Usted puede bajar el manual del usuario desde:
Nota: TODOS los Productos OSOYOO para Arduino son placas de Terceros que son totalmente compatibles con Arduino
Contenidos:
Comercios autorizados en línea:
| Comprar desde US |
Comprar desde UK |
Comprar desde DE |
Comprar desde IT |
Comprar desde FR |
Comprar desde ES |
Comprar desde JP |
 |
 |
 |
 |
 |
 |
 |
Descripción:
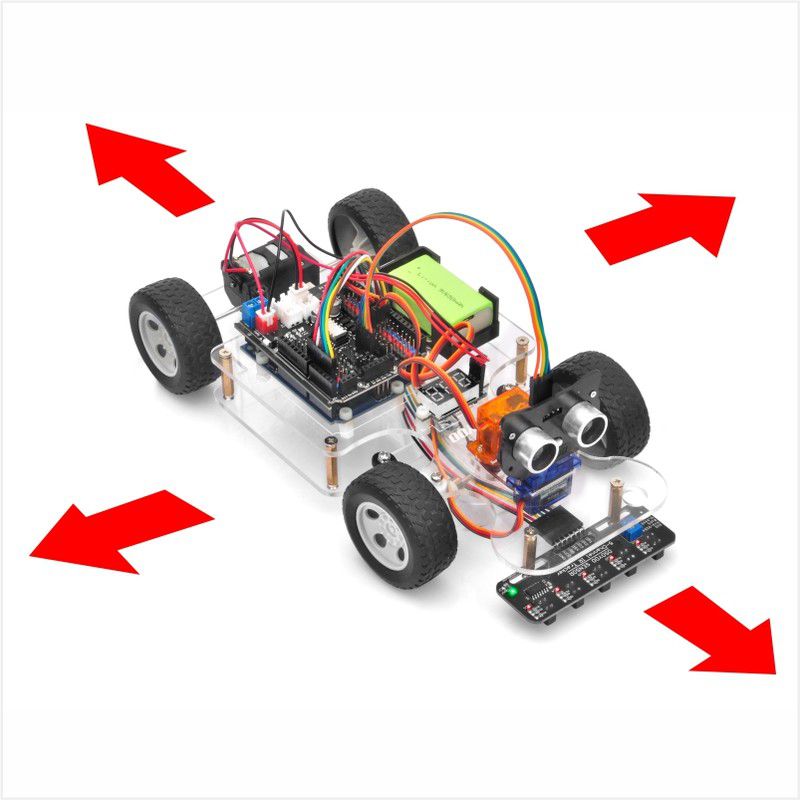
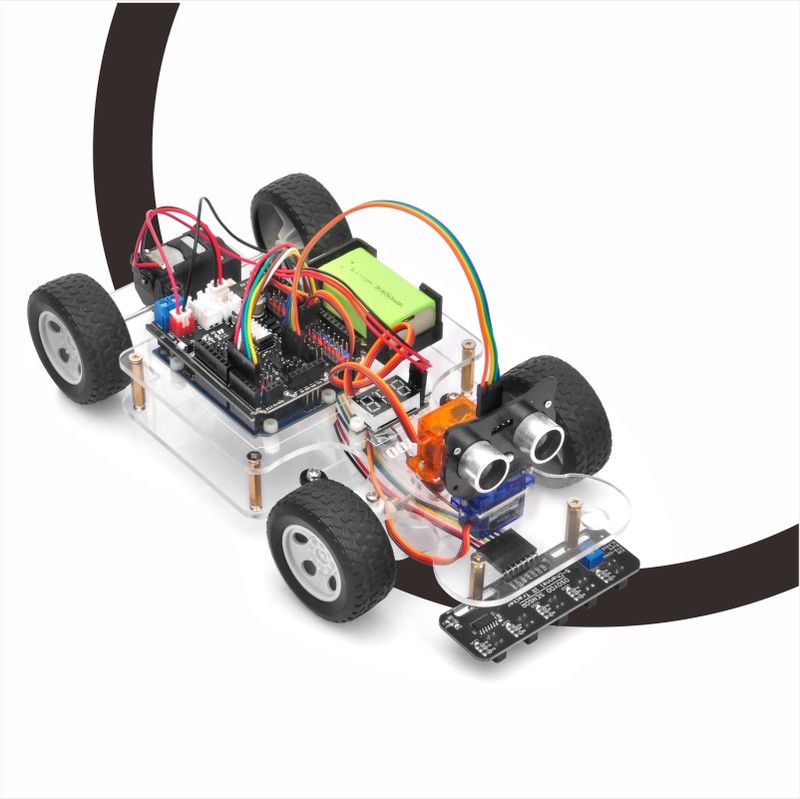
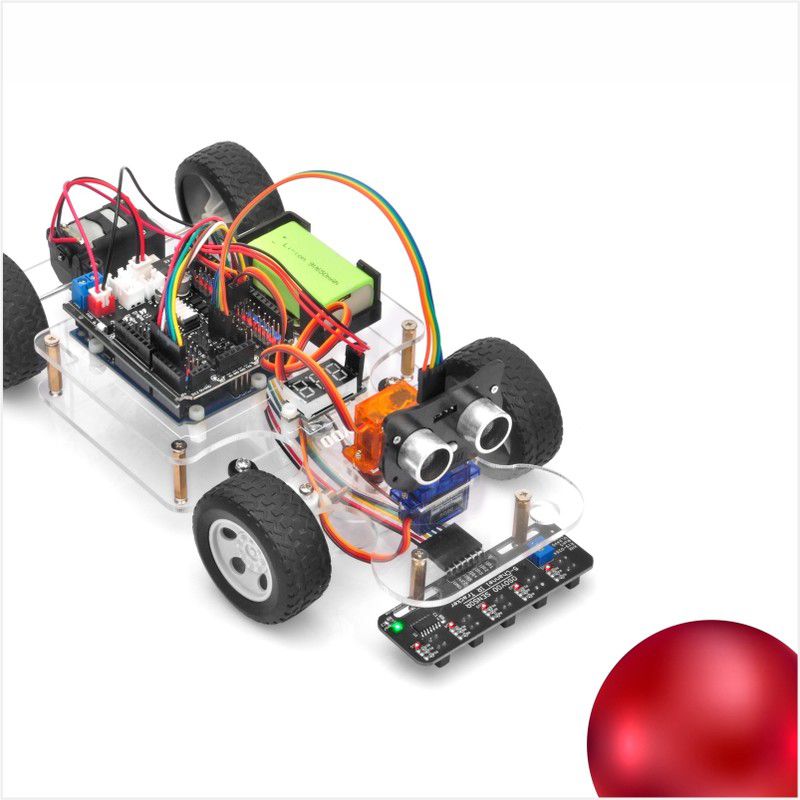
El Kit de Auto Deportivo OSOYOO para Arduino utiliza una cremallera de dirección tipo servo fácil de instalar para reemplazar la antigua dirección diferencial utilizada por la mayoría de los Robots Arduino en el mercado. Esta cremallera de dirección tipo servo funciona de manera bastante similar al sistema mecánico de dirección de un automóvil real y, por lo tanto, tiene un mejor rendimiento.
El Kit Robot OSOYOO Auto Deportivo para Arduino es un Kit STEM educativo para obtener experiencia práctica sobre programación, ensamblaje de componentes electrónicos y conocimientos de mecánica de Robots. Es una solución de integración para el aprendizaje de la robótica y está hecho para la educación.
El Kit OSOYOO Auto Deportivo para Arduino es un Kit educativo y divertido basado en la placa OSOYOO R3 MCU (compatible con Arduino) diseñado tanto para principiantes como para profesionales para aprender electrónica, programación y robótica. Con nuestro tutorial fácil de seguir, ensamblar este Kit de robot sería muy intuitivo y simple, independientemente de si es un ingeniero o un novato. Construir tu propio proyecto robótico nunca ha sido tan fácil y divertido. Sólo tienes que seguir nuestro tutorial y, paso a paso, tendrás tu propio Kit de auto en marcha en poco tiempo.
Este Kit le permite pasar un buen rato con sus hijos y les permite desarrollar e inspirar su imaginación. Si sus hijos, familiares o amigos se sienten atraídos por el mundo de la electrónica y la robótica, este Kit sería una excelente opción y un regalo perfecto para que comiencen su primer paso en el viaje electrónico.

