La rueda de dirección Mecanum Omni modelo 2021006600 es una rueda muy interesante que permite que el auto Robot realice un movimiento omnidireccional (por ejemplo, desplazamiento paralelo hacia la izquierda y hacia la derecha).
En este proyecto, mostraremos cómo usar Arduino para controlar un auto Robot con ruedas Mecanum de la marca OSOYOO para realizar algunos movimientos básicos: avanzar, retroceder, girar a la izquierda, girar a la derecha, girar en paralelo a la izquierda, girar en paralelo a la derecha, etc
Esta lección también muestra cómo instalar el chasis de este Robot y conectar los cables de señal de control de Arduino a la placa del modelo Y. Esta instalación será el punto de partida de nuestras próximas lecciones.
Descargar tutoriales en PDF: https://osoyoo.com/manual/2021006600.pdf
Video de instalacion del coche robot OSOYOO: https://osoyoo.com/manual/2021006600.html
Chasis de automóvil robótico con ruedas mecanum OSOYOO x1
Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 / ruedas derechas x2)
Placa OSOYOO Mega2560 totalmente compatible con Arduino UNO/Mega2560 x1
Escudo OSOYOO Uart WIFI x1
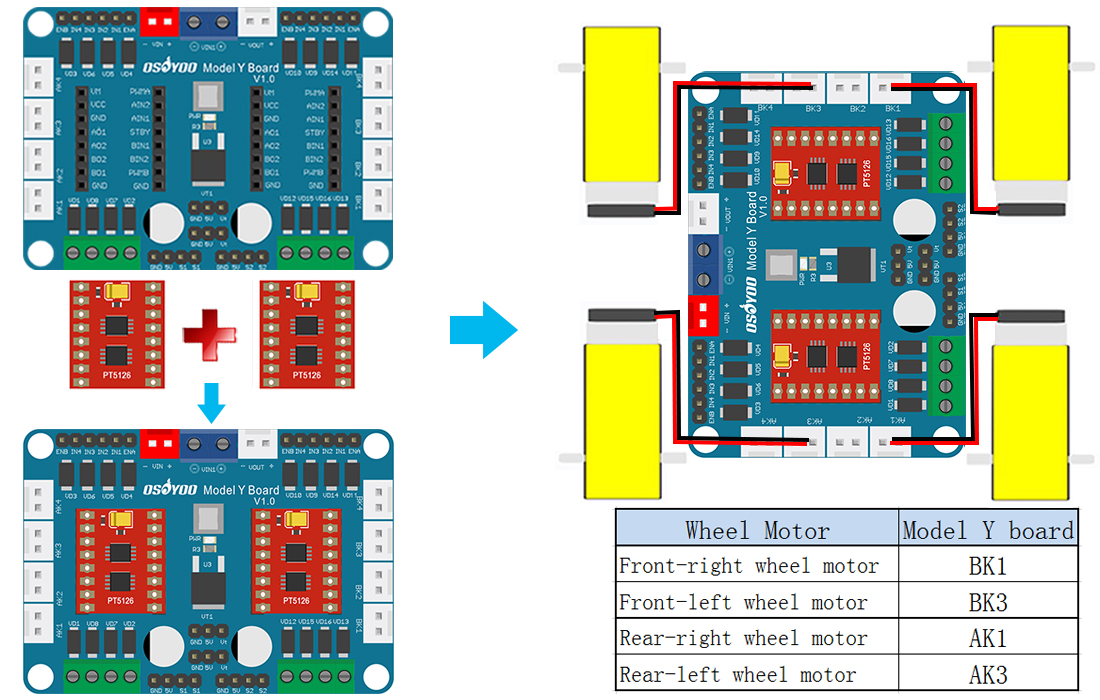
Placa controladora de motor modelo Y de OSOYOO
(integrada con dos unidades de controlador de puente en H TB6612 que pueden controlar 4 canales separados y 8 puertos de salida PWM)
Medidor de voltaje OSOYOO x1
Caja de batería OSOYOO x1
Cable puente macho a hembra de 6 pines de OSOYOO x2
Cable puente hembra a hembra de 3 pines de OSOYOO x1
Conector hembra a hembra de 2 pines PnP de OSOYOO x1
Baterías 18650 (3.7V) x2
Cargador de batería x1
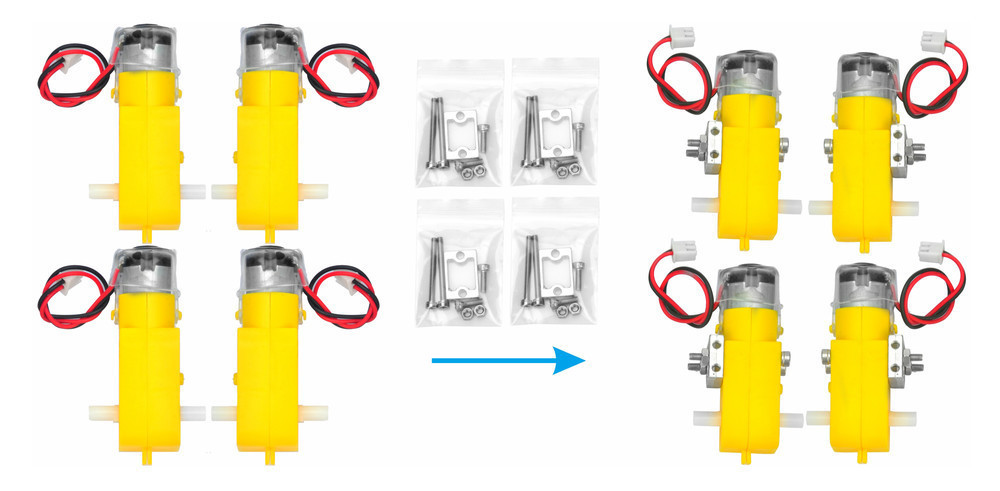
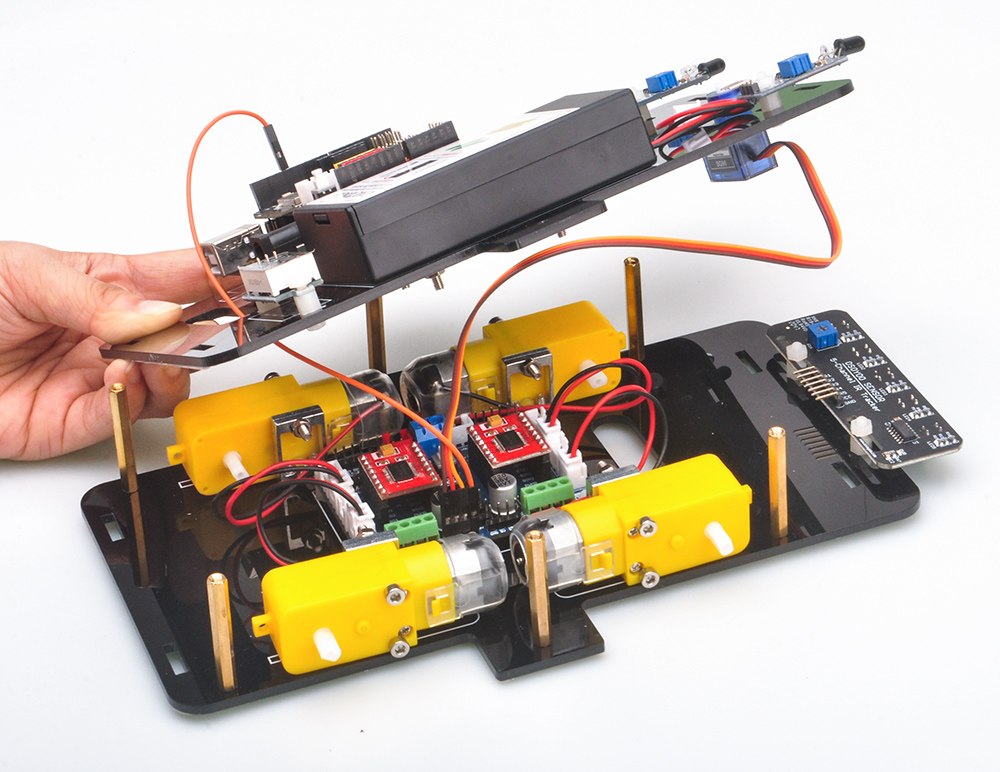
1) Fije los 4 motores con los soportes metálicos para motores de la siguiente manera : (compruebe la dirección del motor antes de instalar los soportes metálicos del motor)
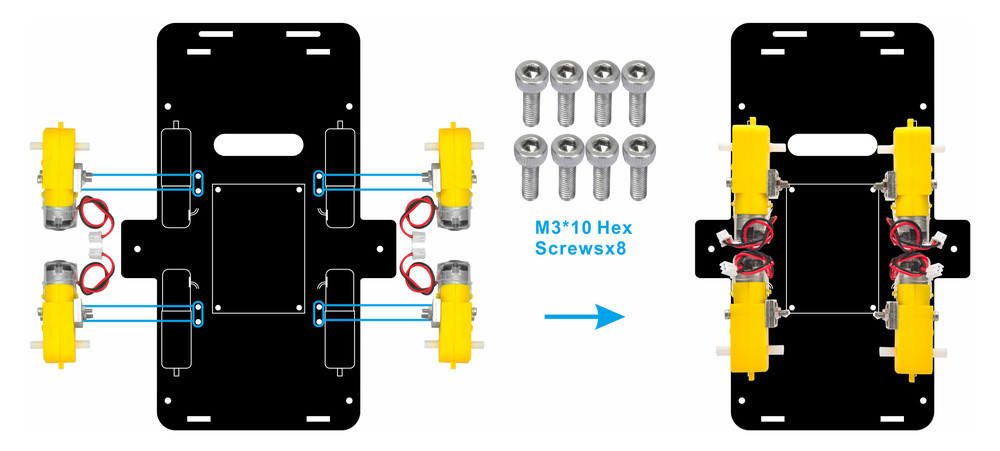
2) Fije los 4 motores en el chasis inferior del Robot con tornillos hexagonales M3*10 mediante un destornillador hexagonal (los tornillos para este paso se encuentran en el paquete del soporte del motor de metal).
