Mecanum Wheel Robot Car Paquete completo (con baterías 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
En esta lección3, agregaremos un módulo de sensor de seguimiento de 5 puntos al automóvil robótico integrado en la Lección 1.
El software de esta lección leerá los datos del módulo de sensor de seguimiento de 5 puntos y guiará automáticamente al automóvil inteligente para que se mueva a lo largo de la línea negra. línea de pista en el suelo blanco.
OSOYOO Mecanum ruedas chasis de coche robótico x 1 (2x ruedas izquierdas/2x ruedas derechas y Motor x 4)
Placa OSOYOO Mega2560, totalmente compatible con Arduino x 1
OSOYOO Wi-Fi escudo x 1
Controlador de motor OSOYOO Modelo Y x 1
Módulo de sensor de seguimiento de 5 puntos OSOYOO
OSOYOO Cable de puente hembra a hembra de 3 pines x1
OSOYOO Cable de puente macho a hembra de 6 pines x2
OSOYOO Cable de puente hembra a hembra de 7 pines x1
OSOYOO 2 pin XH.25 hembra a hembra x1
Caja de batería OSOYOO x 1
Baterías 18650 (3,7 V) x 2
Debe completar la lección 1 (ensamblar el automóvil), antes de continuar con esta lección.
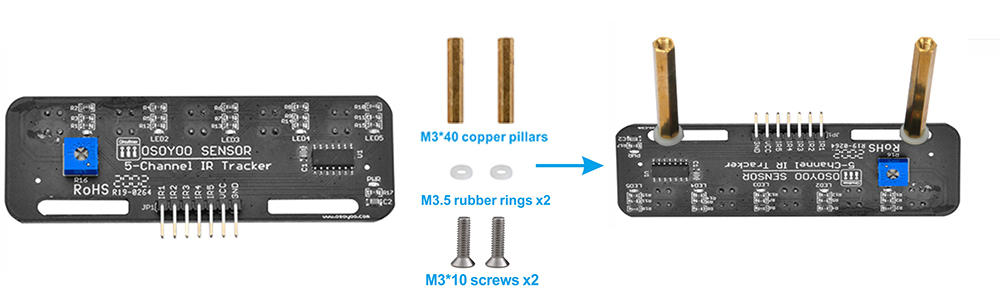
Paso 1: hemos instalado 2 pilares de cobre M3x40 con 2 tornillos M3 y 2 anillos de goma M3.5 en el sensor de seguimiento en la lección 1 como se muestra en las siguientes imágenes.
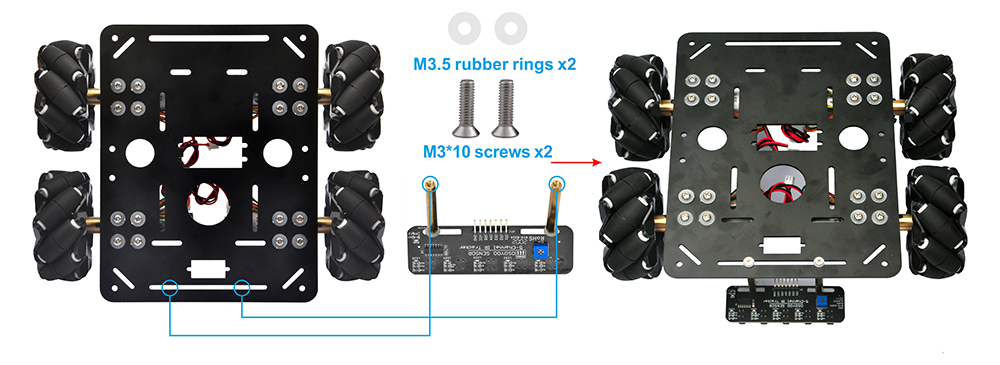
Paso 2. Hemos agregado un módulo de sensor de seguimiento de 5 puntos al chasis del automóvil con tuercas M3 en la lección 1 como se muestra en las siguientes imágenes.
Inicie la instalación desde el estado anterior de la Lección 1. Si ha instalado la Lección 1, no es necesario cambiar nada, simplemente mantenga la conexión del cable del hardware tal como está.
