En esta lección agregaremos un módulo de sensor de seguimiento de 5 canales en blanco y negro al marco construido en la Lección 1. Si no ha completado la instalación en la Lección 1, revise la Lección 1.
El código de esta lección leerá los datos de este módulo de sensor de seguimiento en blanco y negro de 5 canales y guiará automáticamente al auto robot inteligente para que se mueva siguiendo la línea negra en el fondo blanco.
Partes y dispositivos
No.
Imagen
Dispositivo
Cant.
Accesorios
Comprar
1
Módulo sensor de seguimiento
1
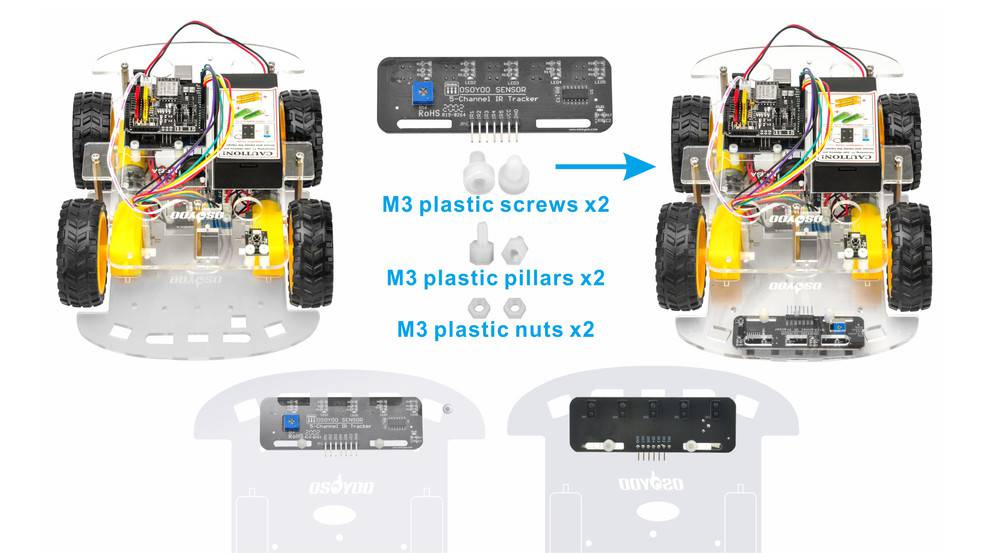
Tornillo plástico M3 x 2
Tuerca plástica
Tornillo plástico M3 x 2
Instalación del hardware Paso 1: instalación del pin del módulo controlador del motor Modelo X. Inicie la instalación desde el estado anterior de Auto Robot Inteligente Lección 1. Si ha instalado la Lección 2 o 3, puede quitar los cables para ahorrar energía.
Paso 2: instale los módulos del sensor de seguimiento debajo del chasis inferior del robot con 2 tornillos de plástico M3, tornillos hexagonales de plástico M3 y tuercas de plástico M3.
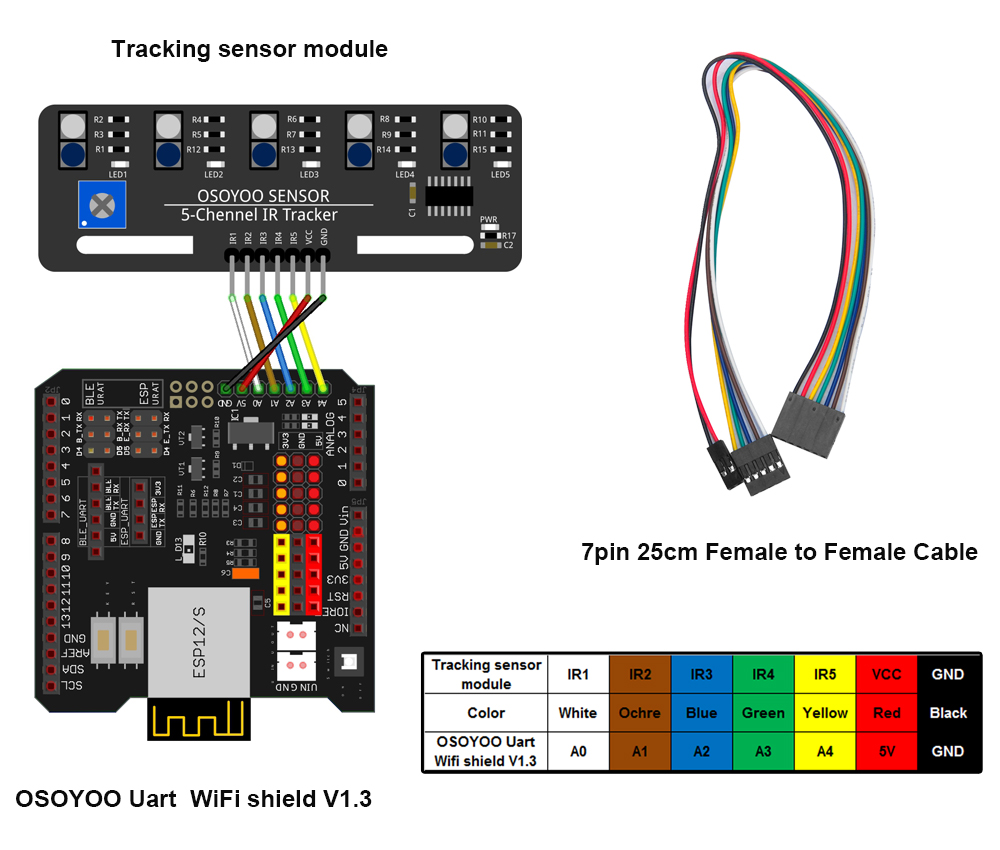
Paso 3: conecte el pin GND-VCC del módulo del sensor de seguimiento del escudo OSOYOO Uart WiFi V1.3 a GND-5V; luego conecte los pines: IR1, IR2, IR3, IR4, IR5 a A0, A1, A2, A3, A4 respectivamente con un cable hembra a hembra de 7 pines y 25 cm como se muestra en la siguiente foto (Recuerde: NO retire ningún cable existente instalado en la Lección 1):
Paso 1: instale el IDE más reciente (si tiene una versión de IDE posterior a la 1.1.16, omita este paso). Descargue el IDE desde https://www.arduino.cc/en/Main/Software?setlang=en y luego instale el software.
Paso 2: descargue el código de muestra de seguimiento del auto robot inteligente de la Lección 4 de v2smartcar-lesson4 , descomprima el archivo zip de descarga smartcar-lesson4.zip, verá una carpeta llamada smartcar-lesson4B.
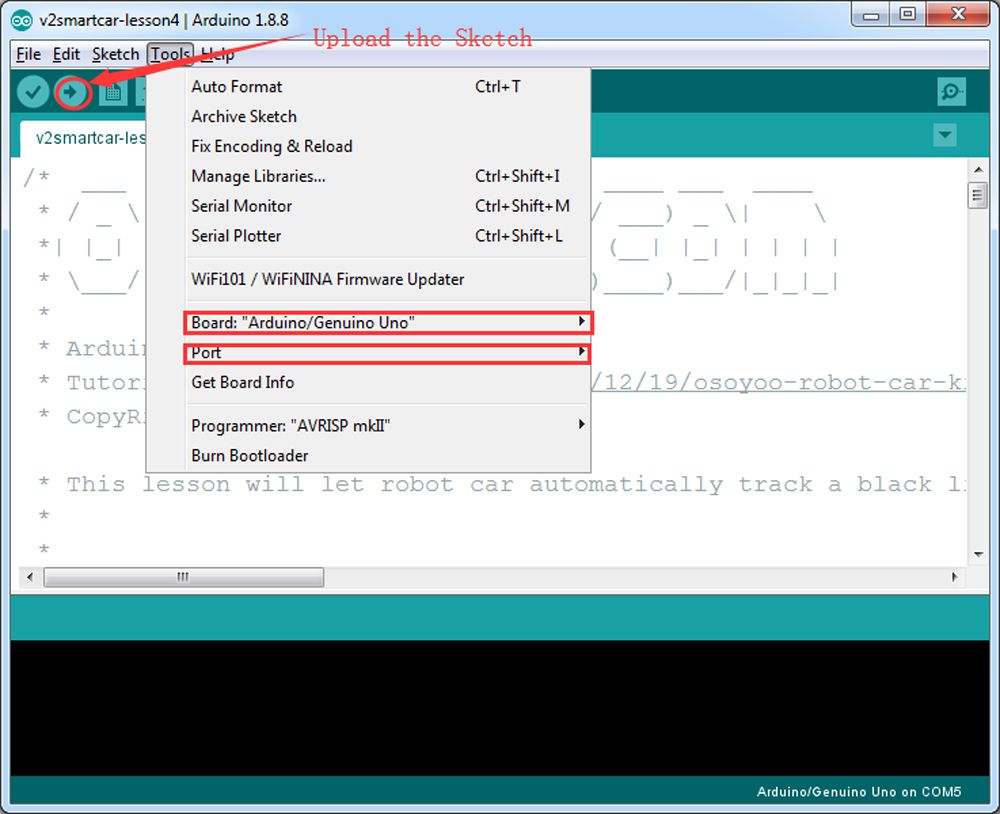
Paso 3: conecte la placa básica OSOYOO a la PC con un cable USB, abra el IDE -> haga clic en Archivo -> haga clic en Abrir -> elija el código “smartcar-lesson4.ino” en la carpeta smartcar-lesson4 y cargue el código en su placa.
Paso 4: elija la placa/puerto correspondiente para su proyecto y cargue el código en la placa.
