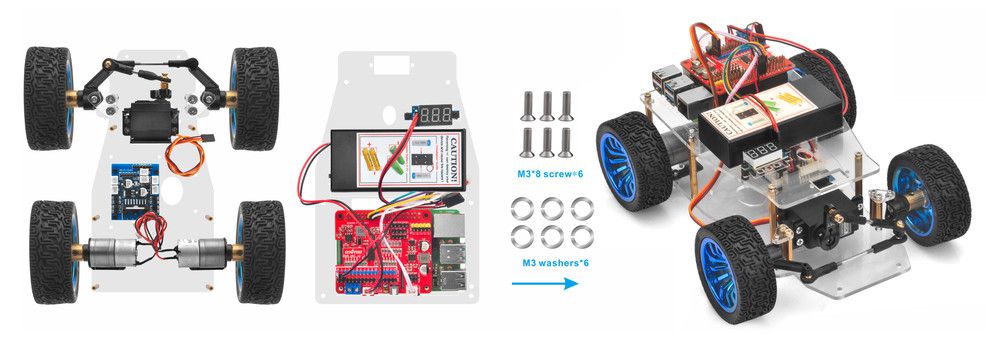
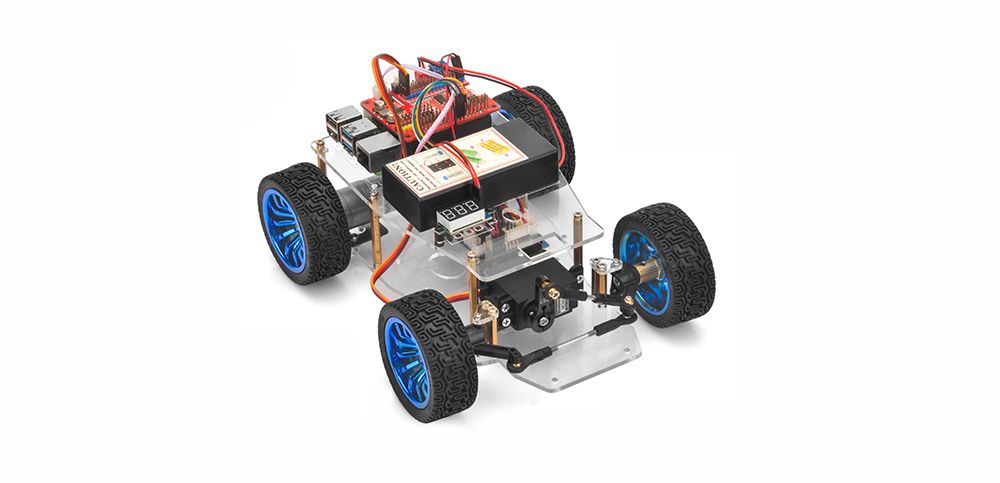
Bienvenue à la première leçon d’OSOYOO Servo Steer Smart Car pour Raspberry Pi !
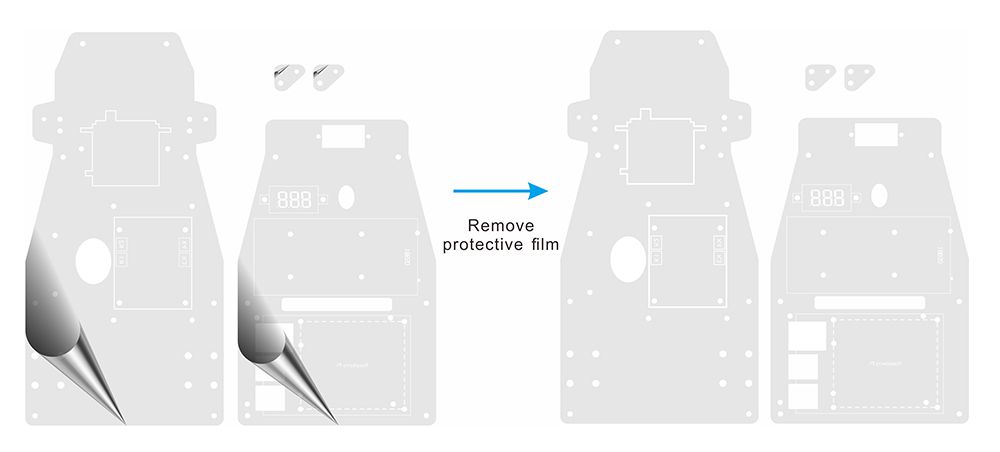
Dans cette leçon, nous allons installer le framework de l’OSOYOO Servo Steer Smart Car pour Raspberry Pi et simplement introduire le matériel de ce robot.
Toutes les leçons sont basées sur le cadre de cette leçon. Veuillez suivre attentivement cette leçon.
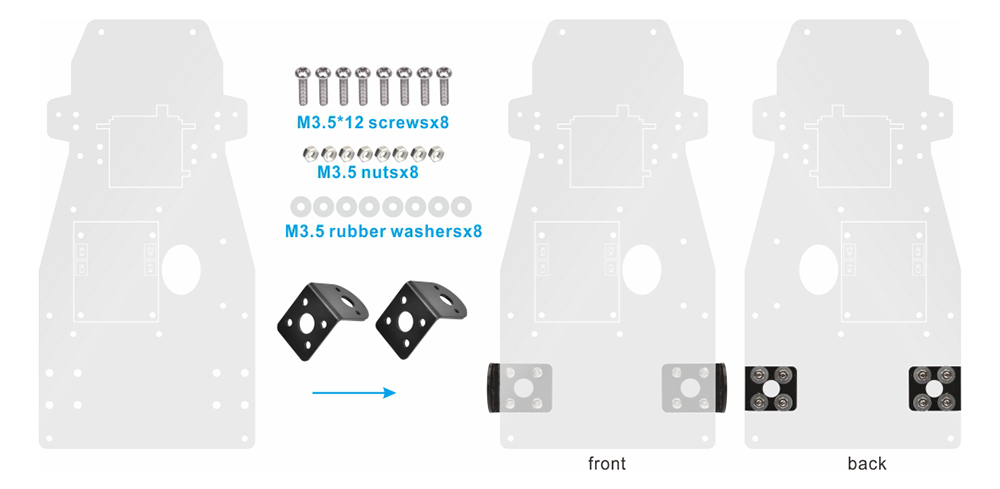
2. Fixez les supports de moteur sur le châssis inférieur avec 8pcs M3.5 * 12 vis, écrous M3.5 et rondelles en caoutchouc M3.5. De haut en bas, utilisez des vis M3.5 * 12 traversant le châssis inférieur, le support de moteur, la rondelle en caoutchouc 3.5 puis l’écrou 3.5 comme suit:
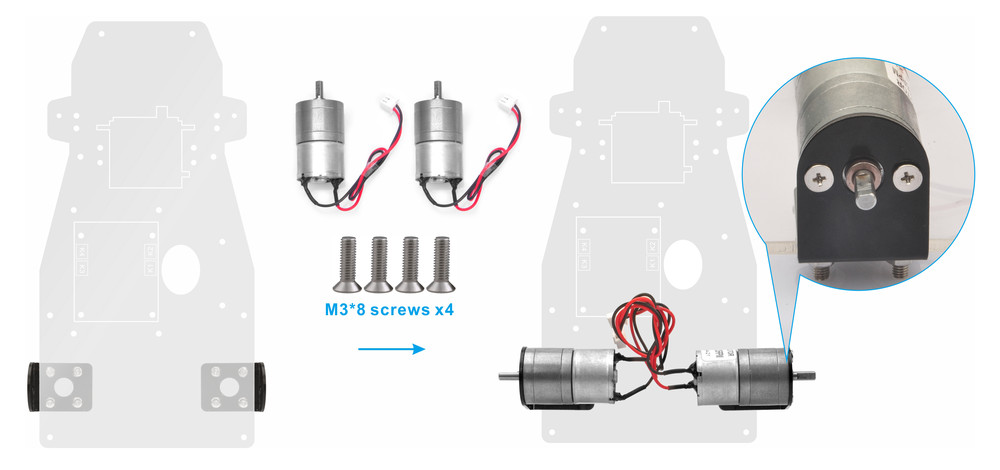
3. Support de moteur croisé, utilisez des vis M3 * 8 pour fixer le moteur sur le support de moteur comme suit:
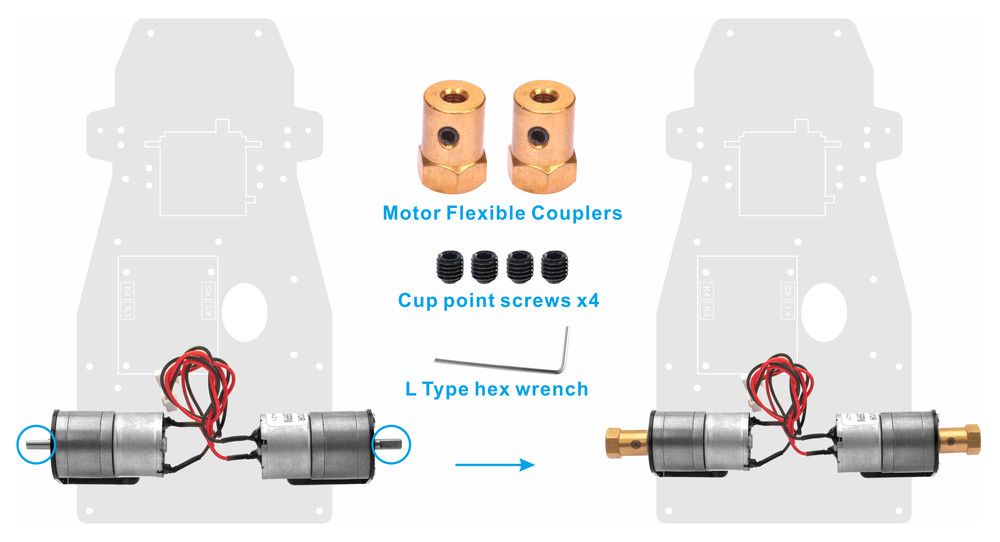
4. Installez des coupleurs flexibles de moteur sur les moteurs et utilisez des vis à point de coupe pour fixer les coupleurs flexibles du moteur sur le moteur.
L’arbre du moteur a une zone plate. Assurez-vous que les vis à point de coupe sont positionnées sur ce plat et serrez les deux vis sur l’arbre.
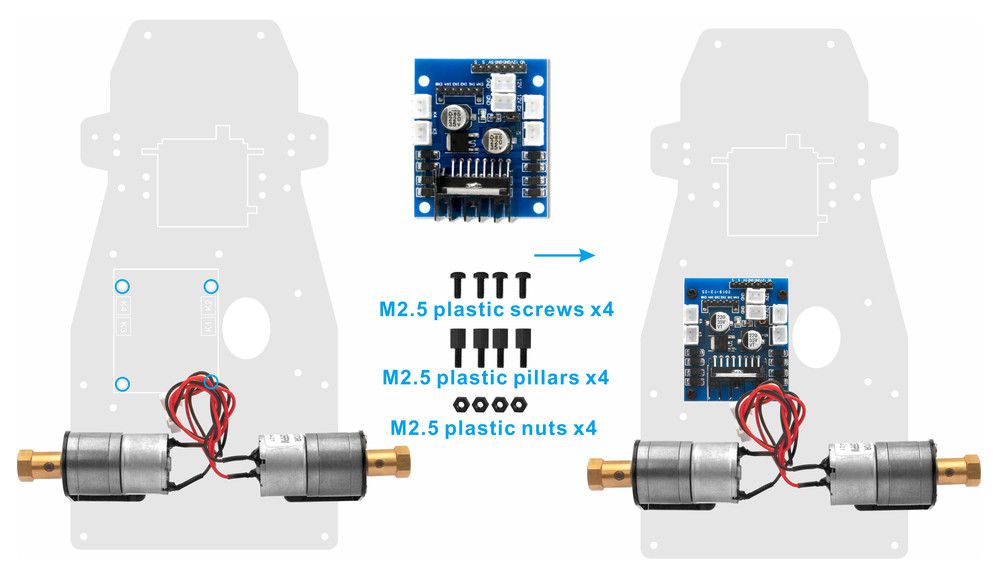
5. Installez le module de commande de moteur OSOYOO MODEL X pour abaisser le châssis de la voiture avec des vis en plastique M4.2 5pcs, des piliers en plastique et des écrous en plastique. (Assurez-vous d’installer le module pilote de moteur OSOYOO MODEL X dans le bon sens.)
