
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

En esta lección instalaremos 2 sensores de distancia IR en un coche robot y programaremos el coche para que siga los movimientos de los objetos. El coche recibe la señal de los sensores de distancia IR, y luego el programa hará que el coche actúe en consecuencia.

Componentes:
Chasis de coche robótico con ruedas Mecanum OSOYOO x1
Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 / ruedas derechas x2)
Placa Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Placa controladora OSOYOO Model Y x1
Voltímetro OSOYOO x1
Sensores de distancia IR OSOYOO x2
Portapilas OSOYOO x1
Cable jumper hembra-hembra de 3 pines OSOYOO x1
Cables jumper hembra-hembra de 6 pines OSOYOO x2
Cable jumper hembra-hembra de 10 pines OSOYOO x1
Cable XH2.54 hembra-hembra de 2 pines OSOYOO x1
Pilas 18650 (3,7 V) x2
Cargador de pilas x1

Paso 1: Instale la estructura básica del coche inteligente según la Lección 1 del Coche Inteligente. Si ya completó la instalación en la Lección 1, manténgala tal como está.
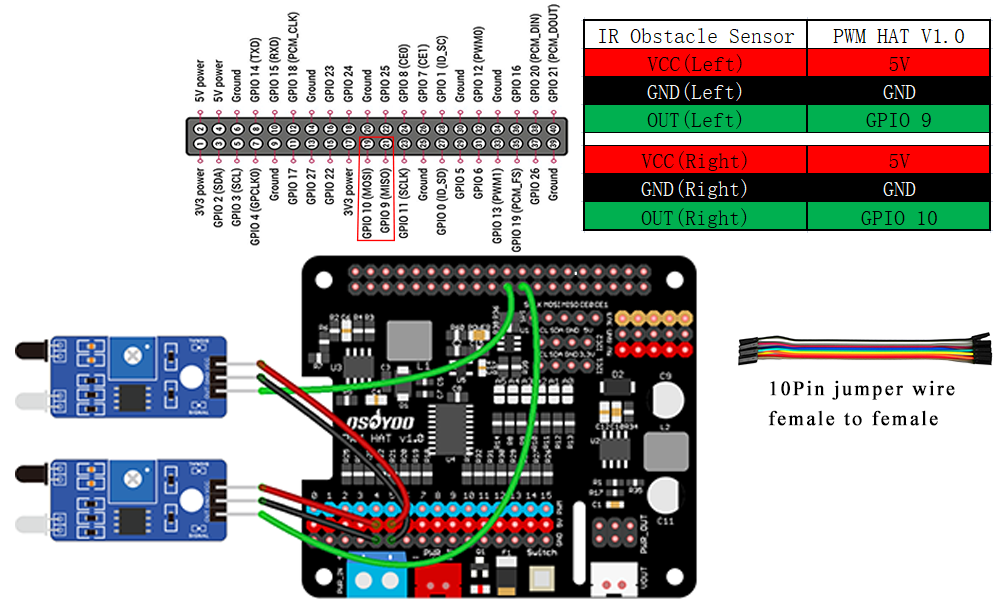
Paso 2: Conecte los 2 módulos de sensores de distancia IR como se muestra en el diagrama de conexión a continuación. (Recuerde: NO retire ningún cable instalado en la Lección 1).

Paso 1 : Asegúrese de haber instalado las bibliotecas rpi.gpio y PCA9685 y haber habilitado I2C en la Lección 1.
Paso 2: Encienda el coche robot, utilice herramientas SSH para descargar el código Python escribiendo el siguiente comando en la terminal de Raspberry Pi:
wget https://osoyoo.com/driver/mecanum/follower5.py
python follower5.py
Paso 3: Coloque un objeto a unos 10 cm delante de cada sensor de distancia IR y ajuste el potenciómetro en los sensores de distancia IR para detectar el objeto o su mano.
Mueva el objeto o su mano delante del coche, y el coche se moverá en consecuencia: parece que lo está tirando. Avanza cuando ambos módulos de evitación de obstáculos IR detectan el objeto o su mano; gira a la derecha cuando el módulo de evitación de obstáculos IR derecho detecta el objeto; gira a la izquierda cuando el sensor de distancia IR izquierdo detecta el objeto.
Cuando el objeto o su mano están a más de 10 cm de distancia, el coche se detendrá.
Nota: Cuando estos módulos IR detectan objetos, tanto el indicador de alimentación como el de señal están encendidos. Cuando no se detecta ningún objeto, solo el indicador de alimentación está encendido, el de señal está apagado. Si el indicador de señal permanece siempre encendido incluso sin obstáculos delante del sensor, debe ajustar el potenciómetro.
Note: When these IR modules detect objects, both the power indicator and signal indicator are on. When No object is detected, only power indicator is on, signal indicator is off. If the signal indicator is always on even though there is no obstacle in front of the sensor, you need to adjust the potentiometer.

Ejecute el siguiente comando en la terminal SSH:
python follower5.py