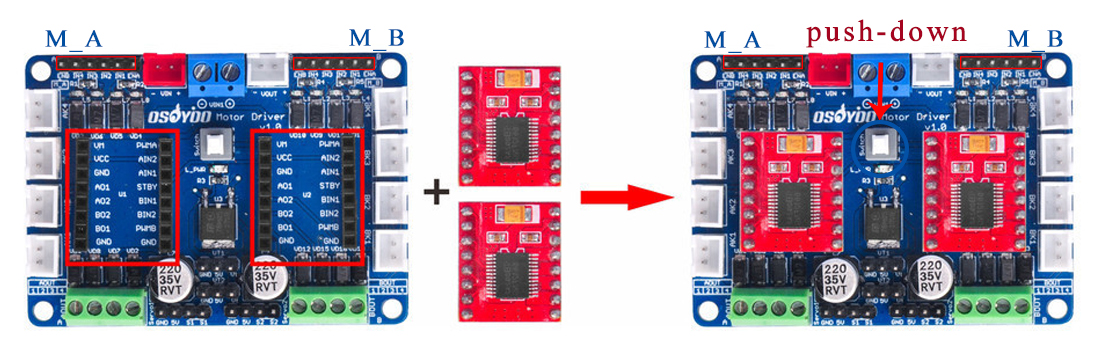
3) Inserte el módulo TB6612 en la placa del controlador OSOYOO modelo Y.
Nota: El botón blanco tiene dos estados, PUSH-DOWN y POP-UP y asegúrese de que el botón esté en la posición PUSH-DOWN.
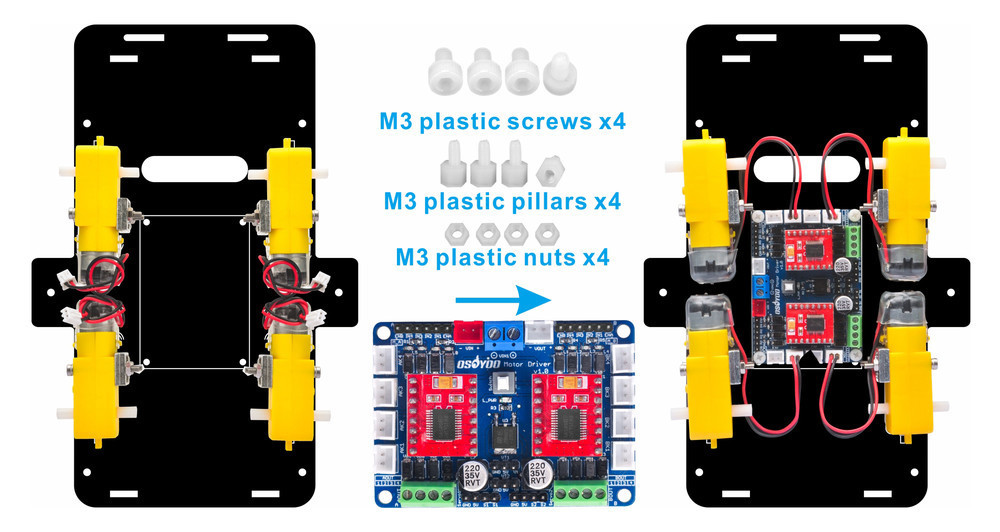
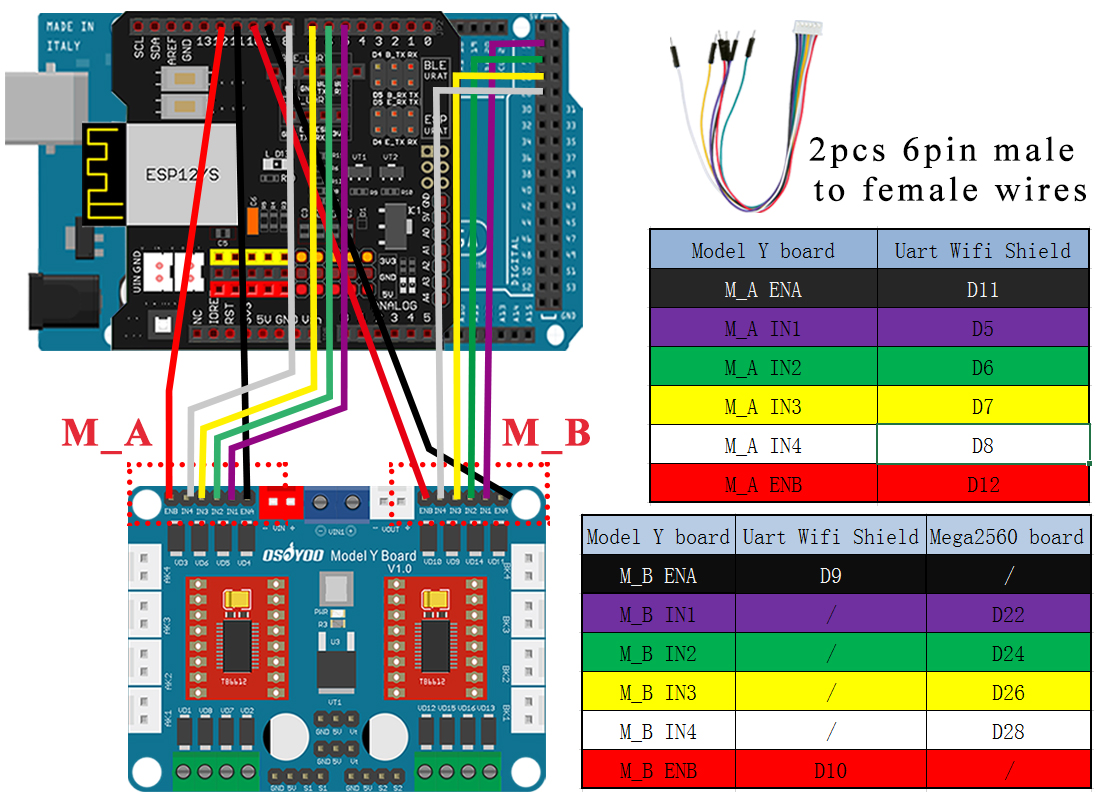
4) Instale la placa del controlador OSOYOO modelo Y en el chasis inferior del automóvil con los 4 tornillos de plástico M3, los pilares de plástico y tuercas de plástico. Conecte los 4 motores a los enchufes K1 y K3 de la placa controladora del motor modelo Y según el siguiente gráfico. (Asegúrese de instalar la placa del controlador OSOYOO MODEL Y en la dirección correcta).
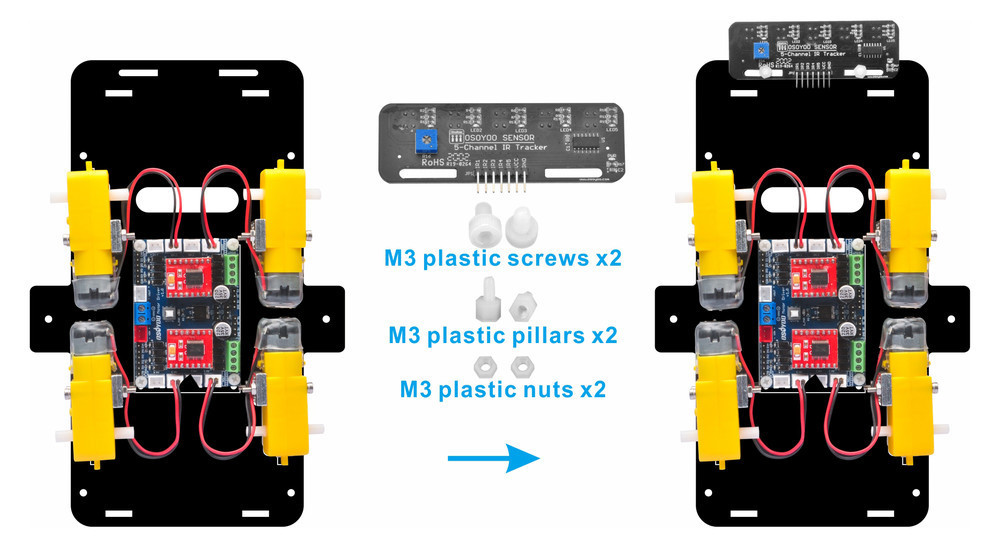
5) Instale los módulos del sensor de seguimiento en el chasis inferior del robot con los 2 tornillos de plástico M3, los pilares de plástico M3 y las tuercas de plástico M3.
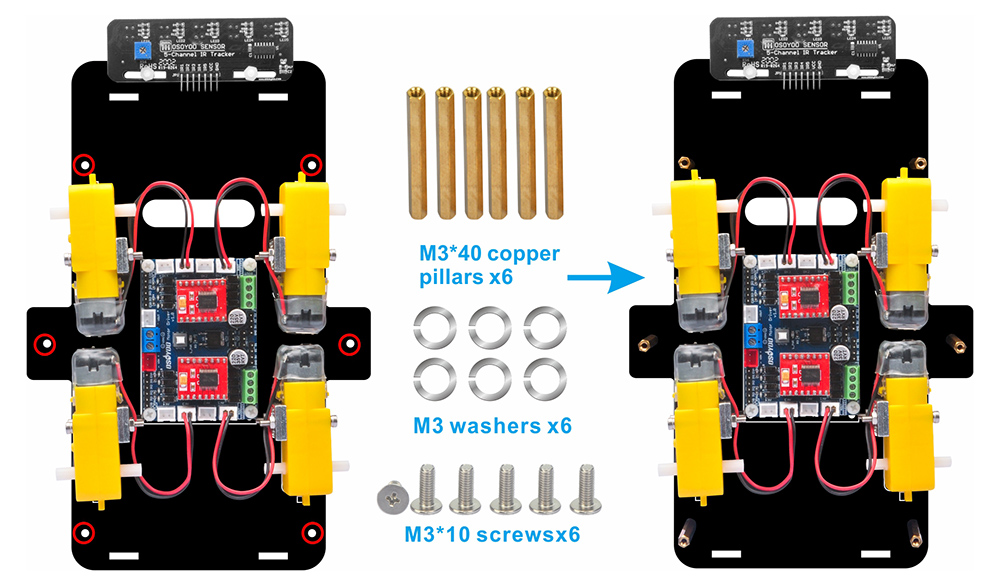
6) Fije los pilares de cobre con 6 tornillos M3*10 y las 6 arandelas en el chasis inferior.
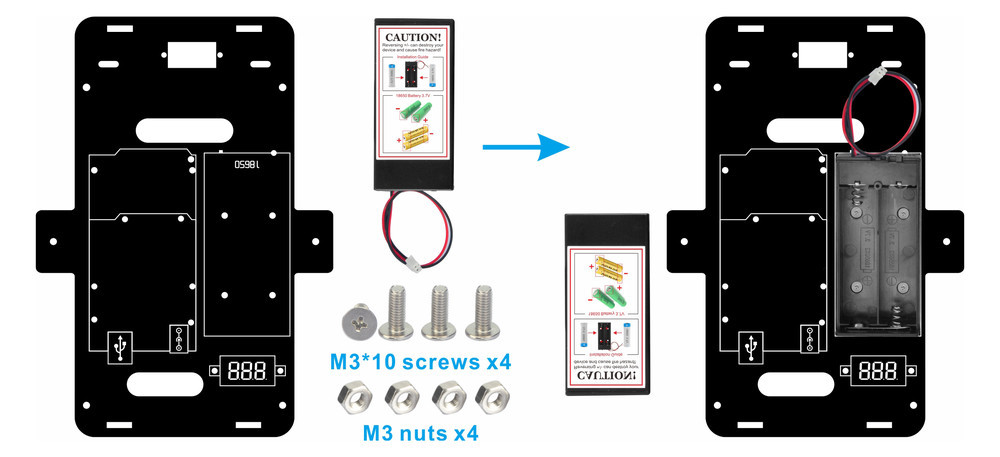
7) Fije esta caja de batería en el chasis superior con los 4 tornillos M3 x 10 y las tuercas M3.
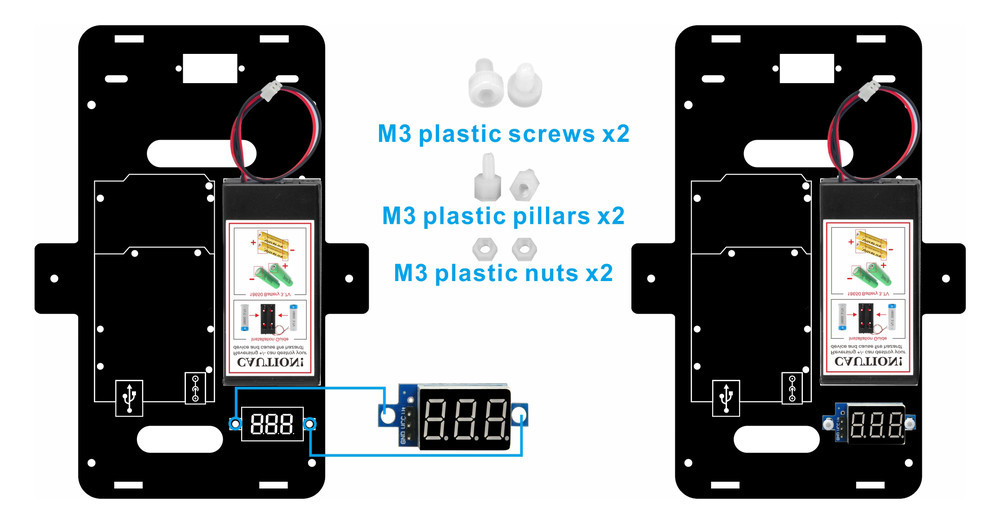
8) Instale el medidor de voltaje en el chasis inferior del robot con los 2 tornillos de plástico M3, los pilares de plástico y las tuercas de plástico.
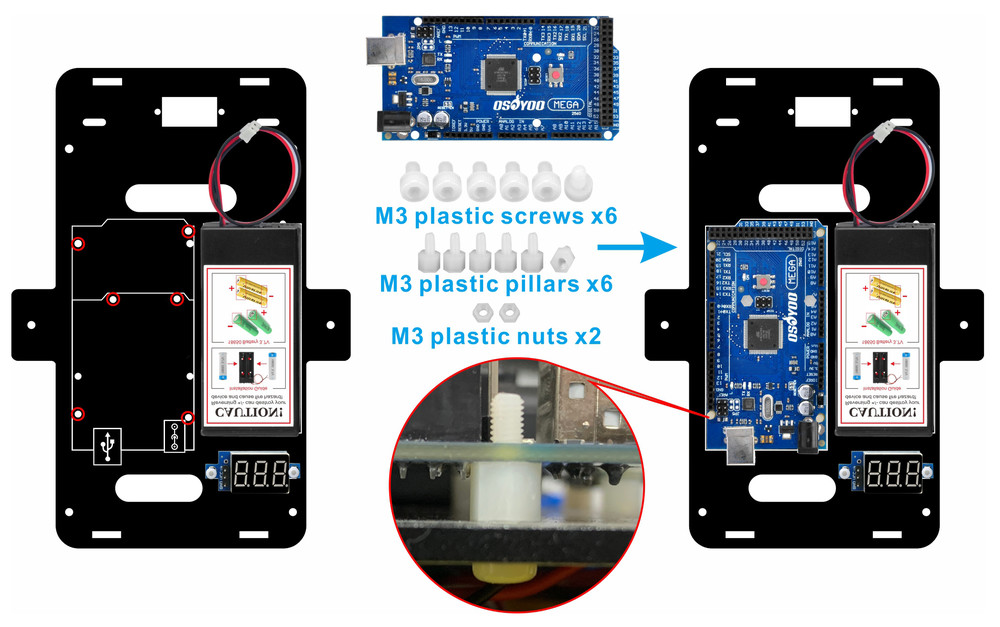
9) Fije la placa OSOYOO Mega2560 en el chasis superior del robot con los 6 tornillos de plástico M3, los 6 pilares de plástico y las 2 tuercas de plástico (ajuste la placa Mega2560 en el lateral de la impresión).
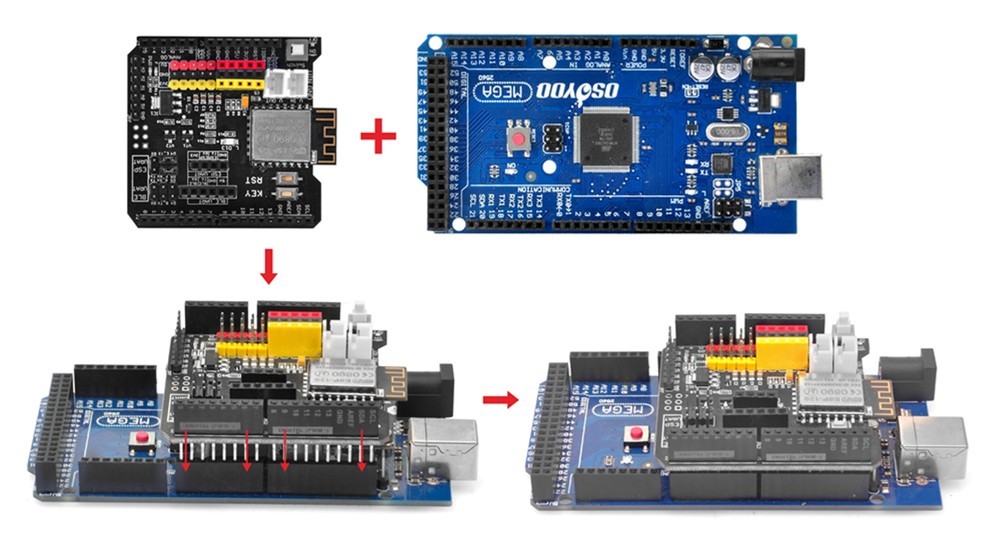
Inserte el escudo OSOYOO Uart WiFi en su placa Mega2560.
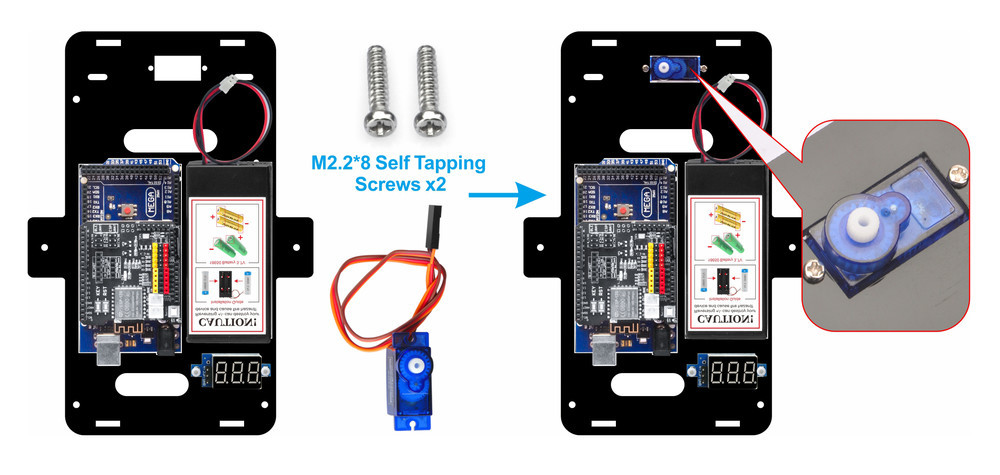
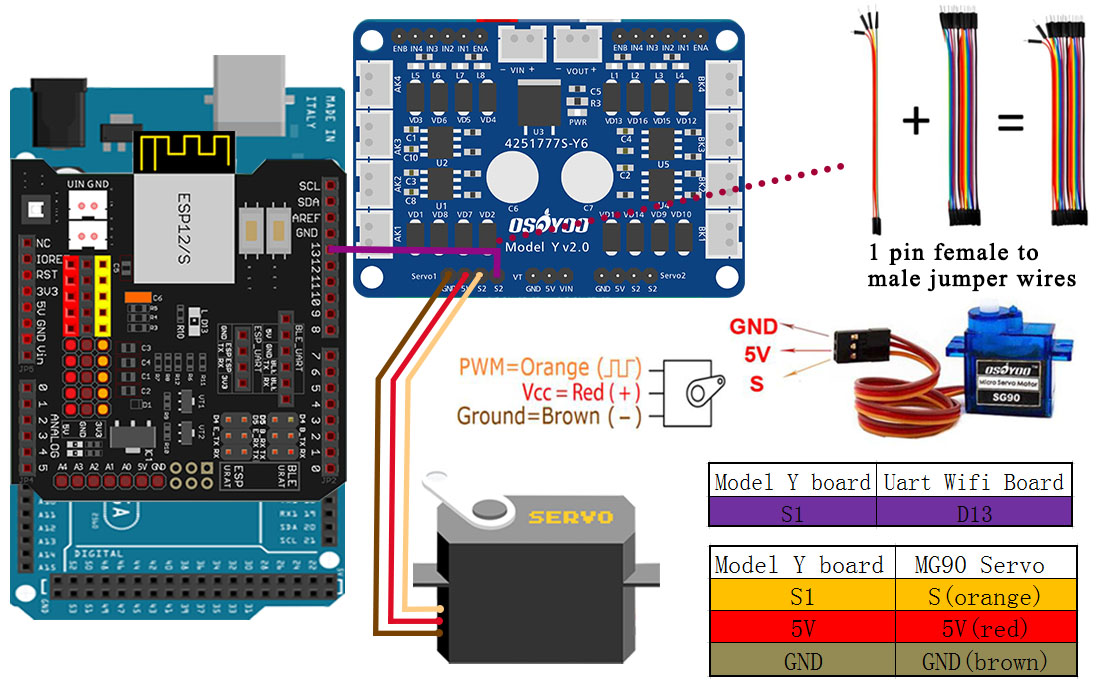
10) Instale el servomotor en la parte delantera del chasis superior del robot con los 2 tornillos autorroscantes M2.2*8.
