Mecanum Wheel Robot Car Full Package (with 18650 batteries)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In questa lezione3, aggiungeremo un modulo del sensore di tracciamento a 5 punti all’auto robotica costruita nella Lezione 1. Il software in questa lezione leggerà i dati dal modulo del sensore di tracciamento a 5 punti e guiderà automaticamente l’auto intelligente a muoversi lungo il nero linea di traccia nel terreno bianco.
OSOYOO Ruote Mecanum telaio per auto robotica x 1 (2x ruote sinistre / 2x ruote destre e motore x 4)
Scheda OSOYOO Mega2560, completamente compatibile con Arduino x 1
Schermatura Wi-Fi OSOYOO x 1
Driver del motore OSOYOO modello Y x 1
OSOYOO Modulo sensore di tracciamento a 5 punti
OSOYOO ponticello da 3 pin femmina a femmina x1
OSOYOO 6 pin maschio a ponticello femmina x2
OSOYOO ponticello da 7 pin femmina a femmina x1
OSOYOO 2 pin XH.25 da femmina a femmina x1
Scatola batteria OSOYOO x 1
18650 batterie (3,7 V) x 2
Devi completare la lezione 1 (assemblaggio dell’auto) prima di continuare con questa lezione.
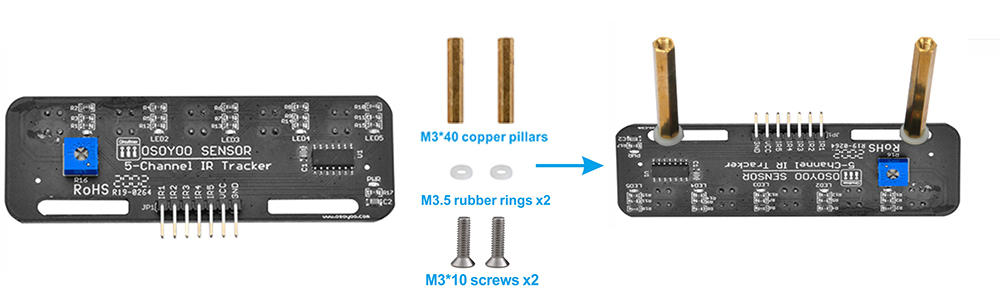
Passaggio 1: abbiamo installato 2 pilastri in rame M3x40 con 2 viti M3 e 2 anelli in gomma M3.5 sul sensore di tracciamento nella lezione 1 come nelle seguenti immagini.
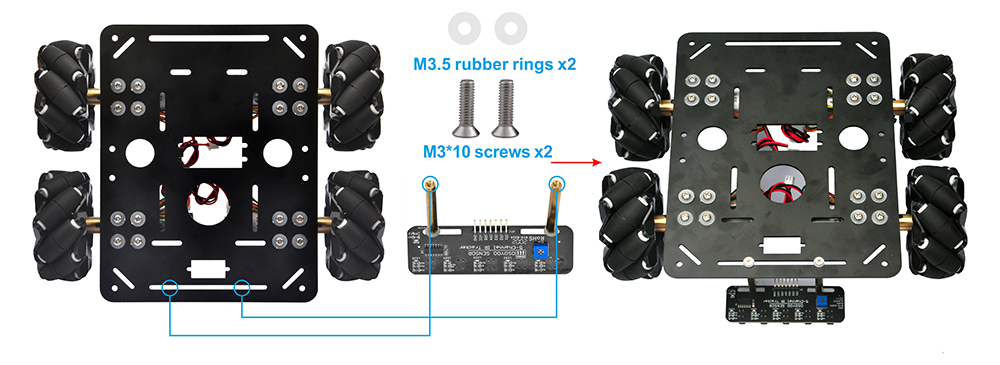
Passo 2. Abbiamo aggiunto un modulo sensore di tracciamento a 5 punti al telaio dell’auto con dadi M3 nella lezione 1 come nelle seguenti immagini.
Avviare l’installazione dallo stato precedente della Lezione 1. Se è stata installata la Lezione 1, non è necessario modificare nulla, è sufficiente mantenere la connessione del cavo hardware così com’è.
