Dans cette leçon, nous ajouterons un module de capteur de suivi noir/blanc à 5 canaux au cadre construit dans la leçon 1. Si vous n’avez pas terminé l’installation de la leçon 1. Veuillez revoirla leçon 1
Le logiciel de cette leçon lira les données de ces modules de capteurs de suivi noir/blanc à 5 canaux et guidera automatiquement la voiture intelligente pour qu’elle se déplace le long de la ligne de piste noire sur le sol blanc.
Pièces et dispositifs:
fr/
Nombre
Photo
Dispositif
Quatité
Accessoires
Acheter en lien
1
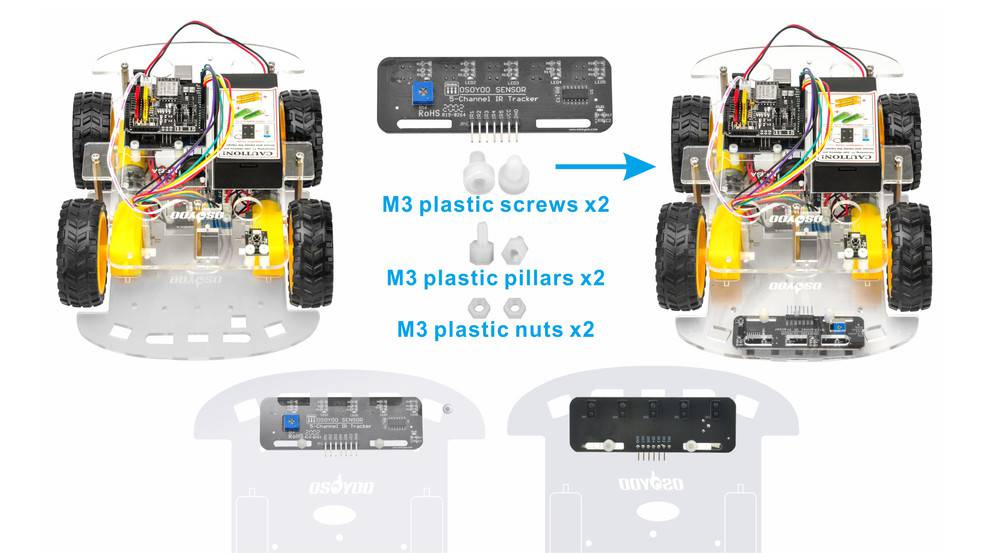
Module de capteur de suivi
1
Vis en plastique M3 x 2
Pilier en plastique M3 x 2
Ecrou plastique M3 x 2
Installation du matériel: Étape 1: Installation des broches du circuit d’attaque du moteur (modèle X).
Commencez l’installation à partir de l’état précédent de la leçon 1 de Smart Car . Si vous avez installé la leçon 2 ou 3, vous devez retirer les fils que vous avez connectés dans la leçon 2 et la leçon 3.
Étape 2: Installer les modules de capteurs de suivi sous le châssis inférieur de la voiture à l’aide de 2 vis plastiques M3, de piliers plastiques M3 et d’écrous plastiques M3.
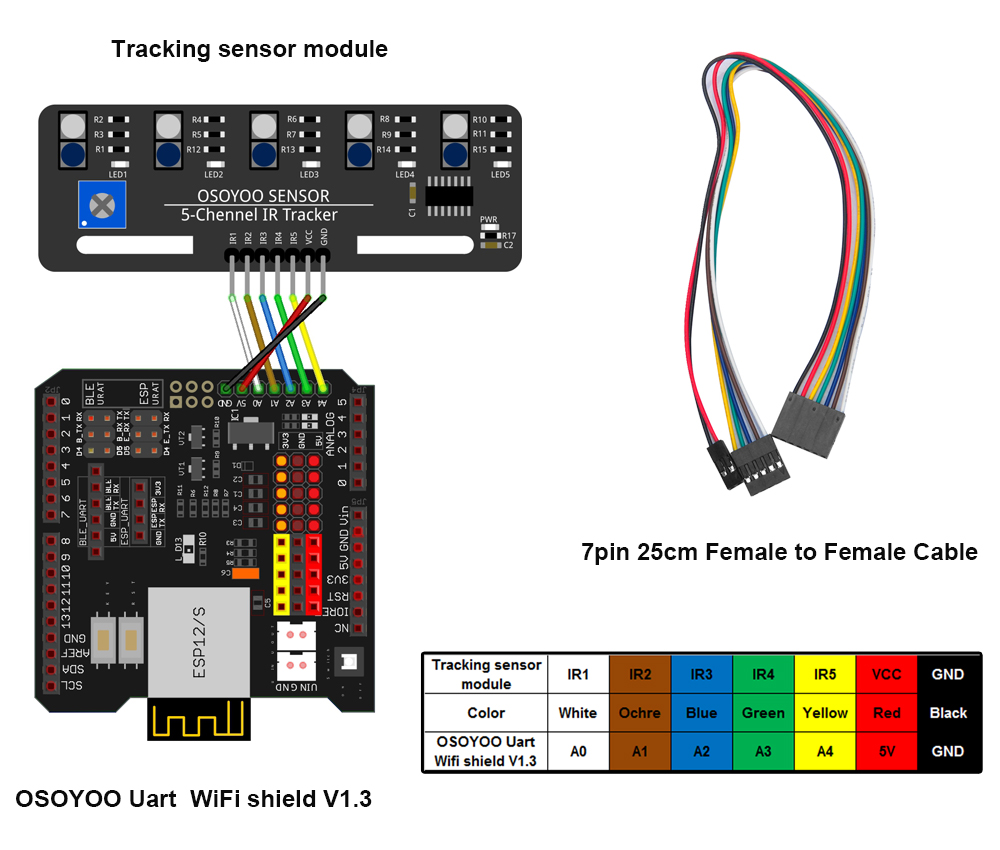
Étape 3: Connectez la broche GND-VCC du module du capteur de suivi à GND-5V du bouclier OSOYOO Uart WiFi V1.3 ; connectez les broches IR1, IR2, IR3, IR4, IR5 à A0, A1, A2, A3, A4 avec un câble femelle-femelle à 7 broches de 25 cm, comme le montre la photo ci-dessous.(Rappel : NE PAS enlever les fils existants installés lors de la leçon 1.):
Étape 1: Installer la dernière version de l’IDE (Si vous avez une version de l’IDE postérieure à 1.1.16, veuillez sauter cette étape). Télécharger l’IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en , puis installer le logiciel.
Étape 2: Télécharger l’exemple de code de la leçon 4 sur le suivi de la voiture intelligente à partir dev2smartcar-lesson4 , décompressez le fichier zip de téléchargement smartcar-lesson4.zip, vous verrez un dossier appelé smartcar-lesson4B.
Étape 3: Connectez votre carte au PC avec un câble USB, ouvrez l’IDE -> cliquez sur file -> cliquez sur Open -> choisissez le code “smartcar-lesson4.ino” dans le dossier smartcar-lesson4, chargez le code dans votre carte..
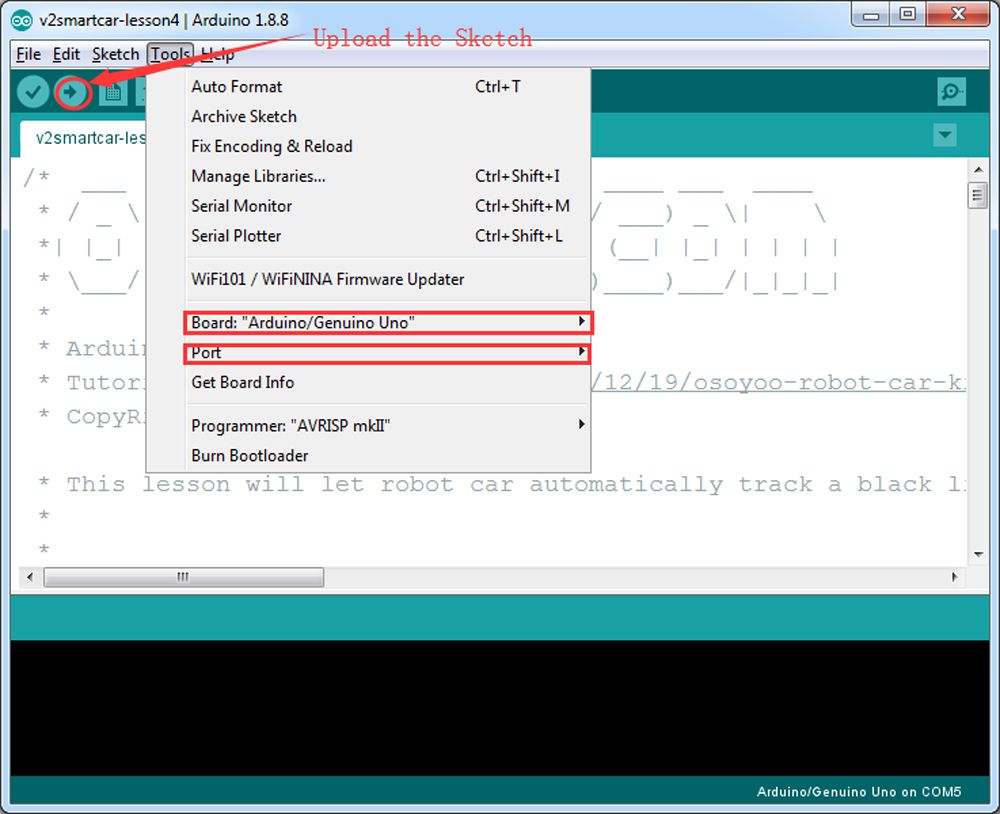
Étape 4: Choisissez la carte/le port correspondant à votre projet et téléchargez l’esquisse sur la carte.
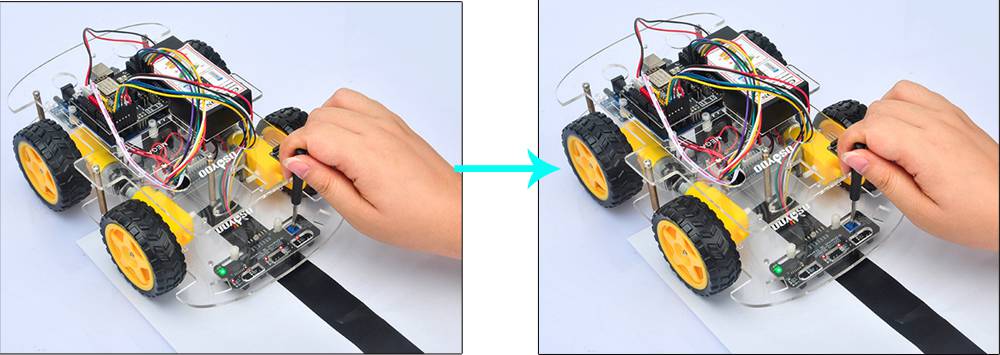
Étape 5: Réglez la sensibilité des modules du capteur de suivi. Mettez la voiture en marche, maintenez-la et réglez le potentiomètre du capteur de suivi à l’aide d’un tournevis Philips jusqu’à ce que vous obteniez le meilleur état de sensibilité : la LED indiquant le signal s’allume lorsque le capteur se trouve au-dessus d’une piste noire, et la LED s’éteint lorsque le capteur se trouve au-dessus d’un sol blanc.
Essais:
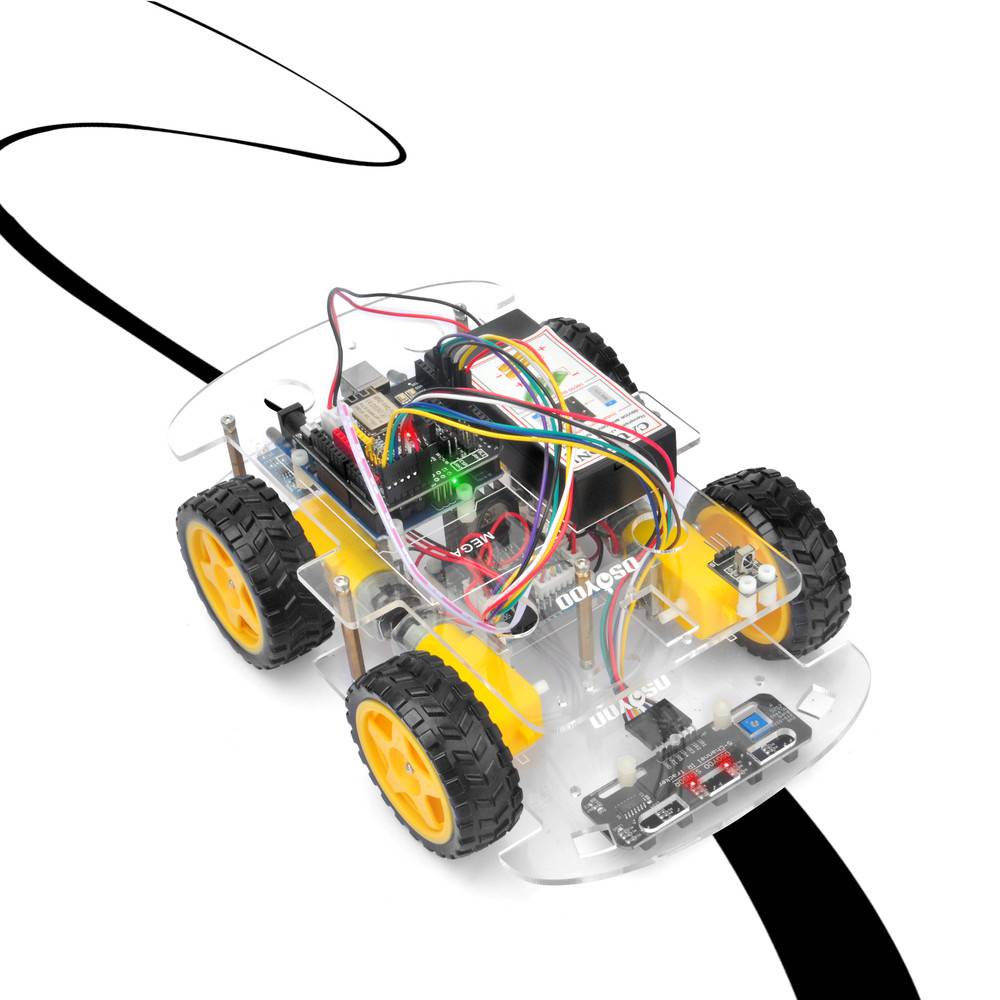
Préparez une piste noire (la largeur de la piste noire est supérieure à 20 mm et inférieure à 30 mm) dans un sol blanc. Veuillez noter que l’angle de courbure de la piste ne peut être supérieur à 90 degrés. If the angle is too large, the car will move out of the track.
Mettez la voiture en marche et placez le centre du module du capteur de suivi face à la piste noire, puis la voiture se déplacera le long de la piste noire.