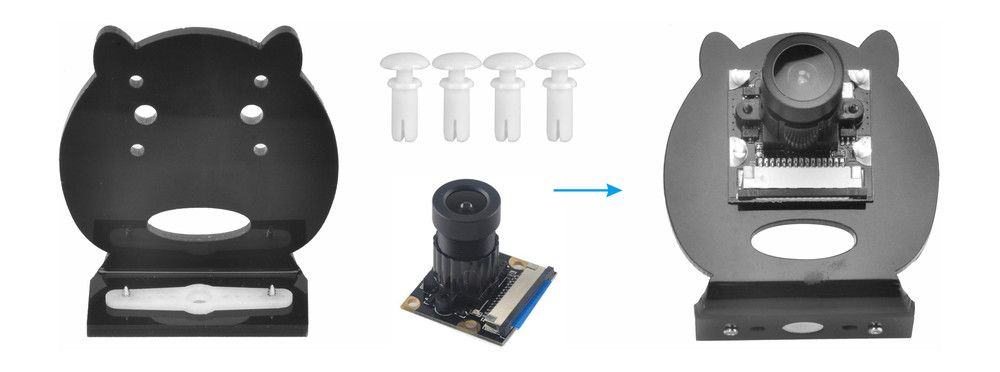
Schritt 2: Stecke das weiße, zweiflüglige Servohorn von oben in den Kamera-Halter und schraube es von der Unterseite mit selbstschneidenden Schrauben M1.5*6 fest.
Schritt 3: Befestige die CSI Kamera mit 4 Kunststoffnieten M2 im Kamera-Halter.
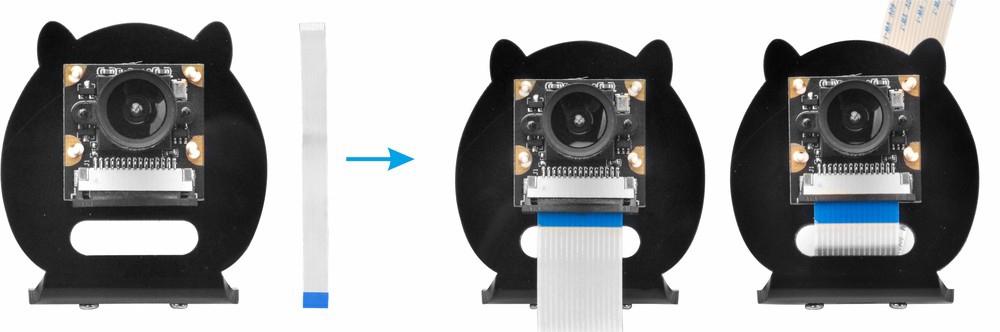
Schritt 4: Stecke das CSI-Flachbandkabel in die Kabelaufnahme der CSI Kamera und befestige das Kabel dann wie auf dem Bild gezeigt. (Achte auf den richtigen Sitz des Kabels vor Schließen der Kabelklemme.)
Schritt 5: Befestige den Kamera-Halter mit einer selbstschneidenden Schraube M2*4 auf dem Servo-Motor.
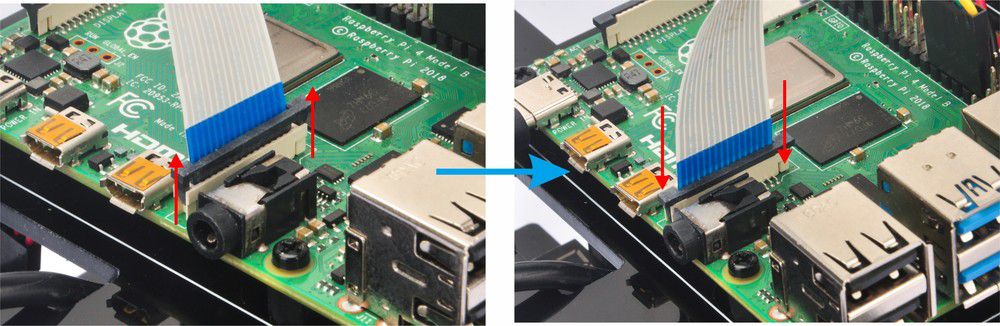
Stecke das von der CSI-Kamera kommende CSI-Flachbandkabel in den CSI Slot des Raspberry Pi. (Achte auf den richtigen Sitz des Kabels vor Schließen der Kabelklemme.)