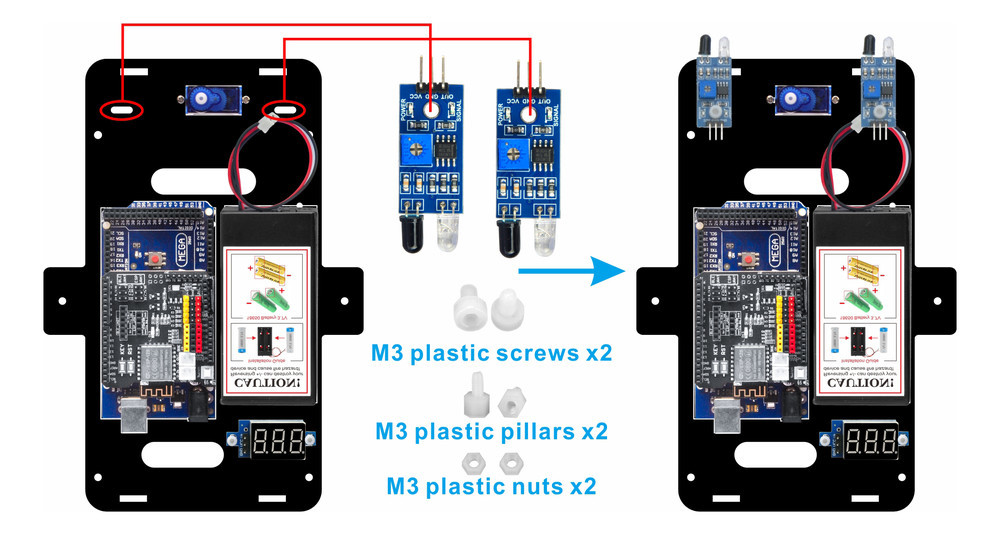
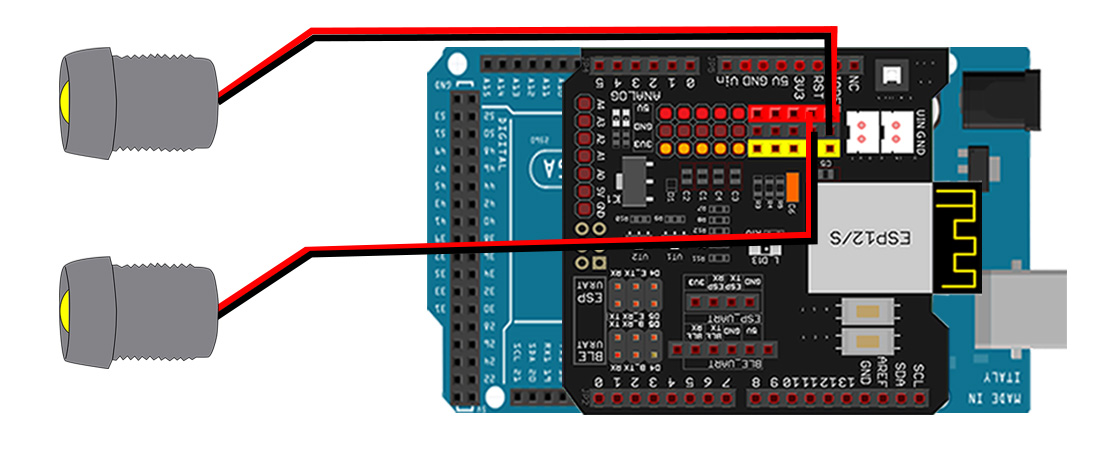
11) Instale los 2 sensores de distancia IR con los 2 tornillos de plástico M3, los pilares de plástico M3 y las tuercas de plástico M3 en la parte delantera del chasis superior del robot. Puede instalar los tornillos de plástico M3 debajo del chasis superior para apretar lo suficientemente los sensores de distancia IR.
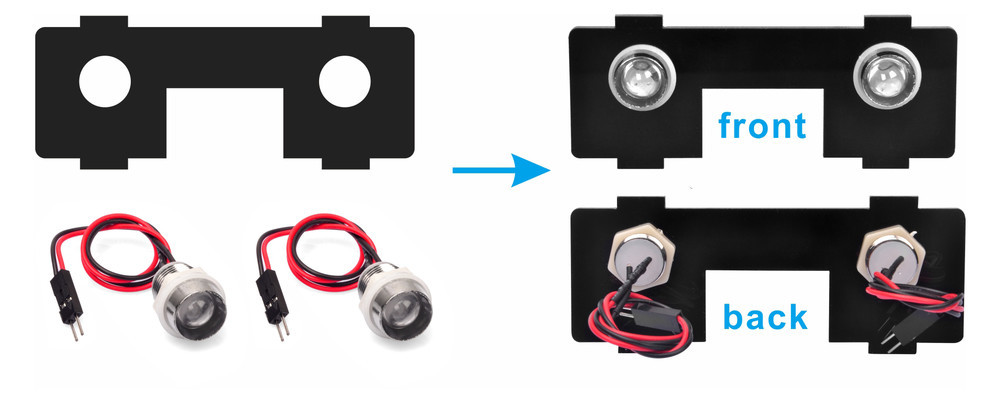
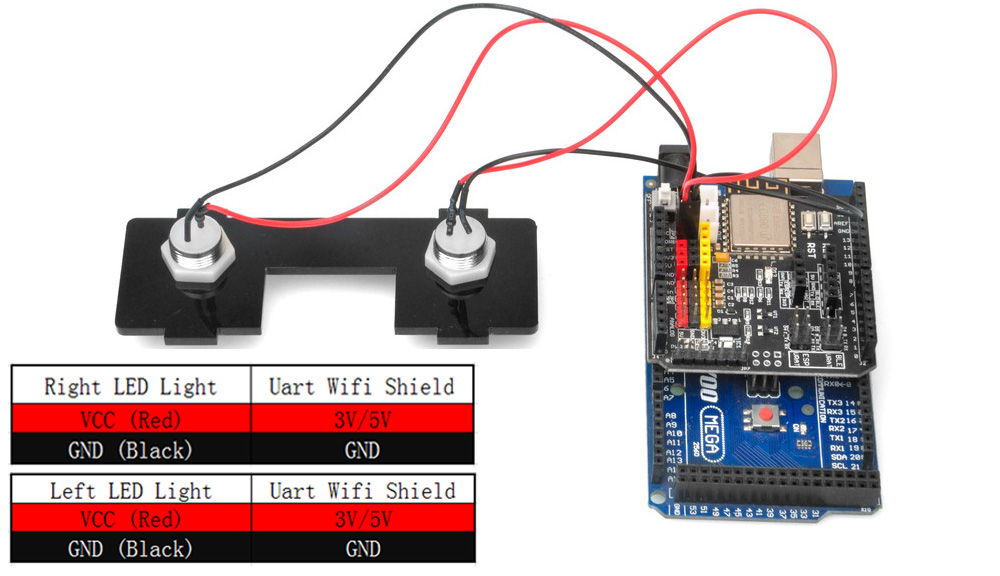
12) Instale las 2 luces LED en la placa de la barrera frontal de la siguiente manera:
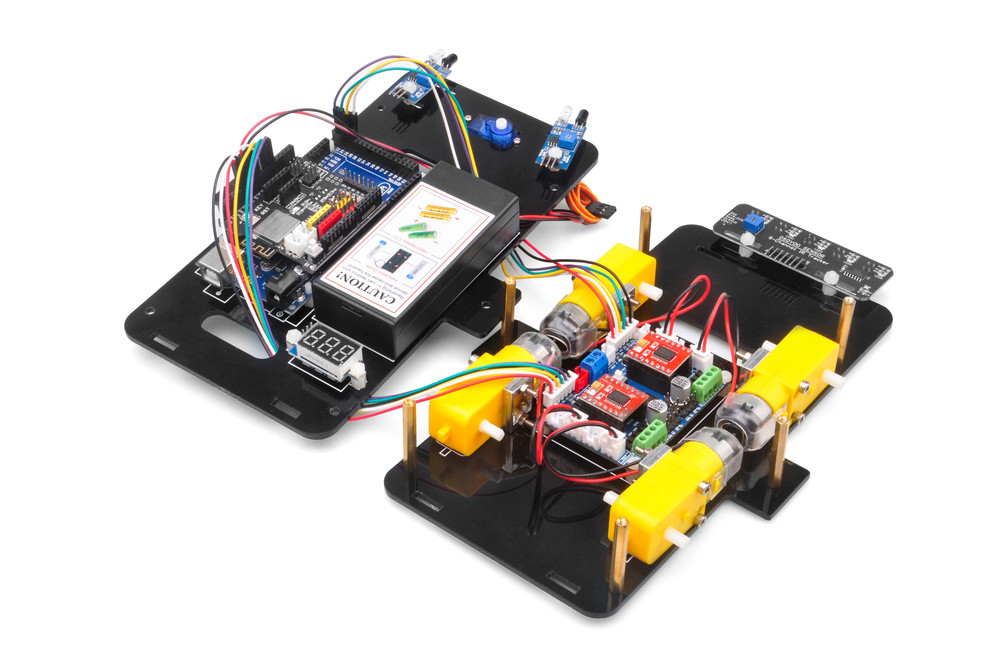
13) Antes de ajustar el chasis superior con el inferior, necesita realizar la conexión del circuito.