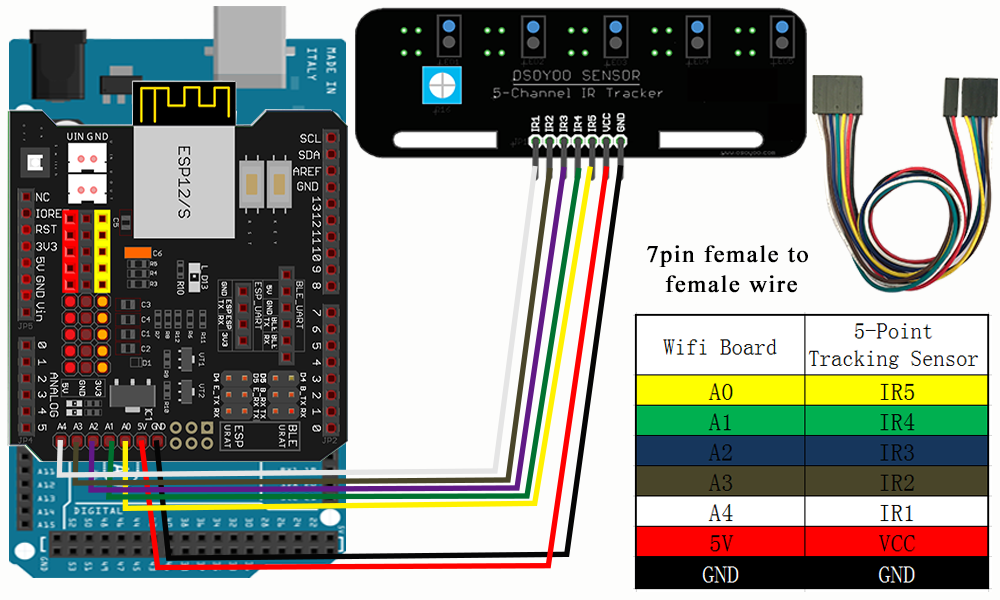
Paso 3: conecte la placa del sensor de seguimiento de 5 puntos a Wi-Fi Shield como se muestra en la siguiente imagen.
Conecte el pin GND del módulo del sensor de seguimiento a GND del escudo Wi-Fi;
Conecte el pin VCC del módulo del sensor de seguimiento a 5 V del escudo Wi-Fi;
Conecte los pines IR1, IR2, IR3, IR4, IR5 a A4, A3, A2, A1, A0 con un cable de 7 pines hembra a hembra como se muestra en la siguiente foto (Recuerde: NO retire ningún cable existente instalado en la Lección 1).
Ajuste la sensibilidad de los módulos de sensores de seguimiento.
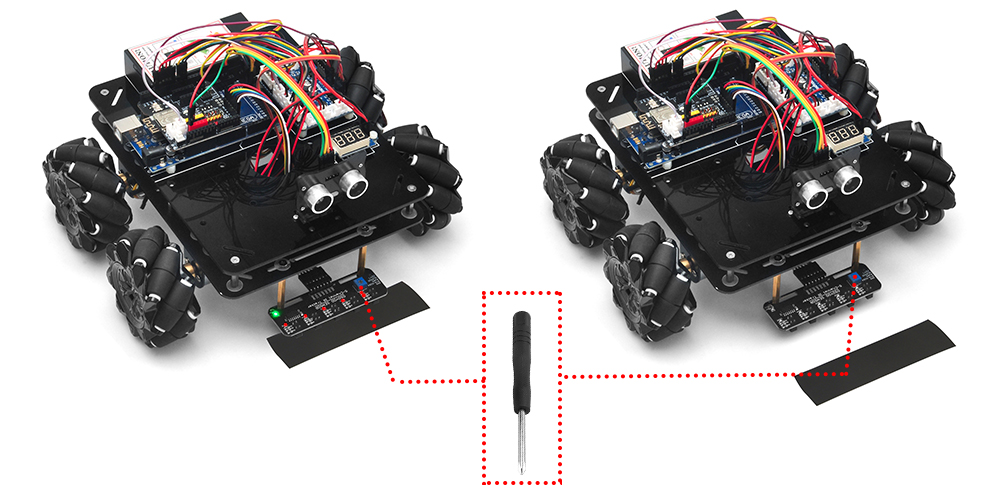
Encienda y sostenga el automóvil y ajuste el potenciómetro en el sensor de seguimiento con un destornillador Phillips hasta que obtenga el mejor estado de sensibilidad: la luz LED indicadora de señal se apagará cuando el sensor esté sobre el suelo blanco, y la señal LED se encenderá cuando el sensor está por encima de la pista negra.
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descarga el IDE de Arduino desde https://www.arduino.cc/en/Main/Software?setlang=en, luego instale el programa.