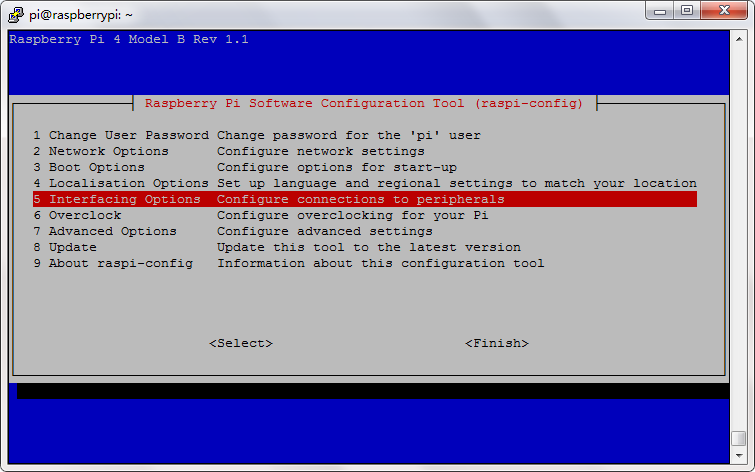
Schritt 1) Aktiviere die Kamera im Raspberry Pi durch Eingabe folgender Kommandos im Terminal:
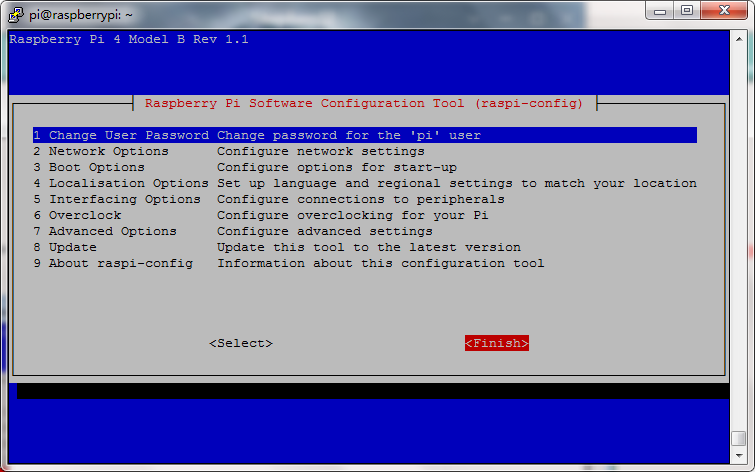
sudo raspi-config
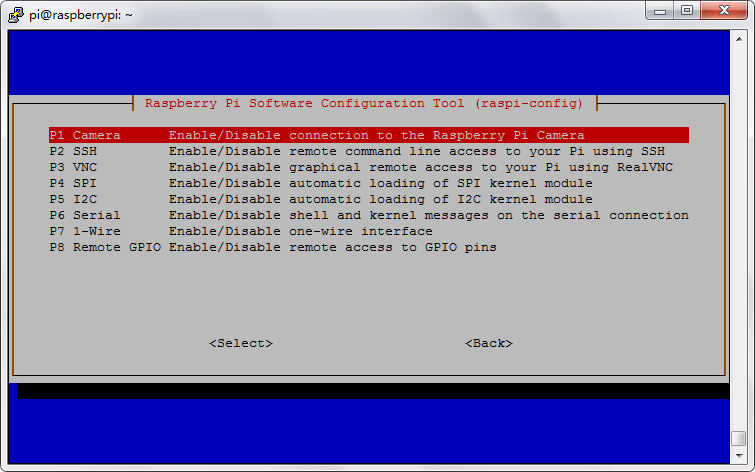
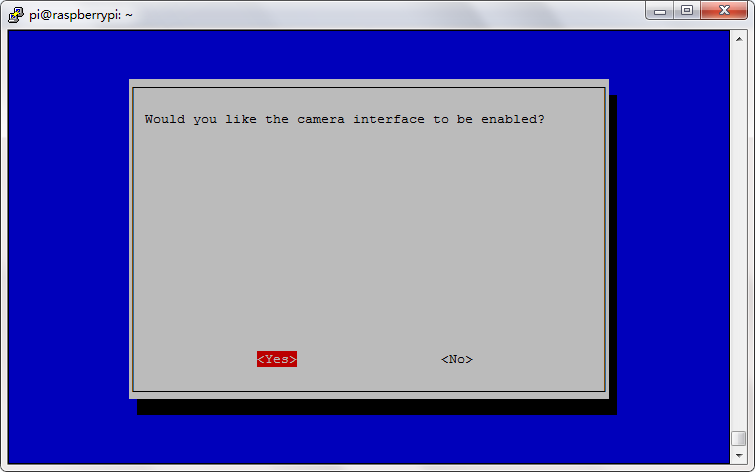
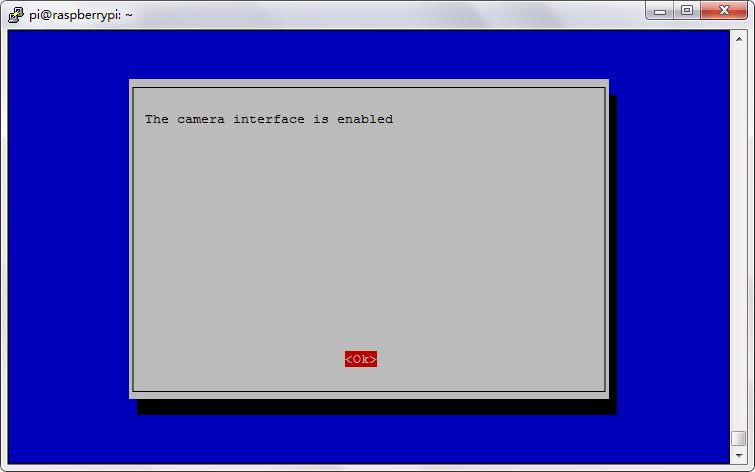
dann wähle ->5 Interfacing Options->P1 Camera->Yes->Ok->Finish (Bestätige entsprechend der Meldung den Raspberry Pi Neustart)
Schritt 2: Installiere die mjpeg-streamer Software mit folgenden Kommandos :
Nach Abarbeitung der Kommandos oben ist die mjpeg-streamer Software auf Deinem Raspberry Pi installiert. So einfach!
