Compra el Kit de Coche Robot V2.1 Plus (con baterías 18650 y cargador USB) en el siguiente enlace:
| Comprar en OSOYOO |
Comprar en EE. UU. |
Comprar en Reino Unido |
Comprar en Alemania |
Comprar en Italia |
Comprar en Francia |
Comprar en España |
Comprar en Japón |
 |
 |
 |
 |
 |
 |
 |
 |
Compra el Coche Robot V2.1 sin batería ni cargador:
| Comprar en OSOYOO |
Comprar en EE. UU. |
Comprar en Reino Unido |
Comprar en Alemania |
Comprar en Italia |
Comprar en Francia |
Comprar en España |
Comprar en Japón |
|
|
|
|
|
|
|
|
🤖 ¿Listo para construir este coche robot?
OSOYOO V2.1 Kit de Coche Robot — Kit oficial del tutorial
Wi-Fi · Bluetooth · Seguimiento de línea · Evitación de obstáculos · 8 lecciones · APP para iOS/Android — todo lo que cubre este tutorial, en una sola caja
Descripción:
El kit de aprendizaje de coche robótico OSOYOO está diseñado para principiantes. Con él aprenderás a programar en Arduino y obtendrás experiencia práctica en diseño y ensamblaje de robots.
Hemos desarrollado un tutorial paso a paso que va desde un coche sencillo sin ningún control hasta un coche robótico multifunción controlado por una aplicación móvil.
Cada lección incluye código de ejemplo comentado, esquema de circuito, instrucciones de ensamblaje y vídeo. Aunque no tengas experiencia en programación, puedes seguir las instrucciones paso a paso y convertirte poco a poco en un experto.
Nuestro coche robótico es 100% de código abierto. Si eres un usuario intermedio y tienes tiempo para leer los comentarios de nuestro código, puedes personalizar