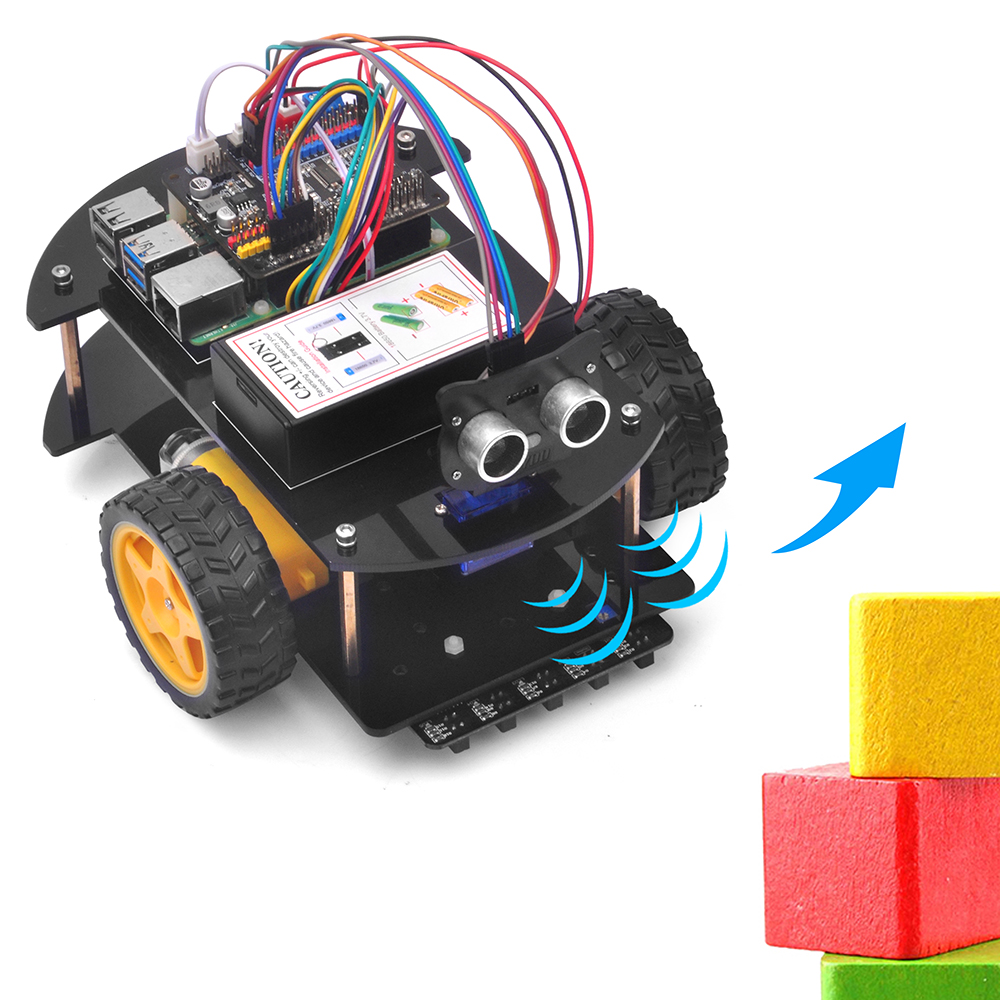
En esta lección, nuestro coche robot Raspberry Pi utilizará un sensor ultrasónico para detectar obstáculos y realizar una conducción automática y evitar colisiones.
Los códigos de ejemplo de este tutorial están escritos en Python.
Paso 1: Debe completar el marco básico de la lección 1. Si ha completado la instalación de hardware de lesson2, guárdelo.
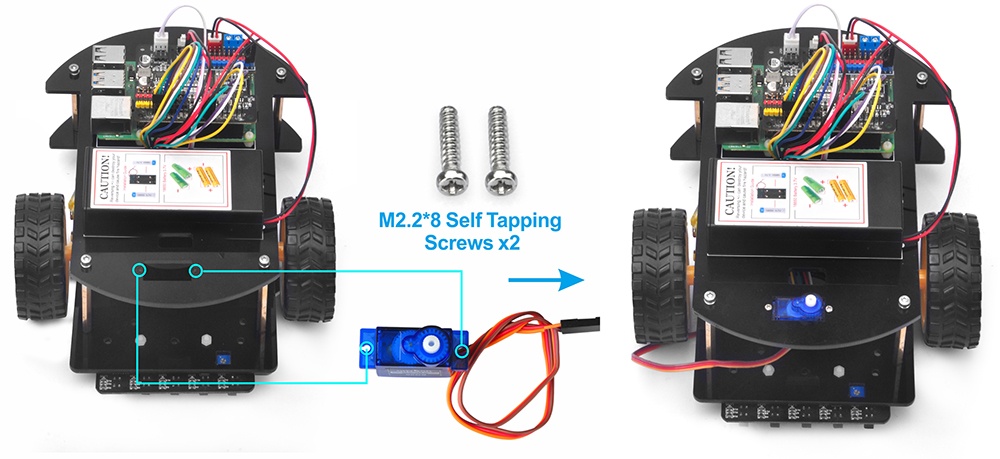
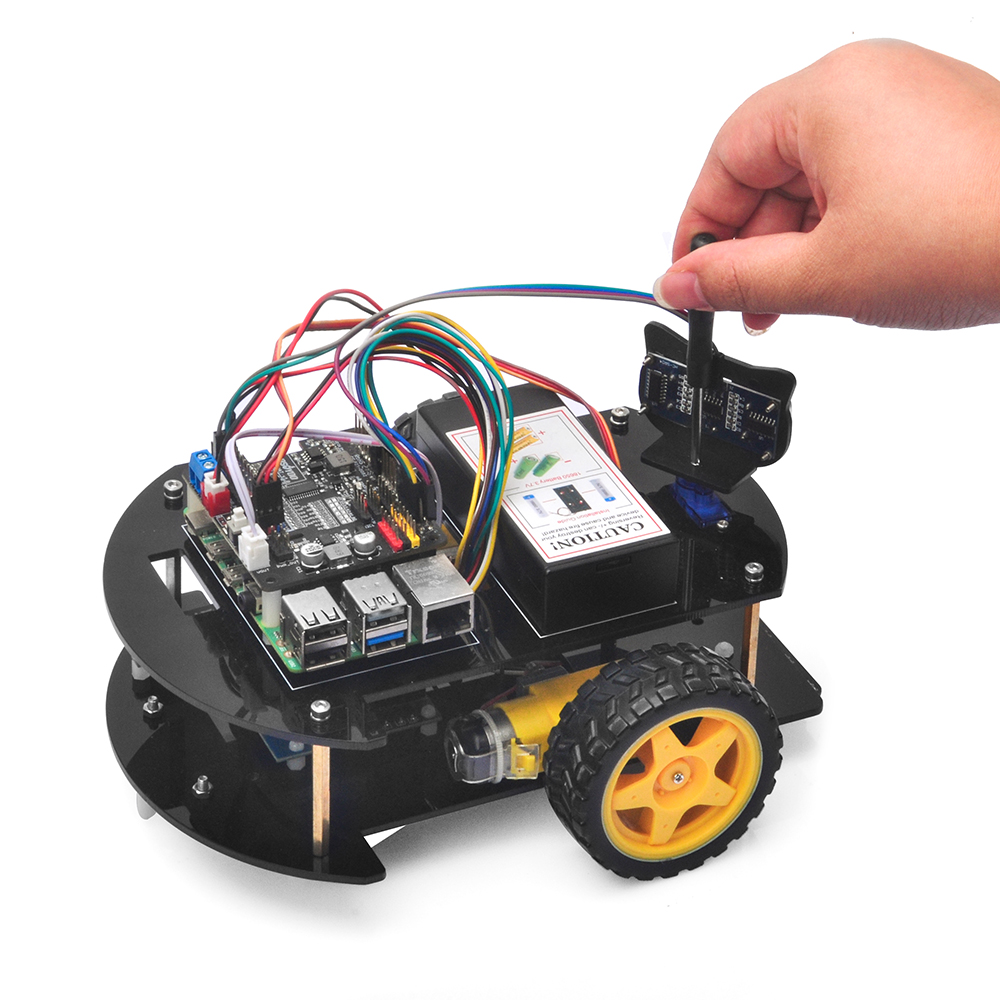
Paso 2: Instale el servomotor en la parte delantera del chasis superior del automóvil con tornillos autorroscantes 2pcs M2.2 * 8
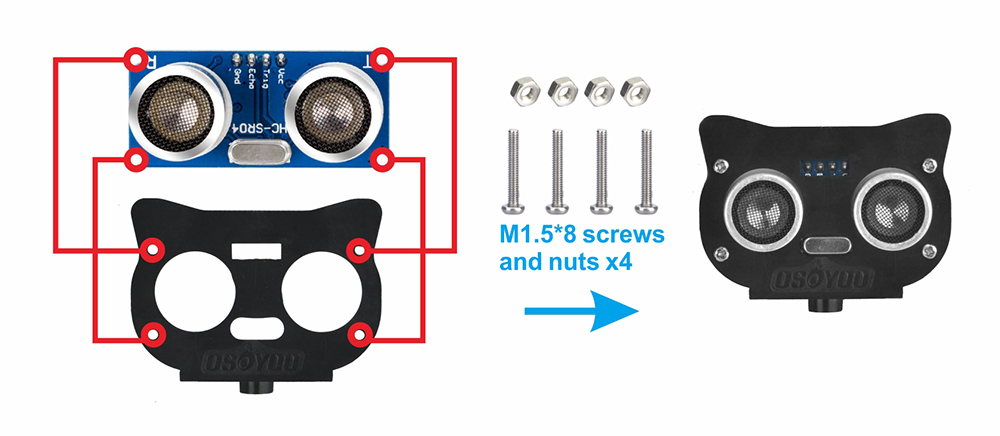
Paso 3: Instale el módulo ultrasónico para montar el soporte con 4pcs M1.5 * 8 tornillo y tuercas M1.5
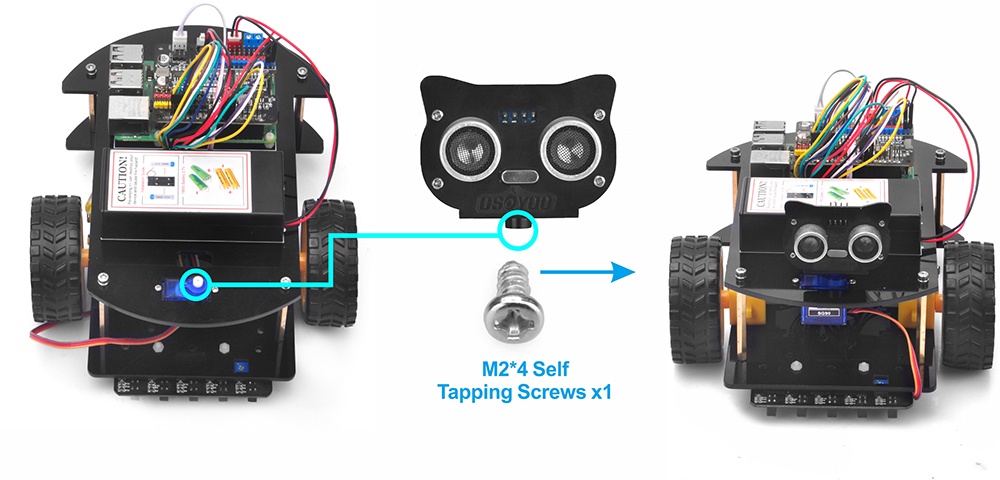
Paso 4: Instale el soporte de montaje para el módulo ultrasónico en el servomotor con tornillo autorroscante M2 * 4
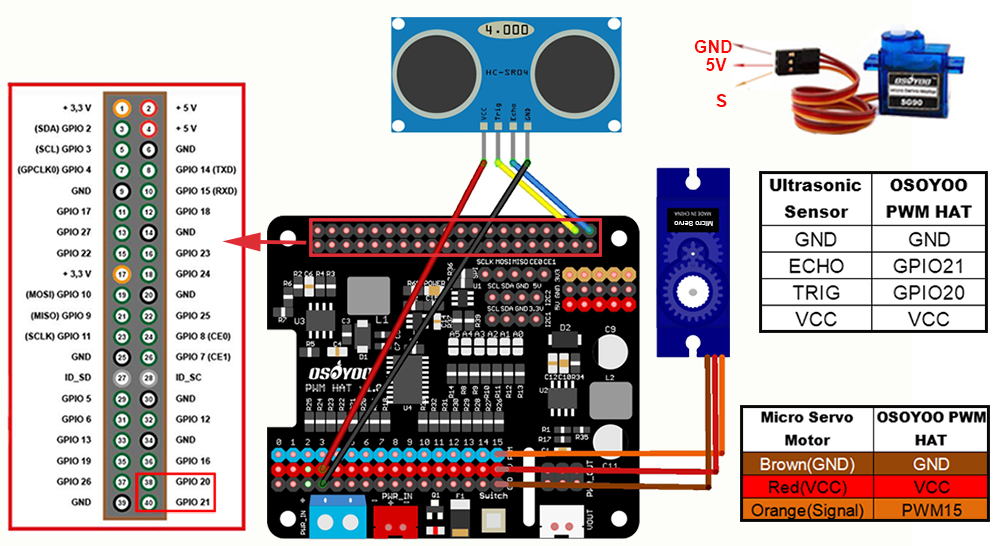
Conecte el servomotor SG90 a PWM 15 , y conecte GND y VCC del módulo ultrasónico a GND y V +, luego conecte TRIG y ECHO del módulo ultrasónico a GPIO20 y GPIO21 como se muestra en el siguiente gráfico (recuerde: NO retire ningún cable existente instalado en la Lección 1):
Paso 1: Asegúrese de haber instalado rpi.gpio, la biblioteca adafruit-pca9685 y habilite I2C en la lección 1.
Paso 2: Encienda el coche robot y descargue el código python escribiendo el siguiente comando en su terminal Raspberry Pi:
Paso 3: Coloque el coche robot en el suelo y ejecute el programa:
python3 picar-obstacle-avoid4.py
Paso 4: Después de ejecutar el último comando, el servomotor hará que el sensor ultrasónico mire hacia la izquierda, luego hacia la derecha, luego hacia el medio y permanezca durante unos segundos. Si el sensor ultrasónico no mira hacia el frente, apague el coche robot inmediatamente. Luego retire el sensor ultrasónico del servo y vuelva a instalarlo, asegúrese de que esté orientado hacia adelante y fíjelo con un tornillo M2 * 4.
Paso 5: Encienda el automóvil nuevamente, escriba el mismo comando python picar-obstacle-avoid.py y ejecute el programa nuevamente. Ahora el automóvil hará automáticamente la conducción automática para evitar obstáculos.