14)Conecte la placa modelo Y de OSOYOO al escudo OSOYOO Uart WiFi con los 2 cables de puente de 6 pines macho a hembra de la siguiente manera. Los cables de 6 pines en el Área B deben pasar por el orificio cerca del servo SG90, los otros cables de 6 pines en el área A deben pasar por el orificio cerca del medidor de voltaje.
Precaución: cuando inserte/retire este enchufe de 6 clavijas en el enchufe macho de 6 clavijas del modelo Y, sujete el soporte de clavijas de plástico para realizar la operación. Nunca arrastre los cables para sacar el enchufe del tomacorriente, de lo contrario dañará los cables.
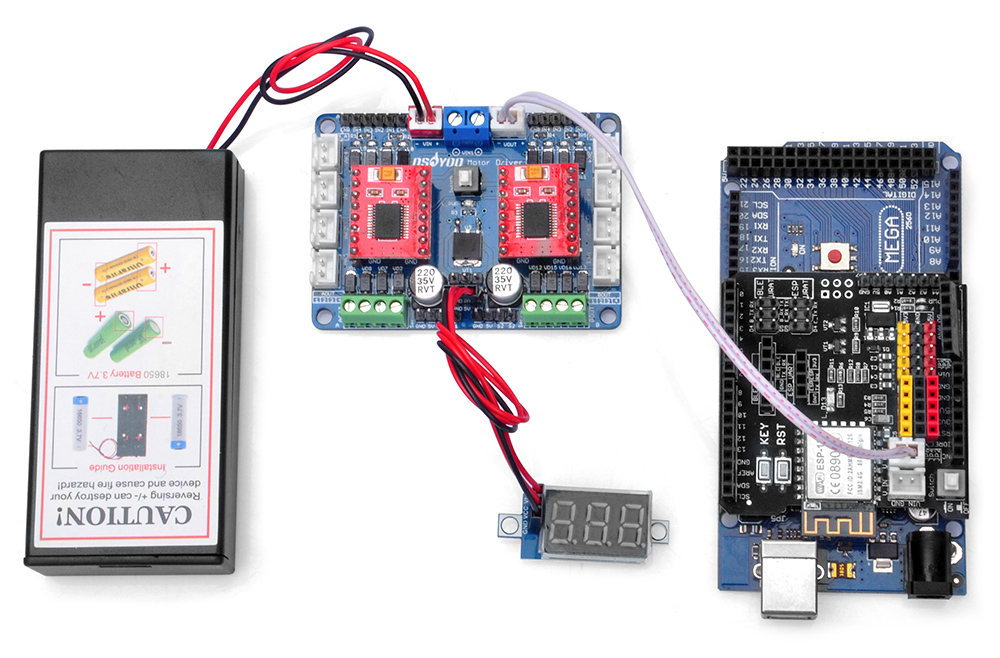
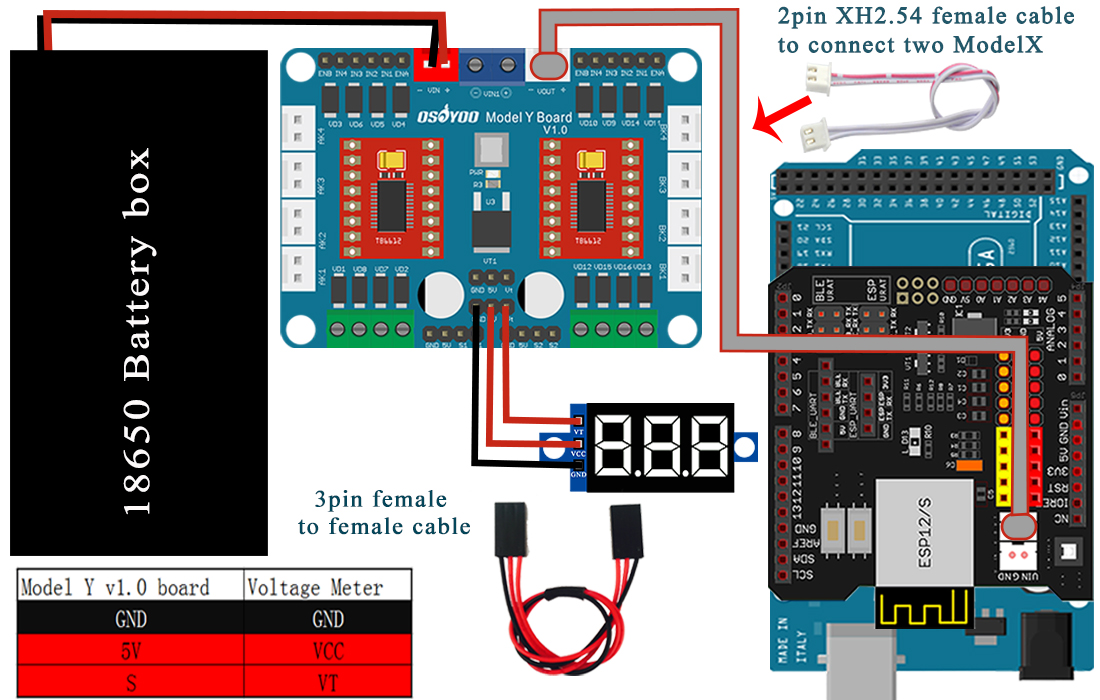
15) Conecte el medidor de voltaje a la placa modelo Y de OSOYOO con un cable de puente hembra a hembra de 3 pines como se muestra a continuación en el diagrama de conexión.