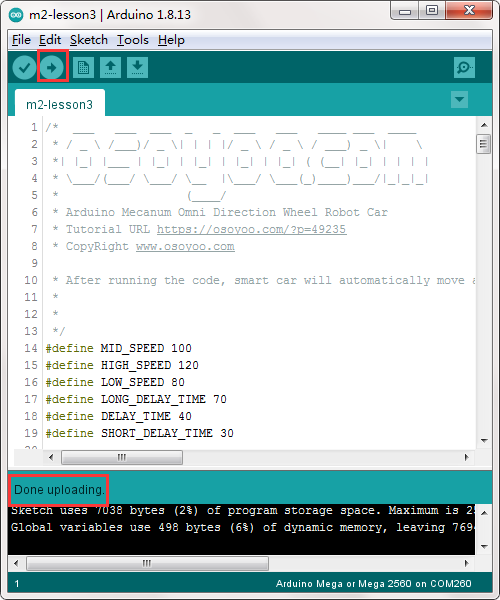
Paso 3: conecte la placa Mega2560 a la PC con un cable USB, abra Arduino IDE → haga clic en archivo → haga clic en Abrir → elija el código “m2-lesson3.ino” en la carpeta de la lección, cargue el código en Arduino de la siguiente manera.
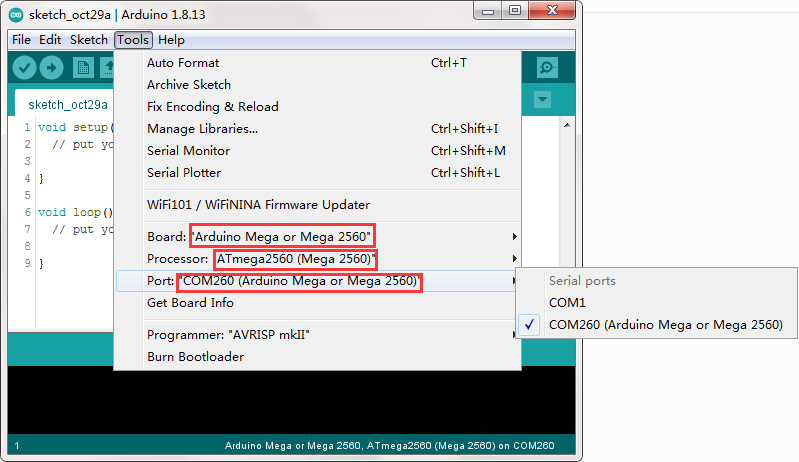
Paso 4: elija la placa/puerto correspondiente para su proyecto, cargue el boceto en la placa.
Paso 5: Ajuste la sensibilidad de los módulos de sensores de seguimiento. Encienda y sostenga el automóvil y ajuste el potenciómetro en el sensor de seguimiento con un destornillador Phillips hasta que obtenga el mejor estado de sensibilidad: la luz LED indicadora de señal se apagará cuando el sensor esté sobre el suelo blanco, y la señal LED se encenderá cuando el sensor está por encima de la pista negra.
Preparar una pista negra (el ancho de la pista negra debe estar entre 20 mm y 30 mm) en fondo blanco. Tenga en cuenta que el ángulo de curvatura de la pista no puede ser demasiado agudo, de lo contrario, el automóvil se saldrá de la pista.
Encienda el automóvil y coloque el centro del módulo del sensor de seguimiento hacia la pista negra, y luego el automóvil se moverá a lo largo de la pista negra automáticamente.
Parámetros importantes en el archivo de boceto
Ajuste de la velocidad del motor para un mejor rendimiento de seguimiento
Para obtener un mejor resultado de rendimiento de seguimiento, el valor de la potencia del motor (velocidad) debe ajustarse correctamente según el nivel de la batería. Si el valor de la potencia del motor (velocidad) es demasiado alto, es posible que su automóvil funcione demasiado rápido y se desvíe fácilmente. Si la potencia del motor (velocidad) es demasiado baja, es posible que el automóvil ni siquiera se mueva.
Para ajustar el valor de potencia del motor, debe cambiar las 3 constantes: MID_SPEED, HIGH_SPEED, LOW_SPEED en la línea 14,15,16 en el archivo de boceto m2-lesson3.ino. Sus valores predeterminados son 100,120,80, que son buenos cuando las baterías están completamente cargadas.
Después de que las baterías se estén agotando, es posible que deba aumentar el valor de estas 3 constantes. Puede agregar o reducir gradualmente 10 cada vez en estos valores y comparar qué valores tienen el mejor rendimiento de seguimiento.















Could we use the sensor module to have a percent of light and not only 1 or 2?