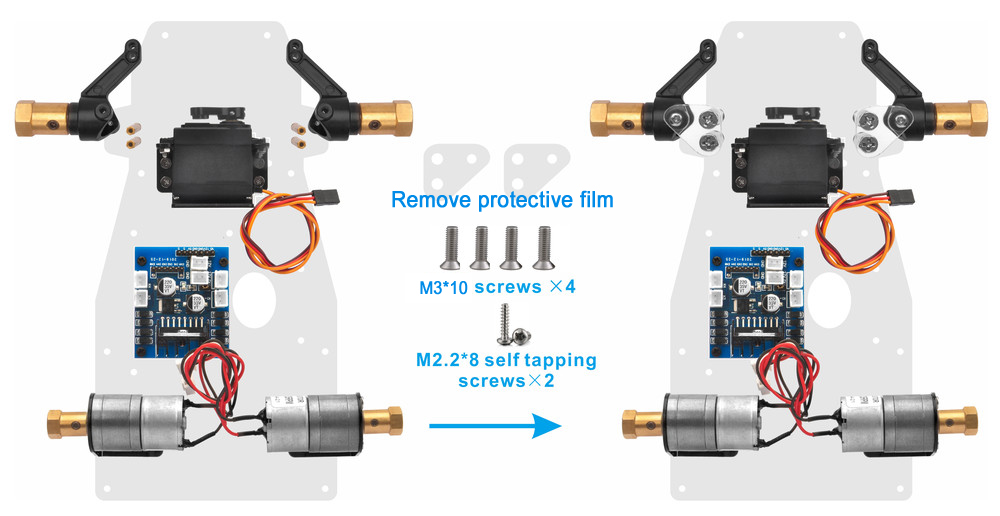
6. Fixez le servomoteur sur le support du servomoteur avec les vis et les écrous M3 * 10 comme suit:
7. Utilisez des vis M3 * 10 support de servomoteur croisé avec servomoteur, châssis inférieur et écrou pour fixer le servomoteur sur le châssis inférieur comme suit:
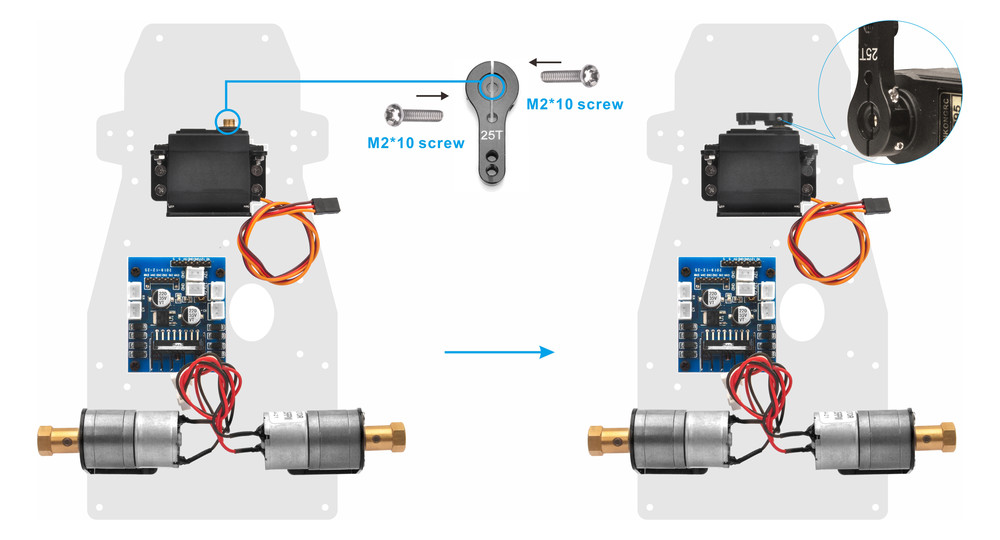
8. Installez le klaxon de servo sur le servomoteur et installez la vis M2 * 10 de chaque côté du pavillon de servocommande comme suit:
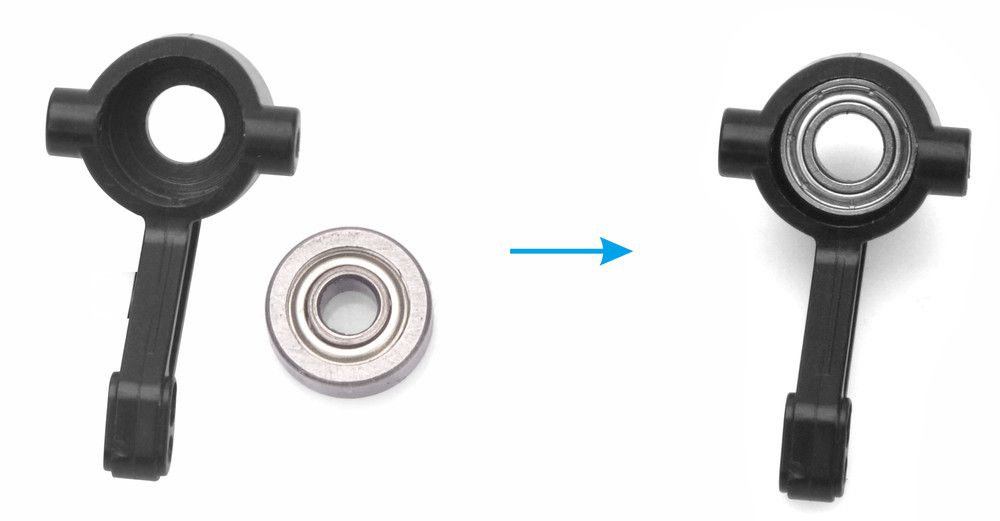
9. Poussez fermement le roulement à rouleaux 4x12x4 à l’avant de la ventouse RC comme suit:
10. Poussez fermement le roulement à rouleaux 4x8x4 à l’arrière de l’estomphe RC comme suit:
11. Utilisez le bonnet de direction M4 * 20 à vis transversale RC comme suit:
12. Fixez les coupleurs flexibles du moteur sur la vis M4 * 20 avec les vis à point de coupe comme suit:
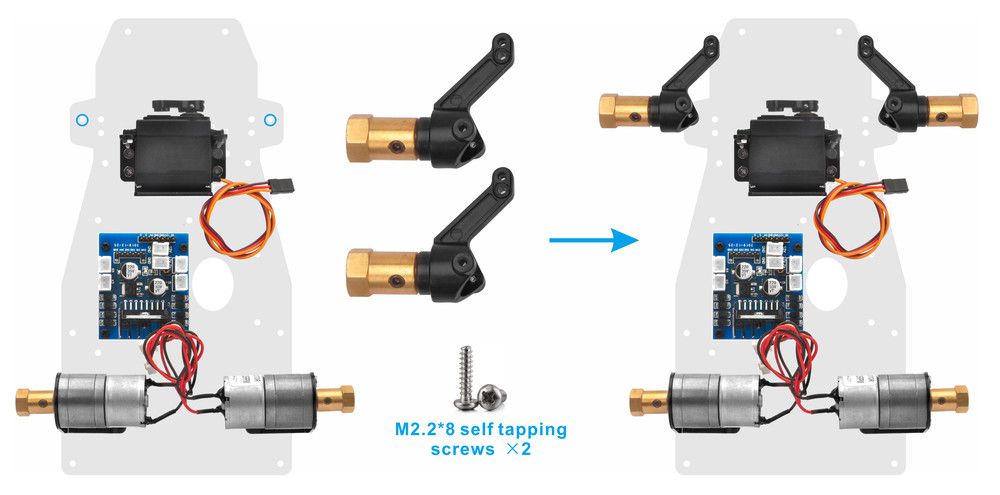
13. Fixez les ventouses RC sur le châssis inférieur de la voiture avec des vis autotaraudeuses M2.2 * 8 comme suit:
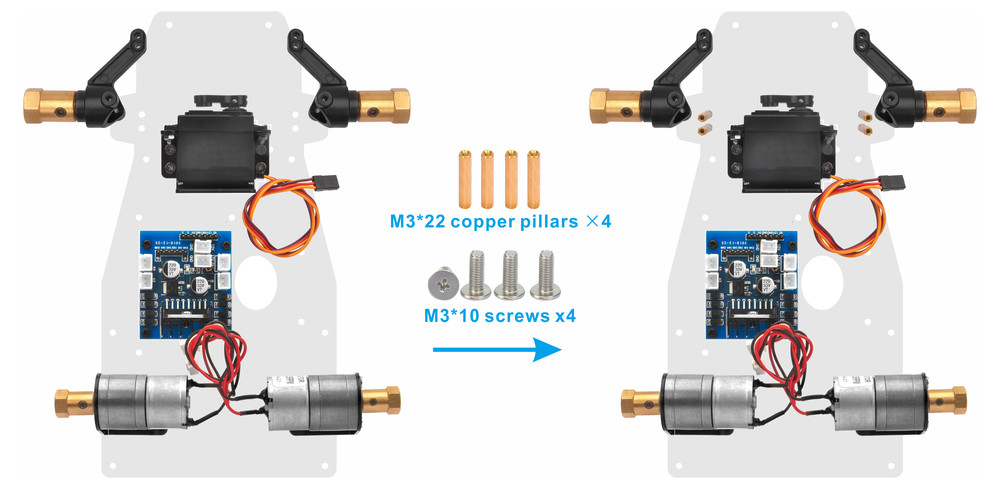
14. Installez des piliers en cuivre M3 * 22 à côté des ventouses RC avec des vis M3 * 10 comme suit:
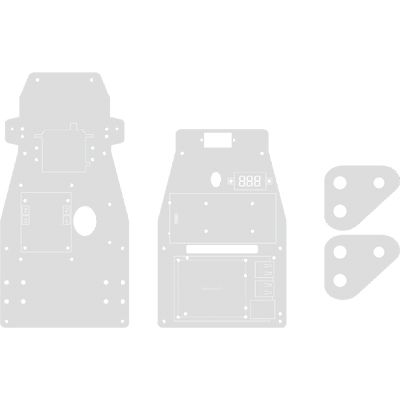
15. Installez des feuilles d’acrylique triangulaires sur les piliers en cuivre M3 * 22 et fixez-les avec des vis autotaraudeuses M2.2 * 8 et des vis M3 * 10 comme suit:
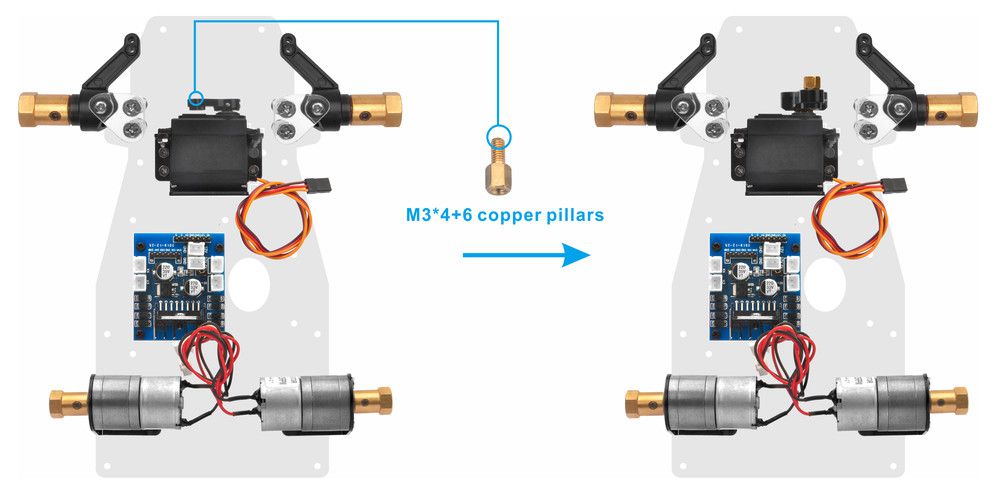
16. Installez le pilier en cuivre M3 * 4 + 6 sur le klaxon de servo comme suit:
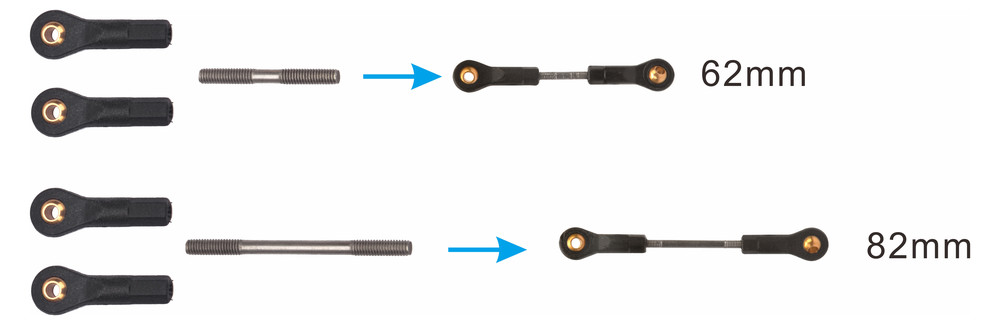
17. Fixez 2 bielles avec des roulements d’extrémité radiaux à tige et assurez-vous que les longueurs de ceux-ci sont d’environ 62 mm et 82 mm
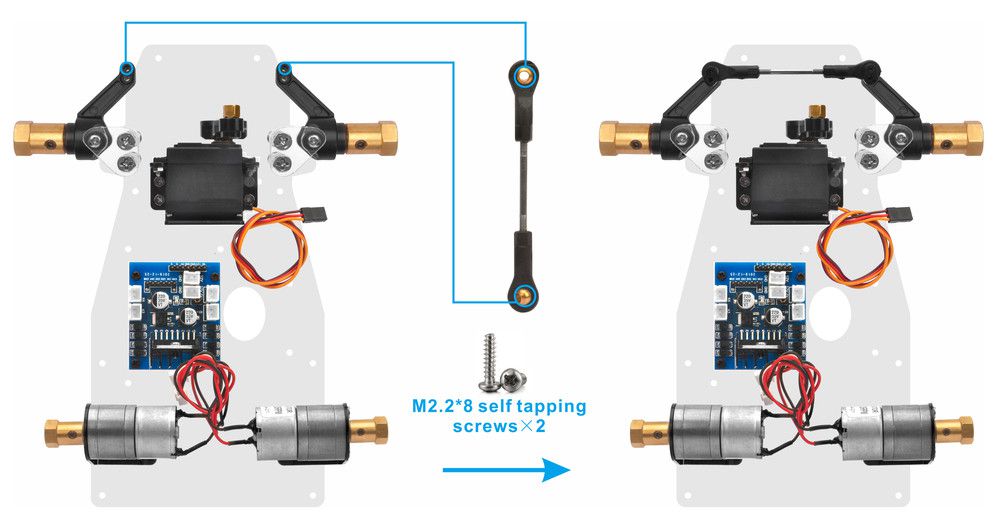
18. Installez deux extrémités de bielle de 82 mm sous les ventouses de direction RC avec des vis autotaraudeuses 2pcs M2.2 * 8 comme suit (Remarque: Lors