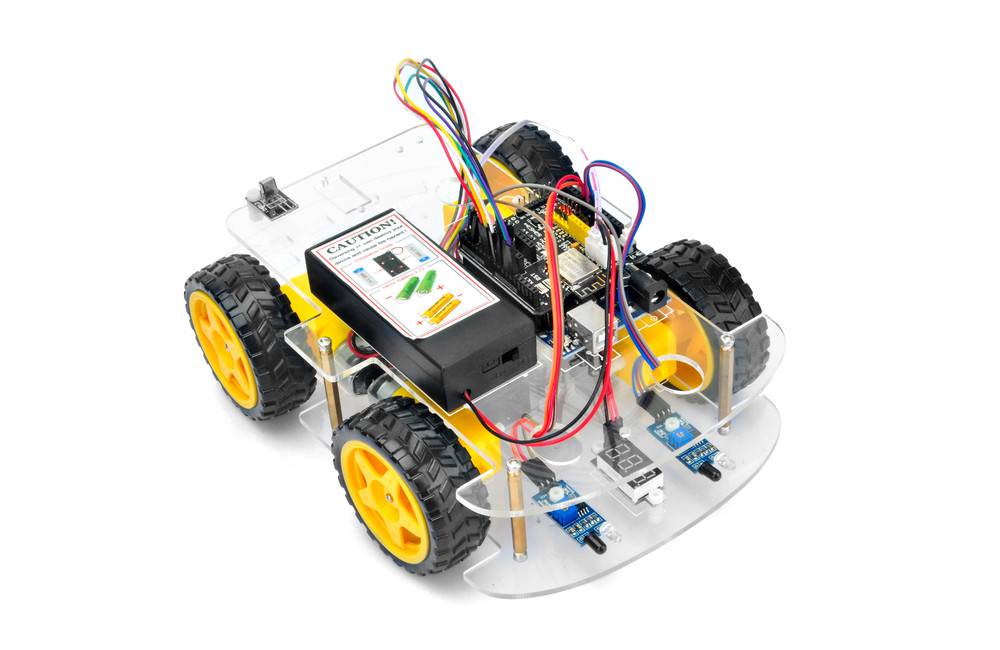
En esta lección instalaremos 2 sensores de distancia IR en el auto robot y programaremos el robot para seguir los movimientos de los objetos. El principio de este experimento se basa en el principio de detección de distancia IR. El auto recibe la señal de los sensores de distancia IR y luego el programa conducirá el auto robot para tomar medidas.
Debe completar la Lección 1 (ensamblar el autol) antes de continuar con esta lección.
Partes y dispositivos
No.
Imagen
Dispositivo
Cant.
Accesorios
Comprar
1
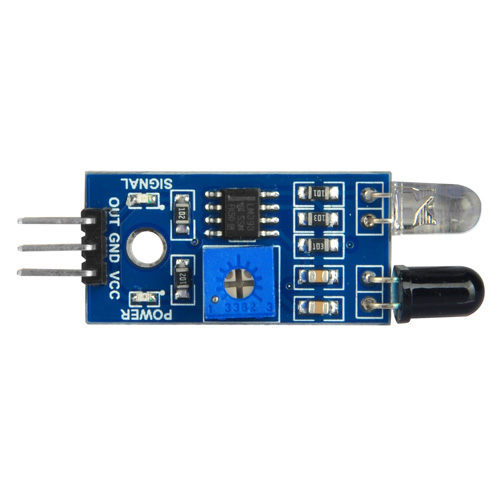
Sensor de distancia IR
2
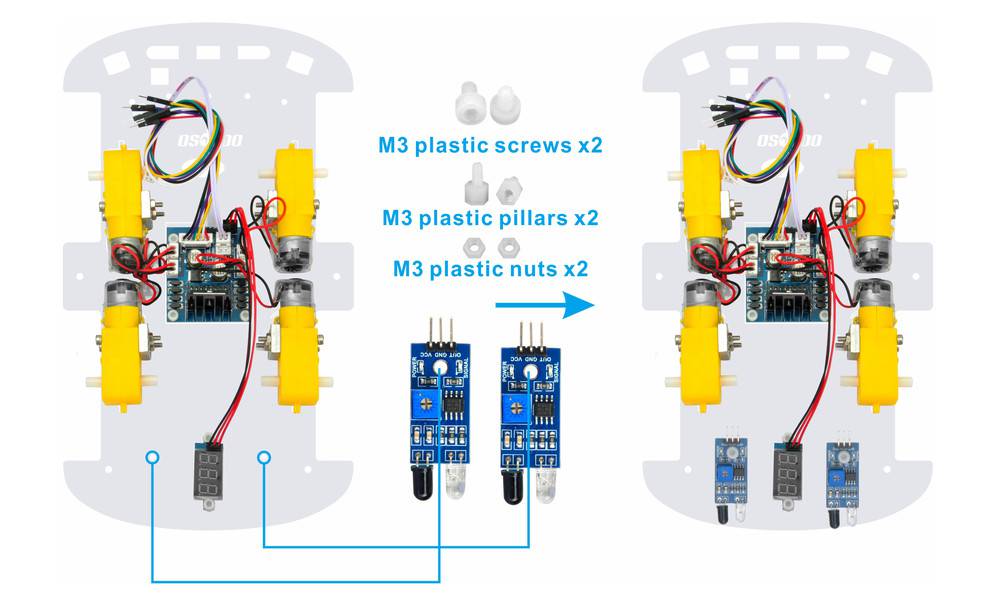
Tornillo plástico M3 x 2
Tuerca plástica M3 x 2
Tornillo plástico M3 x 2
Paso 1 : instale el marco básico del auto robot inteligente según la Lección 1 del robot inteligente. Si ya completó la instalación en la Lección 1, simplemente manténgala como está.