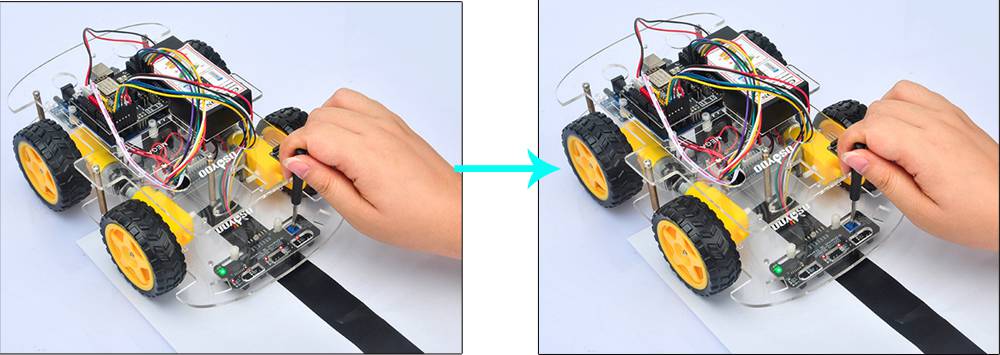
Paso 5: ajuste la sensibilidad de los módulos del sensor de seguimiento. Encienda y sostenga el auto y ajuste el potenciómetro en el sensor de seguimiento con un destornillador Philips hasta que obtenga el mejor estado de sensibilidad: la señal indica que la luz LED se encenderá cuando el sensor esté por encima de la pista negra y la señal LED se apagará cuando el sensor está sobre la línea blanca.
Pruebas
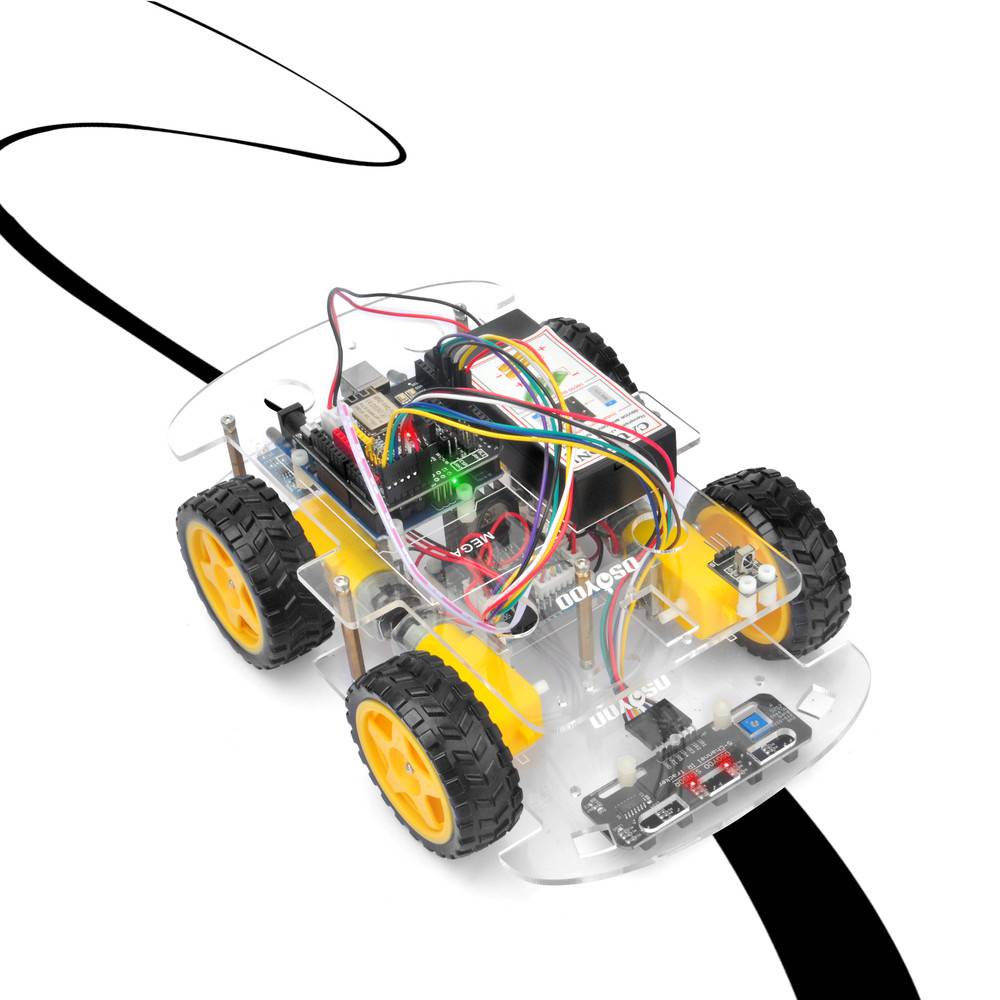
Prepare una línea negra en fondo blanco (el ancho de la línea negra es más de 20 mm y menos de 30 mm). Tenga en cuenta que el ángulo de curvatura de la pista no puede ser superior a 90 grados, si el ángulo es demasiado grande entonces el robot saldrá de la pista.
Encienda el auto robot y coloque el centro del módulo del sensor de seguimiento sobre la pista negra y luego el auto se moverá a lo largo de la línea negra.