
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In questa lezione installeremo 2 sensori di distanza IR su un’auto robot e programmeremo l’auto per seguire i movimenti degli oggetti. L’auto riceve il segnale dai sensori di distanza IR, e il programma guiderà l’auto ad agire di conseguenza.

Componenti:
Chassis auto robotica con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistra x2 / ruote destra x2)
Scheda Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Scheda di controllo OSOYOO Model Y x1
Voltmetro OSOYOO x1
Sensori di distanza IR OSOYOO x2
Portabatterie OSOYOO x1
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavi jumper femmina-femmina a 6 pin OSOYOO x2
Cavo jumper femmina-femmina a 10 pin OSOYOO x1
Cavo XH2.54 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3,7V) x2
Caricabatterie x1

Passo 1: Installare la struttura base dell’auto intelligente come nella Lezione 1 dell’Auto Intelligente. Se avete già completato l’installazione nella Lezione 1, mantenete tutto così com’è.
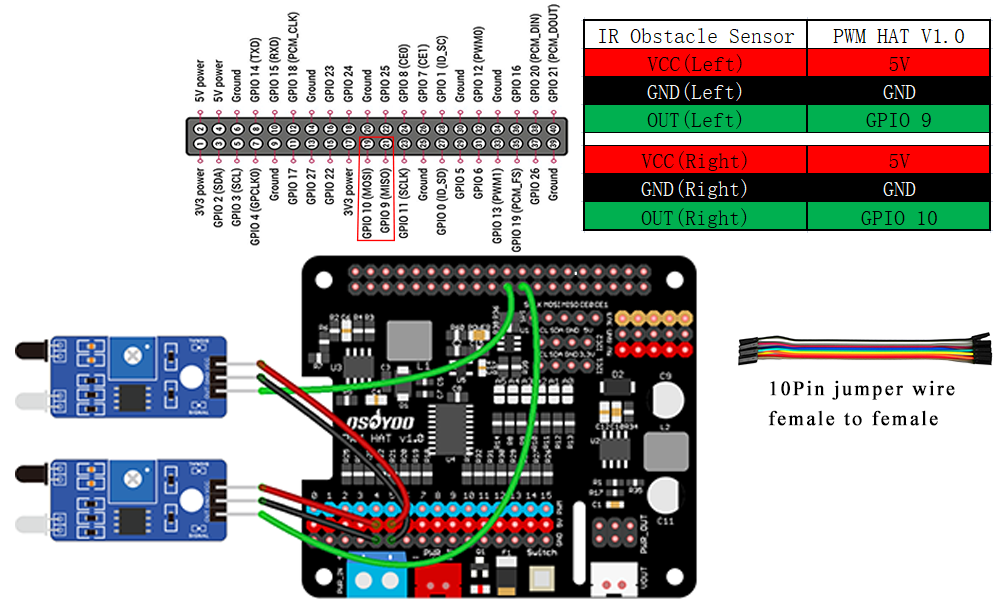
Passo 2: Collegare i 2 moduli sensori di distanza IR come nello schema di connessione sottostante. (Ricordate: NON rimuovete alcun cavo installato nella Lezione 1).

Passo 3: Assicuratevi di aver installato le librerie rpi.gpio e PCA9685 e di aver abilitato I2C nella Lezione 1.
Passo 4: Accendere l’auto robot, utilizzare gli strumenti SSH per scaricare il codice Python digitando il seguente comando nel terminale del Raspberry Pi:
wget https://osoyoo.com/driver/mecanum/follower5.py
python follower5.py
Passo 5: Posizionare un oggetto a circa 10 cm davanti a ciascun sensore di distanza IR e regolare il potenziometro sui sensori di distanza IR per rilevare l’oggetto o la vostra mano.
Muovere l’oggetto o la vostra mano davanti all’auto, e l’auto si muoverà di conseguenza: sembrerà che la stiate trainando. Avanza quando entrambi i moduli di evitamento ostacoli IR rilevano l’oggetto o la mano; gira a destra quando il modulo di evitamento ostacoli IR destro rileva l’oggetto; gira a sinistra quando il sensore di distanza IR sinistro rileva l’oggetto.
Quando l’oggetto o la mano sono a più di 10 cm di distanza, l’auto si fermerà.
Nota: Quando questi moduli IR rilevano oggetti, sia l’indicatore di alimentazione che quello di segnale sono accesi. Quando non viene rilevato alcun oggetto, solo l’indicatore di alimentazione è acceso, quello di segnale è spento. Se l’indicatore di segnale rimane sempre acceso anche senza ostacoli davanti al sensore, è necessario regolare il potenziometro.

Eseguire il seguente comando nel terminale SSH:
python follower5.py