Schritt 3: Starte den jpeg-streamer Server in Deinem Raspberry Pi
Nach Eingabe des folgenden Kommandos im Terminal startet Dein mjpeg-streamer Server:
bash startcam.sh
Diese Meldung bedeutet, dass Dein Video-Server in Deinem Raspberry Pi zu Port 8899 verbunden ist.
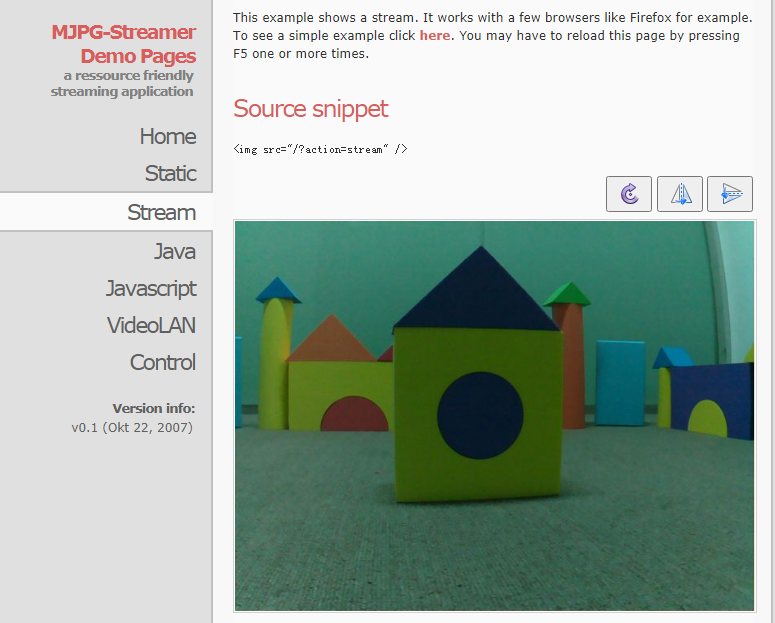
Schritt 4: Jetzt können wir mit unserem Browser das Überwachungsvideo testen. Gehe einfach zur Seite http://deine_raspberry_pi_ip:8899 (in unserem Beispiel http://192.168.0.34:8899),
klick “stream link” oder gehe direkt zu “http://deine_raspberry_pi_ip:8899/?action=stream”. Dann siehst Du im Browser das Überwachungsvideo.