Paso 2 : retire los tornillos de los separadores de cobre y agregue los 2 sensores de distancia IR al auto robot. Instale los sensores de distancia IR con 2 tornillos de plástico M3, tornillos de plástico M3 y tuercas de plástico M3 en la parte trasera del chasis inferior del robot.
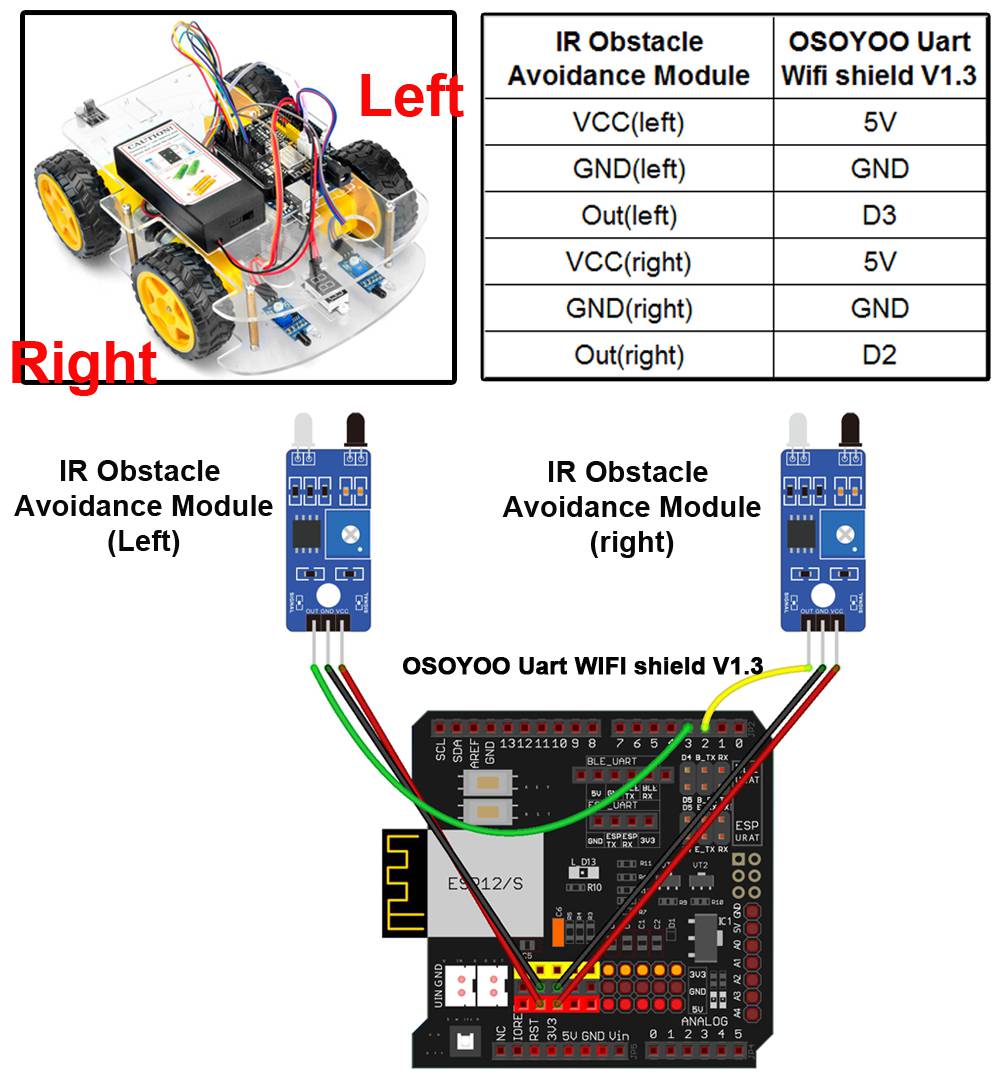
Paso 3 : conecte los 2 módulos de sensores de distancia IR como se muestra a continuación en el diagrama de conexión (recuerde: NO retire ningún cable existente instalado en la Lección 1) :
Paso 4 : fije los tornillos en los separadores de cobre para conectar el chasis superior al chasis inferior.
Paso 1: instale el IDE más reciente (si tiene una versión de IDE posterior a la 1.1.16, omita este paso). Descargue IDE de https://www.arduino.cc/en/Main/Software?setlang=en y luego instale el software.
Paso 2: descargue el código de muestra de la Lección 1 desde https://osoyoo.com/driver/v2smartcar-lesson3.zip , descomprima el archivo zip de descarga (v2smartcar-lesson3.zip), verá una carpeta llamada v2smartcar-lesson3.
Paso 3: conecte la placa básica OSOYOO a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código “v2smartcar-lesson3.ino” en la carpeta v2smartcar-lesson3 y cargue el código en su placa.
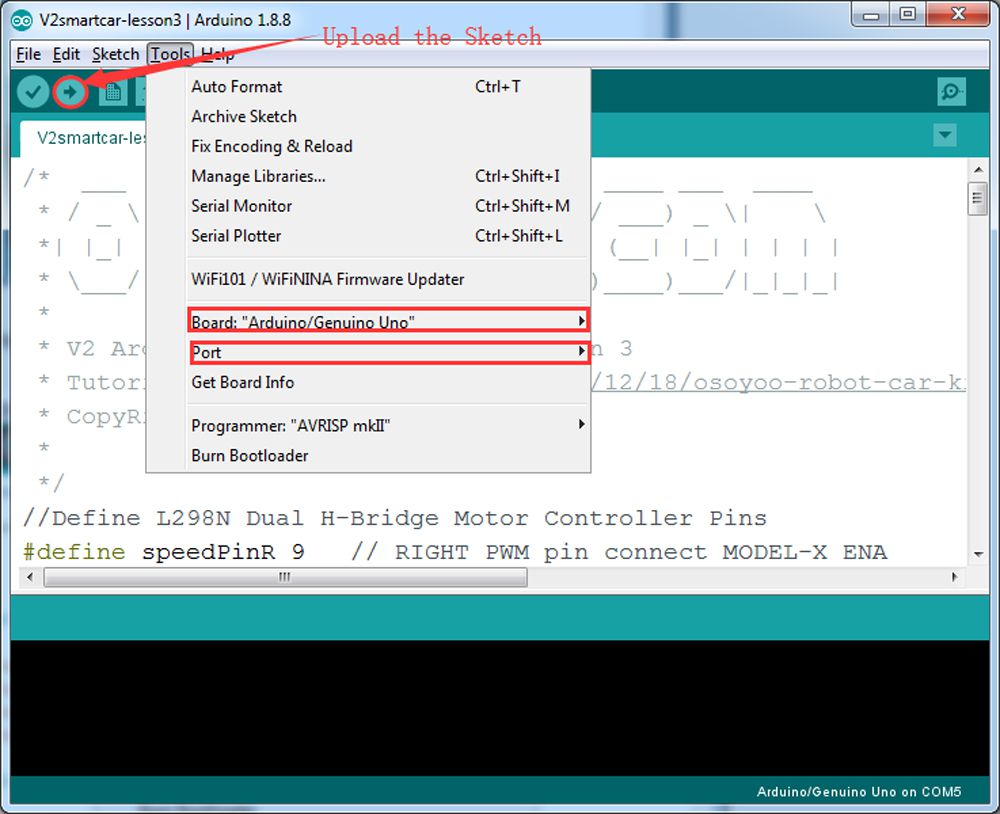
Paso 4: elija la placa/puerto correspondiente para su proyecto y cargue el código en la placa.