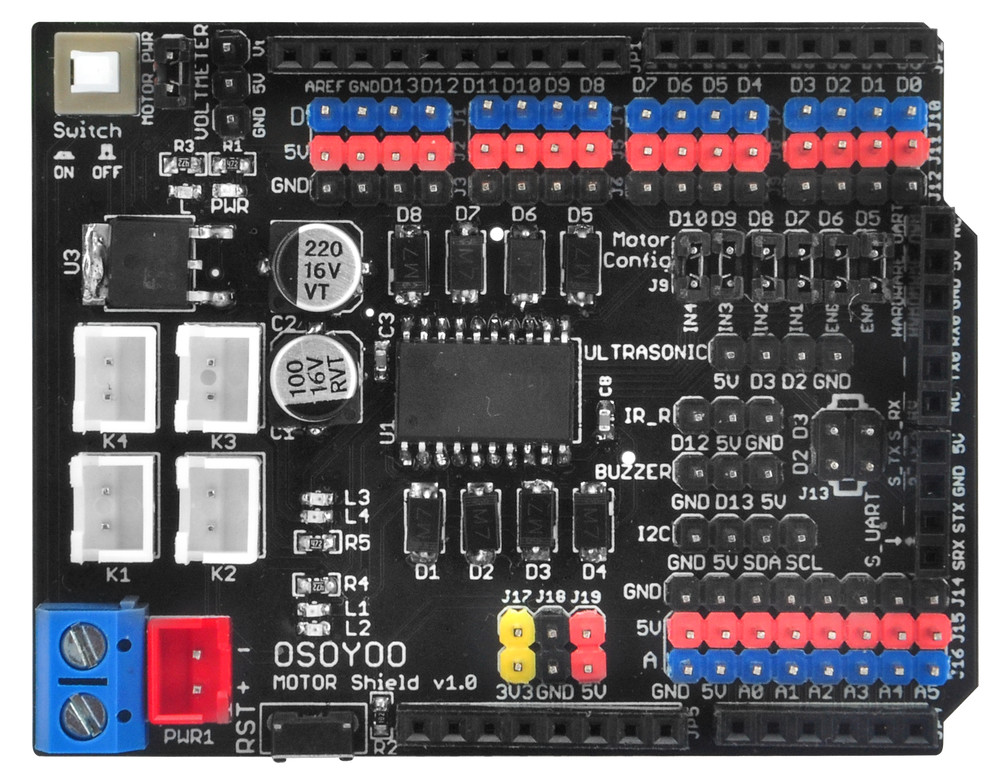
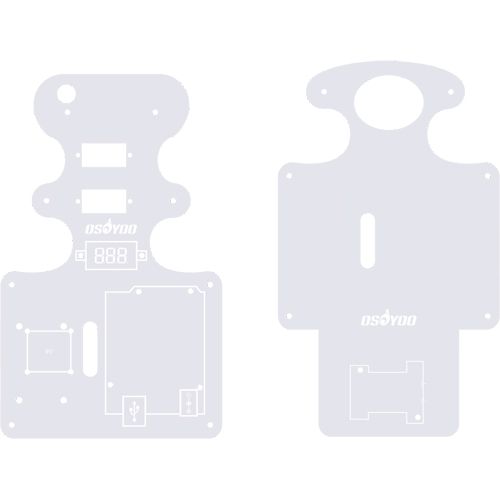
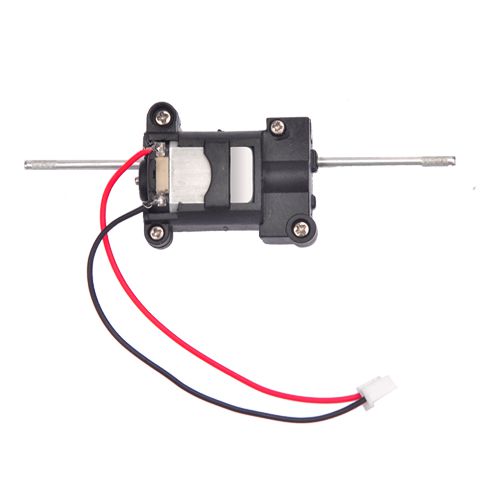
Piezas y dispositivos:
Tutorial y proyectos de ejemplos:






























having bought and assembled this car about two weeks ago I’m puzzled to find this car slowing down (almost stopping) when turning left (bluetooth) and the voltage meter reading going from 9.0 to 3.something. This also holds true when putting the device on a stand und letting the whells run freely. II’ve checked the wiring and mechanical setup multiple times and couldn’t find any issue. On turning to the right everythings works fine as well as going forward.
Do you have any suggestions what may be the cause for that behavior and how to remedy that?
With Kind Regards
Jochen Seidel
hi, Jochen,
When your car make left turn, make sure the front wheel is not stuck by the chassis. Sometimes improper installation of the front steering system might cause wheels touching the chassis when making left turn(or right turn). In such cases, the car will consume huge current to overcome the resistance. The voltage will reduce sharply when current is increasing.
If you found that the front left wheel is touching any part of chassis during left turn, you have two solutions:
1) Adjust the screws of the steering system, don’t let the front wheel to touch chassis at any time.
2)Change the code, reduce the left turn angle. For example , original left turn and Sharp_left angles are defined as following:
int LEFT=FRONT-25;
int SHARP_LEFT=FRONT-35;
Please change above value to:
int LEFT=FRONT-20;
int SHARP_LEFT=FRONT-30;
Above code change will reduce the Left turn angle by 5 degree. If the the wheel still touches chassis when left turn, you can change the -20 to -15 and -30 to -25 , then try again.
Hope this helps.
Thank you very much for providing such detailed insights! I will certainly share this invaluable information with my colleagues and peers, as I believe they will greatly benefit from your expertise.