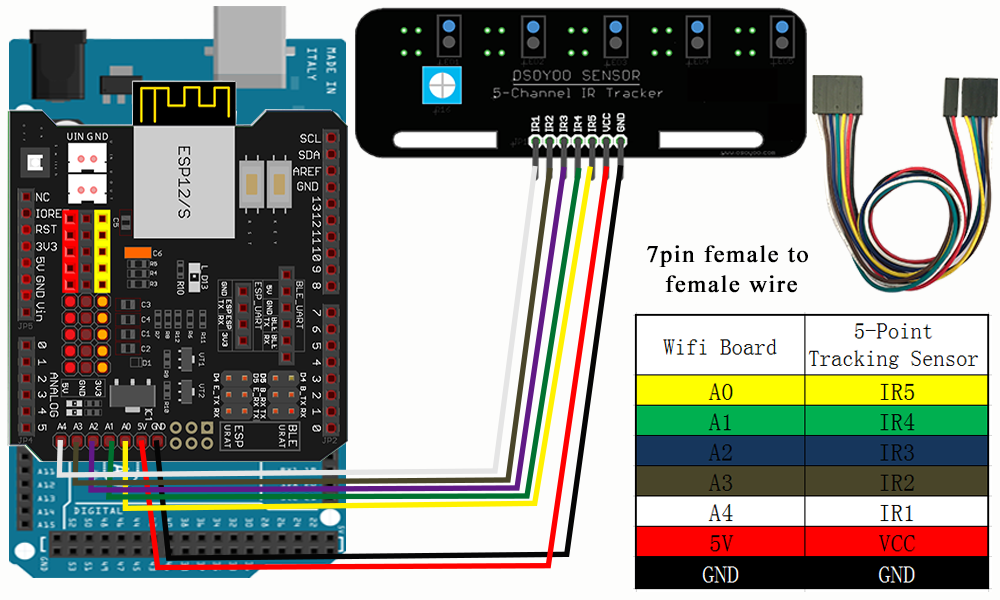
Passaggio 3: collegare la scheda del sensore di tracciamento a 5 punti a Wi-Fi Shield come mostrato nell’immagine seguente.
Collegare il pin GND del modulo del sensore di tracciamento a GND dello schermo Wi-Fi;
Collegare il pin VCC del modulo sensore di tracciamento a 5 V dello schermo Wi-Fi;
Collegare i pin IR1, IR2, IR3, IR4, IR5 a A4, A3, A2, A1, A0 con un cavo femmina-femmina a 7 pin come mostrato nella foto seguente (Ricordare: NON rimuovere i cavi esistenti installati nella Lezione 1).
Regola la sensibilità dei moduli del sensore di tracciamento.
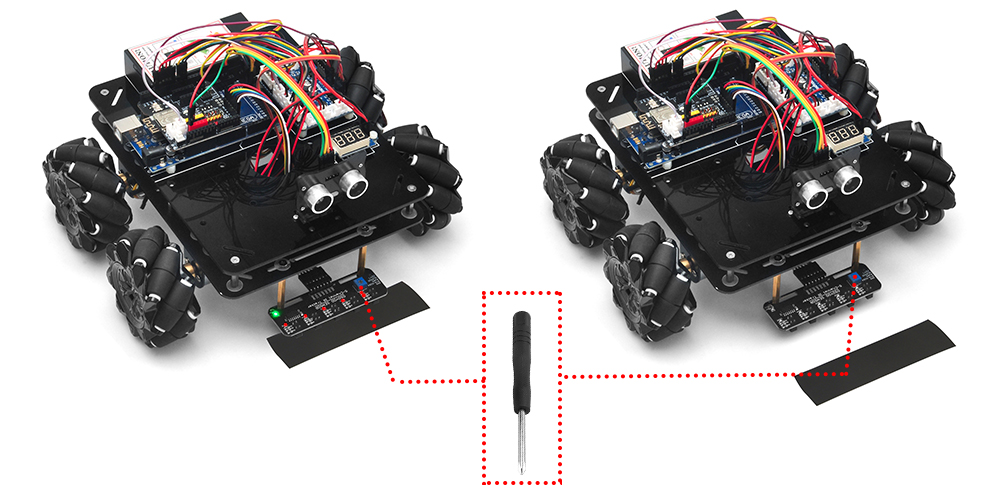
Accendi e mantieni l’auto e regola il potenziometro sul sensore di tracciamento con un cacciavite Phillips fino a ottenere il miglior stato di sensibilità:
Accendi e mantieni l’auto e regola il potenziometro sul sensore di tracciamento con un cacciavite Phillips fino a ottenere il miglior stato di sensibilità: la spia LED dell’indicatore di segnale si spegnerà quando il sensore si trova sopra il terreno bianco e il LED di segnale si accenderà quando il sensore è sopra la traccia nera.
Passaggio 1:Installa l’ultimo IDE di Arduino (se hai una versione dell’IDE di Arduino successiva alla 1.1.16, salta questo passaggio). Scarica Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installare il software.
