Mecanum Wheel Robot Car Komplettpaket (mit 18650 Batterien)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In dieser Lektion 3 fügen wir dem in Lektion 1 gebauten Roboterauto ein 5-Punkt-Tracking-Sensormodul hinzu. Die Software in dieser Lektion liest Daten aus dem 5-Punkt-Tracking-Sensormodul und führt das intelligente Auto automatisch entlang des Schwarzen Spurlinie im weißen Grund.
OSOYOO Mecanum-Räder Roboter-Auto-Chassis x 1 (2x linke Räder/2x rechte Räder und Motor x 4)
OSOYOO Mega2560 Board voll kompatibel mit Arduino x 1
OSOYOO WiFi-Schild x 1
OSOYOO Model Y Motortreiber x 1
OSOYOO 5-Punkt-Tracking-Sensormodul
OSOYOO 3-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 6-Pin-Überbrückungskabel von Stecker zu Buchse x2
OSOYOO 7-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 2-polige XH.25-Buchse auf Buchse x1
OSOYOO Batteriekasten x 1
18650 Batterien (3,7 V) x 2
Sie müssen Lektion 1 (Zusammenbau des Autos) abschließen, bevor Sie mit dieser Lektion fortfahren
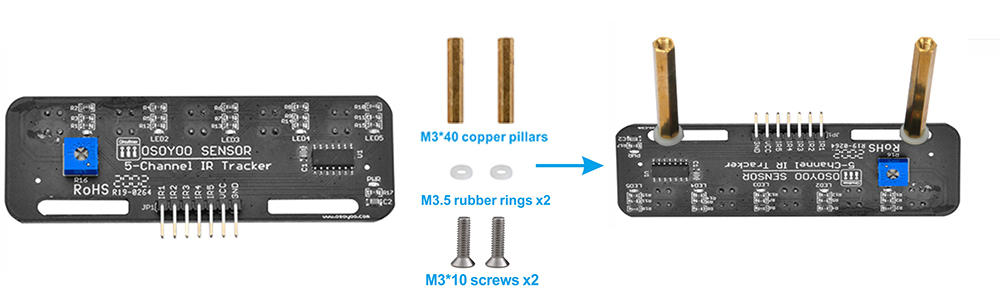
Schritt 1: Wir haben 2 Stück M3x40-Kupfersäulen mit 2 Stück M3-Schrauben und 2 Stück M3,5-Gummiringen am Ortungssensor in Lektion 1 wie in den folgenden Bildern installiert.
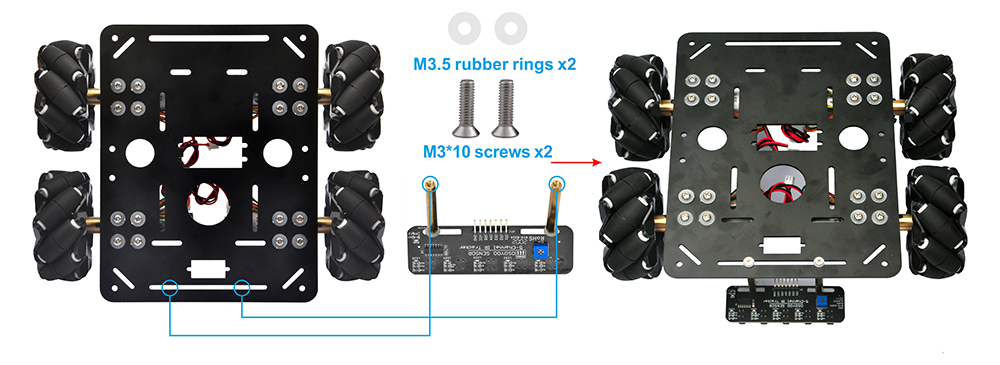
Schritt 2. Wir haben dem Fahrzeugchassis mit M3-Muttern in Lektion 1 ein 5-Punkt-Tracking-Sensormodul wie in den folgenden Bildern hinzugefügt.
Starten Sie die Installation vom vorherigen Stand von Lektion 1 . Wenn Sie Lektion 1 installiert haben, brauchen Sie nichts zu ändern, lassen Sie einfach die Hardware-Kabelverbindung so wie sie ist.