Conecte el enchufe 12V-GND de la placa modelo Y de OSOYOO al enchufe VIN-GND con el cable PnP OSOYOO de 2 pines de 20 cm según el siguiente gráfico.
Conecte la caja de la batería al enchufe VIN-GND del protector OSOYOO Uart WiFi de acuerdo con el diagrama de conexión a continuación.
16) Instale las 2 luces LED en el diafragma transversal delantero de la siguiente manera. Conecte la luz LED al protector OSOYOO Uart WiFi de la siguiente manera.
17) Conecte el servomotor SG90, la placa modelo Y de OSOYOO y el protector WiFi Uart de OSOYOO como se muestra en el siguiente diagrama:
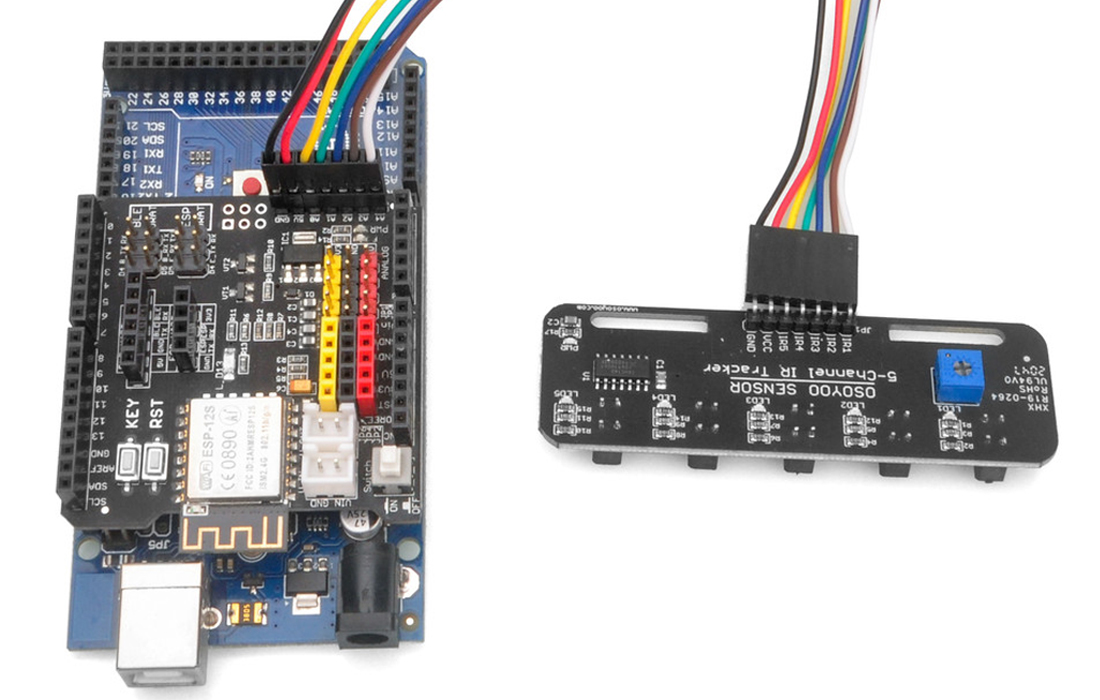
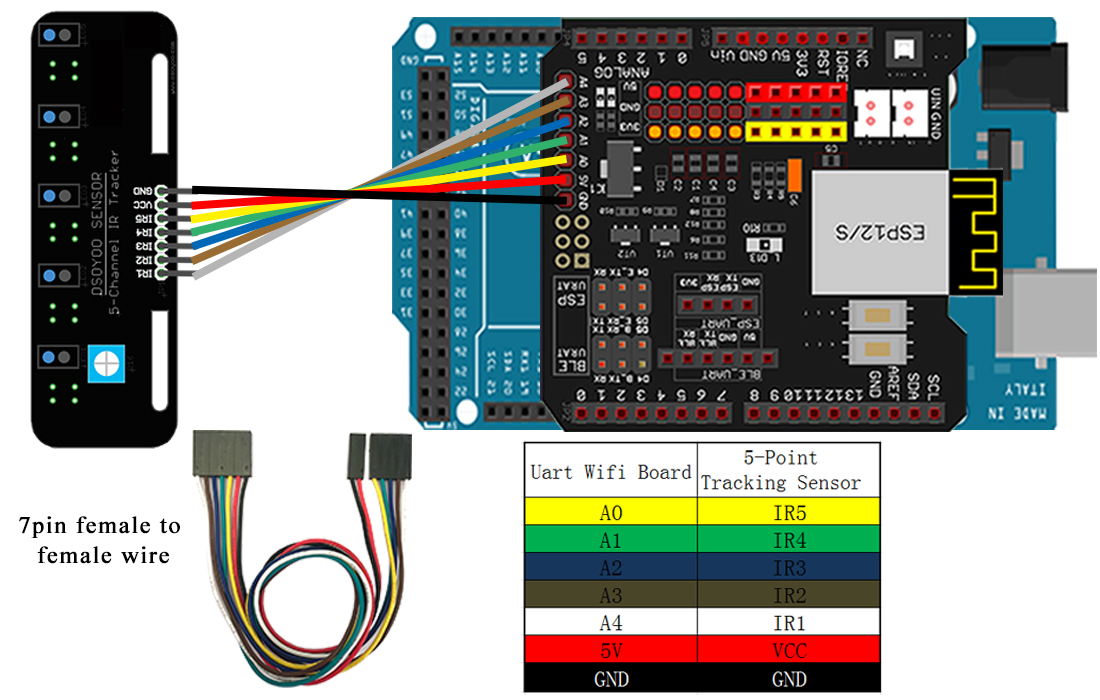
18) Conecte el pin GND-VCC del módulo del sensor de seguimiento a GND-5V del escudo OSOYOO Uart WiFi V1.3; conecte los pines IR1, IR2, IR3, IR4, IR5 a A4, A3, A2, A3, A1 con un cable hembra a hembra de 7 pines y 25 cm como se muestra en la siguiente foto:
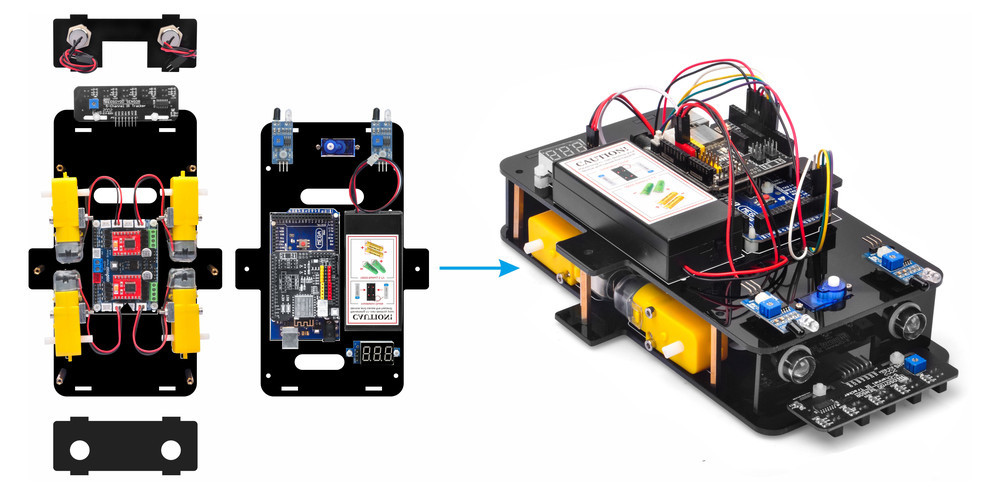
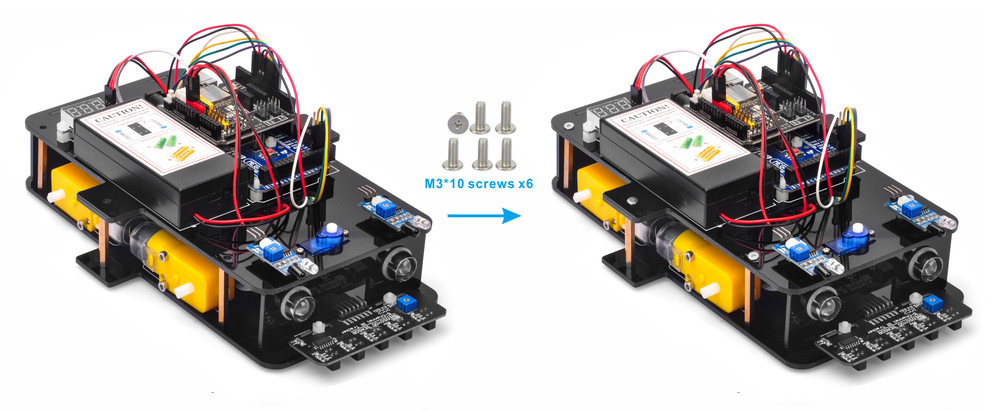
19) Fije el chasis superior al chasis inferior con los 6 tornillos hexagonales M3*10.