Schritt 5: Öffne ein neues (zweites) Terminal-Fenster und starte die Installation der Software “OSOYOO Web Kamera gesteuertes Roboterauto” durch Eingabe folgenden Kommandos:
wget http://osoyoo.com/driver/servo-steer-car/piwebcar.sh
und dann gib folgendes Kommando ein:
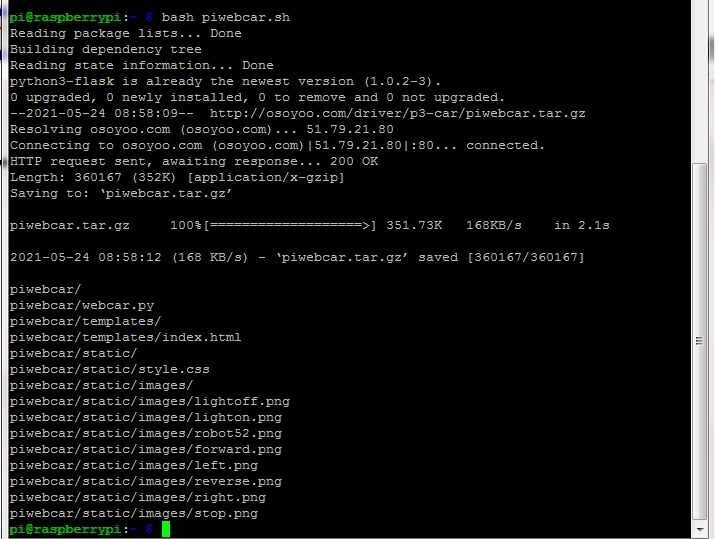
bash piwebcar.sh
Schritt 6: wechsle mit folgendem Kommando in der Ordner osoyoowebcar
cd piwebcar
Schritt 7: Dann gib zum Ändern des Files webcar.py folgendes Kommando ein:
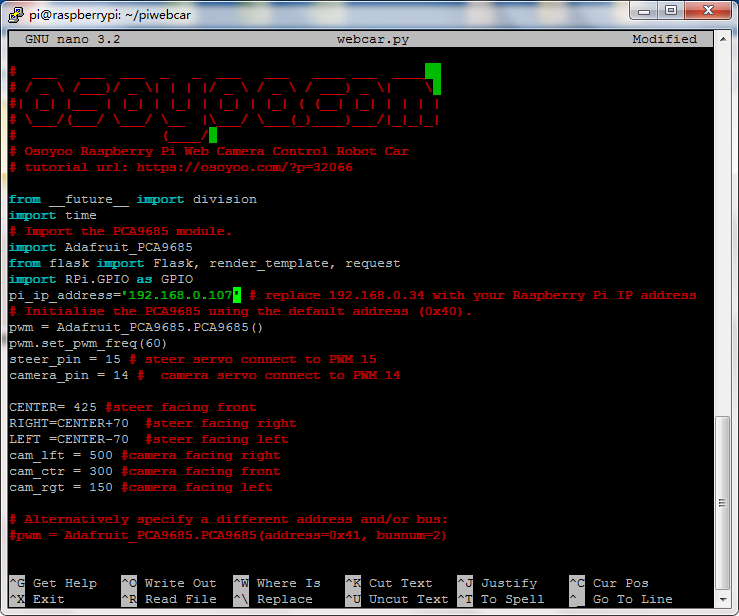
nano webcar.py
Ersetze die Adresse 192.168.0.34 in Zeile 15 mit der IP-Adresse Deines Raspberry Pi, klick “Ctrl”+”X”, dann zum Speichern des Files “Y” und dann klick “enter” zum Verlassen des Editors.