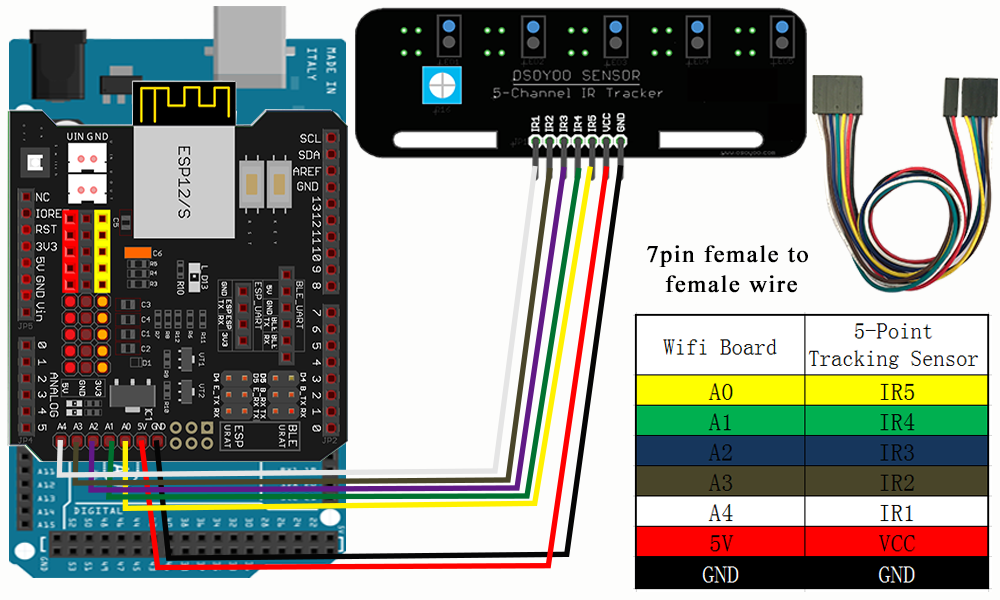
Schritt 3: Verbinden Sie die 5-Punkt-Tracking-Sensorplatine wie im folgenden Bild mit dem WIFI-Schild.
Verbinden Sie den GND-Pin des Tracking-Sensormoduls mit dem GND des WLAN-Schildes;
Verbinden Sie den VCC-Pin des Tracking-Sensormoduls mit 5 V des WLAN-Schildes;
Verbinden Sie die Pins IR1, IR2, IR3, IR4, IR5 mit A4, A3, A2, A1, A0 mit einem 7-poligen Kabel von Buchse zu Buchse, wie das folgende Foto zeigt (Denken Sie daran: Entfernen Sie KEINE bestehenden Kabel, die in Lektion 1 installiert wurden).
Passen Sie die Empfindlichkeit von Tracking-Sensormodulen an.
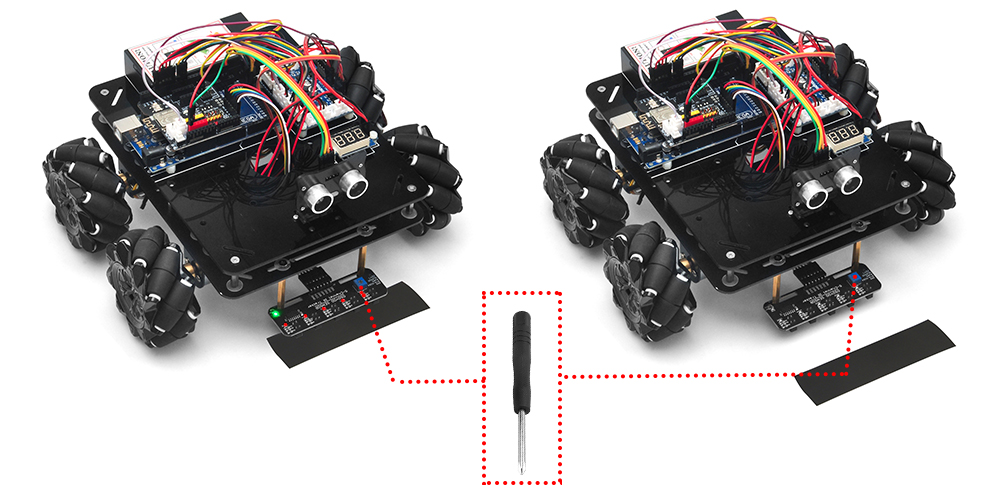
Schalten Sie das Auto ein und halten Sie es fest und stellen Sie das Potentiometer am Tracking-Sensor mit einem Kreuzschraubendreher ein, bis Sie den besten Empfindlichkeitsstatus erhalten: Das Signal zeigt an, dass die LED-Leuchte ausgeschaltet wird, wenn sich der Sensor über weißem Grund befindet, und die Signal-LED leuchtet auf, wenn der Sensor aufleuchtet ist über der schwarzen Spur.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt). Laden Sie Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en herunter und installieren Sie dann die Software.