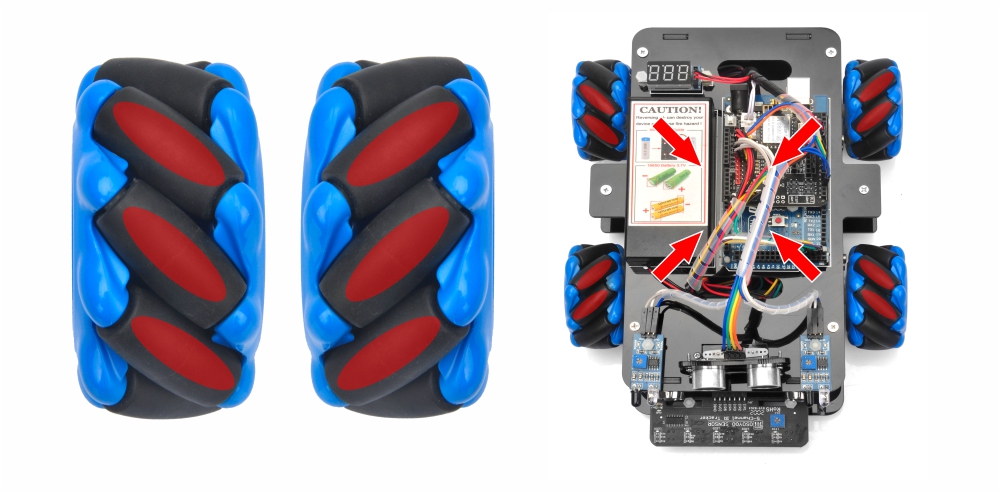
20) Instale las 4 ruedas en los motores con los 4 tornillos M2.2×22.
Nota: hay dos tipos de ruedas y hay que colocarlas de modo que los rodillos apunten hacia el centro del Robot visto desde arriba.
Ahora la instalación del hardware está casi lista. Antes de instalar las baterías 18650 en la caja, necesitamos grabar el código de muestra en la placa Arduino.
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descargue Arduino IDE desde https://www.arduino.cc/en/Main/Software?setlang=en, luego instale el software.
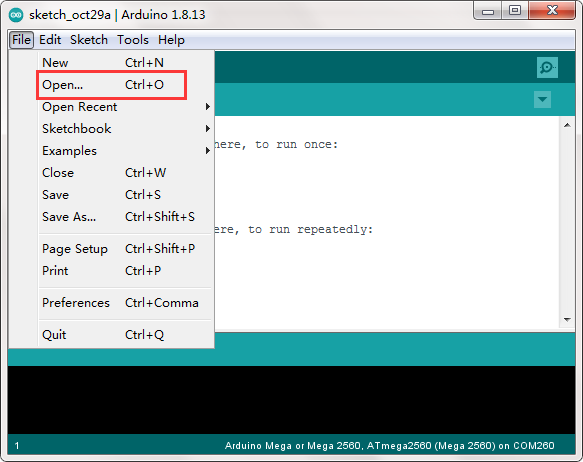
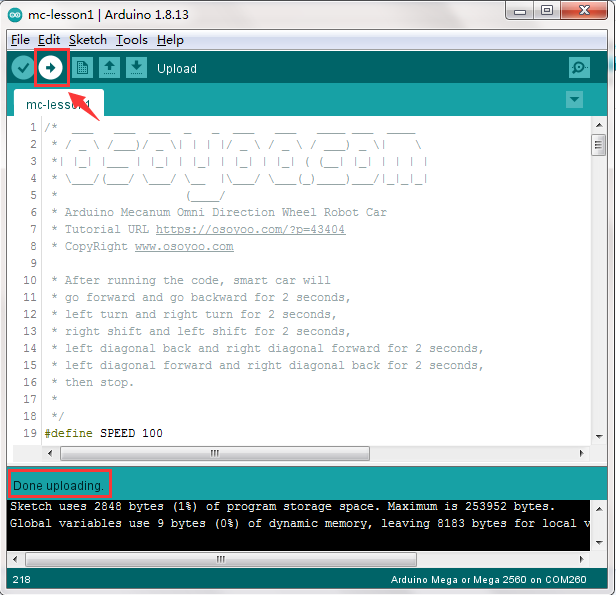
Paso 3: conecte la placa Mega2560 a la PC con un cable USB, abra el IDE Arduino -> haga clic en archivo -> haga clic en Abrir -> elija el código “mc-lesson1.ino” en la carpeta Lesson1 y cargue el código en la placa Arduino.
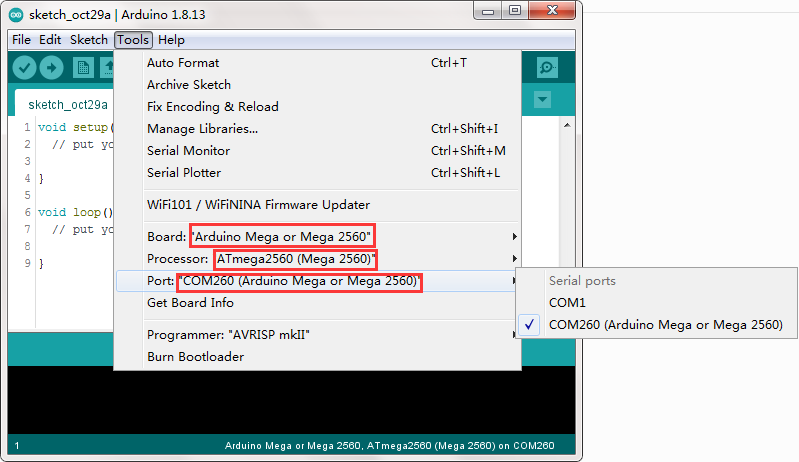
Paso 4: elija la placa/puerto correspondiente para su proyecto, cargue el código en la placa.
Nota: Si el Robot funciona desde el USB (es decir, las ruedas giran cuando no están en contacto con el suelo) pero no funciona cuando el USB está desconectado y las baterías correctamente insertadas, verifique el interruptor de la placa controladora modelo Y del conductor doble; probablemente se golpeó y está encendido. Se puede empujar hacia abajo con un destornillador sin separar la parte superior e inferior.
Desconecte Arduino de la PC, coloque la batería en la caja de la batería. Cuando coloque el Robot en el suelo y encienda el interruptor escudo OSOYOO Uart WIFI V1.3 y el interruptor en la caja de la batería si instaló la caja de la batería para 18650. El Robot debe avanzar → retroceder → girar a la izquierda → girar a la derecha → desplazar paralelo a la derecha → desplazar paralelo a la izquierda → Diagonal izquierda abajo → Diagonal derecha arriba→ Diagonal izquierda arriba → Diagonal derecha abajo y luego detenerse.












Thank You.