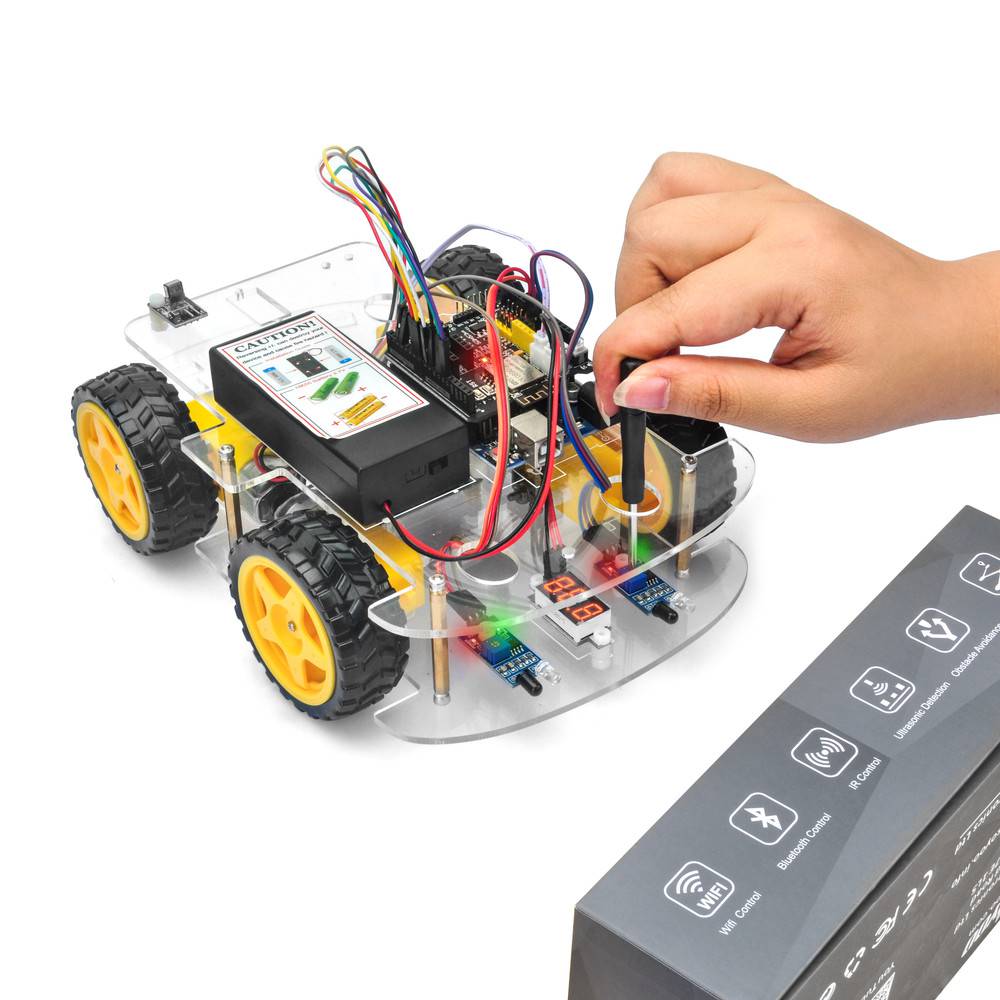
Paso 5: encienda el auto, coloque el objeto unos 10 cm por delante de cada sensor de distancia IR y ajuste el potenciómetro en los sensores de distancia IR para detectar el objeto o su mano.
Nota: cuando estos módulos detectan objetos, el indicador de encendido y el indicador de señal están encendidos. Cuando mueva el objeto sobre la distancia de detección, el indicador de encendido está encendido. Si el indicador de señal siempre está encendido aunque el objeto esté por encima de la distancia de detección, también debe ajustar el potenciómetro.
Pruebas finales
Encienda el auto robot, mueva el objeto o su mano por delante del automóvil y luego el robot se moverá en consecuencia como si lo tirara. Avanza cuando ambos módulos para evitar obstáculos IR detectan un objeto o su mano; luego gira a la derecha cuando los módulos para evitar obstáculos IR detectan un objeto; gira a la izquierda cuando los sensores de distancia IR izquierdos detectan un objeto y se detendrá cuando el objeto o su mano estén a más de 10 cm por delante.
Nota:
1) Cuando los módulos de sensores de distancia IR están instalados en la parte trasera del automóvil, todas las direcciones de movimiento son contrarias a otros cursos.
2) El auto robot sólo puede avanzar, girar a la derecha y girar a la izquierda pero no puede retroceder.
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help



















Hello, the object sensors are very weak. I have to put a paper about 2 cm to the car to detect it. Any suggestions ?
you can adjust the sensitivity potentiometer with a screwdriver. see this https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson3/3.jpg
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
Can someone please help me order replacements?
Oh, good grief. Never mind. I completely failed to notice the “click here to buy” link next to the parts list above.
OK, If you get any issue, please contact me again. Thanks.
Hi,
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
Kelvin.
Does the saftware notice successfully?
Pleas confirm you download the lesson 2 IR remote car or this commented lesson(lesson3).
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
Thank you. Your interest and support make us progress
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
Please provide your order No. and address, I’ll send the IR to you ASAP.
I have had this same problem have you managed to sort it out or is a new part needed?
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help
Is one of the sensers suppose to have gunk on it?
Why do you ask such question? Our sensors should be brand new and clean in the package.