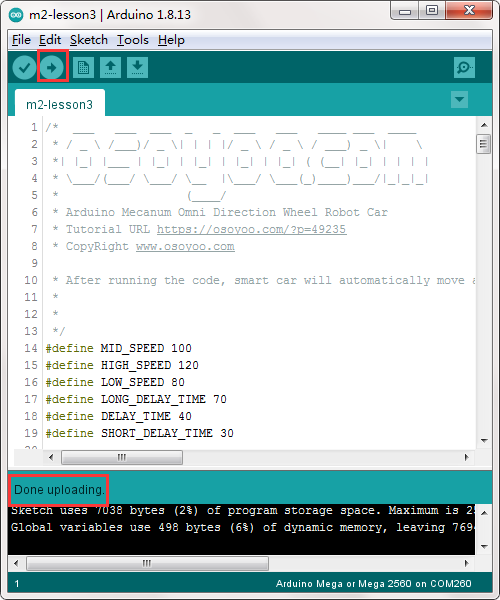
Schritt 3: Schließen Sie das Mega2560-Board mit einem USB-Kabel an den PC an, öffnen Sie die Arduino IDE -> klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code „m2-lesson3.ino“ im Unterrichtsordner, laden Sie den Code wie folgt in Arduino.
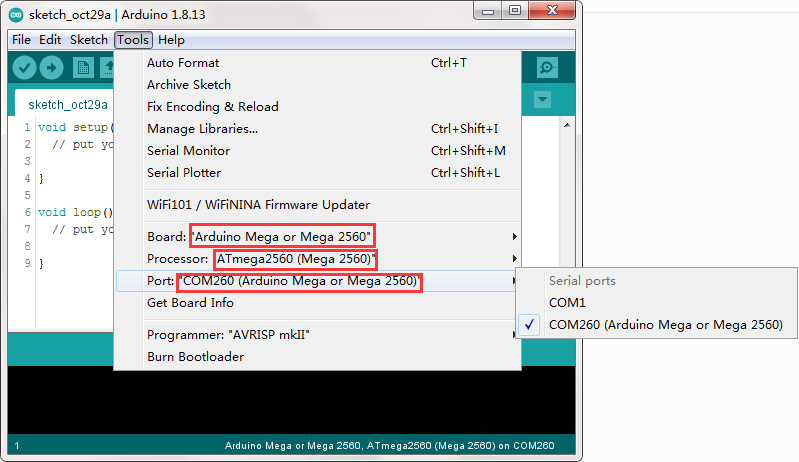
Schritt 4: Wählen Sie das entsprechende Board / Port für Ihr Projekt, laden Sie die Skizze auf das Board hoch.
Schritt 5: Passen Sie die Empfindlichkeit der Tracking-Sensormodule an. Schalten Sie das Auto ein und halten Sie es fest und stellen Sie das Potentiometer am Tracking-Sensor mit einem Kreuzschraubendreher ein, bis Sie den besten Empfindlichkeitsstatus erhalten: Das Signal zeigt an, dass die LED-Leuchte ausgeschaltet wird, wenn sich der Sensor über weißem Grund befindet, und die Signal-LED leuchtet auf, wenn der Sensor aufleuchtet ist über der schwarzen Spur.
Bereiten Sie eine schwarze Spur vor (die Breite der schwarzen Spur muss zwischen 20 mm und 30 mm liegen) in weißem Grund. Bitte beachten Sie, dass der Krümmungswinkel der Strecke nicht zu scharf sein darf, da sich das Auto sonst aus der Strecke bewegt.
Schalten Sie das Auto ein und legen Sie die Mitte des Tracking-Sensormoduls auf die schwarze Spur, und dann bewegt sich das Auto automatisch entlang der schwarzen Spur.
Wichtige Parameter in der Skizzendatei
Motorgeschwindigkeits-Tuning für bessere Tracking-Leistung
Um ein besseres Tracking-Leistungsergebnis zu erhalten, sollte der Wert der Motorleistung (Geschwindigkeit) entsprechend dem Batteriestand richtig eingestellt werden. Wenn die Motorleistung (Geschwindigkeit) zu hoch ist, fährt Ihr Auto möglicherweise zu schnell und kommt leicht aus der Spur. Wenn die Motorleistung (Geschwindigkeit) zu niedrig ist, bewegt sich das Auto möglicherweise nicht einmal.
Um den Motorleistungswert anzupassen, müssen Sie die 3 Konstanten ändern: MID_SPEED, HIGH_SPEED, LOW_SPEED in Zeile 14,15,16 in der Skizzendatei m2-lesson3.ino. Ihre Standardwerte sind 100,120,80, was gut ist, wenn die Batterien voll aufgeladen sind.
Wenn die Batterien zur Neige gehen, müssen Sie möglicherweise den Wert dieser 3 Konstanten erhöhen. Sie können diese Werte schrittweise um jeweils 10 erhöhen oder verringern und vergleichen, welche Werte die beste Tracking-Leistung aufweisen.















Could we use the sensor module to have a percent of light and not only 1 or 2?