
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

Dans cette leçon, nous installerons 2 capteurs de distance IR sur une voiture robot et programmerons la voiture pour qu’elle suive les mouvements des objets. La voiture reçoit le signal des capteurs de distance IR, puis le programme dirige la voiture pour qu’elle agisse en conséquence.

Composants :
Châssis de voiture robotique à roues Mecanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauche x2 / roues droite x2)
Carte Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Carte de contrôle OSOYOO Model Y x1
Voltmètre OSOYOO x1
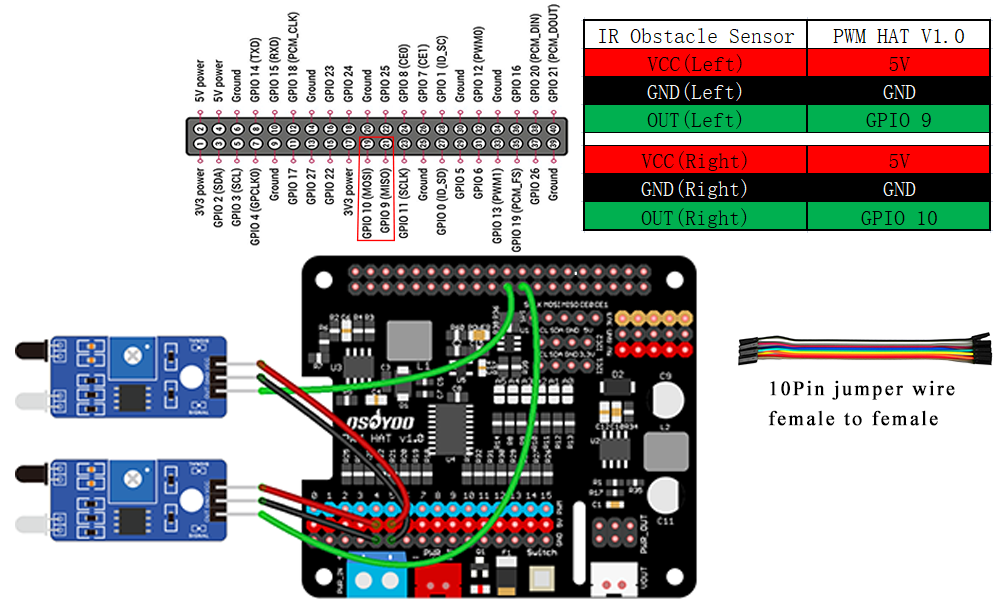
Capteurs de distance IR OSOYOO x2
Boîtier à piles OSOYOO x1
Câble jumper femelle-femelle 3 broches OSOYOO x1
Câbles jumper femelle-femelle 6 broches OSOYOO x2
Câble jumper femelle-femelle 10 broches OSOYOO x1
Câble XH2.54 femelle-femelle 2 broches OSOYOO x1
Piles 18650 (3,7 V) x2
Chargeur de piles x1

Étape 1 : Installez la structure de base de la voiture intelligente comme dans la Leçon 1 de la Voiture Intelligente. Si vous avez déjà terminé l’installation dans la Leçon 1, conservez tout tel quel.
Étape 2 : Connectez les 2 modules de capteurs de distance IR comme indiqué dans le schéma de connexion ci-dessous. (Rappel : NE retirez AUCUN câble installé dans la Leçon 1).

Étape 3 : Assurez-vous d’avoir installé les bibliothèques rpi.gpio et PCA9685 et activé I2C dans la Leçon 1.
Étape 4: Allumez la voiture robot, utilisez les outils SSH pour télécharger le code Python en tapant la commande suivante dans le terminal du Raspberry Pi :
wget https://osoyoo.com/driver/mecanum/follower5.py
python follower5.py
Étape 5 : Placez un objet à environ 10 cm devant chaque capteur de distance IR et ajustez le potentiomètre sur les capteurs de distance IR pour détecter l’objet ou votre main.
Déplacez l’objet ou votre main devant la voiture, et la voiture se déplacera en conséquence : elle semble être tirée. Elle avance lorsque les deux modules d’évitement d’obstacles IR détectent l’objet ou votre main ; elle tourne à droite lorsque le module d’évitement d’obstacles IR droit détecte l’objet ; elle tourne à gauche lorsque le capteur de distance IR gauche détecte l’objet.
Lorsque l’objet ou votre main se trouve à plus de 10 cm de distance, la voiture s’arrête.
Note : Lorsque ces modules IR détectent des objets, l’indicateur d’alimentation et l’indicateur de signal sont tous deux allumés. Lorsqu’aucun objet n’est détecté, seul l’indicateur d’alimentation est allumé, l’indicateur de signal est éteint. Si l’indicateur de signal reste toujours allumé même en l’absence d’obstacle devant le capteur, vous devez ajuster le potentiomètre.
.

Exécutez la commande suivante dans le terminal SSH:
python follower5.py








