Mecanum Wheel Robot Car Full Package (avec batteries 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Les voitures robots ci-dessus sont contrôlées par Arduino. Si vous avez une carte Raspberry Pi, la voiture robot peut également être contrôlée par Raspberry Pi. Vous pouvez visiter le lien suivant pour apprendre le mouvement de base avec Raspberry Pi.
lien- https://osoyoo.com/?p=31428
Dans cette leçon 3, nous ajouterons un module de capteur de suivi à 5 points à la voiture robotique construite dans la leçon 1. Le logiciel de cette leçon lira les données du module de capteur de suivi à 5 points et guidera automatiquement la voiture intelligente pour se déplacer le long du noir. ligne de piste dans le sol blanc.
Châssis de voiture robotique à roues OSOYOO Mecanum x 1 (2x roues gauches / 2x roues droites et moteur x 4)
Carte OSOYOO Mega2560 entièrement compatible avec Arduino x 1
Bouclier Wi-Fi OSOYOO x 1
Pilote de moteur OSOYOO modèle Y x 1
Module de capteur de suivi à 5 points OSOYOO
Fil de raccordement femelle à femelle OSOYOO 3 broches x1
Fil de connexion OSOYOO 6 broches mâle à femelle x2
Fil de raccordement femelle à femelle OSOYOO 7 broches x1
OSOYOO 2 broches XH.25 femelle à femelle x1
Boîtier de batterie OSOYOO x 1
Piles 18650 (3,7 V) x 2
Vous devez terminer la leçon 1 (montage de la voiture) avant de continuer avec cette leçon.
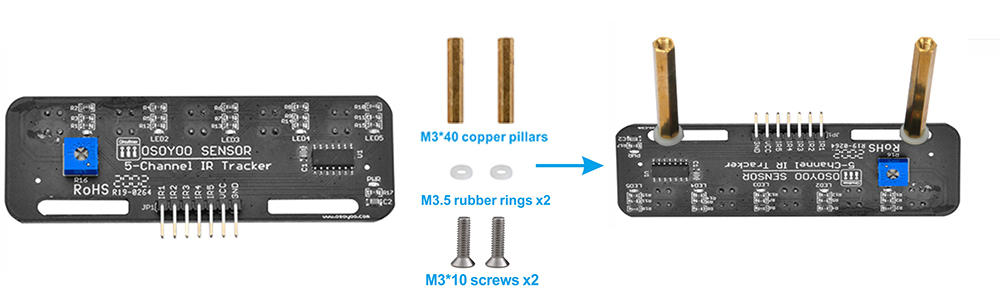
Étape 1 : Nous avons installé 2 piliers en cuivre M3x40 avec 2 vis M3 et 2 anneaux en caoutchouc M3.5 sur le capteur de suivi dans la leçon 1 comme les images suivantes.
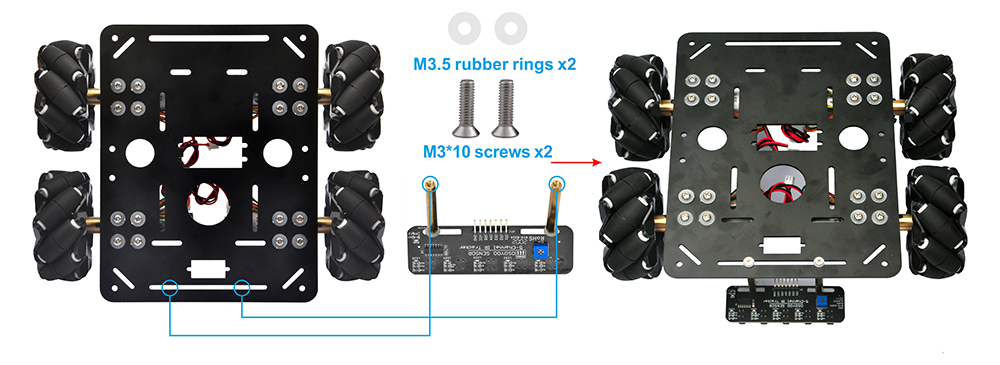
Étape 2. Nous avons ajouté un module de capteur de suivi à 5 points au châssis de la voiture avec des écrous M3 dans la leçon 1 comme les images suivantes.
Démarrez l’installation à partir de l’état précédent de la leçon 1 . Si vous avez installé la leçon 1, il n’est pas nécessaire de modifier quoi que ce soit, conservez simplement la connexion filaire matérielle telle quelle.