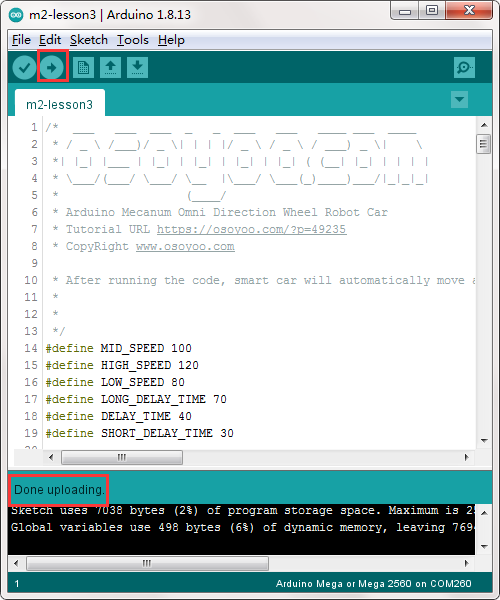
Passaggio 3: collegare la scheda Mega2560 al PC con il cavo USB, aprire Arduino IDE → fare clic su file → fare clic su Apri → scegliere il codice “m2-lesson3.ino” nella cartella della lezione, caricare il codice in Arduino come segue
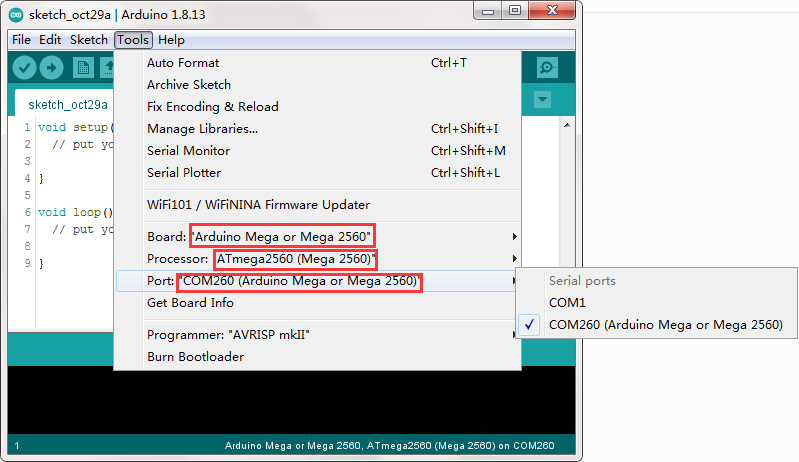
Passaggio 4: scegli la scheda/porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
Passaggio 5: regola la sensibilità dei moduli del sensore di tracciamento. Accendi e mantieni l’auto e regola il potenziometro sul sensore di tracciamento con un cacciavite Phillips fino a ottenere il miglior stato di sensibilità: la spia LED dell’indicatore di segnale si spegnerà quando il sensore si trova sopra il terreno bianco e il LED di segnale si accenderà quando il sensore è sopra la traccia nera.
Preparare una pista nera (la larghezza della pista nera deve essere compresa tra 20 mm e 30 mm) in fondo bianco. Tieni presente che l’angolo di curvatura della pista non può essere troppo acuto, altrimenti l’auto uscirà dalla pista.
Accendi l’auto e posiziona il centro del modulo del sensore di tracciamento rivolto verso la pista nera, quindi l’auto si muoverà automaticamente lungo la pista nera.
Parametri importanti nel file di schizzo
Regolazione della velocità del motore per migliori prestazioni di tracciamento
Per ottenere risultati di tracciamento migliori, il valore della potenza del motore (velocità) deve essere regolato correttamente in base al livello della batteria. Se il valore della potenza del motore (velocità) è troppo alto, la tua auto potrebbe correre troppo velocemente e uscire facilmente dalla traiettoria. Se la potenza del motore (velocità) è troppo bassa, l’auto potrebbe anche non muoversi.
Per regolare il valore della potenza del motore, è necessario modificare le 3 costanti: MID_SPEED, HIGH_SPEED, LOW_SPEED nella riga 14,15,16 nello sketch file m2-lesson3.ino. I loro valori predefiniti sono 100,120,80 che sono buoni quando le batterie sono completamente cariche.
Dopo che le batterie si stanno scaricando, potrebbe essere necessario aumentare il valore di queste 3 costanti. Puoi aggiungere o ridurre gradualmente 10 ogni volta su questi valori e confrontare quali valori hanno le migliori prestazioni di tracciamento.















Could we use the sensor module to have a percent of light and not only 1 or 2?