fácilmente este coche robótico para crear tu propio proyecto de feria de ciencias, tarea universitaria o incluso aplicaciones comerciales.
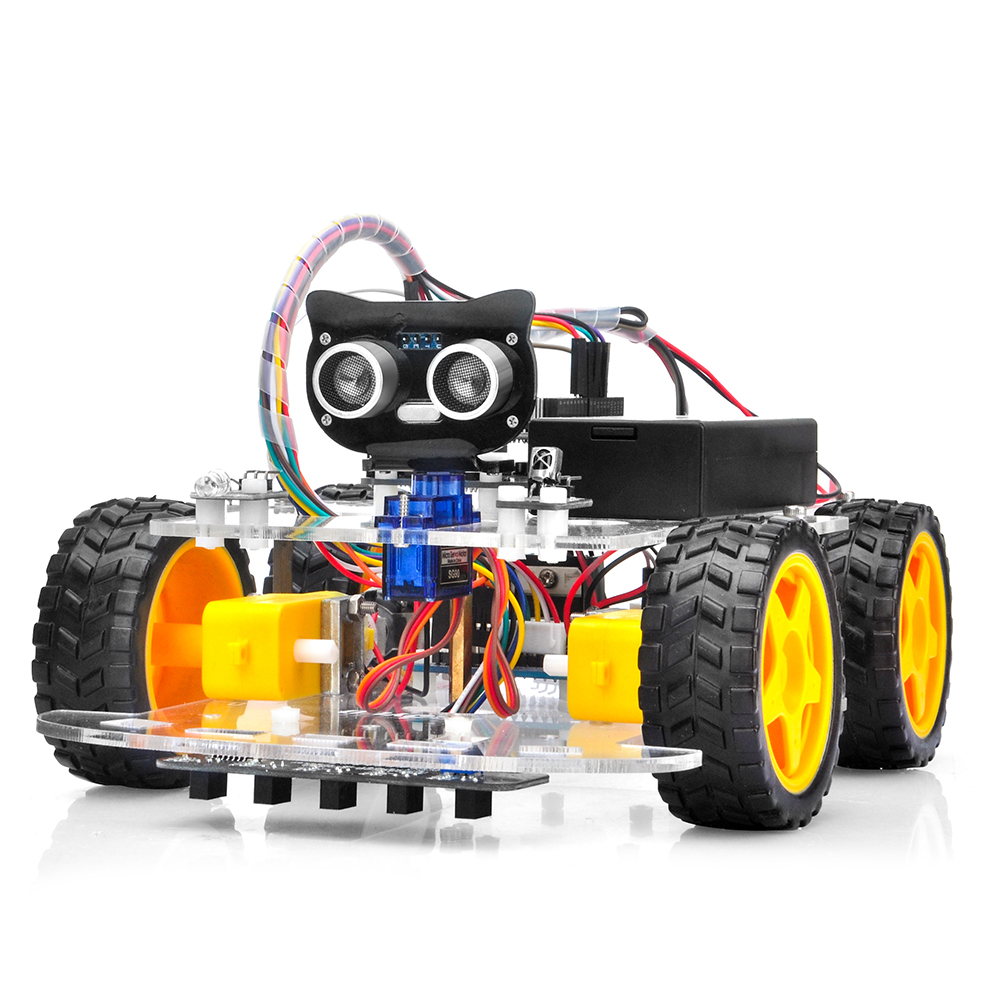
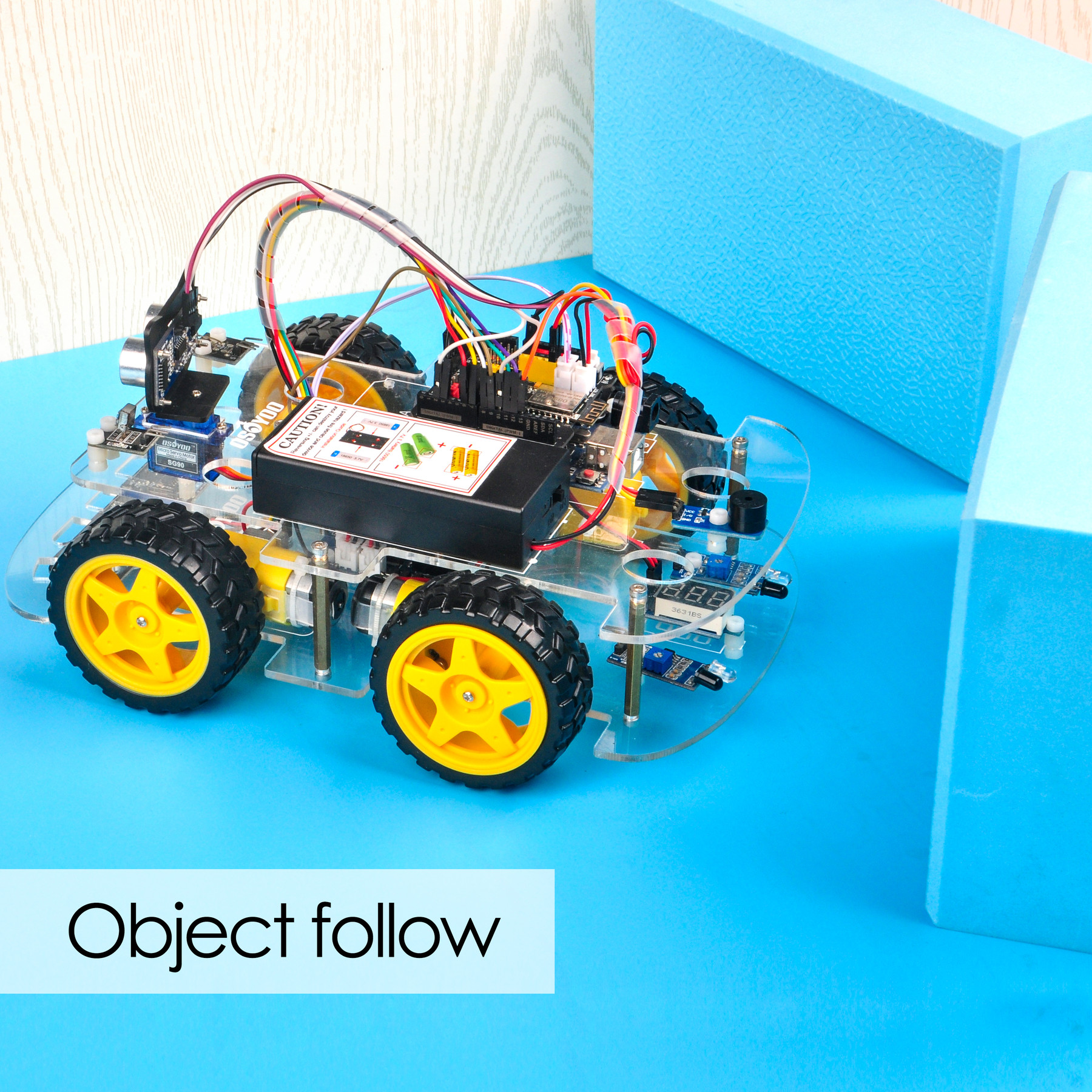
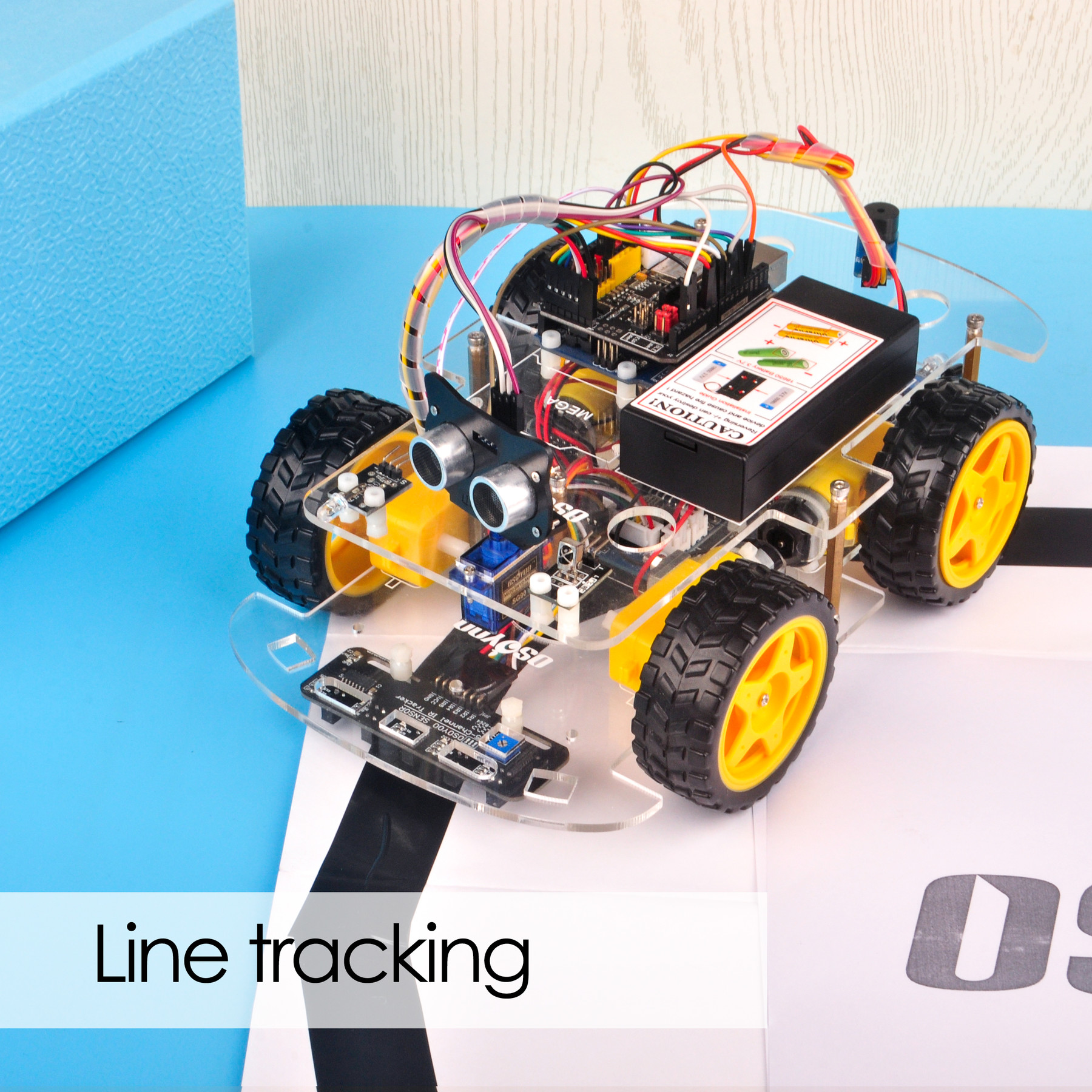
Este kit contiene piezas modulares, incluidos el módulo controlador de motores OSOYOO MODEL X (*), el módulo de sensor ultrasónico, el módulo de seguimiento, el control remoto por infrarrojos, el módulo Bluetooth y el escudo Wi-Fi ESP8266, entre otros. Con estos módulos, el coche robot puede funcionar en múltiples modos: avance automático, control por infrarrojos, evitación de obstáculos y seguimiento de línea. Puedes usar nuestra APP para Android para cambiar el modo de funcionamiento mediante Wi-Fi o Bluetooth.