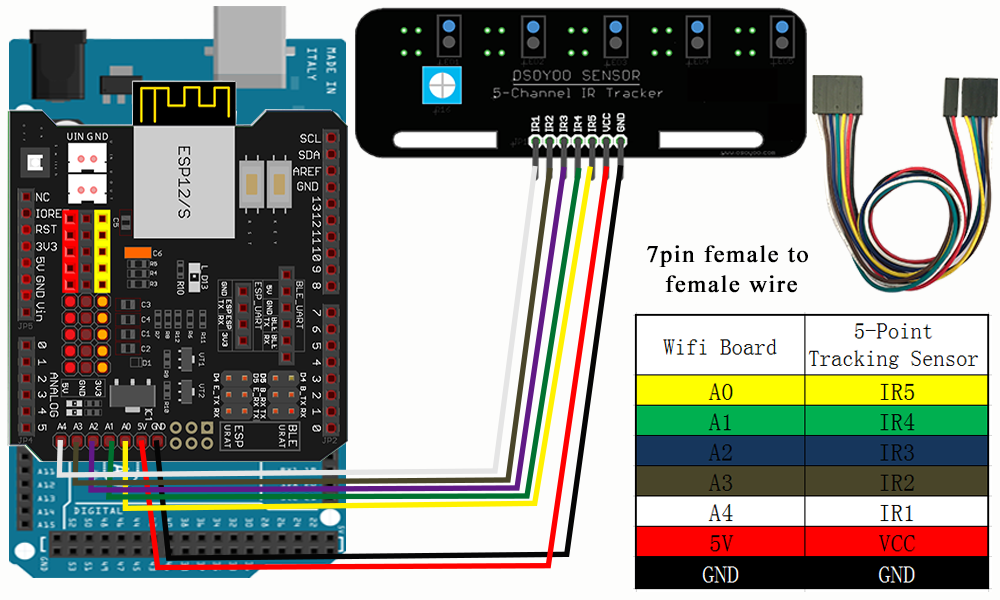
Étape 3 : Connectez la carte du capteur de suivi à 5 points au WIFI Shield selon l’image suivante.
Connectez la broche GND du module de capteur de suivi au GND du bouclier Wi-Fi ;
Connectez la broche VCC du module de capteur de suivi à 5 V du bouclier Wi-Fi ;
Connectez les broches IR1, IR2, IR3, IR4, IR5 à A4, A3, A2, A1, A0 avec un câble femelle à femelle à 7 broches comme le montre la photo suivante (rappelez-vous : NE retirez PAS les fils existants installés dans la leçon 1).
Ajuster la sensibilité des modules de capteur de suivi.
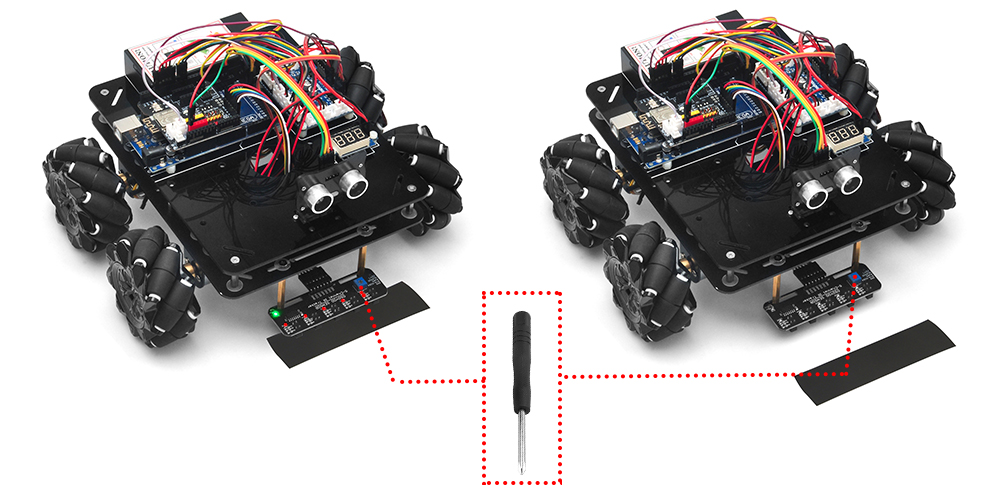
Allumez et maintenez la voiture et ajustez le potentiomètre sur le capteur de suivi avec un tournevis cruciforme jusqu’à ce que vous obteniez le meilleur état de sensibilité : le signal indique que le voyant LED s’éteint lorsque le capteur est au-dessus du sol blanc, et le signal LED s’allume lorsque le capteur est au-dessus de la piste noire.
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous disposez d’une version de l’IDE Arduino postérieure à la version 1.1.16, veuillez ignorer cette étape). Téléchargez Arduino IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en , puis installez le logiciel.
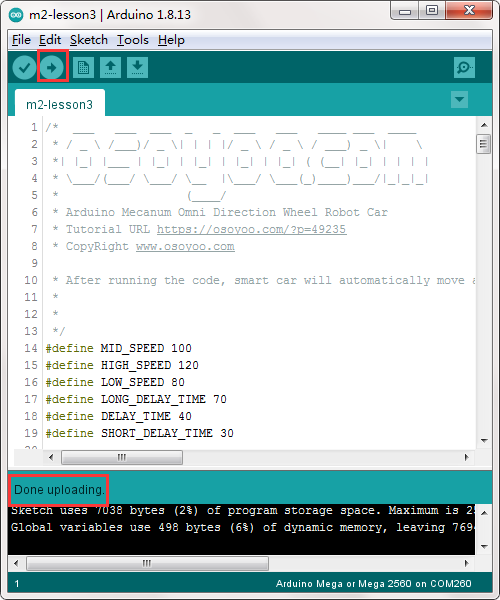
Étape 3 : Connectez la carte Mega2560 au PC avec un câble USB, ouvrez Arduino IDE -> cliquez sur fichier -> cliquez sur Ouvrir -> choisissez le code “m2-lesson3.ino” dans le dossier de la leçon, chargez le code dans Arduino comme suit.
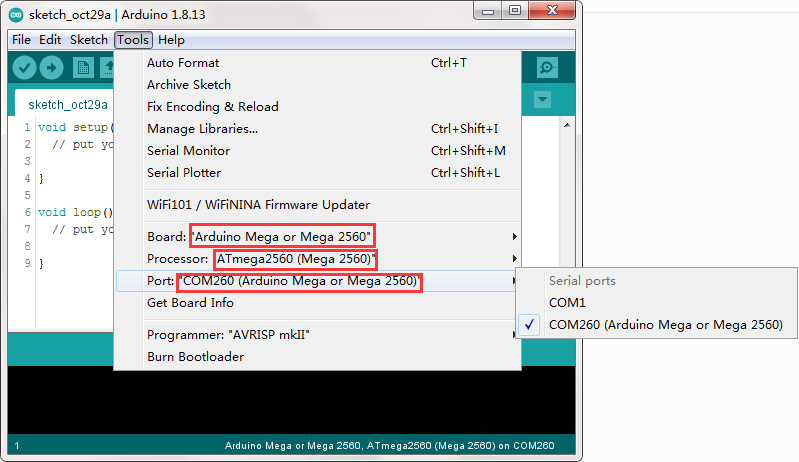
Étape 4 : choisissez la carte/port correspondant à votre projet, téléchargez le croquis sur la carte.
Étape 5 : Ajustez la sensibilité des modules de capteur de suivi. Allumez et maintenez la voiture et ajustez le potentiomètre sur le capteur de suivi avec un tournevis cruciforme jusqu’à ce que vous obteniez le meilleur état de sensibilité : le signal indique que le voyant LED s’éteint lorsque le capteur est au-dessus du sol blanc, et le signal LED s’allume lorsque le capteur est au-dessus de la piste noire.
Préparez une piste noire (la largeur de la piste noire doit être comprise entre 20mm et 30mm) en fond blanc. Veuillez noter que l’angle de courbure de la piste ne peut pas être trop prononcé, sinon la voiture sortira de la piste.
Allumez la voiture et placez le milieu du module de capteur de suivi face à la piste noire, puis la voiture se déplacera automatiquement le long de la piste noire.
Paramètres importants dans le fichier de croquis
Réglage de la vitesse du moteur pour de meilleures performances de suivi
Pour obtenir de meilleurs résultats de performance de suivi, la valeur de la puissance du moteur (vitesse) doit être ajustée correctement en fonction du niveau de la batterie. Si la valeur de la puissance (vitesse) du moteur est trop élevée, votre voiture risque de rouler trop vite et de sortir facilement de la piste. Si la puissance du moteur (vitesse) est trop faible, la voiture peut même ne pas bouger.
Pour ajuster la valeur de la puissance du moteur, vous devez modifier les 3 constantes : MID_SPEED, HIGH_SPEED, LOW_SPEED en ligne 14,15,16 dans le fichier sketch m2-lesson3.ino. Leurs valeurs par défaut sont 100, 120, 80, ce qui est bon lorsque les batteries sont complètement chargées.
Lorsque les piles sont faibles, vous devrez peut-être augmenter la valeur de ces 3 constantes. Vous pouvez progressivement ajouter ou réduire 10 à chaque fois sur ces valeurs et comparer les valeurs qui offrent les meilleures performances de suivi.















Could we use the sensor module to have a percent of light and not only 1 or 2?