
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In dieser Lektion installieren wir 2 IR-Abstandssensoren an einem Roboterauto und programmieren das Auto, um Bewegungen von Objekten zu verfolgen. Das Auto empfängt das Signal von den IR-Abstandssensoren, und das Programm steuert dann die entsprechenden Aktionen des Autos.

Komponenten:
OSOYOO Mecanum-Rad Roboterauto-Chassis x1
OSOYOO Räder und Motoren x4 (Linksräder x2 / Rechtsräder x2)
Raspberry Pi 4B-Platine
OSOYOO PWM HAT Shield x1
OSOYOO Model Y Treiberplatine x1
OSOYOO Spannungsmesser x1
OSOYOO IR-Abstandssensoren x2
OSOYOO Batteriebox x1
OSOYOO 3-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO 6-polige Jumperkabel (weiblich-weiblich) x2
OSOYOO 10-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO XH2.54 2-poliges Kabel (weiblich-weiblich) x1
18650-Batterien (3,7 V) x2
Batterieladegerät x1

Schritt 1: Installieren Sie das Grundgerüst des Smart Cars gemäß Smart Car Lektion 1. Falls Sie die Installation bereits in Lektion 1 abgeschlossen haben, belassen Sie alles unverändert.
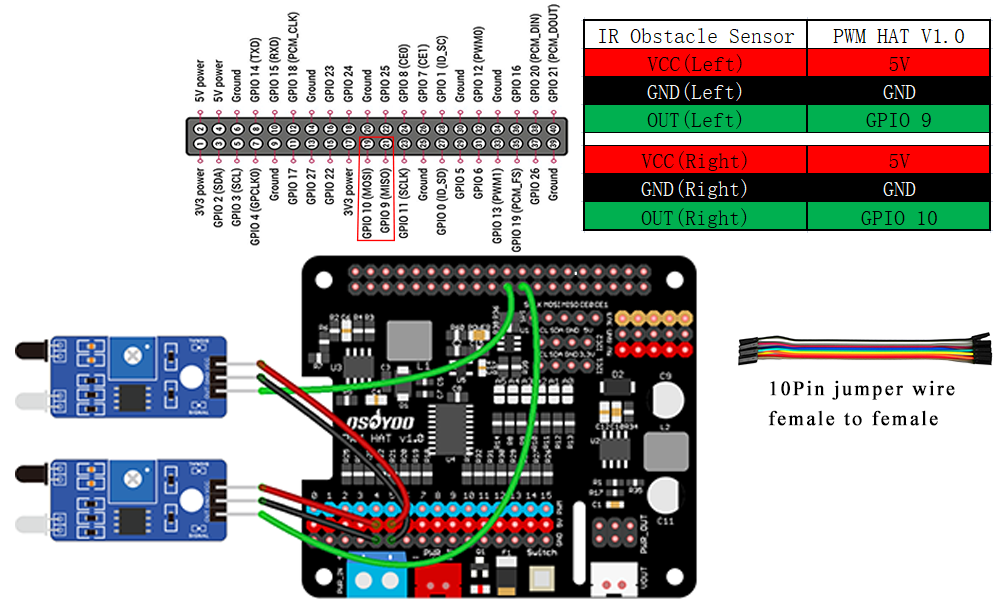
Schritt 2: Verbinden Sie die 2 IR-Abstandssensormodule gemäß dem untenstehenden Anschlussdiagramm. (Erinnerung: Entfernen Sie KEINE bereits in Lektion 1 installierten Kabel).

Schritt 3: Stellen Sie sicher, dass Sie in Lektion 1 die Bibliotheken rpi.gpio und PCA9685 installiert und I2C aktiviert haben.
Schritt 4: Schalten Sie das Roboterauto ein und verwenden Sie SSH-Tools, um den Python-Code herunterzuladen, indem Sie den folgenden Befehl im Raspberry Pi Terminal eingeben:
wget https://osoyoo.com/driver/mecanum/follower5.py
python follower5.py
Schritt 5: Platzieren Sie ein Objekt etwa 10 cm vor jedem IR-Abstandssensor und stellen Sie den Potentiometer an den IR-Abstandssensoren so ein, dass er das Objekt oder Ihre Hand erkennt.
Bewegen Sie das Objekt oder Ihre Hand vor dem Auto, und das Auto bewegt sich entsprechend: Es sieht aus, als würden Sie es ziehen. Es fährt vorwärts, wenn beide IR-Hindernisvermeidungsmodule ein Objekt oder Ihre Hand erkennen; es dreht nach rechts, wenn das rechte IR-Hindernisvermeidungsmodul ein Objekt erkennt; es dreht nach links, wenn der linke IR-Abstandssensor ein Objekt erkennt.
Wenn das Objekt oder Ihre Hand mehr als 10 cm entfernt ist, hält das Auto an.
Hinweis: Wenn diese IR-Module Objekte erkennen, leuchten sowohl die Stromversorgungs- als auch die Signal-LED. Wenn kein Objekt erkannt wird, leuchtet nur die Stromversorgungs-LED, die Signal-LED ist aus. Wenn die Signal-LED ständig leuchtet, obwohl sich kein Hindernis vor dem Sensor befindet, müssen Sie den Potentiometer anpassen.

Führen Sie den folgenden Befehl im SSH-Terminal aus:
python follower5.py








