Bienvenue à la première leçon de la voiture intelligente!
Objectif
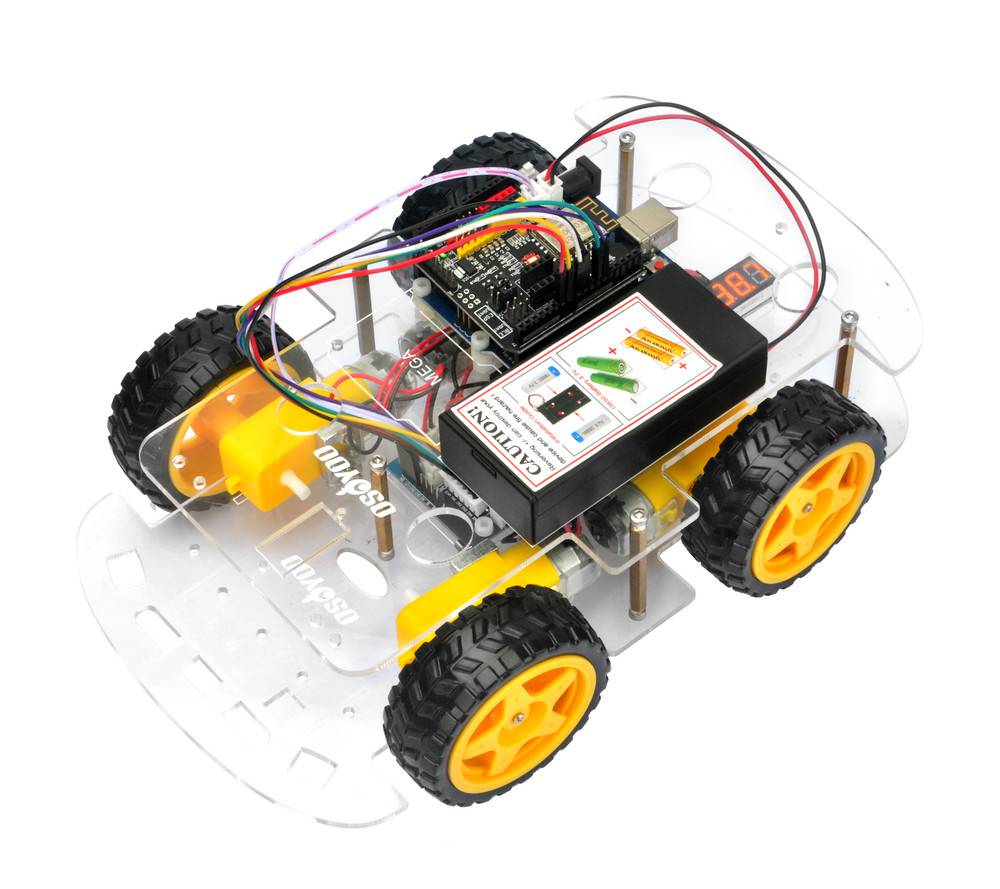
Dans cette leçon en version “Hello World”, nous allons installer le cadre le plus important dans la voiture intelligente et programmer la voiture pour qu’elle effectue quelques mouvements simples. Si vous avez réussi le mouvement de test de cette leçon, cela signifie que la carte, le voltmètre, le module de commande du moteur, les moteurs, les batteries, le châssis et les connexions entre ces pièces fonctionnent bien.
Comme vos expériences dans les leçons suivantes sont toutes basées sur le travail de la première leçon, il est très important de tester correctement l’installation et le code d’exemple de cette leçon.
Pièces et dispositifs:
Nombre
Photo
Dispositif
Quatité
Accessoires
Acheter en lien
1
OSOYOO basic board
1
Vis en plastique M3 x 3
Pilier en plastique M3 x 4
Ecrou plastique M3 x 4
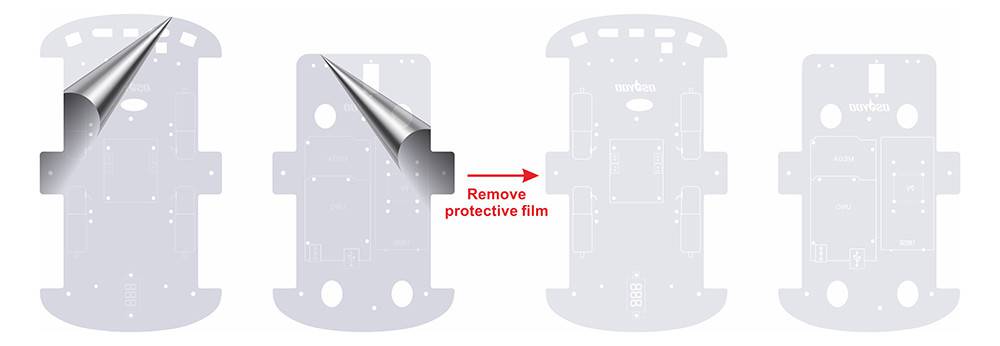
1) Enlever le film protecteur sur les châssis supérieur et inférieur de la voiture (Chaque châssis de voiture dispose d’un film protecteur)
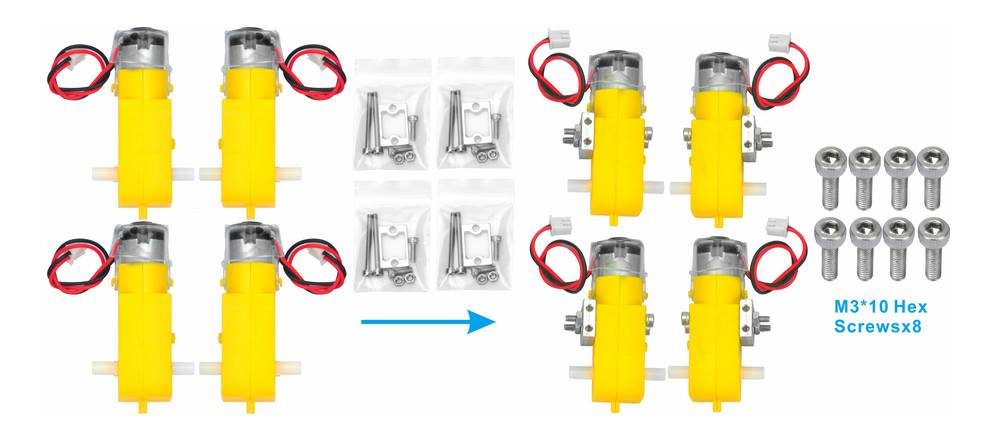
2) fixer 4 moteurs avec des supports de moteur en métal comme suit (Veuillez vérifier la direction du moteur avant d’installer les supports de moteur métalliques.)
