Mecanum Wheel Robot Car Komplettpaket (mit 18650 Batterien)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In diesem Projekt werden wir Robot Car mit WIFI verbinden und eine APP verwenden, um das Auto über das Internet zu steuern. Dies ist eine typische Anwendung für das Internet der Dinge (IoT).
OSOYOO Mecanum-Räder Roboter-Auto-Chassis x 1 (2x linke Räder/2x rechte Räder und Motor x 4)
OSOYOO Mega2560 Board voll kompatibel mit Arduino x 1
OSOYOO WiFi-Schild x 1
OSOYOO Model Y Motortreiber x 1
OSOYOO MG90 Servomotor x 1
OSOYOO Ultraschallsensormodul x1
OSOYOO Ultraschallhalterung
OSOYOO 5-Punkt-Tracking-Sensormodul
OSOYOO 3-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 6-Pin-Überbrückungskabel von Stecker zu Buchse x2
OSOYOO 7-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 2-polige XH.25-Buchse auf Buchse x1
OSOYOO Batteriekasten x 1
18650 Batterien (3,7 V) x 2
If you just finishes all lesson 1 (assembling the car) and lesson 4( bluetooth imitation driver), please keep all lesson connections same as it is. Then plug out bluetooth from WIFI Shield.
Wenn Sie gerade alle Lektionen 1 (Zusammenbau des Autos) und Lektion 4 (Bluetooth-Imitationsfahrer) beendet haben, lassen Sie bitte alle Lektionsverbindungen unverändert. Stecken Sie dann Bluetooth von WIFI Shield aus.
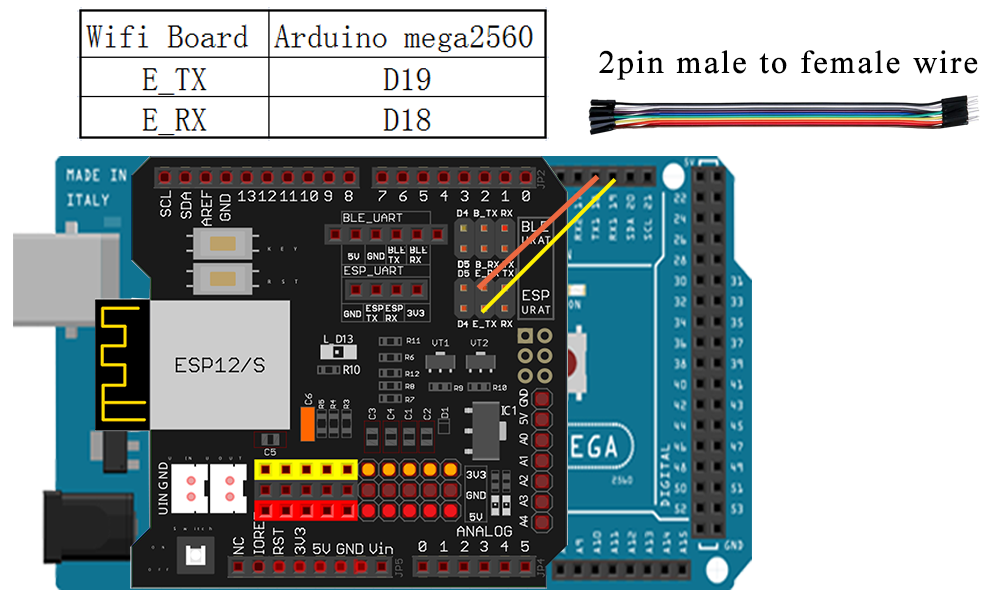
Schritt 1. Entfernen Sie die Verbindung B_TX zu D18 und B_RX zu D19.
Schritt 2. Verbinden Sie E_RX mit D18 (TX1) und E_TX mit D19 (RX1).
(Hinweis: Sie müssen 2 Stück Stecker-zu-Buchse-Überbrückungsdrähte aus unserem 10-teiligen Überbrückungskabelbündel aufteilen. Jede Farbe aus dem Bündel ist in Ordnung. Die restlichen 8 Stück Drähte dienen als Ersatzteile für möglicherweise gebrochene oder beschädigte Drähte)
Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step). Download Arduino IDE from https://www.arduino.cc/en/Main/Software?setlang=en ,then install the software.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt). Laden Sie Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en herunter und installieren Sie dann die Software.
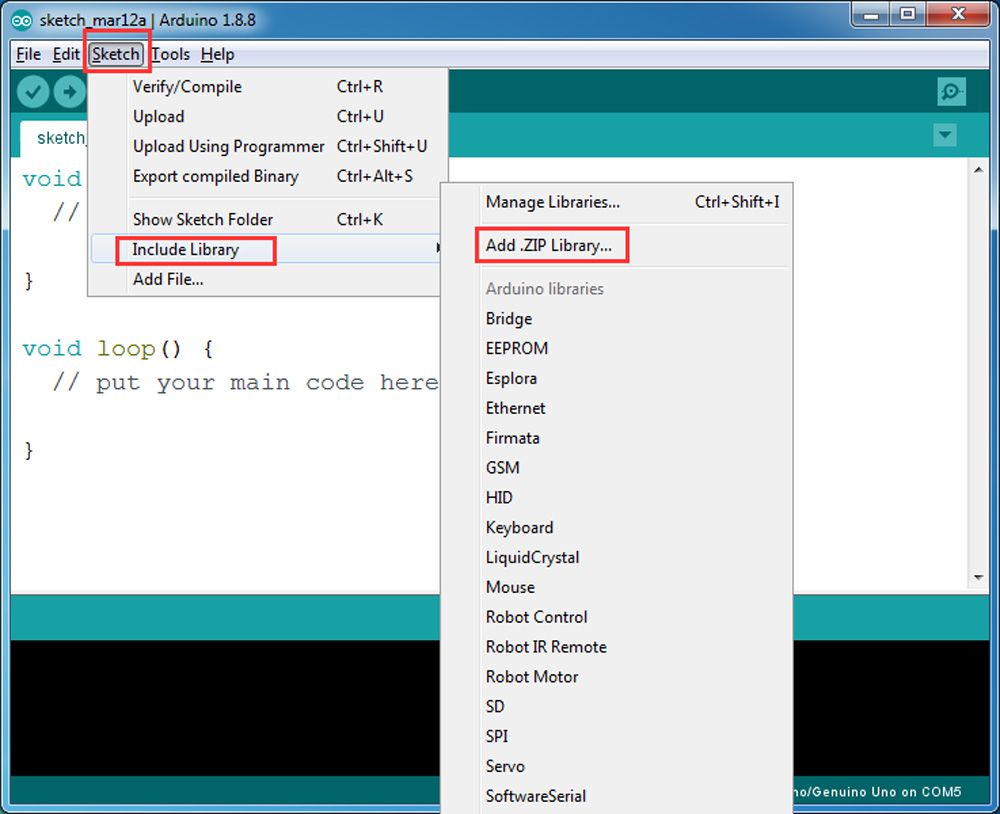
Schritt 2: Bitte laden Sie die ZIP-Datei der Bibliothek von WiFiEsp-master.zip herunter. Öffnen Sie die Arduino IDE -> klicken Sie auf Sketch -> Bibliothek einbeziehen -> ZIP-Bibliothek hinzufügen und laden Sie dann die obige ZIP-Datei in Arduino.
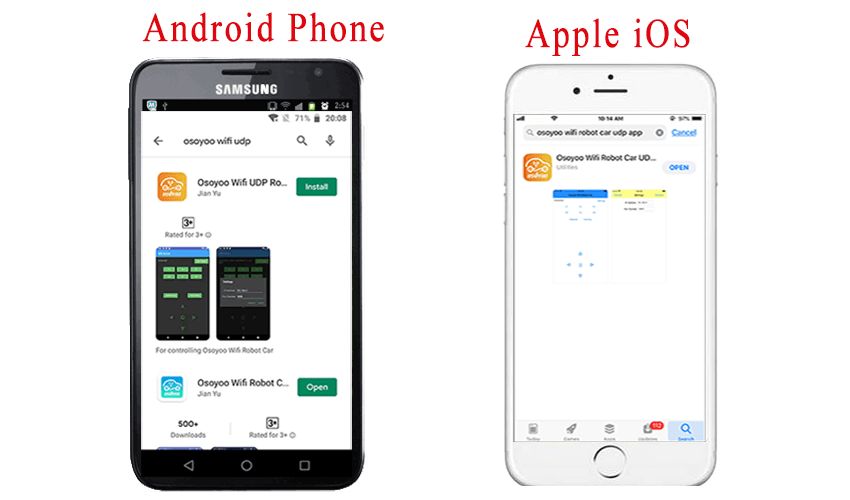
Schritt 3: APP-Installation – Sie müssen in Google Play oder im Apple Store nach „OSOYOO WIFI UDP Robot Car Controller“ suchen und dann diese APP installieren.
You can also download APP directly from https://osoyoo.com/driver/arduino-udp/udp-robot.apk
Entpacken Sie die heruntergeladene Datei, geben Sie den Ordner m2-lesson5 ein, Sie werden zwei Unterordner sehen :m2-lesson5A and m2-lesson5B
Diese beiden Ordner enthalten Programme für zwei WiFi-Modi: AP-Modus und STA-Modus. Die Arduino-Skizzen für diese beiden Modi sind unterschiedlich. Lassen Sie uns diese beiden Modi nacheinander erklären.
Wenn Sie im AP-Modus arbeiten, wird unser Roboterauto selbst zu einem WLAN-Hotspot. Unser Handy kann sich als WLAN-Client mit Robot Car verbinden. Die IP-Adresse des Roboters ist auf 192.168.4.1 festgelegt und nicht mit dem WAN verbunden.
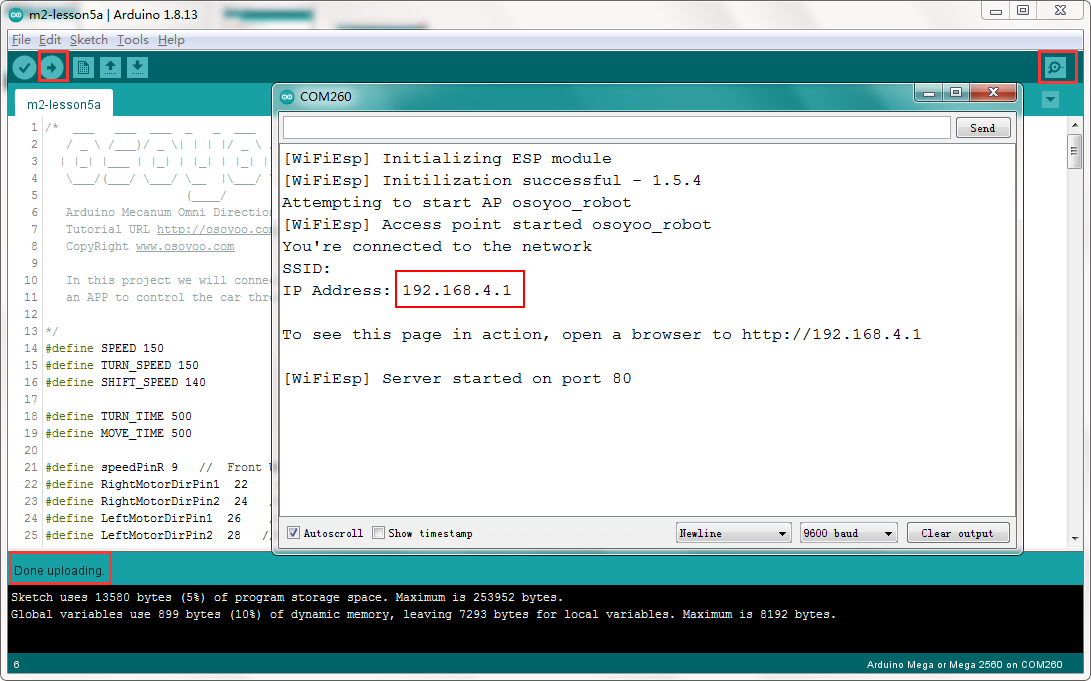
(1) Entpacken Sie die Datei m2-lesson5 und Sie sehen einen Ordner mit dem Namen m2-lesson5a. Laden Sie den Code in Arduino hoch.
(2) Öffnen Sie Ihren Arduino Serial Monitor, und Sie sehen ein ähnliches Ergebnis wie im AP-Modus. Eine neue WLAN-SSID „osoyoo_robot“ mit der IP-Adresse 192.168.4.1 wird im Fenster angezeigt. Das bedeutet, dass Ihr Roboterauto einen WIFI-Hotspot-Namen „osoyoo_robot“ hat, seine IP-Adresse ist 192.168.4.1
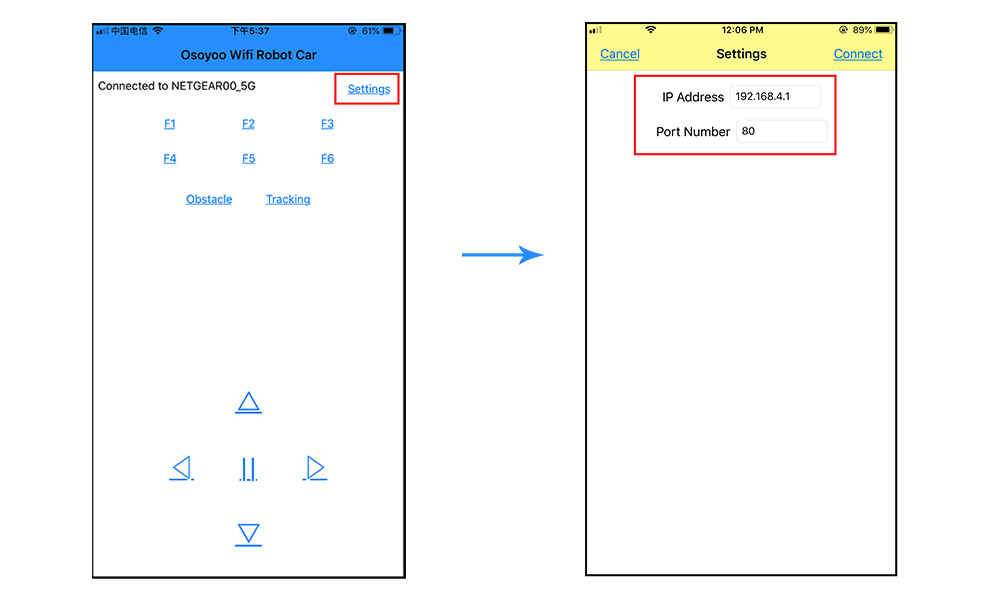
(3)Jetzt wird Ihr Roboterauto zu einem WIFI-Hotspot und legen Sie die IP-Adresse als „192.168.4.1“ in Ihrem APP-Einstellungsbereich fest.
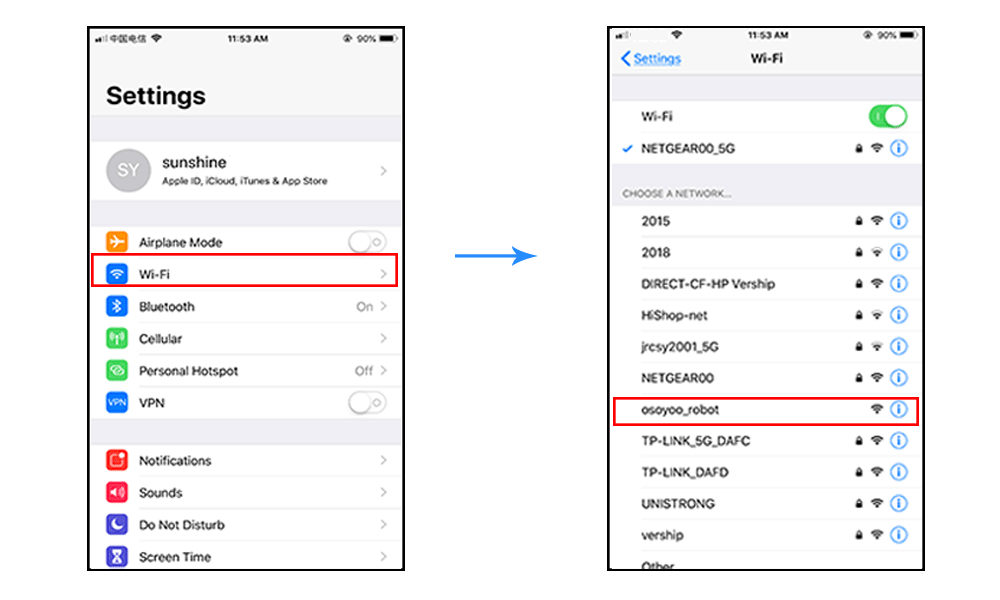
(4) Verbinden Sie Ihr Mobiltelefon mit dem WLAN-Hotspot „osoyoo_robot“, und Sie können das Roboterauto mit dem Mobiltelefon steuern.
(5)Sie können auf die Richtungstasten ◄ ► ▲ ▼ klicken, um das Auto zu bewegen. Verwenden Sie “||” Pause-Taste, um die Autobewegung zu stoppen.
Klicken Sie auf Hindernis, um nach links zu wechseln, klicken Sie auf Tracking, um nach rechts zu wechseln.
Klicken Sie auf F1, um eine diagonale Bewegung nach oben links auszuführen, klicken Sie auf F3, um eine diagonale Bewegung nach oben rechts auszuführen
Klicken Sie auf F4, um eine diagonale Bewegung nach hinten links auszuführen, klicken Sie auf F6, um eine diagonale Bewegung nach hinten rechts auszuführen.
Im STA-Modus funktioniert das Roboterauto nicht als WLAN-Hotspot. Stattdessen wird es zu einem Internetknoten in Ihrem LAN. Sie müssen Arduino Sketch mitteilen, was die WLAN-SSID und das Passwort Ihres lokalen Routers sind, dann spricht Arduino mit dem Router und erhält seine eigene LAN-IP-Adresse vom DHCP-Server. Sie können die Mobile APP verwenden, um auf die IP-Adresse des Roboterautos zuzugreifen und seine Bewegung zu steuern.
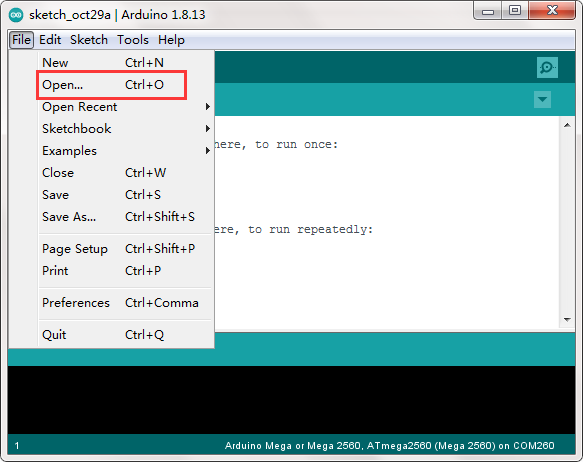
(1)Entpacken Sie die Datei m2-lesson5 und Sie sehen einen Ordner mit dem Namen m2-lesson5B. Laden Sie dann den Code m2-lesson5B.ino in Arduino.
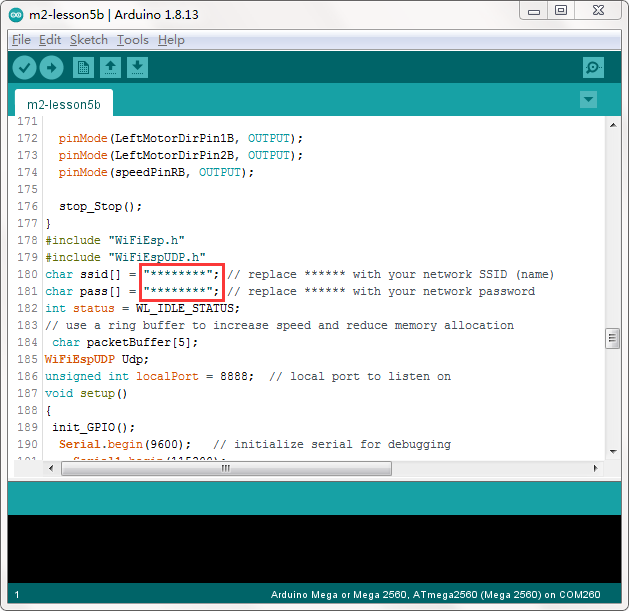
(2) Sie müssen den Code Zeile 176 und Zeile 177 ändern :
char ssid[] = “YOUR_ROUTER_SSID”; //Ersetzen Sie diese durch die WLAN-SSID Ihres Routers
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; //durch Ihr WLAN-Passwort ersetzen
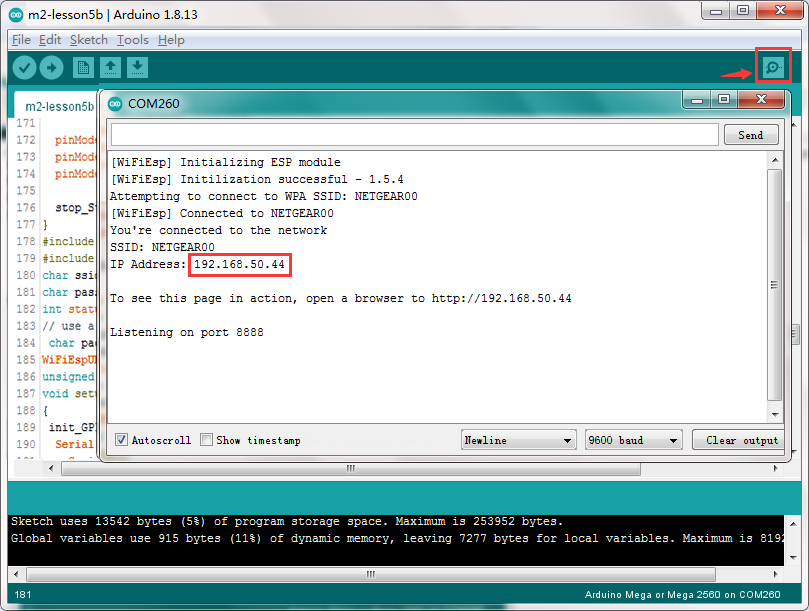
(3) Laden Sie die Skizze auf Arduino hoch. Klicken Sie schließlich auf das Serial Monitor-Fenster in der oberen rechten Ecke der Arduino IDE, Sie werden das folgende Ergebnis sehen:
(4)In diesem Modus sehen Sie eine IP-Adresse, die unsere LAN-IP-Adresse ist, die von meinem Router zugewiesen wurde. Bitte notieren Sie sich diese IP-Adresse und klicken Sie auf Einstellung, um die IP-Adresse des Roboters einzurichten, und legen Sie diese IP-Adresse in Ihrem APP-Einstellungsbereich fest (keine Änderung des Standardports 8888 in der APP erforderlich.
(5)Jetzt ist Ihr Roboterauto mit Ihrem LAN verbunden, Sie können das Mobiltelefon unter demselben LAN verwenden, um das Roboterauto zu steuern. Wenn sich Ihre APP im WAN befindet, müssen Sie zu Ihrem Router Control Panel gehen, Port 80 an die LAN-IP-Adresse des Roboterautos weiterleiten, dann können Sie die Router-IP verwenden, um das Auto zu steuern. Diese Funktion macht unser Roboterauto zu EINEM ECHTEN INTERNET OF THING-Gerät.
(6)Sie können auf die Richtungstasten ◄ ► ▲ ▼ klicken, um das Auto zu bewegen. Verwenden Sie “||” Pause-Taste, um die Autobewegung zu stoppen.
Klicken Sie auf Hindernis, um nach links zu wechseln, klicken Sie auf Tracking, um nach rechts zu wechseln
Klicken Sie auf Hindernis, um nach links zu wechseln, klicken Sie auf Tracking, um nach rechts zu wechseln..
Klicken Sie auf F1, um eine diagonale Bewegung nach oben links auszuführen, klicken Sie auf F3, um eine diagonale Bewegung nach oben rechts auszuführen.
Klicken Sie auf F4, um eine diagonale Bewegung nach hinten links auszuführen, klicken Sie auf F6, um eine diagonale Bewegung nach hinten rechts auszuführen.
FAQ zur WIFI UDP APP und Sketch Code:
Q1)So stellen Sie die Geschwindigkeit des Roboterautos ein? A:Wenn Sie die Geschwindigkeitsleistung des Roboterautos ändern möchten, folgen Sie bitte den Parametern in Zeile 11 bis 13:
SPEED value bestimmt die Vorwärtsfahrgeschwindigkeit
TURN_SPEED value bestimmt die Drehgeschwindigkeit
SHIFT_SPEED value bestimmt die Parallelschaltgeschwindigkeit
Q 2)Was passiert, wenn Sie in der OSOYOO WiFi UDP Robot Car APP Tasten drücken ? A: Wenn Sie eine Taste der APP drücken, sendet die APP eine Einzelbuchstabennachricht über das UDP-Protokoll an das Zielgerät (in diesem Beispiel unser Arduino WIFI Shield)
Taste
UDP-Nachricht
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
square
E
F7
O
F8
T
Q3)Wie geht Arduino mit dem UDP-Befehl um?
Zeile 233 bis Zeile 250 in der Datei m2-lesson5A.ino sind die Codes, die auf den Befehl des Mobiltelefons reagieren. Wenn beispielsweise ▲ gedrückt wird, wurde gemäß Q1-Tabelle ein Befehl mit dem Buchstaben „A“ vom Mobiltelefon an Arduino gesendet. Zeile 233 Fall ‚A‘ …. Aussage wird das Auto machen Auto vorwärts bewegen.
char c=packetBuffer[0];
switch (c) //serial control instructions
{
case 'A':go_advance(SPEED);;break;
case 'L':left_turn(TURN_SPEED);break;
case 'R':right_turn(TURN_SPEED);break;
case 'B':go_back(SPEED);break;
case 'E':stop_Stop();break;
case 'F':left_shift(0,150,0,150);break; //left ahead
case 'H':right_shift(180,0,150,0);break; //right ahead
case 'I':left_shift(150,0,150,0); break;//left back
case 'K':right_shift(0,130,0,130); break;//right back
case 'O':left_shift(200,150,150,200); break;//left shift
case 'T':right_shift(200,200,200,200); break;//left shift
default:break;
}
I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.

















I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.