*El módulo controlador de motores OSOYOO MODEL X es una versión mejorada del módulo L298N. Cuenta con conectores de cableado de nuevo diseño que simplifican enormemente el proceso de ensamblaje y mejoran la estabilidad de las conexiones.
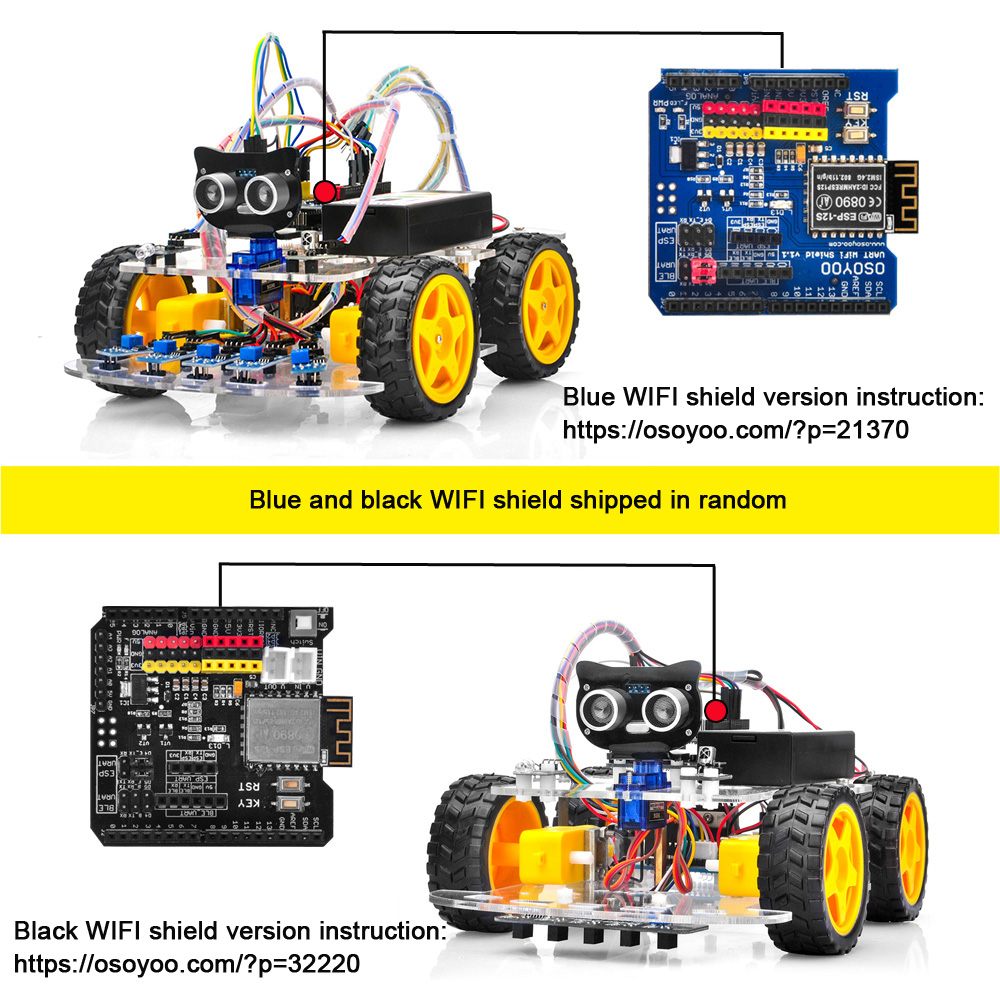
Disponemos de dos versiones del escudo Wi-Fi. Los escudos Wi-Fi azul y negro se envían de forma aleatoria.
Si recibes el escudo Wi-Fi azul, sigue estas instrucciones: https://osoyoo.com/?p=21370.
Si recibes el escudo Wi-Fi negro, sigue estas instrucciones: https://osoyoo.com/?p=32220.
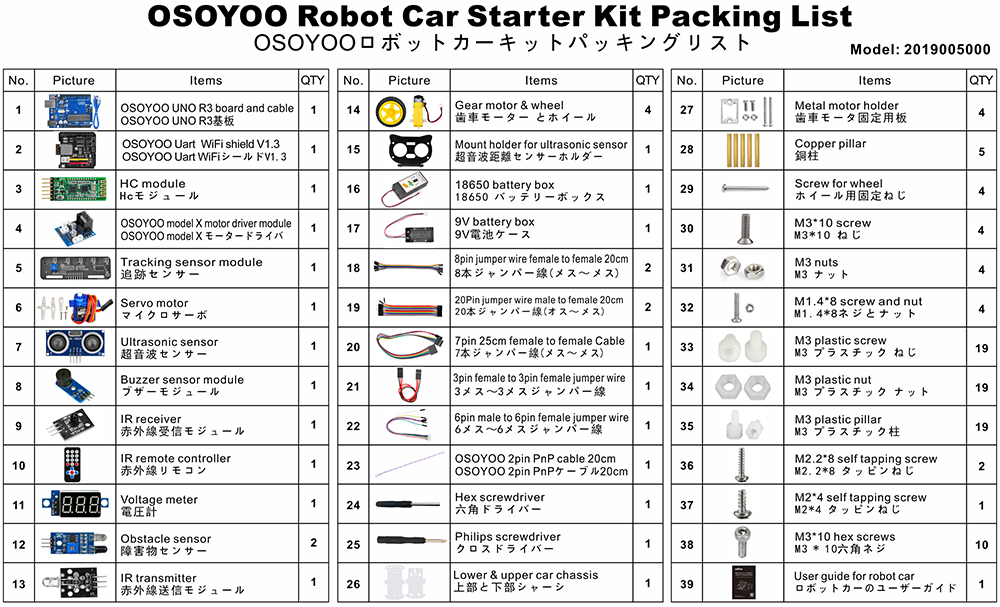
Lista de componentes:
Ofrecemos dos tipos de kits de coche robot. Uno incluye 2 portapilas (caja para batería 18650 y caja para batería de 9V); el otro incluye 1 par de baterías 18650 y un cargador de batería.
La siguiente lista corresponde al kit con 2 portapilas
La siguiente lista corresponde al kit con batería y cargador
Para más detalles sobre cada pieza y dispositivo, haz clic aquí
✅ Este tutorial fue escrito para el Kit de Coche Robot OSOYOO V2.1
Las 8 lecciones, el código de ejemplo y los esquemas de circuito de esta página están diseñados específicamente para este kit.
Compra directamente en la tienda OSOYOO y ahorra un 10% — además de envío gratuito en pedidos superiores a $70.

Kit de Coche Robot OSOYOO V2.1
🔋 Con batería y cargador:
$61.02
$67.80
— código ROBOTCAR10
📦 Sin batería: usa el mismo código para un 10% de descuento
Tutoriales básicos
Hemos preparado algunos tutoriales básicos para principiantes que aún no conocen Arduino. Esta sección explica qué es Arduino y muestra cómo empezar con proyectos sencillos. Arduino es la plataforma de hardware de código abierto más grande del mundo. Ofrece infinitas posibilidades con productos simples basados en microcontroladores. Aprender a programar en la plataforma Arduino es un viaje que nunca deja de crecer.
Con este soporte de hardware y software, estarás en camino de convertirte en un programador experto en poco tiempo. ¡Consigue el kit y comienza tu proyecto hoy!
Tutorial y proyectos de ejemplo
Piezas y dispositivos





























































Could you help me to change some lines in the code, more speed when its following the line, to folow a withe line, and dected some object and stop when this happends. please help
Please open the codes which you want to revise, and find the lines:
#define FAST_SPEED 150
#define MID_SPEED 140
#define SLOW_SPEED 130
you can change the value from 0 ~ 255.
done, thanks,it works.
Could you help me to change the code to follow a white line?
For line tracking mode, the value “1” means the tracking sensor is on black line, the value “0” means the tracking sensor is on white line.
Please find the following lines of the lesson 4 code and exchange black line value to white line value:
void auto_tracking(){
String sensorval= read_sensor_values();
Serial.println(sensorval);
if ( sensorval==”10000″ )
{
//The black line is in the left of the car, need left turn
go_Left(); //Turn left
set_Motorspeed(FAST_SPEED,FAST_SPEED);
}
if (sensorval==”10100″ || sensorval==”01000″ || sensorval==”01100″ || sensorval==”11100″ || sensorval==”10010″ || sensorval==”11010″)
{
go_Advance(); //Turn slight left
set_Motorspeed(0,FAST_SPEED);
}
if ( sensorval==”00001″ ){ //The black line is on the right of the car, need right turn
go_Right(); //Turn right
set_Motorspeed(FAST_SPEED,FAST_SPEED);
}
if (sensorval==”00011″ || sensorval==”00010″ || sensorval==”00101″ || sensorval==”00110″ || sensorval==”00111″ || sensorval==”01101″ || sensorval==”01111″ || sensorval==”01011″ || sensorval==”01001″)
{
go_Advance(); //Turn slight right
set_Motorspeed( FAST_SPEED,0);
}
if (sensorval==”11111″){
stop_Stop(); //The car front touch stop line, need stop
set_Motorspeed(0,0);
}
For example, the value of “sensorval==”01100″” mean the left 2 and left 3 tracking sensors are on black line and the other tracking sensors are on white line. if the left 2 and left 3 tracking sensors are on white line and the other tracking sensors are on black line, the code value is “sensorval==”10011″”
hope these will help you.
Ok, so i have to change all the values, like that? (code bellow) i change al the “1” for “0”
void auto_tracking(){
String sensorval= read_sensor_values();
Serial.println(sensorval);
if ( sensorval==”01111″ )
{
//The black line is in the left of the car, need left turn
go_Left(); //Turn left
set_Motorspeed(FAST_SPEED,FAST_SPEED);
}
if (sensorval==”01011″ || sensorval==”10111″ || sensorval==”10011″ || sensorval==”00011″ || sensorval==”01101″ || sensorval==”00101″)
{
go_Advance(); //Turn slight left
set_Motorspeed(0,FAST_SPEED);
}
if ( sensorval==”11110″ ){ //The black line is on the right of the car, need right turn
go_Right(); //Turn right
set_Motorspeed(FAST_SPEED,FAST_SPEED);
}
if (sensorval==”11100″ || sensorval==”11101″ || sensorval==”11010″ || sensorval==”11001″ || sensorval==”11000″ || sensorval==”10010″ || sensorval==”10000″ || sensorval==”10100″ || sensorval==”10110″)
{
go_Advance(); //Turn slight right
set_Motorspeed( FAST_SPEED,0);
}
if (sensorval==”00000″){
stop_Stop(); //The car front touch stop line, need stop
set_Motorspeed(0,0);
}
Yes, please have a try.
Hola me puedes ayudar por favor no soy capaz de encontrar el software para el osoyoo 2.1 que debería ser la versión 1.8.8 soy nuevo en esto y me estoy volviendo loco seri de gran ayuda para mi
buenos dias e adquirido un osoyoo 2.1 y no soy capaz de descargarme el software necesito ayuda ya que soy nuevo en este mundo
no soy capad de encontrar la version 1.8.8 no se si an sacado alguna actualizacion
Do you mean you want to download the Arduino IDE V1.8.8?
Please visit the link: https://www.arduino.cc/en/software/OldSoftwareReleases
Si muchas gracias por que no avía manera de encontrar la esa versión ya te comentaré el resultado
ciao come faccio ad eliminare i tempi di fermo rover quando non ha ostacoli vicino?
Grazie
Please can you help me with a code that will make mine go round circles? I have tried several means, but not working, please
I am not so clear? Make the robot turn in place? Due to changes in current or uneven ground, the robot’s trajectory may change
I am working on a project that would make this car go round a circles of a particular radius
Please I am having issue trying to write a code that uses both obstacle avoidance sensor the IR sensor all in the same code or program. Please can you help me out please.
Please I am having issue trying to write a code that uses both obstacle avoidance sensor the IR sensor all in the same code or program. Please can you help me out please.
In Lesson 7 there are several unused custom buttons. I would like to use the custom button F2 to make the buzzer sound. What letter in the Uart_Date stream corresponds to F2 (also what letter corresponds to F4)?
Nevermind F2 is G and F4 is I (too tired to think of monitoring the UART_Date variable on the Serial Monitor when I posted)
Hello. Voltage seems to be alright at 7.30 but whenever I turn on the car it’s just constantly turning left.
How may one establish a connection between a servo motor and an Arduino microcontroller? The servo motor is equipped with a female connector. However, the provided kit solely comprises male-to-female and female-to-female connectors. What course of action is recommended to address this situation?
hey, so I am trying to modify the code from lesson one. I am trying to make the robot go around in a circle of a 3m diameter after going forward for 2 seconds. Could you please help me with a code that makes the robot go around in a circle of a particular diameter?
I was building the remote control car and when I was going to use the remote, the car would not move at all. I checked to see if the battery was in the remote and to see if it was in the right way, and it was. I was wondering what was wrong. Thank you
Ich habe das Auto fertiggestellt. Es zeigt die gemessene Entfernung zum Hindernis im seriellen Monitor richtig an, fährt aber nur rückwärts oder dreht sich im Kreis, obwohl vorne ausreichend Abstand zur Verfügung steht. Es fährt nicht nach vorwärts auf das Hindernis zu, so wie es erwartet würde. Wo liegt der Fehler?
Woher wissen Sie „Es zeigt die gemessene Entfernung zum Hindernis im seriellen Monitor richtig an“?
how do you know “It correctly displays the measured distance to the obstacle in the serial monitor”?
I installed the Driving app from the Apple Store on my iPad (iOS 16.6.1), but the motion sensor isn’t working and I can’t control the left and right. What should I do?
Are you talking about the lesson 7 immitation driving bluetooth APP?
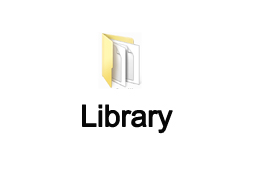
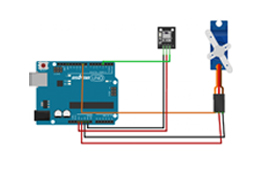
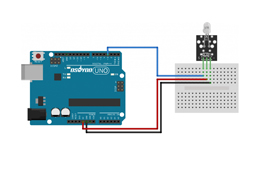
please make sure that you have correctly connected the B_TX to D4 and B_RX to D5 using jumper caps, see following picture.
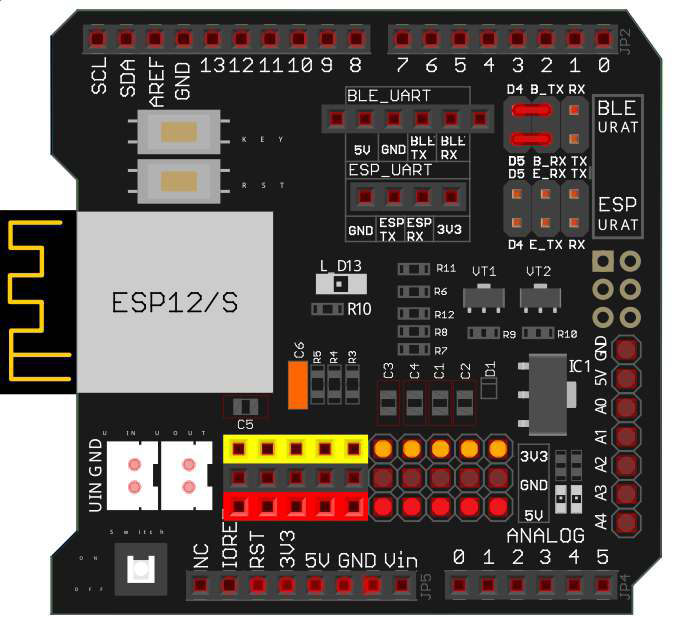
Some people put the jumper caps in the lower location(E_TX to D4 and E_RX to D5), that is WRONG and your Arduino can not get signal from Bluetooth chip.
Thank you for your comment.
Other iOS apps work without changing the hardware settings, so I don’t think it’s a problem with the robot’s hardware.
Did you enable the bluetooth sensor and motion sensor in you iPad? Can you connect the HC-02 bluetooth device?