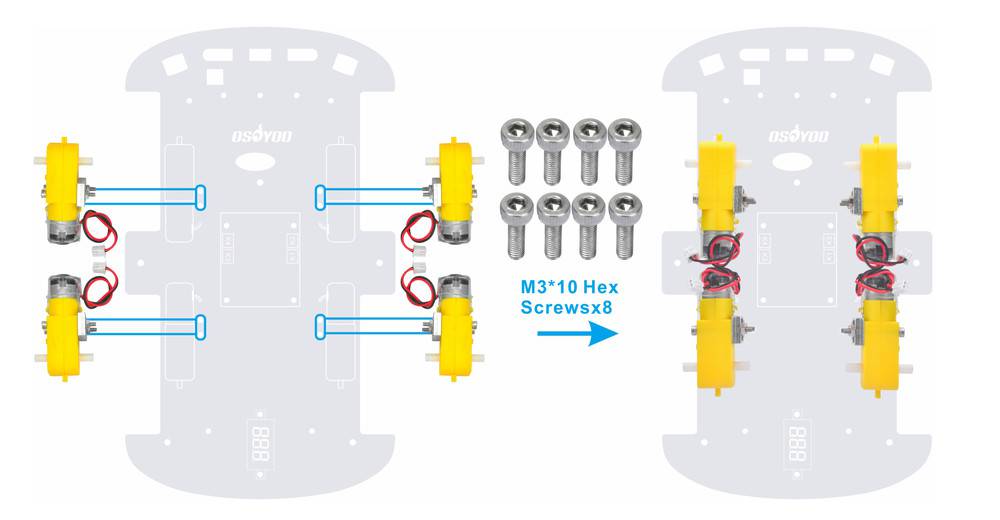
3) Fixer les 4 moteurs sur le châssis inférieur de la voiture avec des vis hexagonales M3*10 à l’aide d’un tournevis hexagonal. (Les vis nécessaires à cette étape se trouvent dans l’emballage du porte-moteur métallique.)
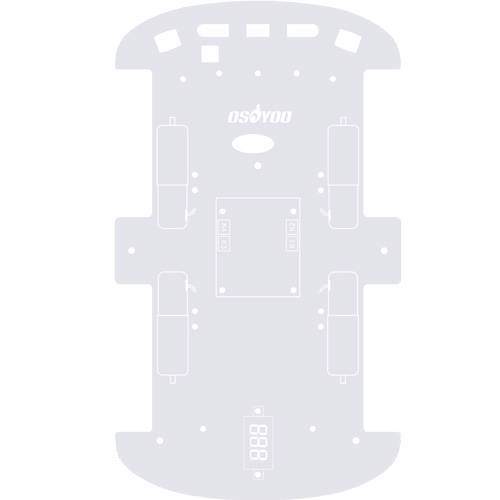
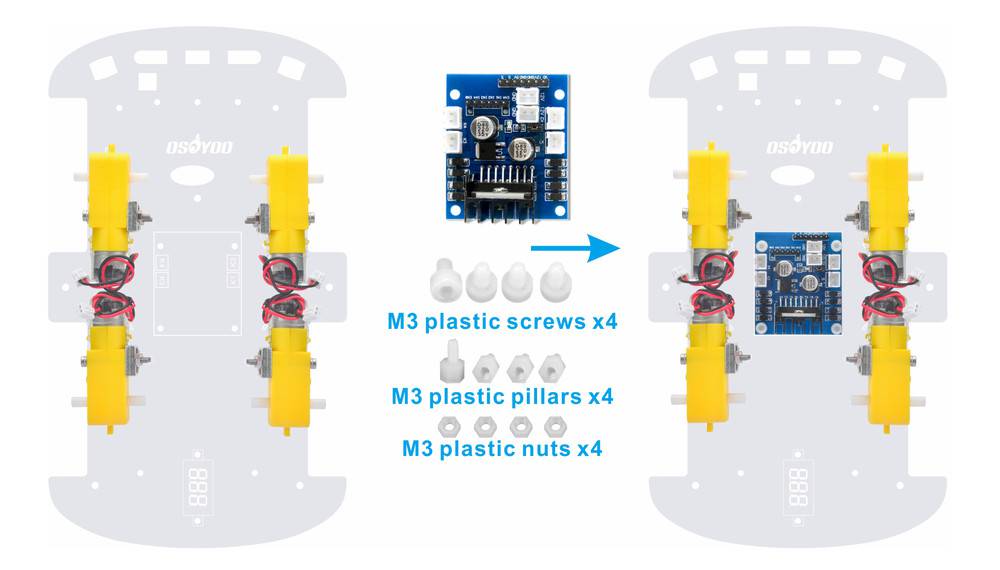
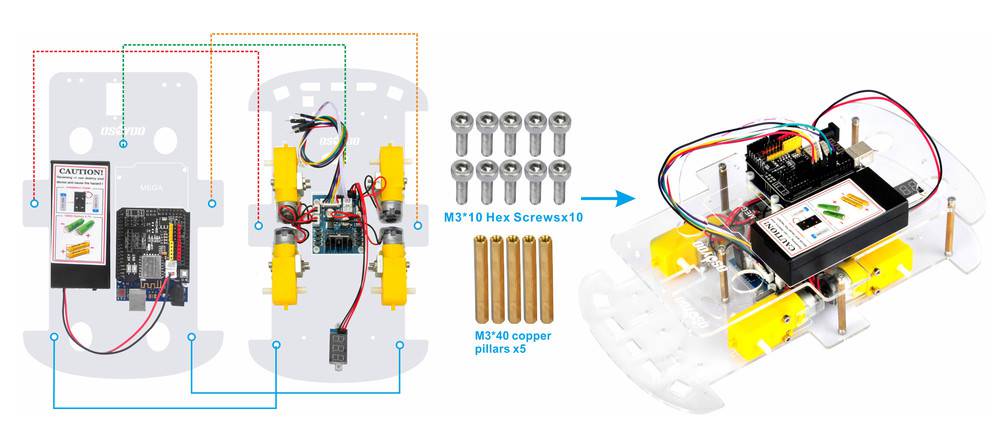
4) Installer le module de pilotage du moteur OSOYOO MODEL X sur le châssis inférieur de la voiture à l’aide de 4 vis en plastique M3, de piliers en plastique et d’écrous en plastique. (Veillez à installer le module de pilotage de moteur OSOYOO MODEL X dans le bon sens..)
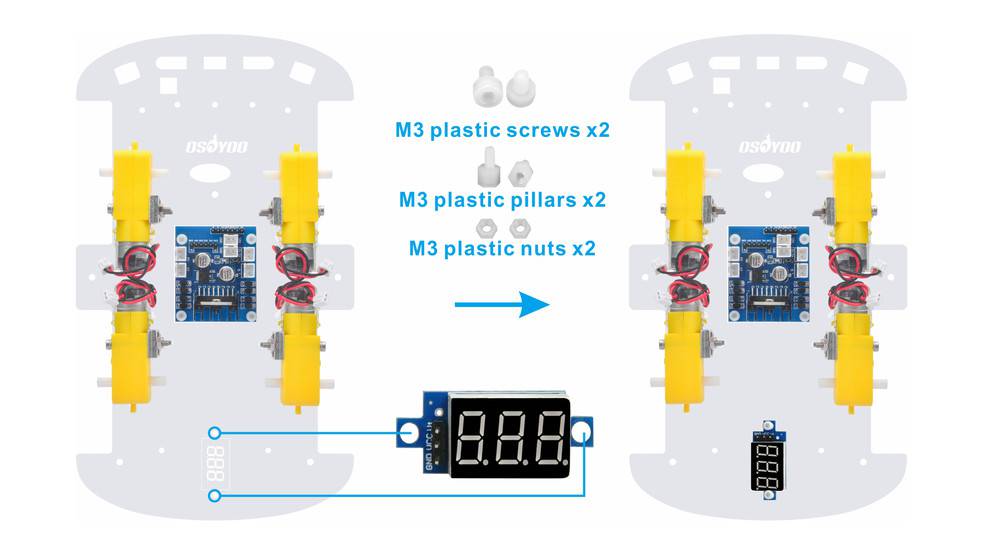
5) Installer le compteur de tension sur le châssis de la voiture basse à l’aide de 2 vis en plastique M3, de piliers en plastique et d’écrous en plastique.
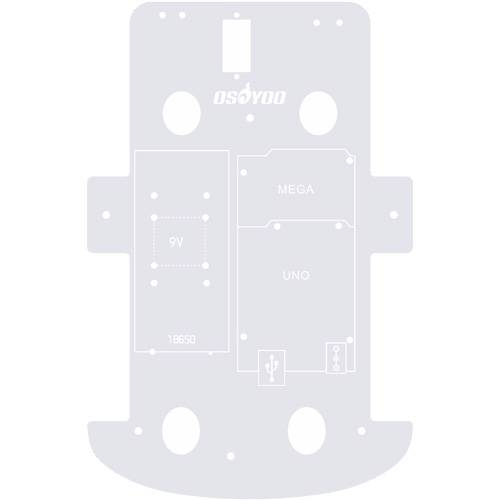
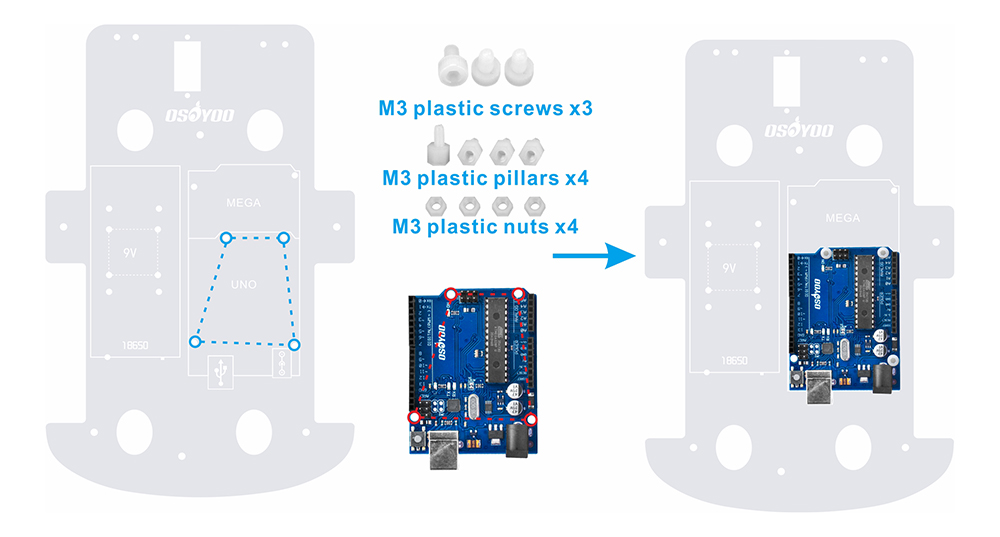
6) Fixer la carte de base OSOYOO sur le châssis supérieur de la voiture à l’aide de 4 vis en plastique M3, de piliers en plastique et d’écrous en plastique. (Veuillez installer le panneau sur le côté avec l’impression)
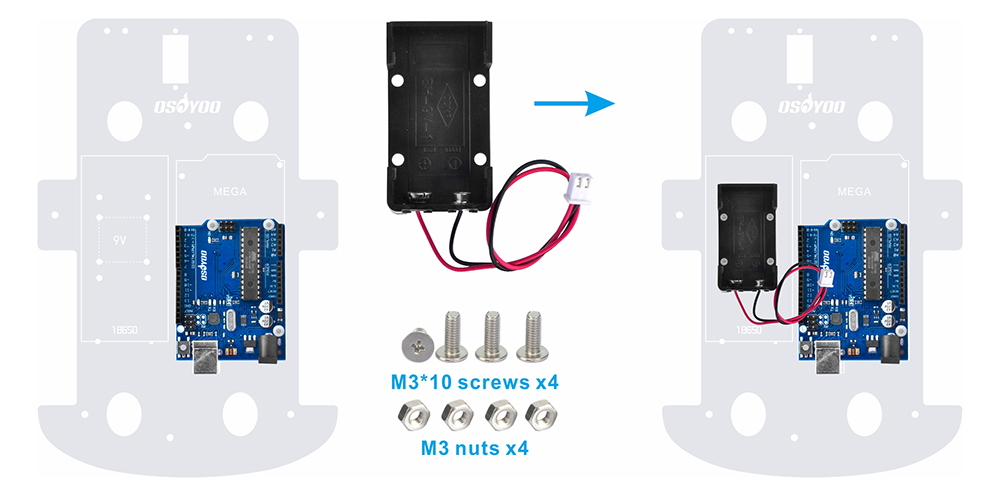
7) Il y a deux sortes de voitures robots que vous pouvez choisir d’acheter. L’un est composé de 2 boîtiers de piles (18650 et 9V), et l’autre est composé d’une paire de piles 18650 et d’un chargeur de piles 18650. Nous recommandons d’utiliser des piles 18650 comme source d’énergie. Si vous souhaitez utiliser une batterie 9V, veuillez utiliser une batterie 9V rechargeable. N’utilisez pas de batterie carbone-zinc, car elle ne peut pas fournir assez de courant pour la voiture robot.
A) Fixer ce boîtier de batterie sur le châssis supérieur à l’aide de 4 vis M3 x 10 et d’écrous M3.
B) Veuillez installer ce boîtier de batterie sur le châssis supérieur à l’aide de 4 vis M3 x 10 et d’écrous M3.(ce sont les mêmes vis et écrous que pour le boîtier de batterie 18650. Si vous n’avez pas de boîtier de batterie 9V, veuillez ignorer cette étape).
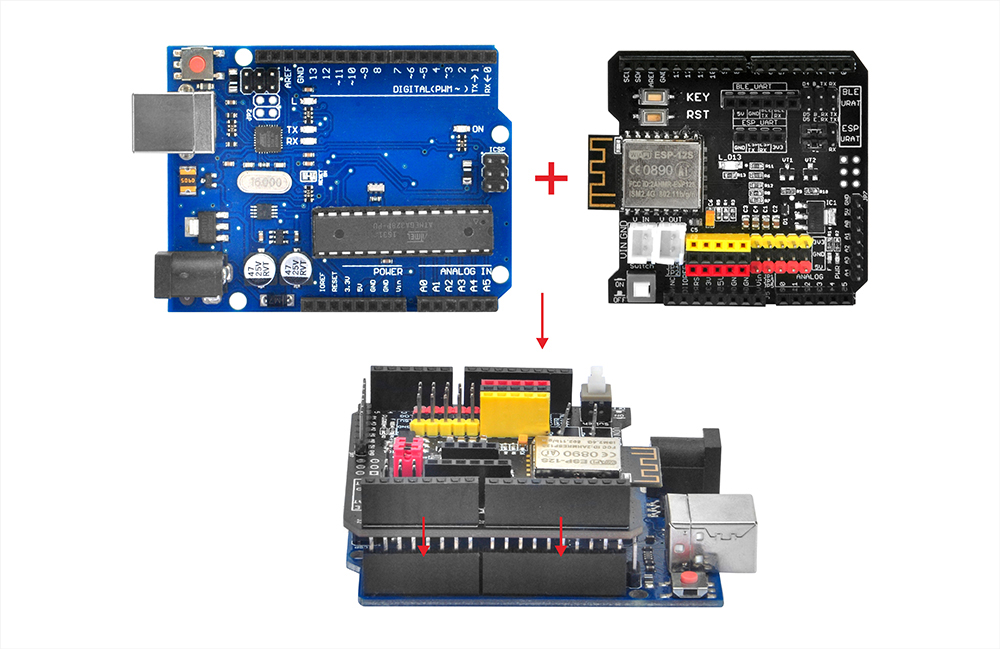
7) Insérez le bouclier OSOYOO Uart WIFI V1.3 sur votre carte.
Connexions
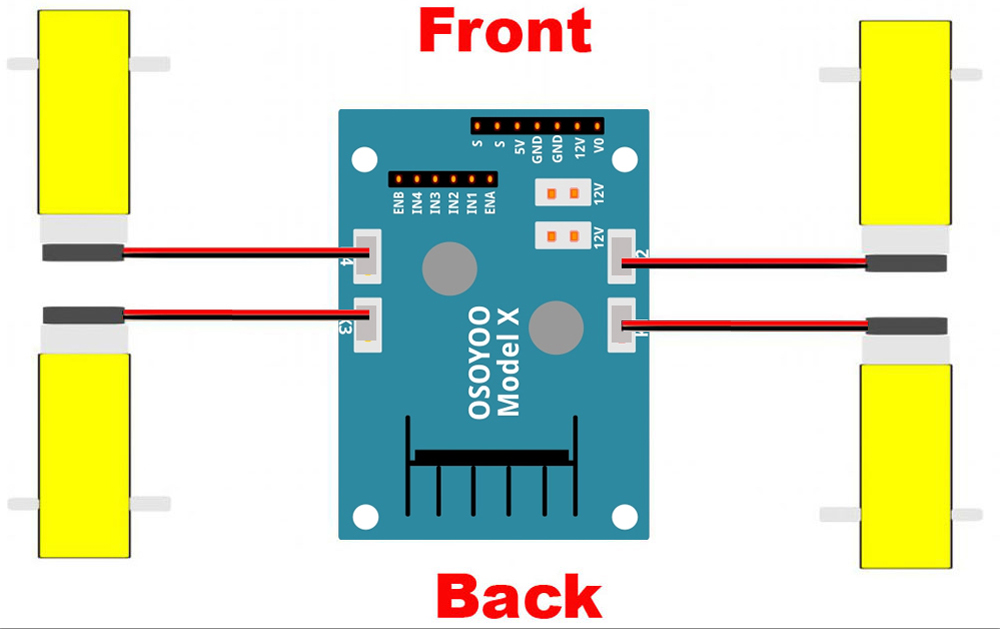
1) Connecter 4 moteurs aux prises K1 à K4 du module de pilotage de moteur OSOYOO MODEL X selon le graphique suivant:
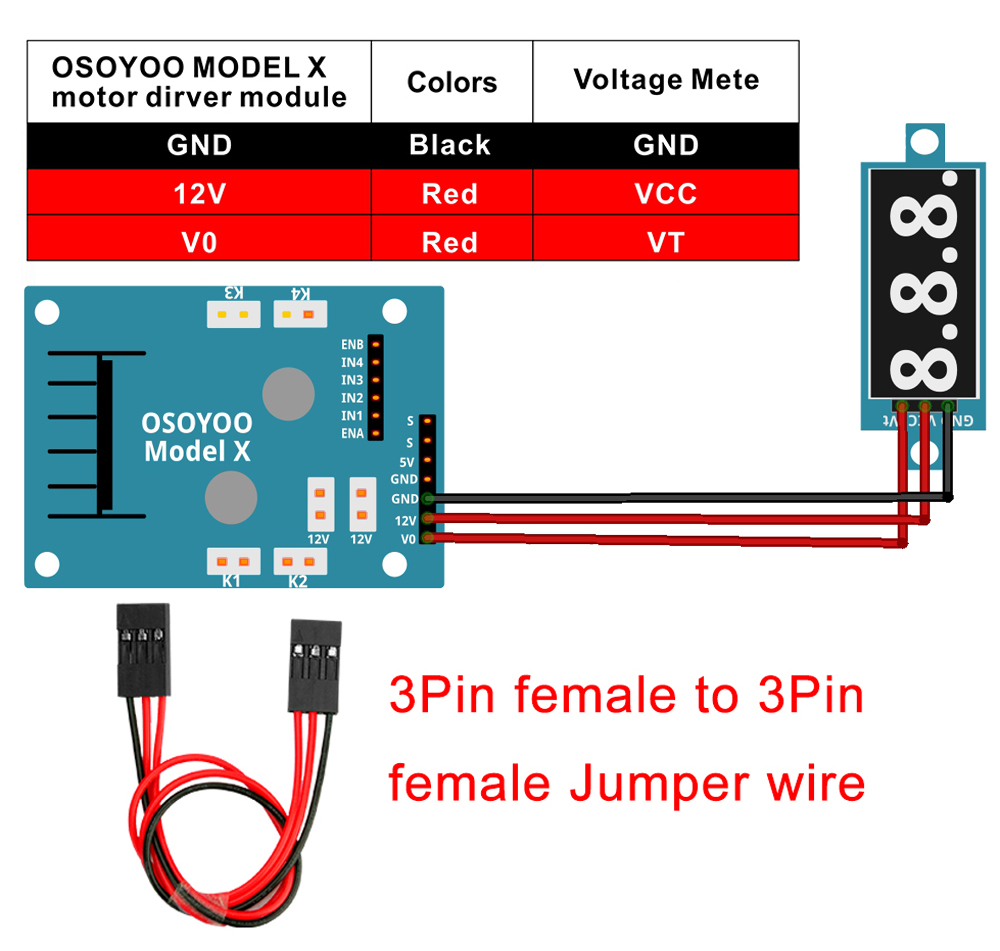
2) Connecter le voltmètre au module de pilotage du moteur OSOYOO MODEL X à l’aide d’un fil de liaison femelle-femelle à 3 broches, comme indiqué dans le diagramme de connexion ci-dessous.
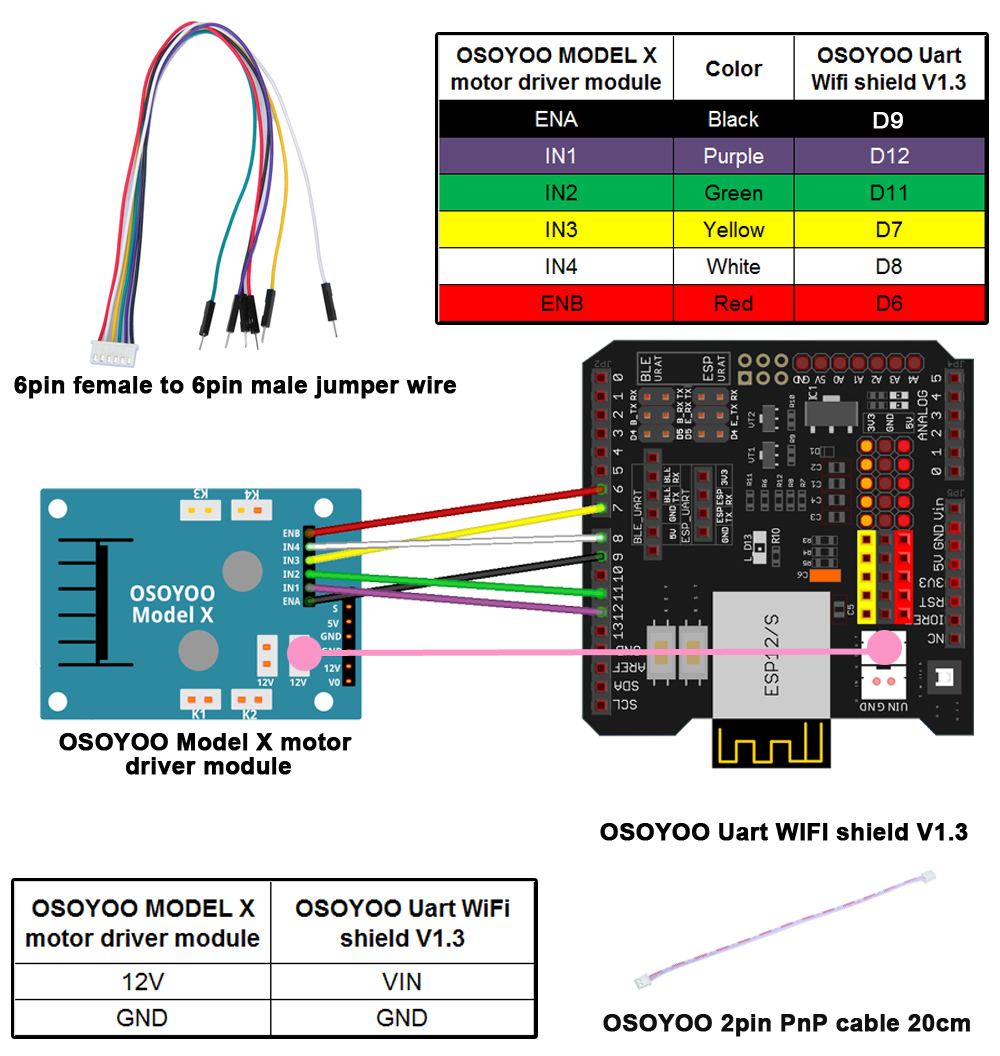
3) Connecter le module de pilotage de moteur OSOYOO MODEL X 6 broches de contrôle à OSOYOO Uart WiFi shield V1.3 D6, D7, D8, D9, D11, D12 avec un fil de liaison 6 broches mâle à 6 broches femelle, et la prise 12V-GND à la prise VIN-GND avec le câble OSOYOO 2 broches PnP 20cm comme indiqué dans le graphique suivant.
Attention :
Lorsque vous insérez/retirez cette fiche à 6 broches dans la prise mâle à 6 broches du modèle X, veuillez tenir le porte-broche en plastique pour effectuer l’opération. Ne tirez jamais sur les fils pour retirer la fiche de la prise, sous peine d’endommager les fils.
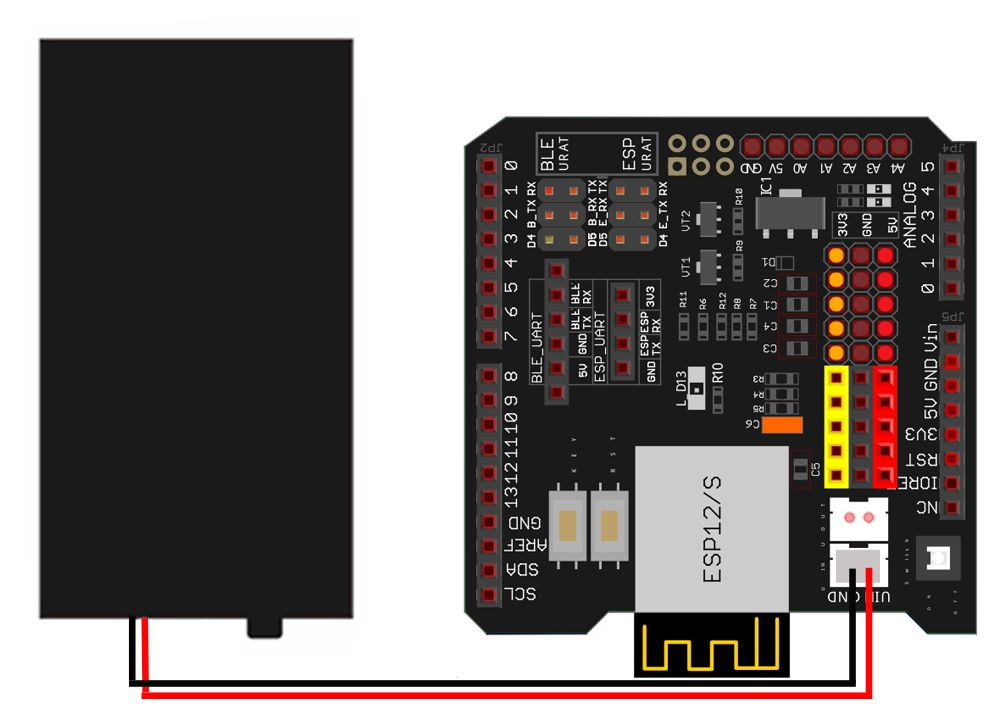
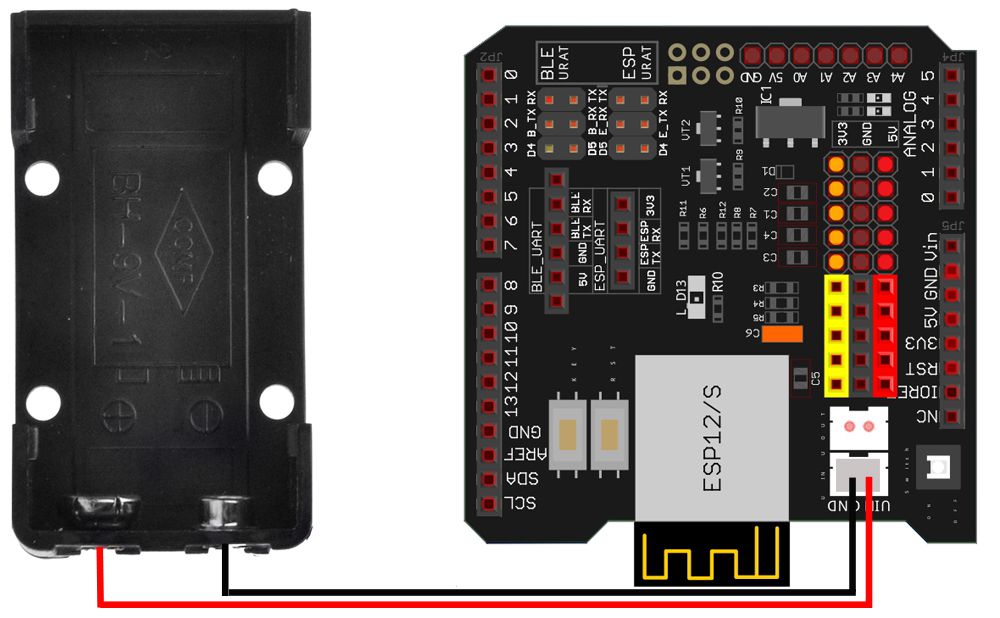
4) Connectez le boîtier de batterie (boîtier de batterie pour batteries 18650 ou pour batterie 9V) à la prise VIN-GND du bouclier OSOYOO Uart WiFi V1.3 selon le diagramme de connexion ci-dessous.
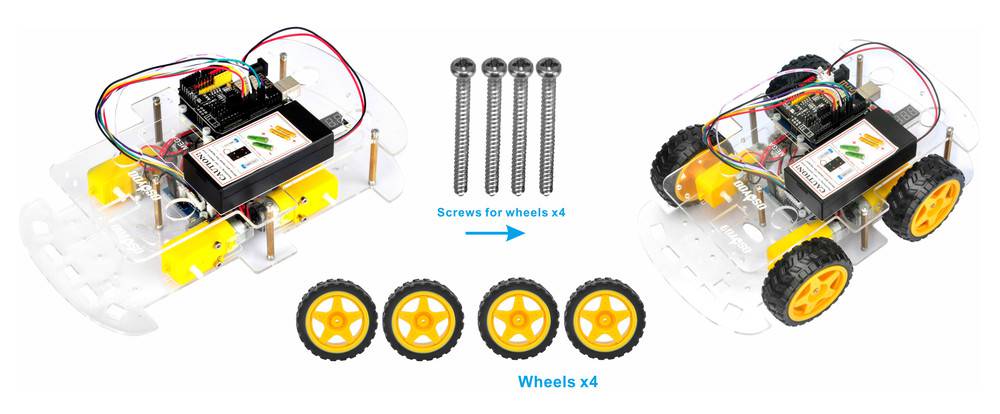
5) Connecter le châssis supérieur au châssis inférieur avec cinq piliers en cuivre et fixer les piliers en cuivre avec 10pcs M3*10 vis hexagonales, puis installer 4 roues sur les moteurs. (Veuillez desserrer les vis sur les roues si certaines d’entre elles ne bougent pas)
L’installation du matériel est presque terminée. Avant d’installer les batteries 18650 dans la boîte, nous devons graver le code d’exemple dans la carte.
Étape 1: Installer la dernière version de l’IDE (Si vous avez une version de l’IDE postérieure à 1.1.16, veuillez sauter cette étape). Télécharger l’IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en , puis installer le logiciel.
Étape 2: Téléchargez l’exemple de code de la première leçon surhttps://osoyoo.com/driver/v2smartcar-lesson1.zip, décompressez le fichier zip de téléchargement smartcar-lesson1.zip, vous verrez un dossier appelé v2smartcar-lesson1.
Étape 3: Connecter la carte au PC avec un câble USB, ouvrir Arduino IDE -> cliquer sur file -> cliquer sur Open -> choisir le code “v2smartcar-lesson1.ino” dans le dossier smartcar-lesson1, charger le code dans la carte.
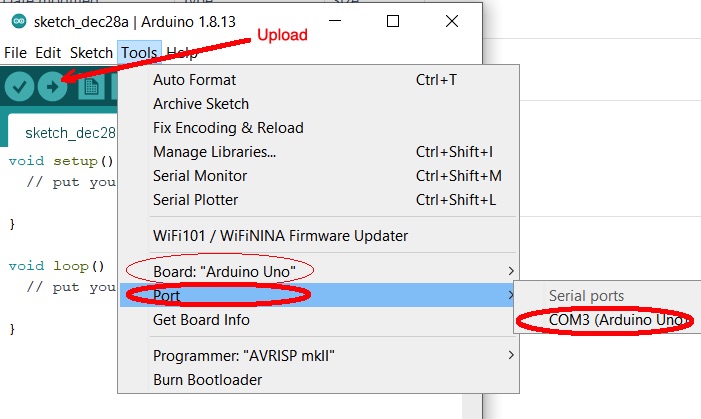
Étape 4: Choisissez la carte/le port correspondant à votre projet et téléchargez l’esquisse sur la carte.
Essais:
Remarque:
1) Recommandez les batteries 18650, car elles permettent à la voiture de fonctionner sans problème.
2) Les batteries 18650 que nous avons utilisées dans les cours ont une longueur d’environ 65 mm (2,56 pouces), sans circuit de protection interne.
3) Vérifiez les instructions de la boîte et assurez-vous que la direction polaire est correcte, sinon vous risquez de détruire votre appareil et de provoquer un incendie.
Veuillez installer vos piles 18650 dans le boîtier de piles 18650 en suivant les instructions suivantes:
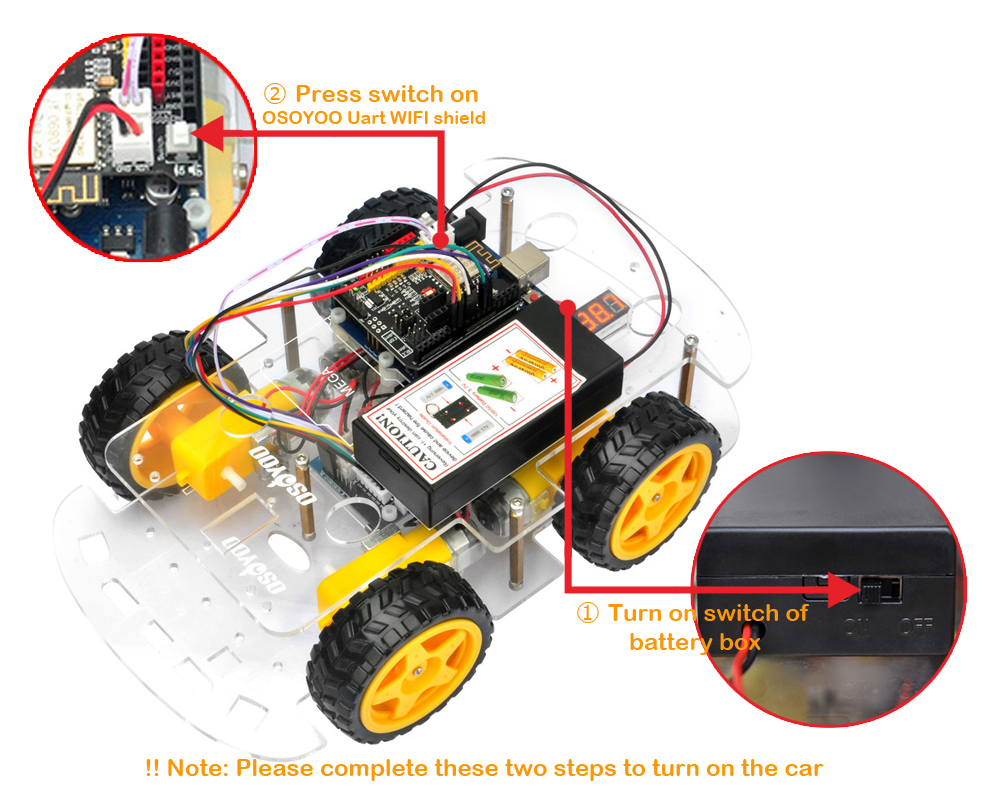
Déconnectez la voiture robot du PC, mettez la batterie dans le boîtier de batterie. Lorsque vous mettez la voiture sur le sol et allumez l’interrupteur sur OSOYOO Uart WIFI shield V1.3 et l’interrupteur sur la boîte de batterie si vous installez la boîte de batterie pour 18650, la voiture devrait avancer de 2 secondes, puis reculer de 2 secondes, puis tourner à gauche pendant 2 secondes, puis tourner à droite pendant 2 secondes, puis s’arrêter. (Si la voiture ne bouge pas comme indiqué ci-dessus, vous devez vérifier la connexion des fils, la tension de la batterie (doit être supérieure à 7.2v.))
Dépannage
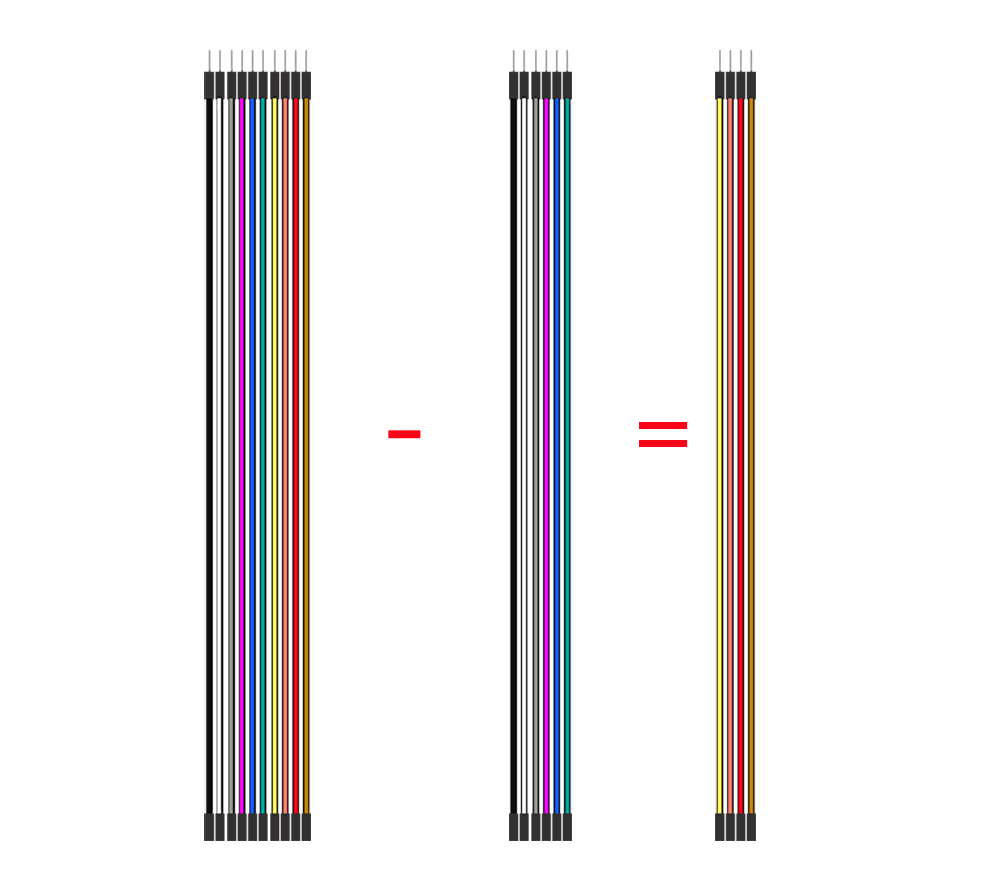
Si, après avoir exécuté le code de la leçon 1, vous remarquez qu’un côté des roues ne tourne pas, ou qu’un côté des roues peut uniquement avancer mais pas reculer, ou uniquement reculer mais pas avancer, le problème provient probablement d’un fil desserré ou cassé dans le câble à 6 broches reliant la carte Model X.
Voici la solution :
Étape 1: Débranchez le câble à 6 broches qui relie la carte Model X et la carte Arduino.
Étape 2: Trouvez six (6) fils de raccordement femelle-mâle de rechange dans votre kit (la couleur n’a pas d’importance).
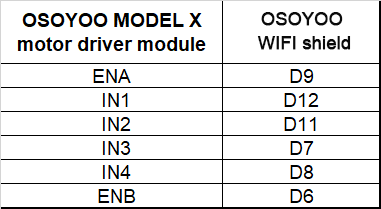
Étape 3: Utilisez ces six fils de raccordement pour reconnecter manuellement les broches du Model X (ENA, IN1, IN2, IN3, IN4, ENB) aux broches correspondantes de l’Arduino, conformément au schéma de câblage du Model X précédent
Étape 4: Retestez le code de la leçon 1 pour voir si le problème est résolu. Si le problème persiste, vous pouvez envoyer les détails de votre problème à [email protected] et notre équipe d’assistance technique vous aidera.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.







































Hi,
I connected everything per the tutorial and downloaded lesson 1 code, but car is not moving.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
The same is happening to me
Hi!
How can I reset from the fabric the robot car?
Thanks in advance.
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
Please paste the error and send to my email address: [email protected].
Please help me.
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
The error message generated is here..
Arduino: 1.8.19 (Windows 10), Board: “Arduino Uno”
Sketch uses 1442 bytes (4%) of program storage space. Maximum is 32256 bytes.
Global variables use 9 bytes (0%) of dynamic memory, leaving 2039 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xd4
Problem uploading to board. See https://support.arduino.cc/hc/en-us/sections/360003198300 for suggestions.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
/usr/local/bin/arduino-cli compile –fqbn arduino:avr:uno –libraries /home/builder/opt/libraries/latest –build-cache-path /tmp –output-dir /tmp/072211837/build –build-path /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167 /tmp/072211837/sketch_jul24a
Compiling sketch…
/home/builder/.arduino15/packages/arduino/tools/avr-gcc/7.3.0-atmel3.6.1-arduino7/bin/avr-g++ -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -MMD -flto -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10607 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/cores/arduino -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/variants/standard /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp -o /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp.o
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void setup()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:89:6: error: redefinition of ‘void setup()’
void setup()
^~~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:5:6: note: ‘void setup()’ previously defined here
void setup() {
^~~~~
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void loop()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:112:6: error: redefinition of ‘void loop()’
void loop(){
^~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:9:6: note: ‘void loop()’ previously defined here
void loop() {
^~~~
Error during build: exit status 1
Do you mean you can’t select coms port when you upload the code of lesson1?
Or when you select the correct coms, there is a error.
If you can’t find the coms port, please follow the video to install the driver: https://www.youtube.com/watch?v=mDrV8b1E6zI
Hi,
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
I have checked the video, and find that you have lost a 2Pin PnP cable from Wifi Uart to Model X: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson1/1.jpg. so that there is no power to Model X.
Please try it again.
Elaine
i put the code in and only 2 moters were moveing then nothing happend
Please take photos about your connection of the robot and send to my email address: [email protected]
Arduino:1.8.19 (Windows 10), Tarjeta:”Arduino Uno”
v2smartcar-lesson2:13:2: error: ‘IRrecv’ does not name a type
IRrecv IR(IR_PIN); // IRrecv object IR get code from IR remoter
^~~~~~
v2smartcar-lesson2:14:2: error: ‘decode_results’ does not name a type
decode_results IRresults;
^~~~~~~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void do_IR_Tick()’:
v2smartcar-lesson2:95:6: error: ‘IR’ was not declared in this scope
if(IR.decode(&IRresults))
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:95:6: note: suggested alternative: ‘ISR’
if(IR.decode(&IRresults))
^~
ISR
v2smartcar-lesson2:95:17: error: ‘IRresults’ was not declared in this scope
if(IR.decode(&IRresults))
^~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void setup()’:
v2smartcar-lesson2:168:3: error: ‘IR’ was not declared in this scope
IR.enableIRIn();
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:168:3: note: suggested alternative: ‘ISR’
IR.enableIRIn();
^~
ISR
exit status 1
‘IRrecv’ does not name a type
Este informe podría contener más información con
“Mostrar salida detallada durante la compilación”
opción habilitada en Archivo -> Preferencias.
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
What is the set_Motorspeed used for in the arduino code?
Why is the car humming when I turn it on?
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
I’ve sent you the email about that.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
Please change the wires from Model X to Wifi shield. If the issue occurs again, please contact with my email: [email protected]
Hi,
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
I checked wire connection OK
I check PINS OK
Any idea please ?
Thanks a lot
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
Hi, how much weight can it hold/carry?
This is an acrylic robot car for learning how to use Arduino to code. If you want to a robot to carry heavy weight, please visit our product: https://osoyoo.com/2022/07/05/v2-metal-chassis-mecanum-wheel-robotic-for-arduino-mega2560-introduction-model-2021006600/
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.