Schritt 8: Dann gib zum Ändern des Files templates/index.html folgendes Kommando ein:
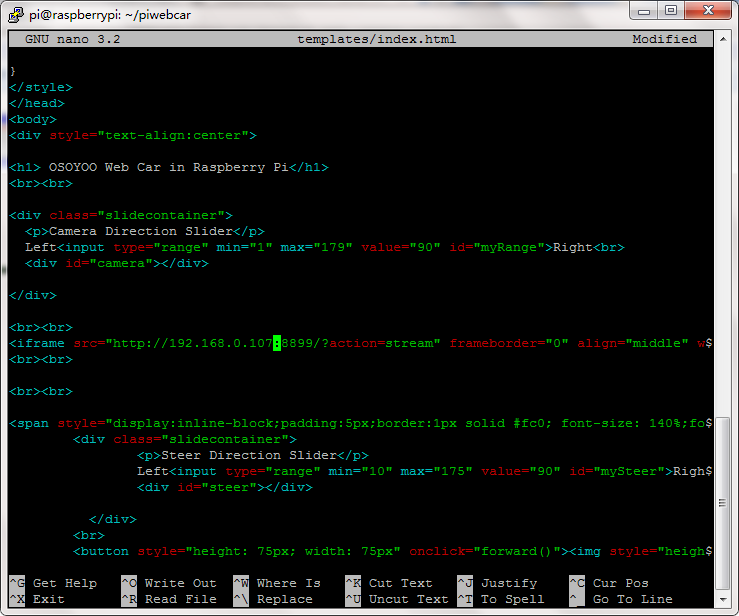
nano templates/index.html
Ersetze die IP-Adresse 192.168.0.34 in Zeile 34 mit der IP-Adresse Deines Raspberry Pi, klick “Ctrl”+”X”, dann zum Speichern des Files “Y” und dann klick “enter” zum Verlassen des Editors.
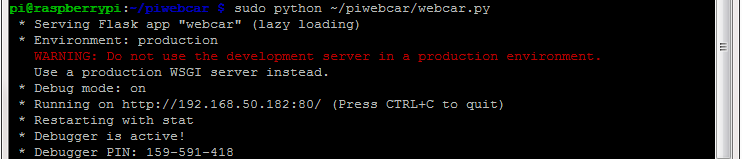
Schritt 9: Starte das Programm webcar.py durch Eingabe folgenden Kommandos:
sudo python ~/piwebcar/webcar.py
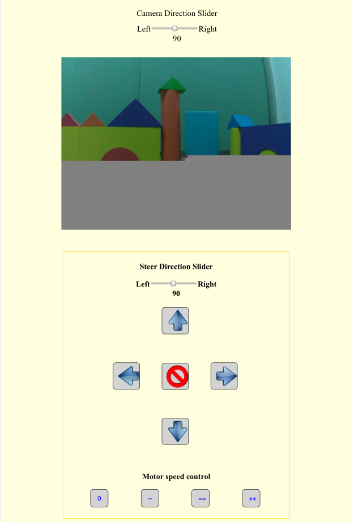
Schritt 10: Öffne auf Deinem PC oder Smartphone (die im selben WIFI Netzwerk wie Dein Raspberry Pi angemeldet sind) einen Browser und gehe zur Seite http://Deine_RaspberryPi_IP_Adresse. Dort siehst Du folgende Benutzeroberfläche:
Die Pfeiltasten dienen der Richtungssteuerung, der rote Kreis in der Mitte ist die STOPP-Taste. Unten gibt es vier Tasten zur Steuerung der Motorgeschwindigkeit:
0 bedeutet langsamste Geschwindigkeit
— bedeutet zweitlangsamste Geschwindigkeit
== bedeutet normale Geschwindigkeit
++ bedeutet schnellste Geschwindigkeit
Oben auf der Seite gibt es einen “Camera Direction Slider”; über die Betätigung dieses Schiebereglers kannst Du den Kamera-Servo verstellen und damit das Sichtfeld der Kamera.
Direkt über dem Steuerkreuz gibt es einen “Steer Direction Slider”; über diesen Schieberegler kannst Du die Stellung der Vorderräder verändern (als wenn Du in einem Straßenfahrzeug am Lenkrad drehen würdest).
Literatur: Marcelo Rovai : Python WebServer With Flask and Raspberry Pi
https://towardsdatascience.com/python-webserver-with-flask-and-raspberry-pi-398423cc6f5d















 und dann gib folgendes Kommando ein:
und dann gib folgendes Kommando ein: