¡Bienvenido a la primera lección de auto inteligente!
Objetivo
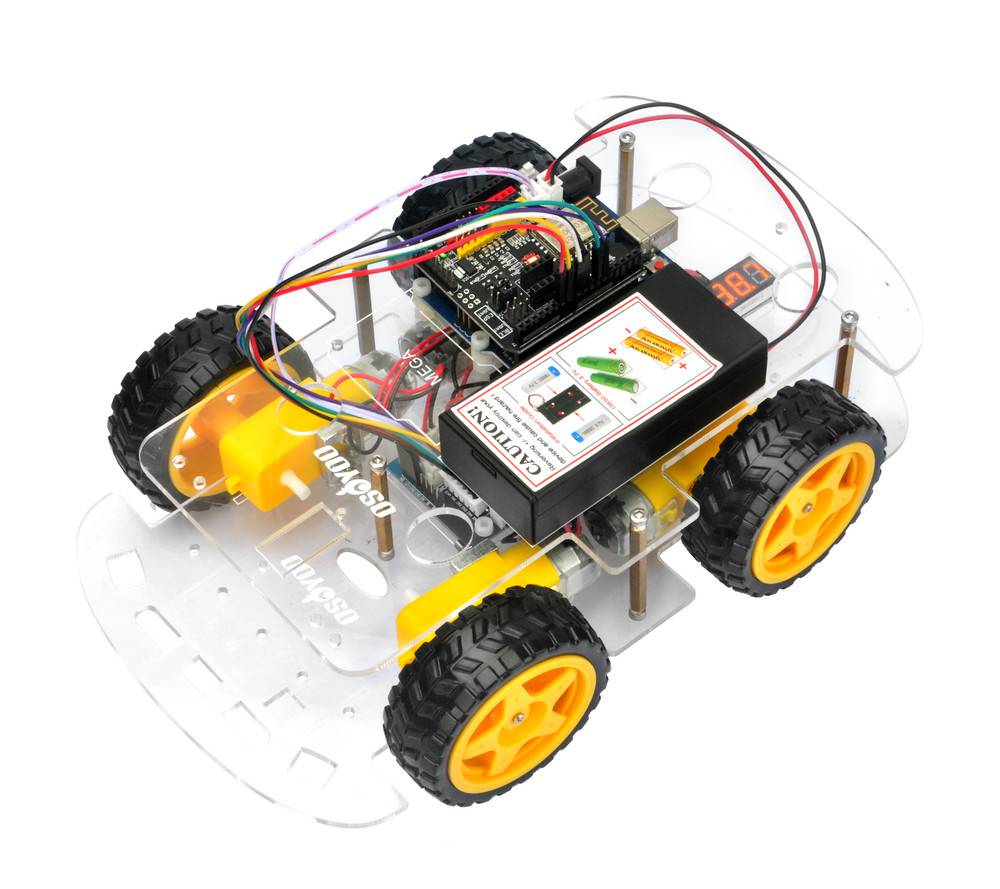
En esta lección de la versión “Hello World”, se instalará el marco de trabajo más importante en el auto robot inteligente y se programará el auto para que realice algunos movimientos simples. Si ha pasado la prueba de esta lección, significa que la placa, el medidor de voltaje, el módulo de control del motor, los motores, las baterías, el chasis y las conexiones de cables entre estas partes funcionan bien.
Como sus experimentos en lecciones futuras se basan en el marco de trabajo de la Lección Uno , es muy importante probar correctamente la instalación y el código de muestra en esta lección.
Partes y dispositivos:
No.
Imagen
Dispositivo
Cant.
Accesorios
Comprar
1
Placa base OSOYOO
1
Tornillo plástico M3 x 3
Tuerca plástico M3 x 4
Soporte plástico M3 x 4
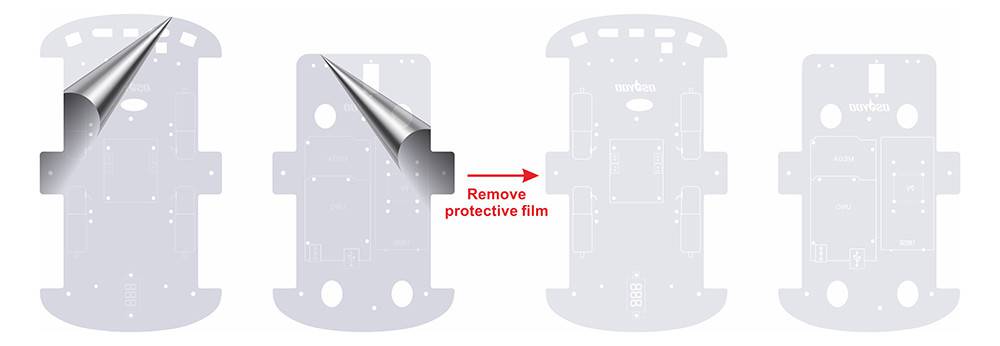
1) retire la película protectora en el chasis superior e inferior del automóvil (cada chasis del auto tiene una película protectora)
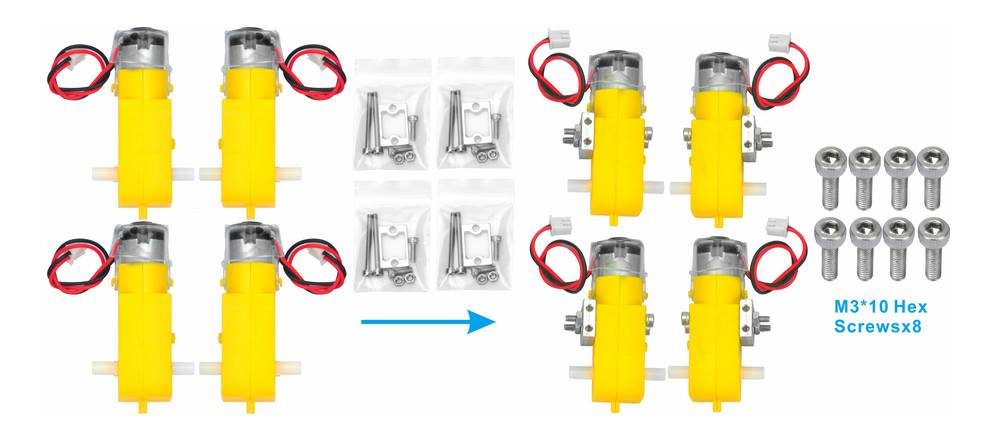
2) fije los 4 motores con los soportes metálicos para motores de la siguiente manera (compruebe la dirección del motor antes de instalar los soportes metálicos para motores)
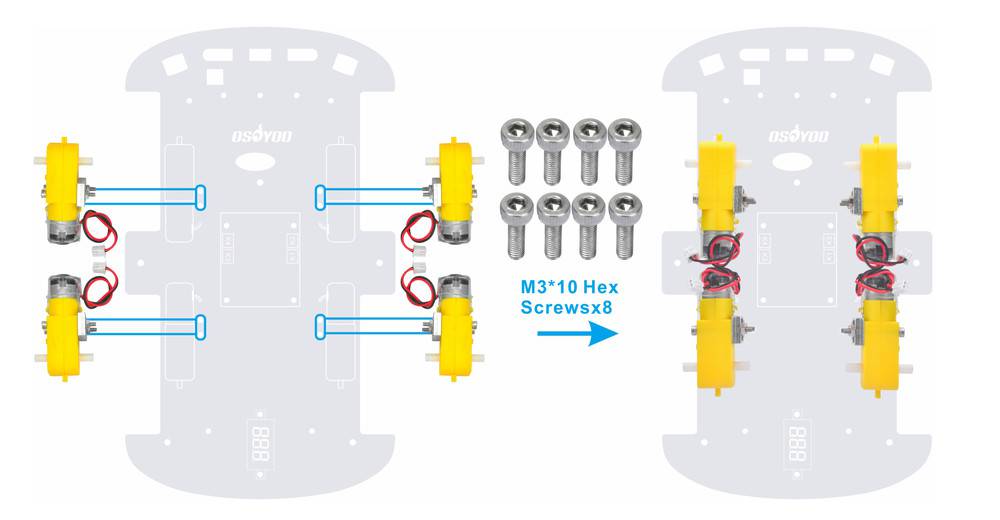
3) fije los 4 motores en el chasis inferior del auto robot con los tornillos hexagonales M3*10 mediante un destornillador hexagonal (los tornillos para este paso se encuentran en el paquete del soporte del motor de metal)
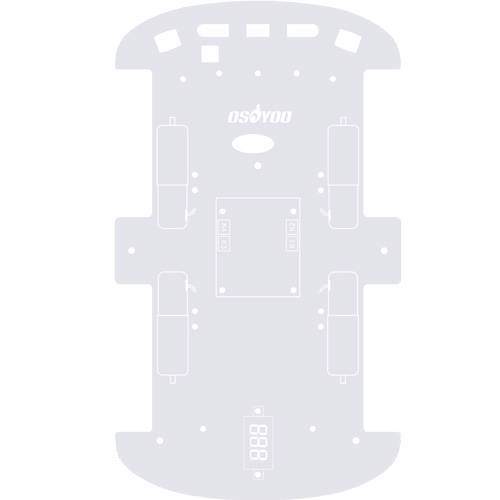
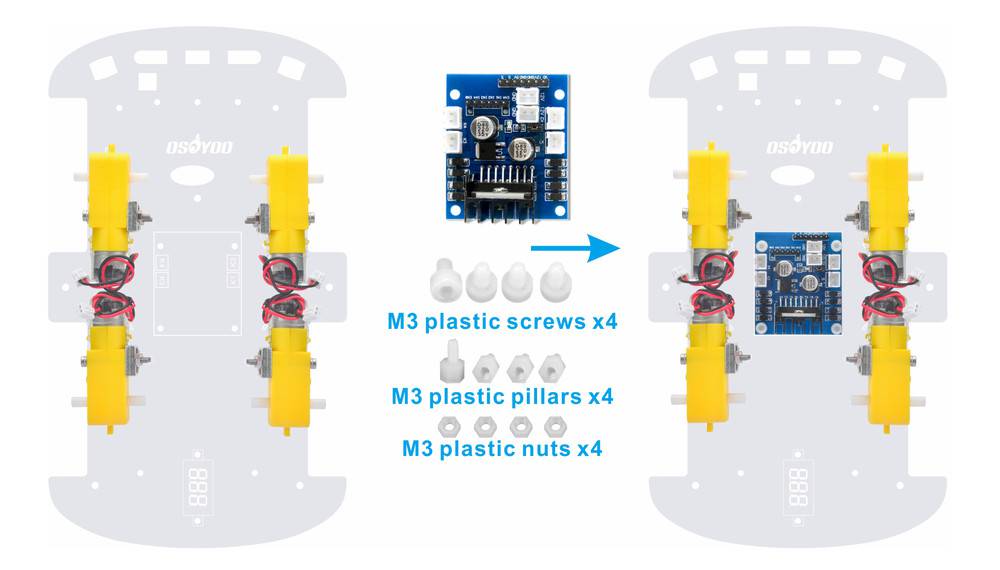
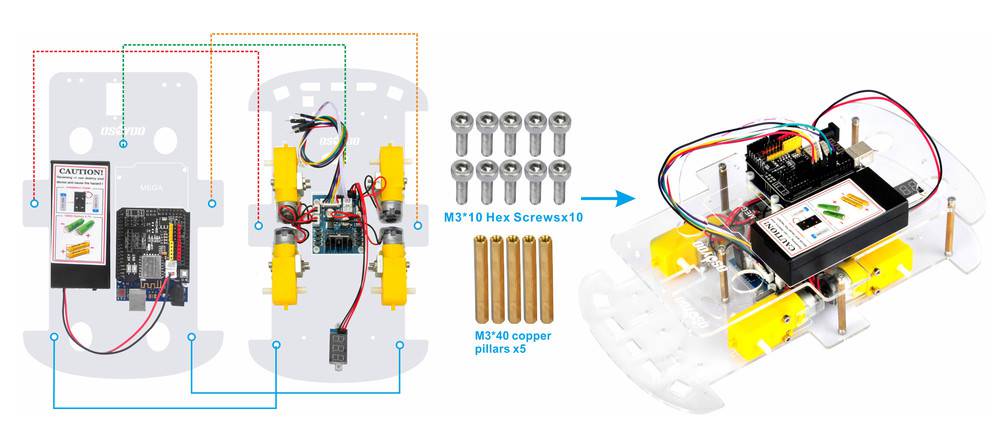
4) instale el módulo del controlador del motor OSOYOO modelo X en el chasis inferior del auto con los 4 tornillos de plástico M3, soporte de plástico y tuercas de plástico (asegúrese de instalar el módulo del controlador del motor OSOYOO modelo X en la dirección correcta).
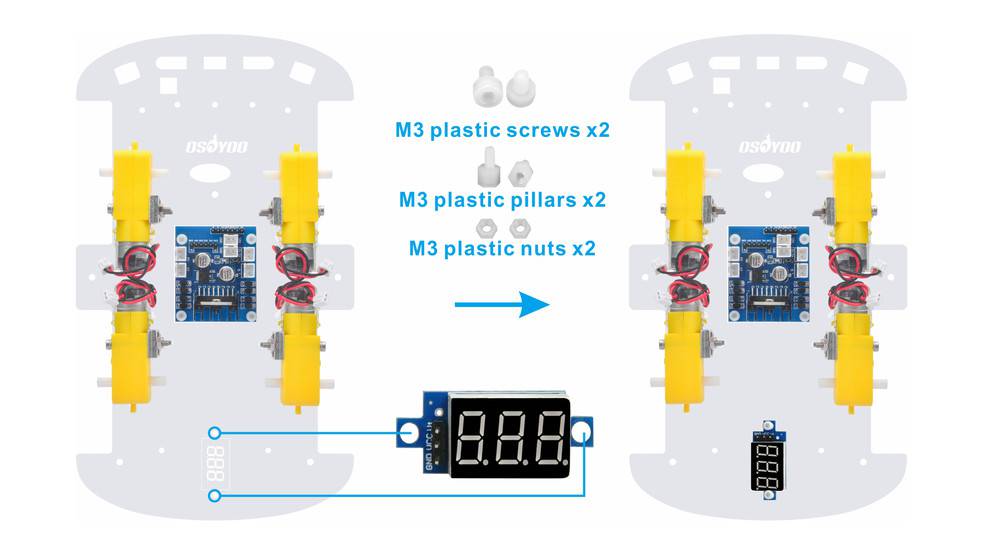
5) instale el medidor de voltaje en el chasis inferior del auto con los 2 tornillos de plástico M3, soporte de plástico y tuercas de plástico.
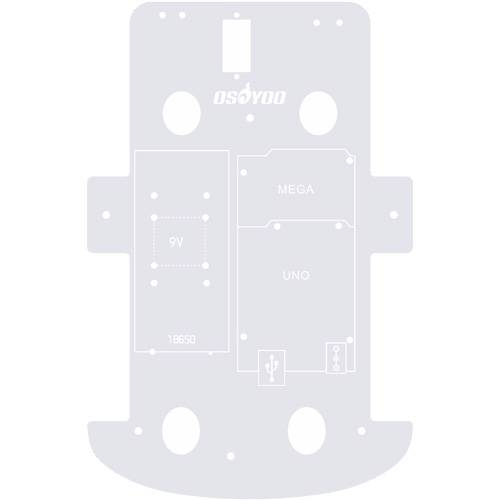
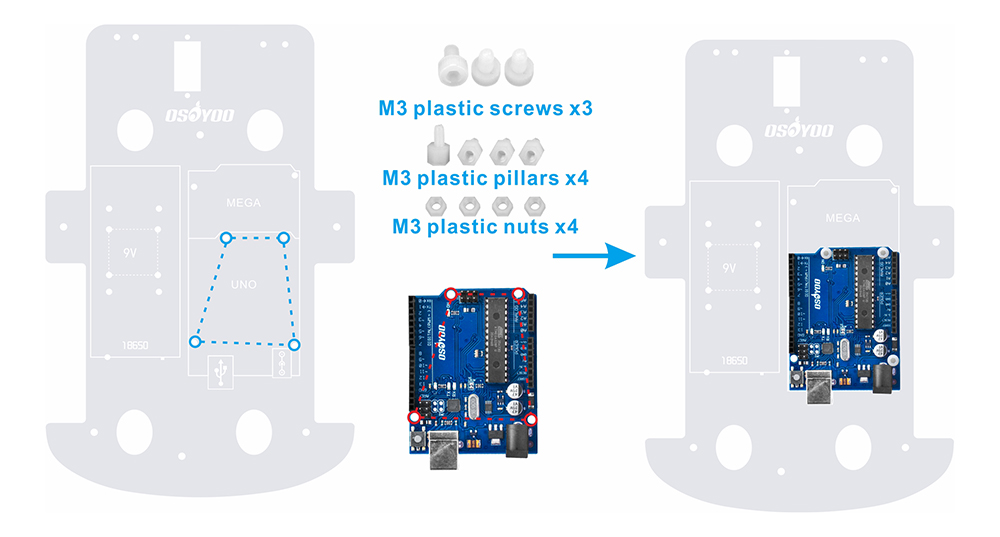
6) fije la placa básica OSOYOO en el chasis superior del auto con los 4 tornillos de plástico M3, soporte de plástico y tuercas de plástico (instale la placa en el lateral derecho que tiene la impresión).
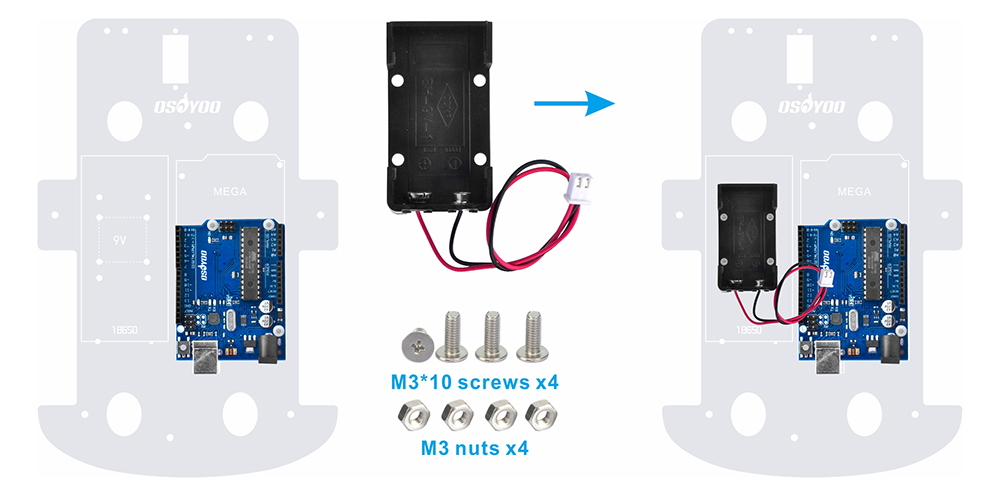
7) existen dos tipos de modelos de autos robot para que elijas comprar. Uno tiene 2 cajas de batería (caja de batería 18650 y caja de batería de 9 V) y el otro tiene 1 par de baterías 18650 y 1 cargador de batería para 18650. Recomendamos usar baterías 18650 como fuente de alimentación. Si desea utilizar una batería de 9 V como fuente de alimentación, utilice una batería recargable de 9 V. No use una batería de zinc-carbono ya que no puede proporcionar suficiente corriente para el auto robot.
A) fije la caja de batería en el chasis superior con los 4 tornillos M3 x 10 y las tuercas M3.
B) instale la caja de batería en el chasis superior con los 4 tornillos M3 x 10 y las tuercas M3 (estos son los mismos tornillos y tuercas para la caja de la batería 18650, ignore este paso si no obtiene la caja de la batería de 9 V) .
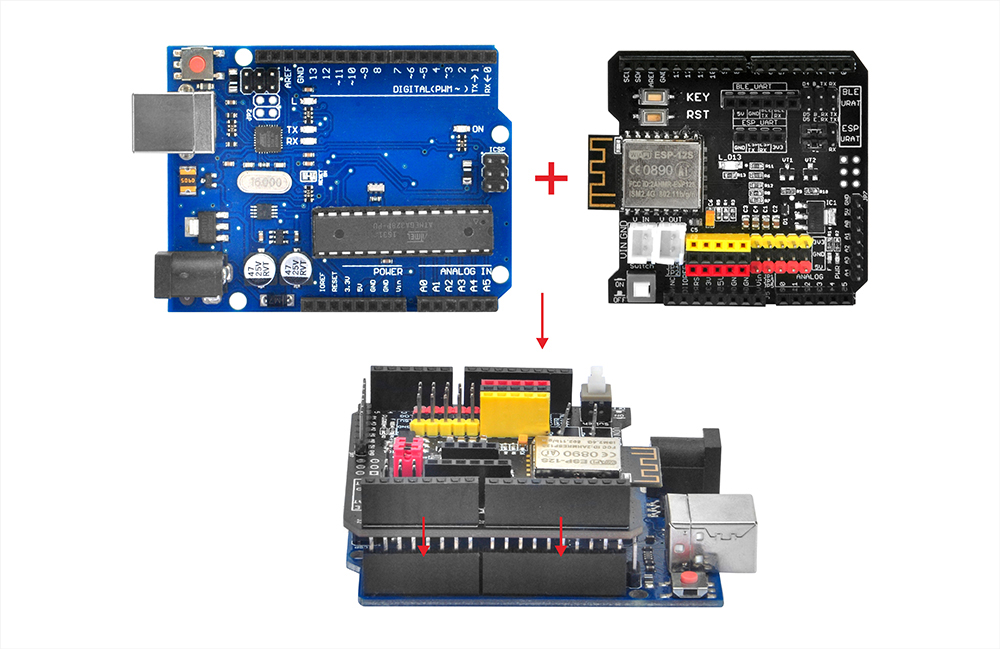
8) inserte el escudo OSOYOO Uart WIFI V1.3 en su placa
Conexiones
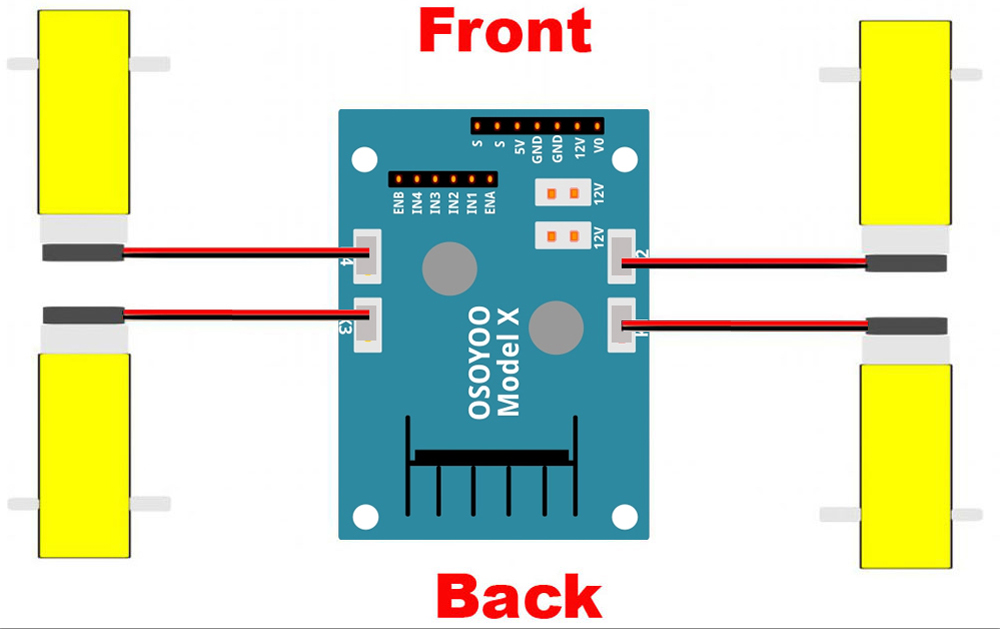
1) conecte los 4 motores al módulo del controlador OSOYOO modelo X K1 a los enchufes K4 según el siguiente gráfico:
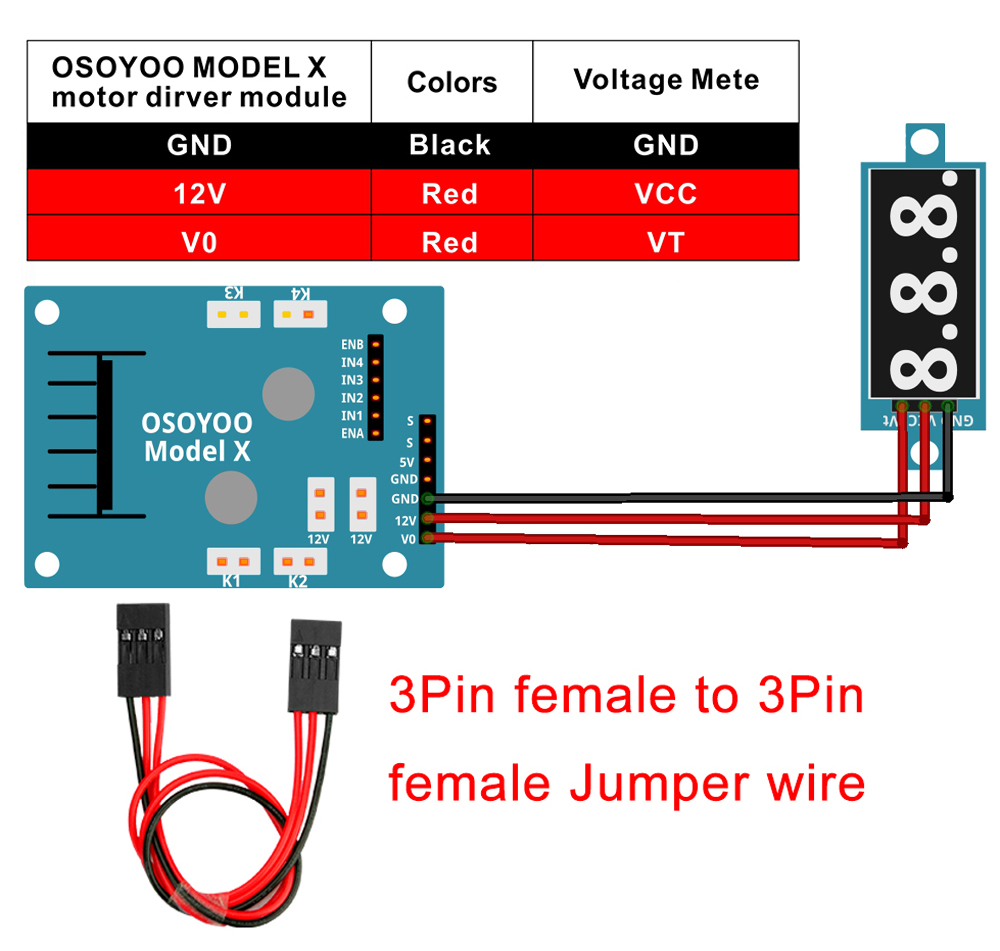
2) conecte el indicador de voltaje al módulo del controlador de motor OSOYOO modelo X con un cable de puente hembra a hembra de 3 pines como se muestra a continuación en el diagrama de conexión
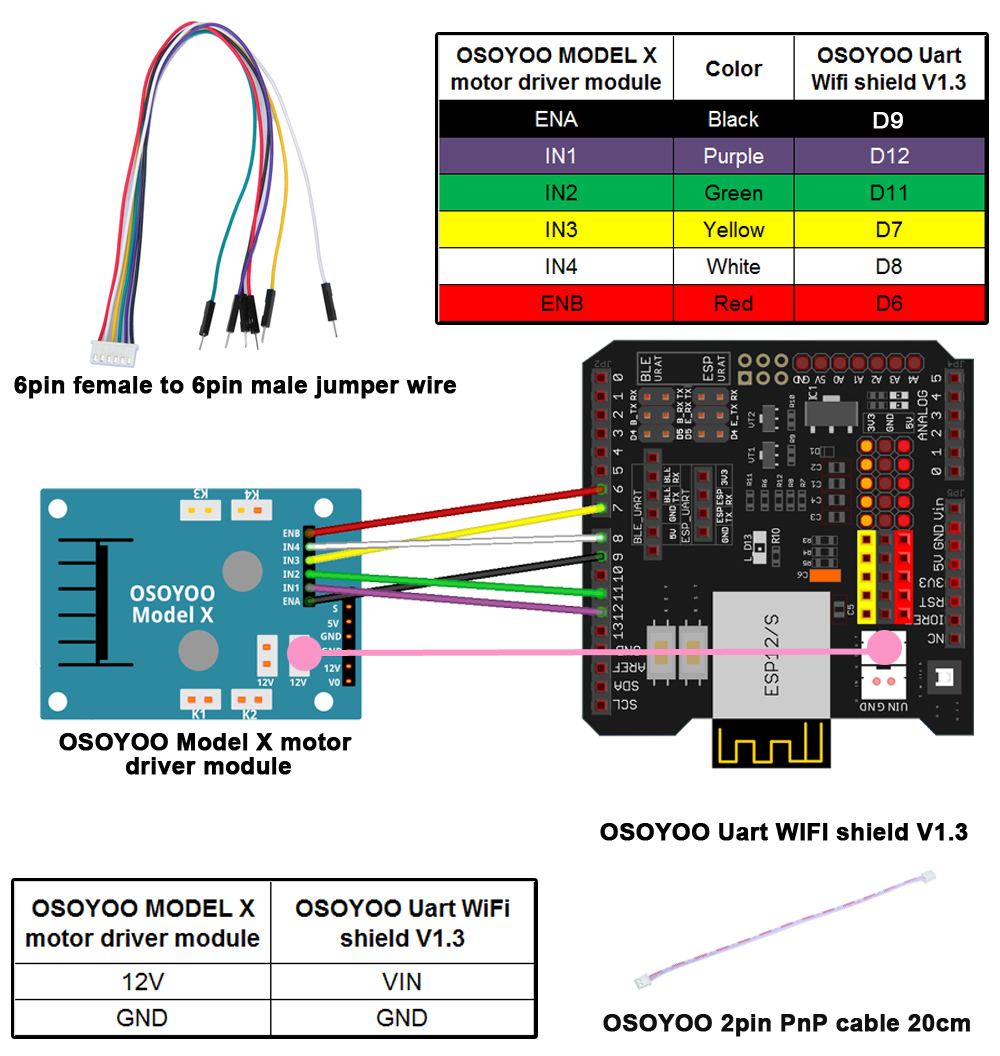
3) conecte el módulo controlador de motor OSOYOO MODEL X al escudo OSOYOO Uart WiFi V1.3 en los de 6 pines de control: D6, D7, D8, D9, D11, D12 con un cable puente macho a hembra de 6 pines a 6 pines y un enchufe 12V-GND a un enchufe VIN-GND con un cable OSOYOO PnP de 2 pines de 20 cm según el siguiente gráfico:
Precaución: Cuando inserte/retire este enchufe de 6 clavijas en el enchufe macho de 6 clavijas del OSOYOO modelo X, sujete el soporte de clavijas de plástico para realizar la operación. Nunca arrastre los cables para sacar el enchufe del tomacorriente, de lo contrario dañará los cables.
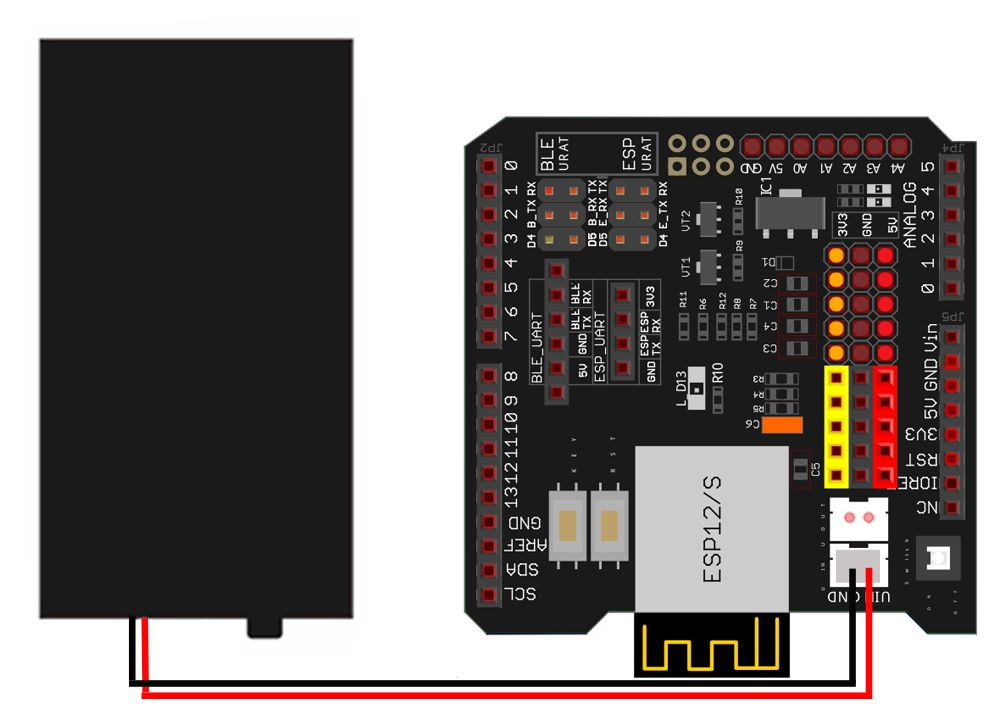
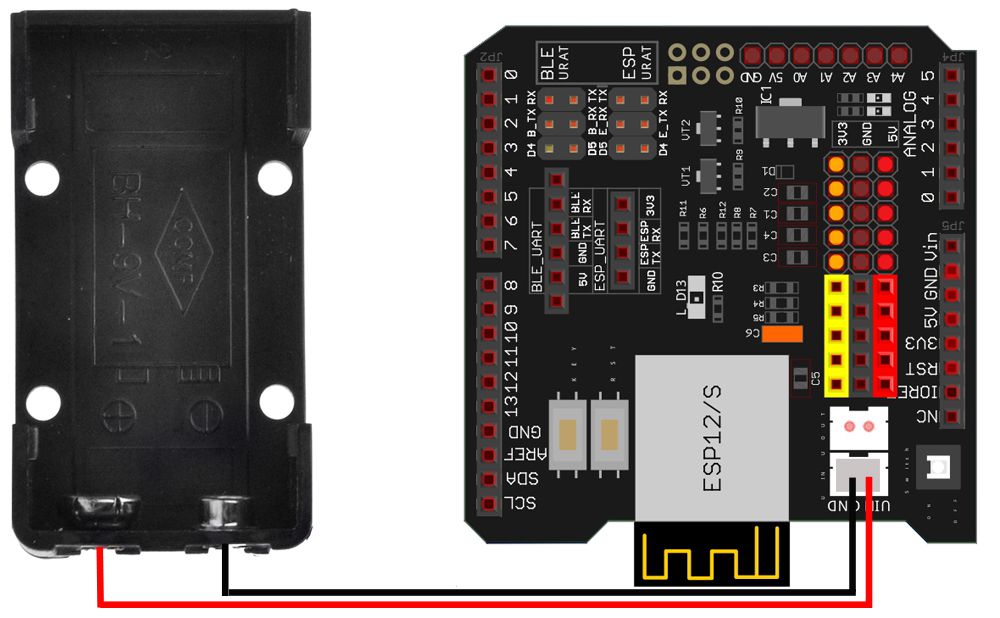
4) conecte la caja de batería (caja de batería para baterías 18650 ó para batería de 9V) al enchufe VIN-GND del escudo OSOYOO Uart WiFi V1.3 según el diagrama de conexión del siguiente gráfico:
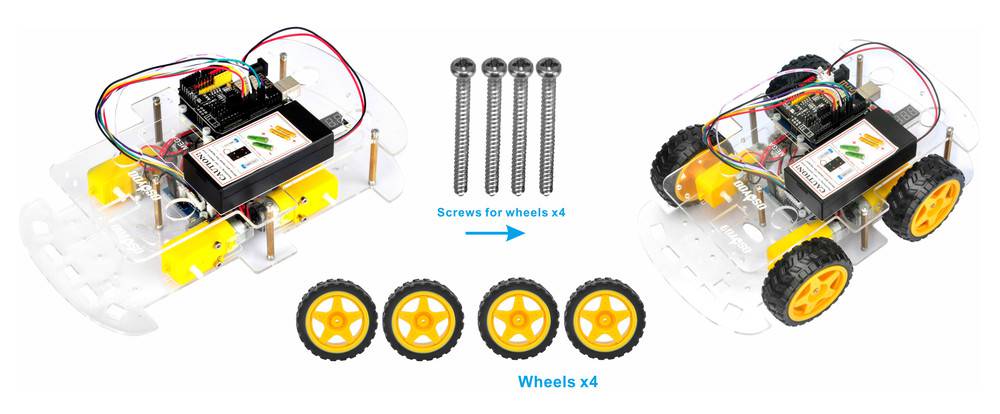
5) conecte el chasis superior al chasis inferior con cinco separadores de cobre y fije los separadores hexagonales de cobre con 10 tornillos hexagonales M3*10, luego instale las 4 ruedas en los motores (afloje los tornillos de la rueda si algunas de las ruedas no se mueven).
Ahora la instalación del hardware está casi lista. Antes de instalar las baterías 18650 en la caja, primero debemos grabar el código de muestra en la placa.
Paso 1: Instale el IDE más reciente (si tiene una versión IDE posterior a la 1.1.16, omita este paso). Descargue el IDE desde https://www.arduino.cc/en/Main/Software?setlang=en , luego instale el software.
Paso 2: descargue el código de muestra de la Lección 1 desde https://osoyoo.com/driver/v2smartcar-lesson1.zip , descomprima el archivo zip de descarga smartcar-lesson1.zip, verá una carpeta llamada v2smartcar-lesson1
Paso 3: conecte la placa a la PC con un cable USB, abra el IDE Arduino -> haga clic en archivo -> haga clic en Abrir -> elija el código “v2smartcar-lesson1.ino” en la carpeta smartcar-lesson1 y cargue el código en la placa.
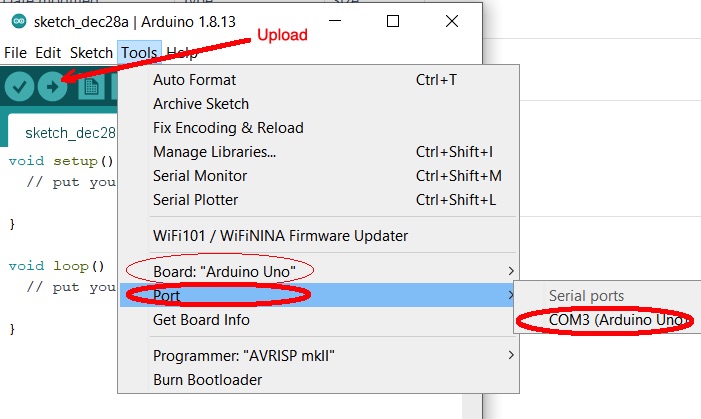
Paso 4: elija la placa/puerto correspondiente para su proyecto y cargue el código en la placa.
Pruebas:
Nota:
1) Se recomiendan las baterías 18650 ya que estas baterías pueden hacer que el auto funcione sin problemas.
2) Las baterías 18650 que usamos en las lecciones tienen alrededor de 65 mm (2,56 pulgadas) de largo, sin un circuito de protección interno.
3) Verifique las instrucciones de la caja y asegúrese de que la dirección polar sea la correcta, de lo contrario, puede destruir su dispositivo y provocar un incendio.
Instale sus baterías 18650 en la caja de baterías para 18650 según las siguientes instrucciones:
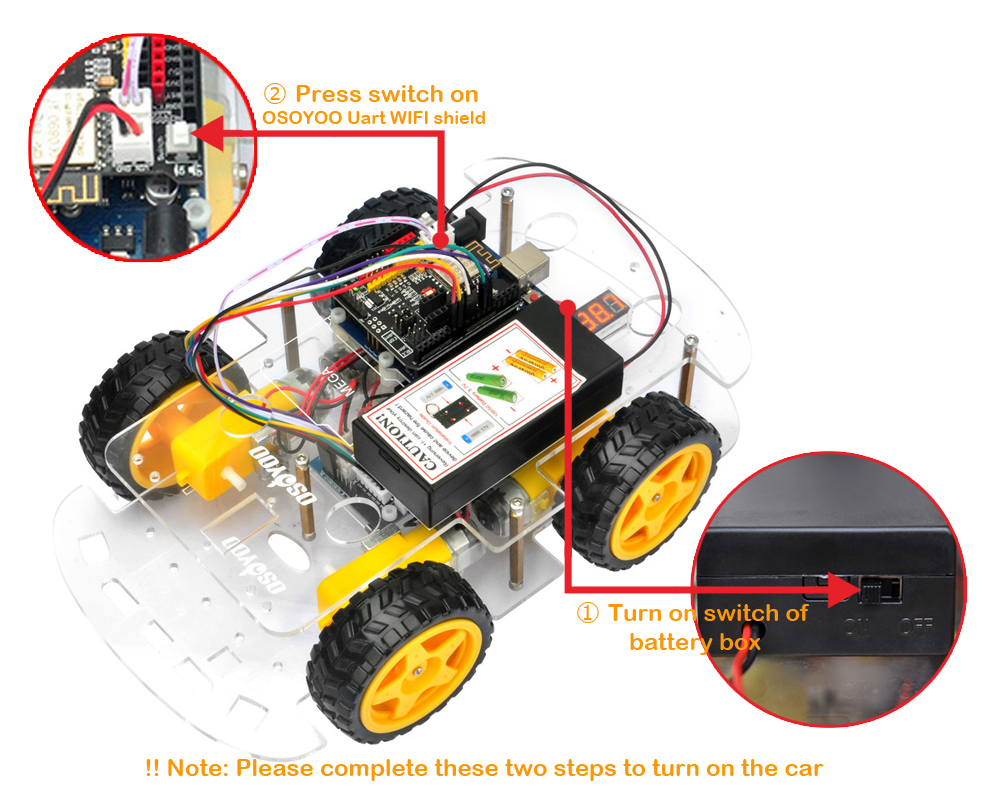
Desconecte el auto robot de la PC, coloque la batería en la caja de la batería. Cuando coloque el auto robot en el suelo y encienda el interruptor del escudo OSOYOO Uart WIFI V1.3 y el interruptor en la caja de la batería para 18650 el automóvil avanzará durante 2 segundos, luego retrocederá 2 segundos, luego girará a la izquierda durante 2 segundos, luego girará a la derecha durante 2 segundos y luego se detendrá. (Si el auto robot no se mueve según el resultado mencionado anteriormente, debe verificar la conexión de su cable y el voltaje de la batería (debe ser superior a 7.2 V).
Solución de problemas
Si, después de ejecutar el código de la Lección 1, observa que las ruedas de un lado no giran, o las ruedas de un lado solo pueden moverse hacia adelante pero no hacia atrás, o solo hacia atrás pero no hacia adelante, es probable que el problema sea un cable suelto o roto en el cable de 6 pines que conecta la placa del Modelo X.
Esta es la solución:
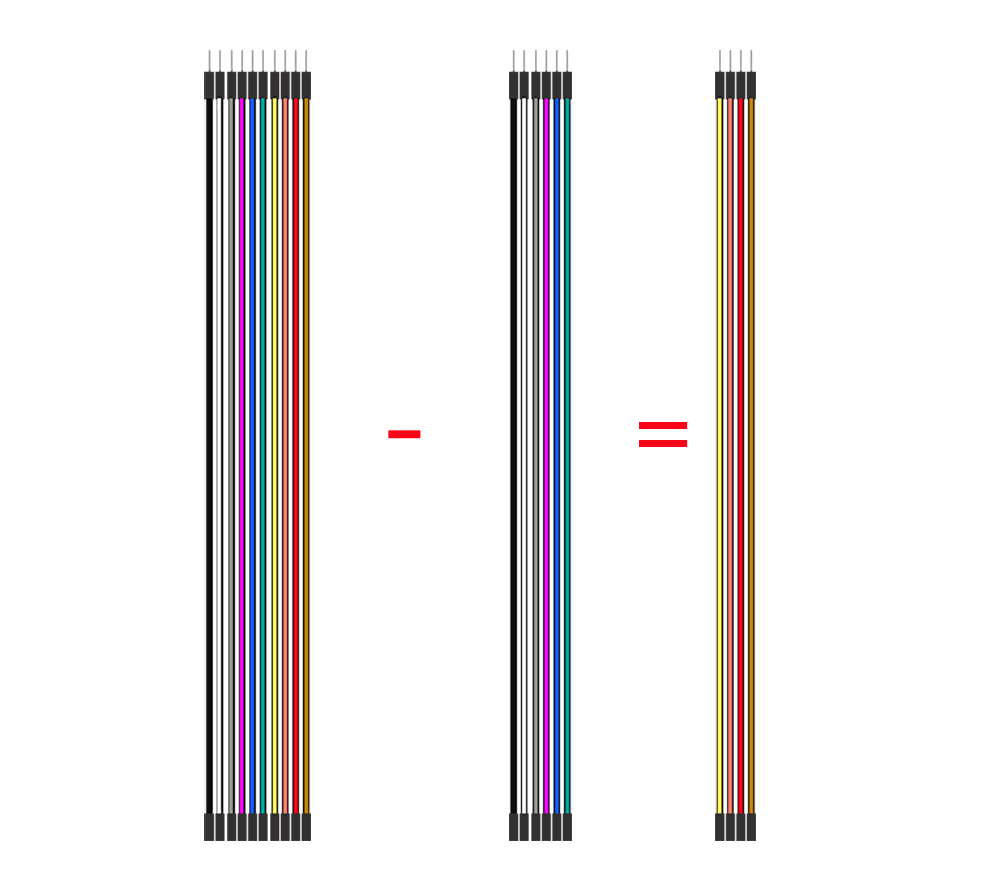
Paso 1: Desconecte el cable de 6 pines que conecta la placa Model X y la placa Arduino.
Paso 2: Busque seis (6) cables de puente hembra a macho de repuesto en su kit (cualquier color es válido).
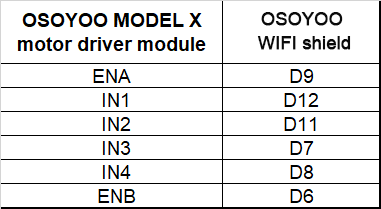
Paso 3: Utilice estos seis cables de puente para volver a conectar manualmente los pines del Model X (ENA, IN1, IN2, IN3, IN4, ENB) a los pines correspondientes del Arduino, según el mapa de cables del modelo X anterior.
Paso 4: Vuelva a probar el código de la lección 1 para ver si el problema se ha resuelto. Si el problema persiste, puede enviar los detalles del mismo a [email protected] y nuestro equipo de asistencia técnica le ayudará.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.







































Hi,
I connected everything per the tutorial and downloaded lesson 1 code, but car is not moving.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
The same is happening to me
Hi!
How can I reset from the fabric the robot car?
Thanks in advance.
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
Please paste the error and send to my email address: [email protected].
Please help me.
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
The error message generated is here..
Arduino: 1.8.19 (Windows 10), Board: “Arduino Uno”
Sketch uses 1442 bytes (4%) of program storage space. Maximum is 32256 bytes.
Global variables use 9 bytes (0%) of dynamic memory, leaving 2039 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xd4
Problem uploading to board. See https://support.arduino.cc/hc/en-us/sections/360003198300 for suggestions.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
/usr/local/bin/arduino-cli compile –fqbn arduino:avr:uno –libraries /home/builder/opt/libraries/latest –build-cache-path /tmp –output-dir /tmp/072211837/build –build-path /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167 /tmp/072211837/sketch_jul24a
Compiling sketch…
/home/builder/.arduino15/packages/arduino/tools/avr-gcc/7.3.0-atmel3.6.1-arduino7/bin/avr-g++ -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -MMD -flto -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10607 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/cores/arduino -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/variants/standard /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp -o /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp.o
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void setup()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:89:6: error: redefinition of ‘void setup()’
void setup()
^~~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:5:6: note: ‘void setup()’ previously defined here
void setup() {
^~~~~
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void loop()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:112:6: error: redefinition of ‘void loop()’
void loop(){
^~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:9:6: note: ‘void loop()’ previously defined here
void loop() {
^~~~
Error during build: exit status 1
Do you mean you can’t select coms port when you upload the code of lesson1?
Or when you select the correct coms, there is a error.
If you can’t find the coms port, please follow the video to install the driver: https://www.youtube.com/watch?v=mDrV8b1E6zI
Hi,
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
I have checked the video, and find that you have lost a 2Pin PnP cable from Wifi Uart to Model X: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson1/1.jpg. so that there is no power to Model X.
Please try it again.
Elaine
i put the code in and only 2 moters were moveing then nothing happend
Please take photos about your connection of the robot and send to my email address: [email protected]
Arduino:1.8.19 (Windows 10), Tarjeta:”Arduino Uno”
v2smartcar-lesson2:13:2: error: ‘IRrecv’ does not name a type
IRrecv IR(IR_PIN); // IRrecv object IR get code from IR remoter
^~~~~~
v2smartcar-lesson2:14:2: error: ‘decode_results’ does not name a type
decode_results IRresults;
^~~~~~~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void do_IR_Tick()’:
v2smartcar-lesson2:95:6: error: ‘IR’ was not declared in this scope
if(IR.decode(&IRresults))
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:95:6: note: suggested alternative: ‘ISR’
if(IR.decode(&IRresults))
^~
ISR
v2smartcar-lesson2:95:17: error: ‘IRresults’ was not declared in this scope
if(IR.decode(&IRresults))
^~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void setup()’:
v2smartcar-lesson2:168:3: error: ‘IR’ was not declared in this scope
IR.enableIRIn();
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:168:3: note: suggested alternative: ‘ISR’
IR.enableIRIn();
^~
ISR
exit status 1
‘IRrecv’ does not name a type
Este informe podría contener más información con
“Mostrar salida detallada durante la compilación”
opción habilitada en Archivo -> Preferencias.
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
What is the set_Motorspeed used for in the arduino code?
Why is the car humming when I turn it on?
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
I’ve sent you the email about that.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
Please change the wires from Model X to Wifi shield. If the issue occurs again, please contact with my email: [email protected]
Hi,
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
I checked wire connection OK
I check PINS OK
Any idea please ?
Thanks a lot
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
Hi, how much weight can it hold/carry?
This is an acrylic robot car for learning how to use Arduino to code. If you want to a robot to carry heavy weight, please visit our product: https://osoyoo.com/2022/07/05/v2-metal-chassis-mecanum-wheel-robotic-for-arduino-mega2560-introduction-model-2021006600/
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.