de l’installation de la bielle de 82 mm, veuillez garder les têtes de deux ventouses RC parallèles, ou vous devez ajuster la longueur de cette bielle):
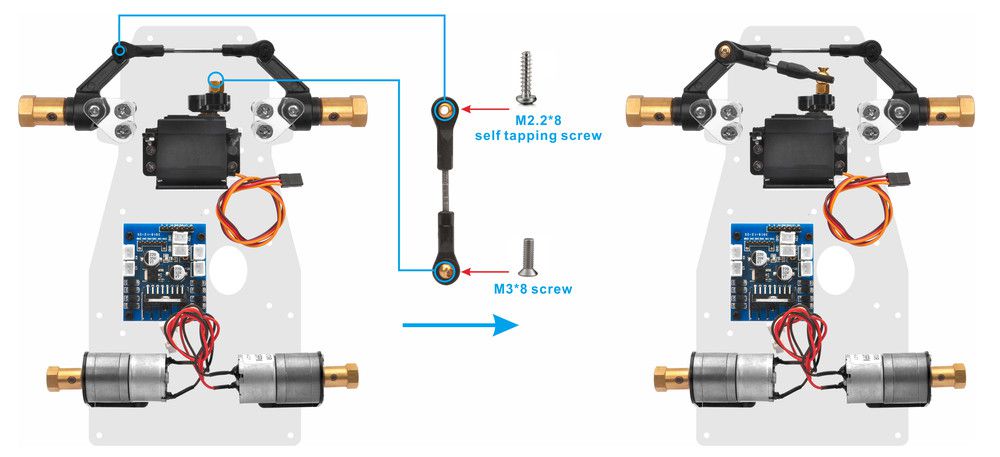
19. Installez une extrémité de bielle de 62 mm sur le vide gauche RC avec vis autotaraudeuse M2.2 * 8 et l’autre extrémité sur le montant en cuivre M3 * 4 + 6 avec vis M3*8 comme suit (Remarque: Lors de l’installation de la bielle de 62 mm, veuillez garder le klaxon d’asservissement perpendiculaire au micro servo, ou vous devez ajuster la longueur de cette bielle) :
20. Installez 4 roues sur les coupleurs flexibles du moteur avec des vis M4 * 6 comme suit:
21. De bas en haut, utilisez M3 * 8 cross M3 wash, châssis inférieur et M3 * 45 pilier en cuivre pour fixer le montant en cuivre M3 * 45 sur le châssis bas comme suit:
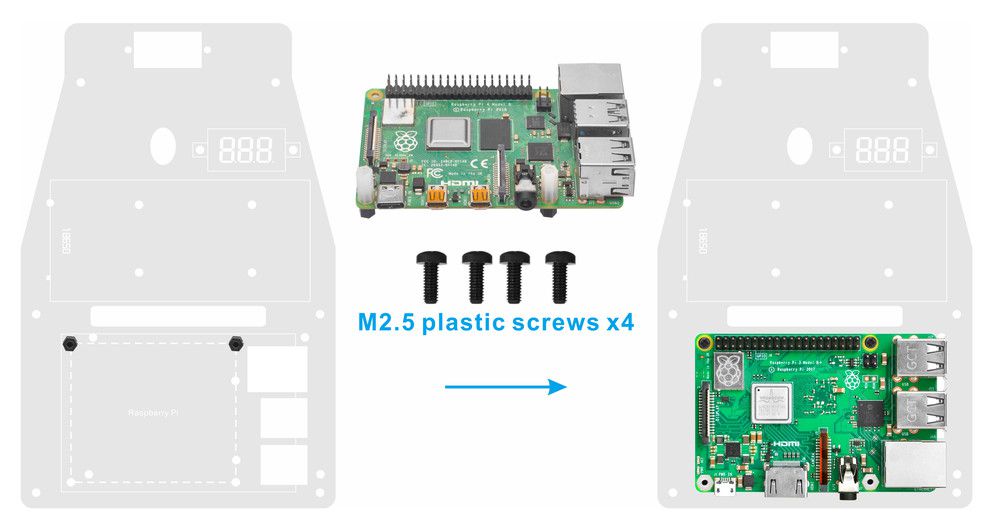
22. Utilisez le pilier en plastique M2.5 croisé Raspberry Pi et le pilier en plastique M2.5 * 13 de bas en haut et fixez les piliers en plastique 2pcs M2.5 * 13 sur Raspberry Pi comme suit:
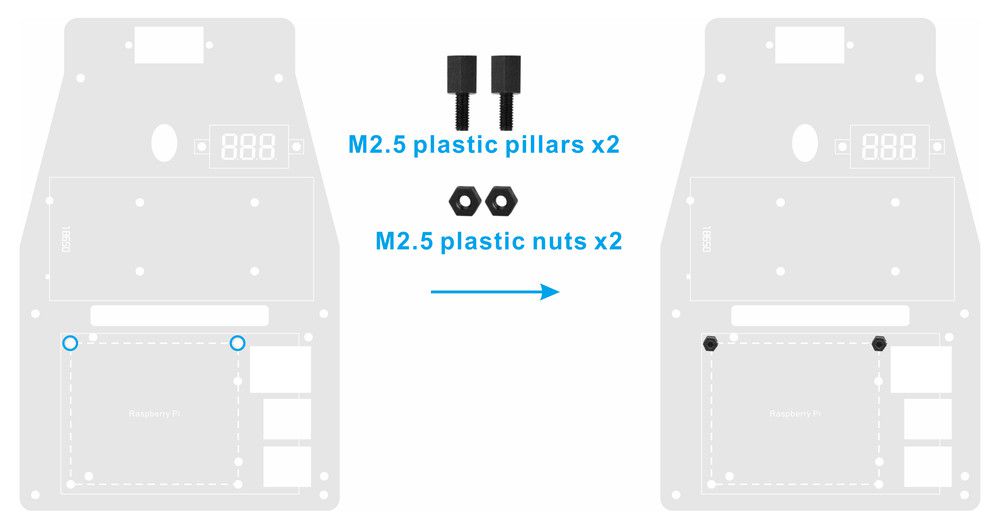
23. Fixez les piliers en plastique 2pcs M2.5 sur le châssis supérieur comme suit:
24. Installez des vis en plastique 2pcs M2.5 sous le châssis et des vis en plastique 2pcs M2.5 sur Raspberry Pi
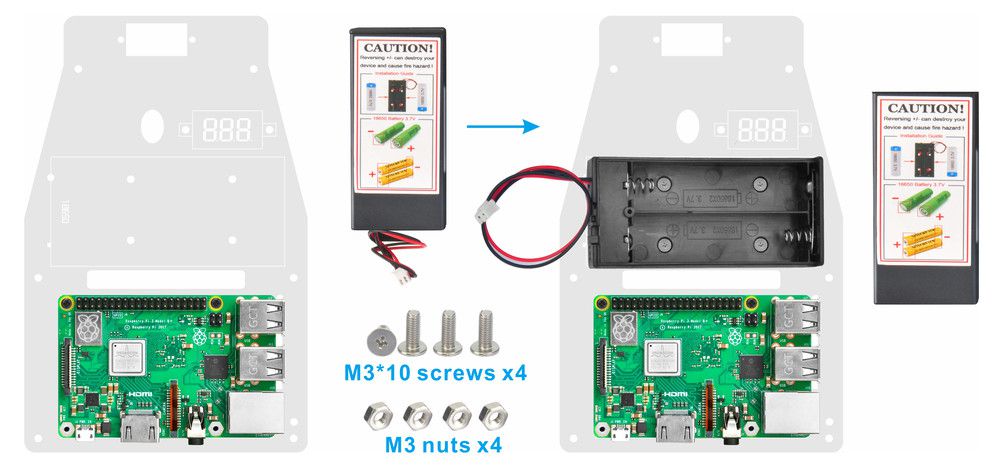
25. Correction du boîtier de batterie 18650 sur le châssis supérieur avec vis M3 * 10 et écrous M3
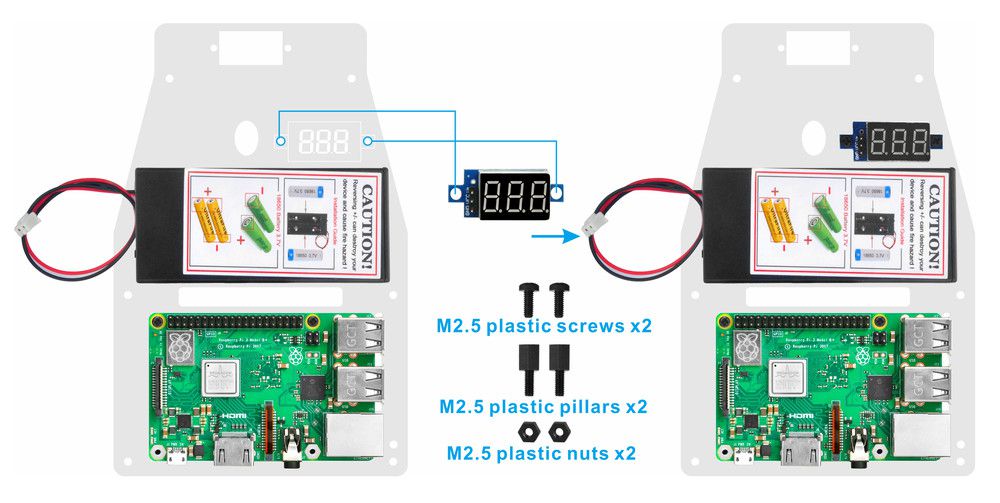
26. Installez le tensiomètre sur le châssis supérieur de la voiture avec des vis en plastique 2pcs M2.5, des piliers en plastique et des écrous en plastique
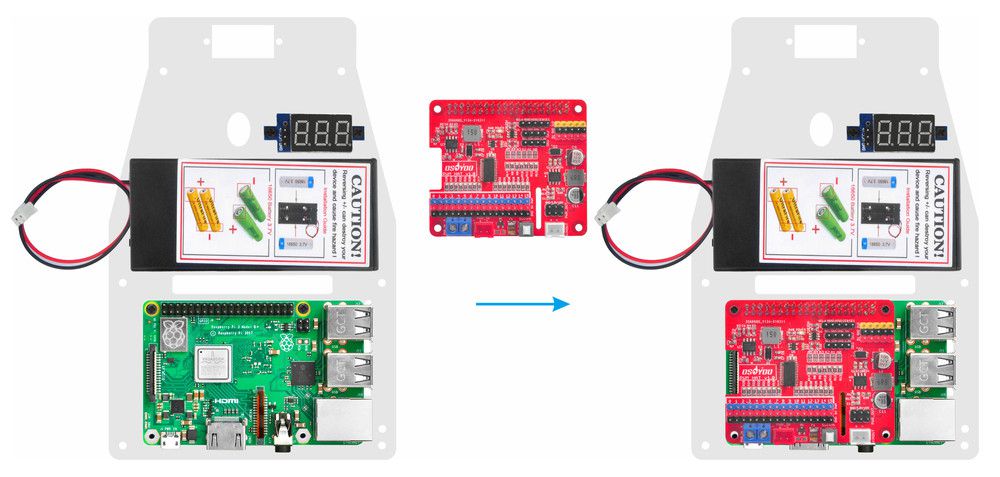
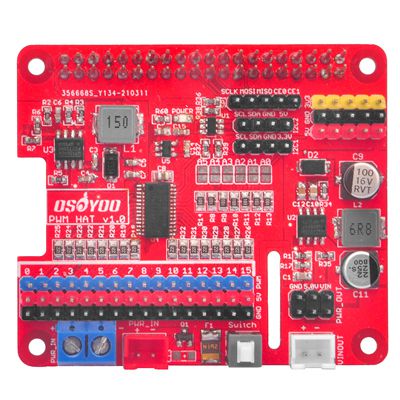
27. Insérez OSOYOO PWM Hat V1.0 sur Raspberry Pi comme suit: Remarque:
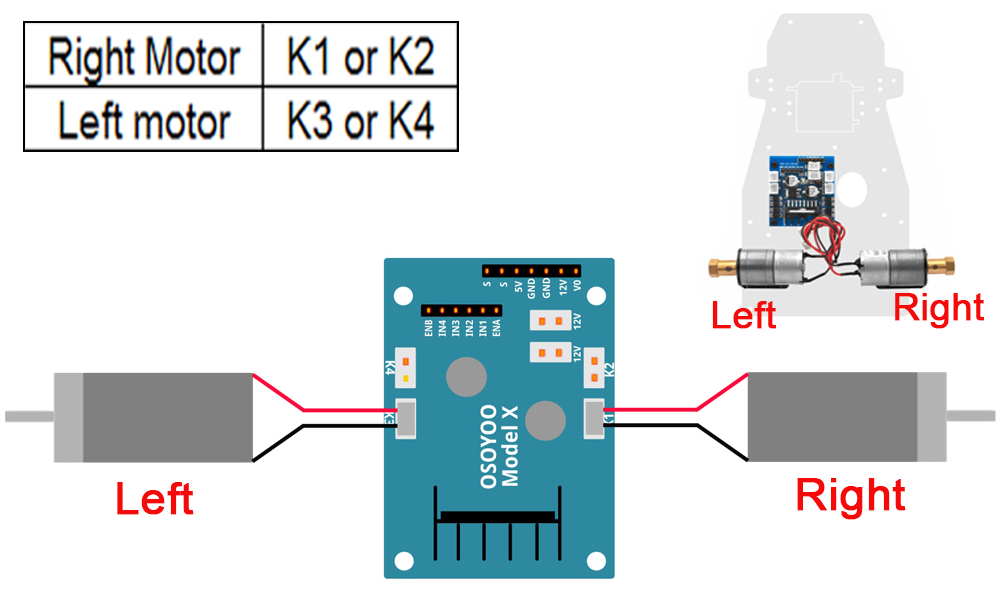
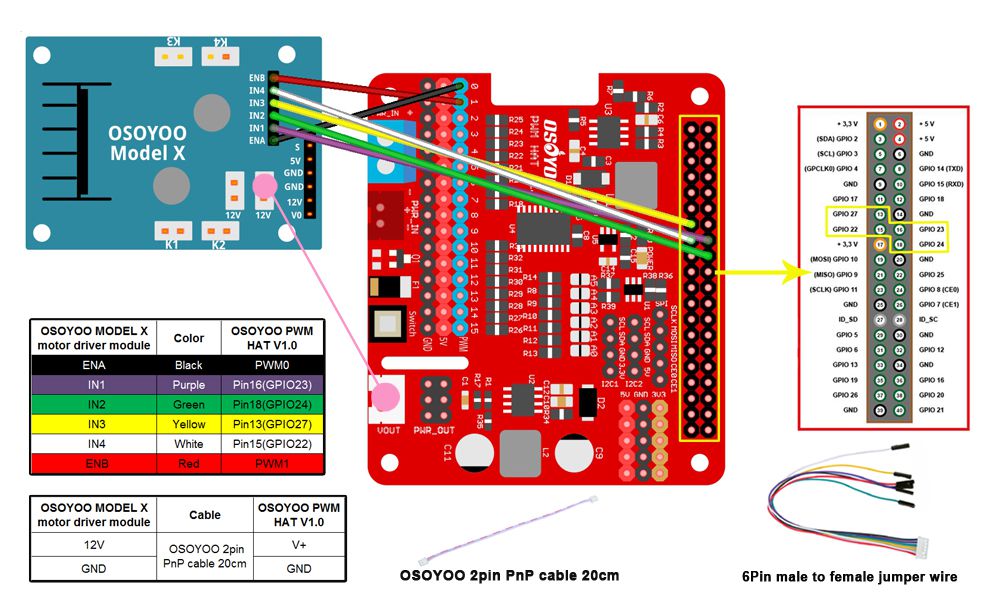
1) Connectez le moteur gauche au module de commande de moteur OSOYOO MODEL X à la prise K3 ou K4 et le moteur droit à la prise K1 ou K2 comme graphique suivant:
2) Connectez le module de pilote de moteur OSOYOO MODEL X à OSOYOO PWM Hat V1.0 avec fil de cavalier femelle à femelle à 6 broches, connectez également un câble 2 broches de 20 cm comme graphique suivant
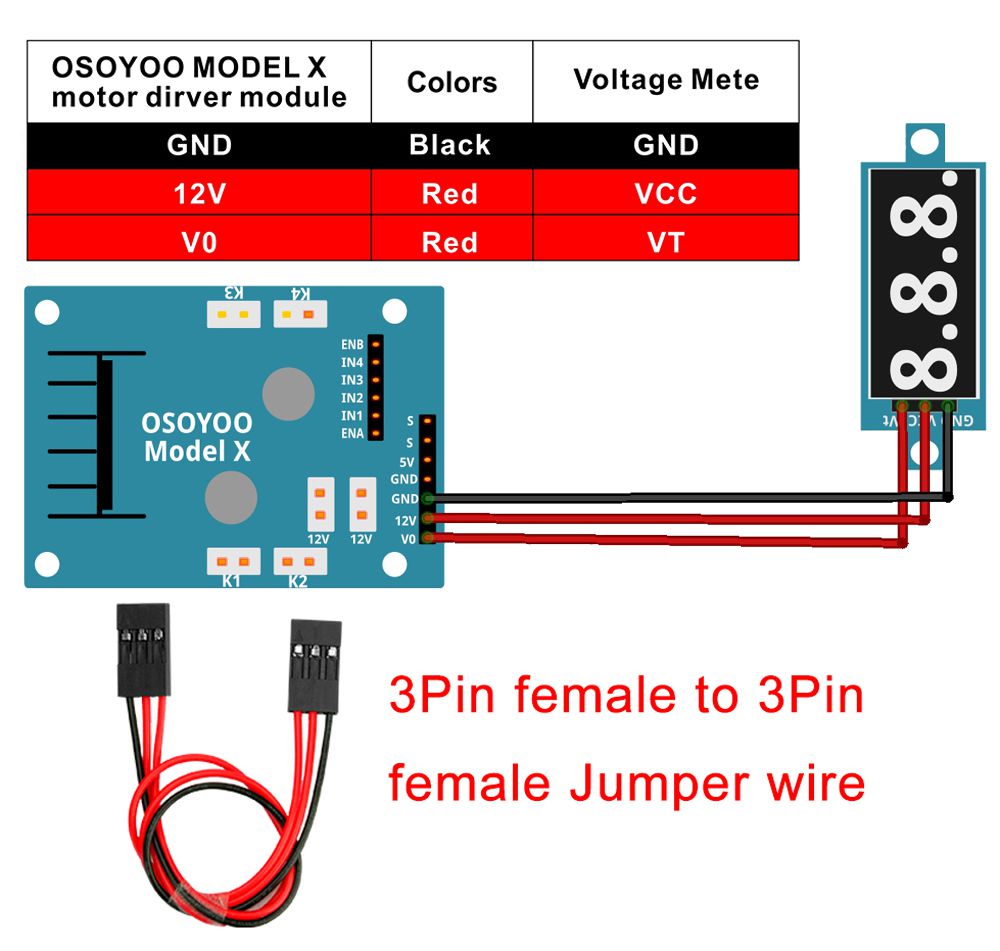
3) Connectez le voltmètre au module de pilote de moteur OSOYOO MODEL X avec des fils de démarrage femelle à femelle à 3 broches comme connexion ci-dessous
diagramme
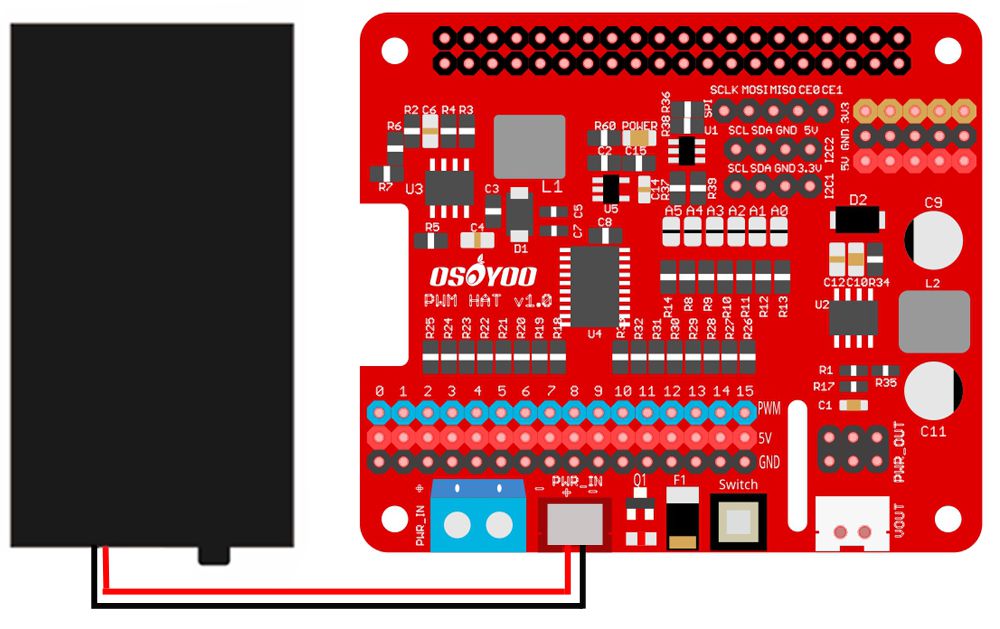
4) Connectez le boîtier de batterie 18650 à OSOYOO PWM Hat V1.0 comme ci-dessous schéma de connexion
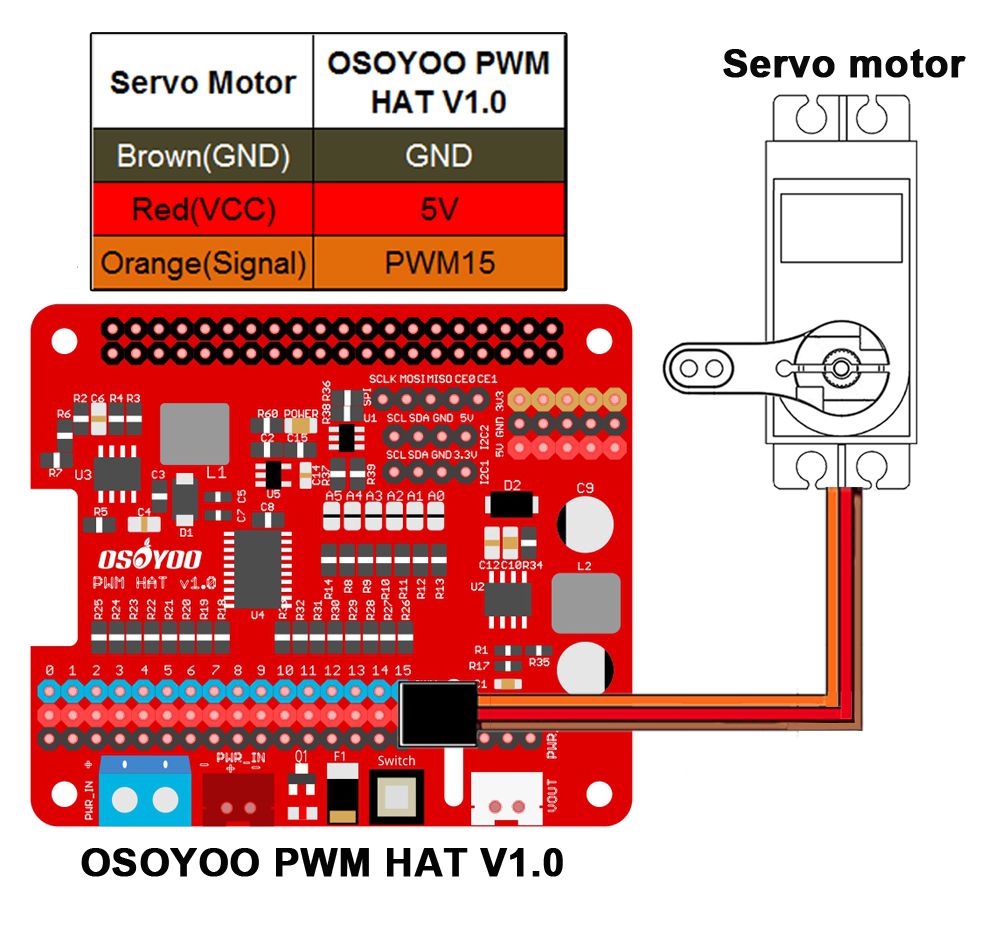
5) Connectez le servomoteur à 15 OSOYOO PWM Hat V1.0 comme suit:
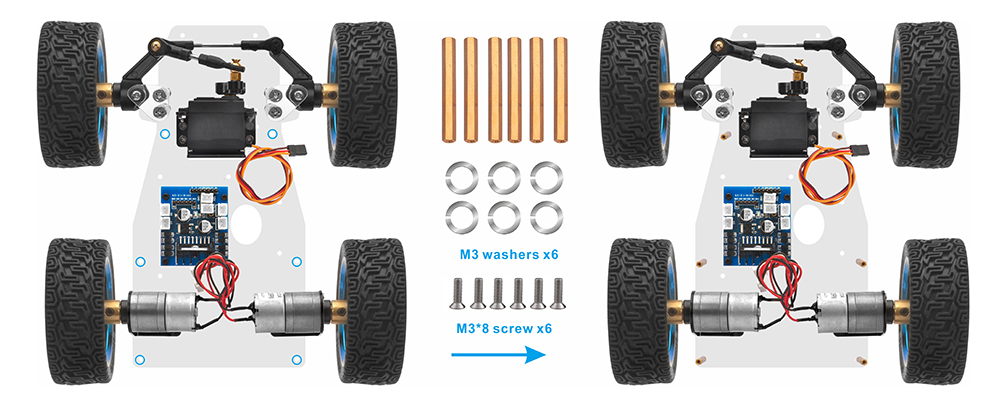
6) Connectez le châssis supérieur au châssis inférieur avec 6 piliers en cuivre et fixez les piliers en cuivre avec des vis M3 * 8 et des lavages M3 comme suit:
7) Veuillez installer vos batteries 18650 dans le boîtier de batterie pour 18650 selon les instructions suivantes (Remarque:Vérifiez les instructions de la case et assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie.): Maintenant,




































 7. Utilisez des vis M3 * 10 support de servomoteur croisé avec servomoteur, châssis inférieur et écrou pour fixer le servomoteur sur le châssis inférieur comme suit:
7. Utilisez des vis M3 * 10 support de servomoteur croisé avec servomoteur, châssis inférieur et écrou pour fixer le servomoteur sur le châssis inférieur comme suit: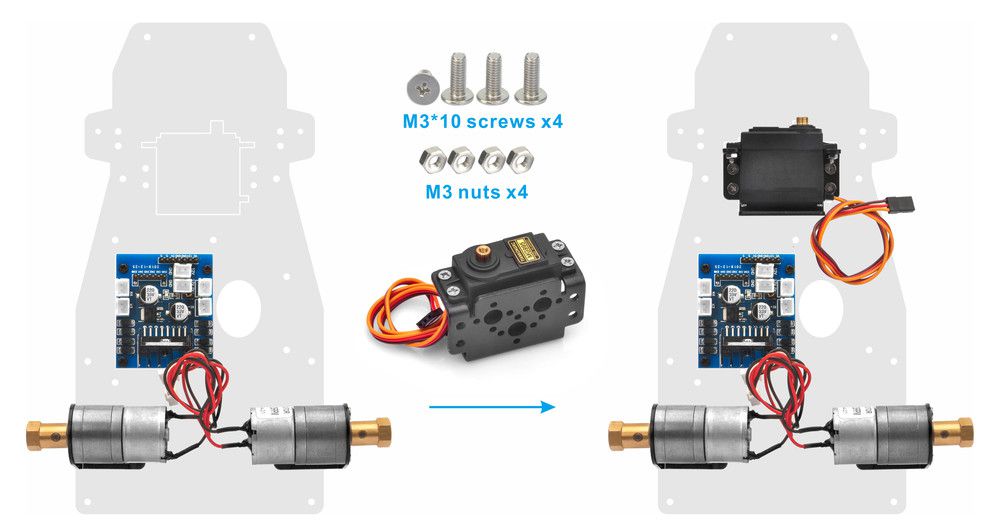 8. Installez le klaxon de servo sur le servomoteur et installez la vis M2 * 10 de chaque côté du pavillon de servocommande comme suit:
8. Installez le klaxon de servo sur le servomoteur et installez la vis M2 * 10 de chaque côté du pavillon de servocommande comme suit: