Dans ce tutoriel, nous allons utiliser OSOYOO Sport Car pour Arduino pour faire quelques mouvements simples. Une fois l’installation de la voiture terminée, il est très important de tester l’installation et l’exemple de code. Si vous avez réussi le mouvement de test de cette leçon, cela signifie que la carte de base OSOYOO pour Arduino, le module de commande du moteur, les moteurs, les batteries, le châssis et les connexions filaires entre ces pièces fonctionnent bien.
Si vous ne terminez pas le châssis de la voiture, veuillez consulter la leçon 1
Étape 1 : Téléchargez le fichier zip de la bibliothèque PWMServo à partir de https://osoyoo.com/driver/sg90car/PWMServo.zip,
puis importez la bibliothèque dans Arduino IDE (Ouvrez Arduino IDE → cliquez sur Esquisse → Inclure la bibliothèque → Ajouter.Zip Bibliothèque)
Vous verrez une fenêtre pop-up, maintenant, vous pouvez aller dans votre dossier de téléchargement et sélectionner PWMServo.zip fichier et télécharger ce fichier dans la bibliothèque Arduino.
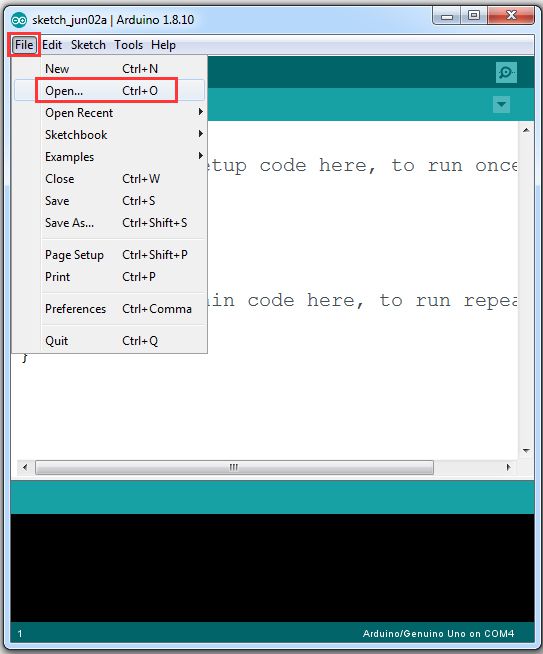
Étape 2 : Téléchargez l’exemple de code de la leçon 2, décompressez le fichier zip de téléchargement sg90car-lesson2b.zip, vous verrez un dossier appelé sg90car-lesson2. Étape 3 : Connectez la carte UNO R3 au PC avec un câble USB, ouvrez Arduino IDE → cliquez sur fichier → cliquez sur Ouvrir → choisissez le code « sg90car-lesson2.ino » dans le dossier sg90car-lesson2, chargez le code dans OSOYOO Basic Board for Arduino. Remarque : Coupez votre batterie ou débranchez votre adaptateur secteur lorsque vous téléchargez le code d’esquisse sur OSOYOO Basic Board for Arduino.
Étape 4 : Remplacez la valeur par défaut 90 de la ligne 19 par la valeur FRONT de la leçon 1. Si vous alignez manuellement la direction de la roue comme option 1 de l’étape 5 de la leçon 1, ignorez cette étape.
#define FRONT 90 // steering to front
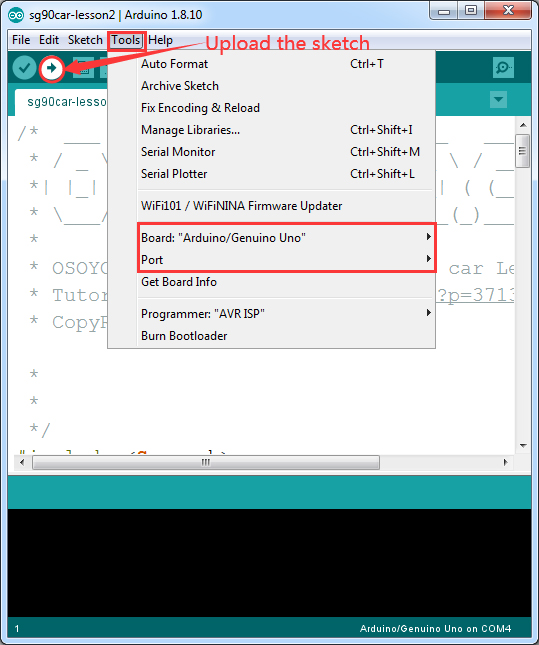
Étape 5 : Choisissez la carte / port correspondant à votre projet, téléchargez l’esquisse sur le tableau.
Essais finaux
1. Déconnectez OSOYOO Basic Board for Arduino du PC et confirmez que l’interrupteur d’alimentation de l’OSOYOO Motor Shield est éteint, puis mettez une batterie 9V dans le boîtier de la batterie. (Remarque : assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie).
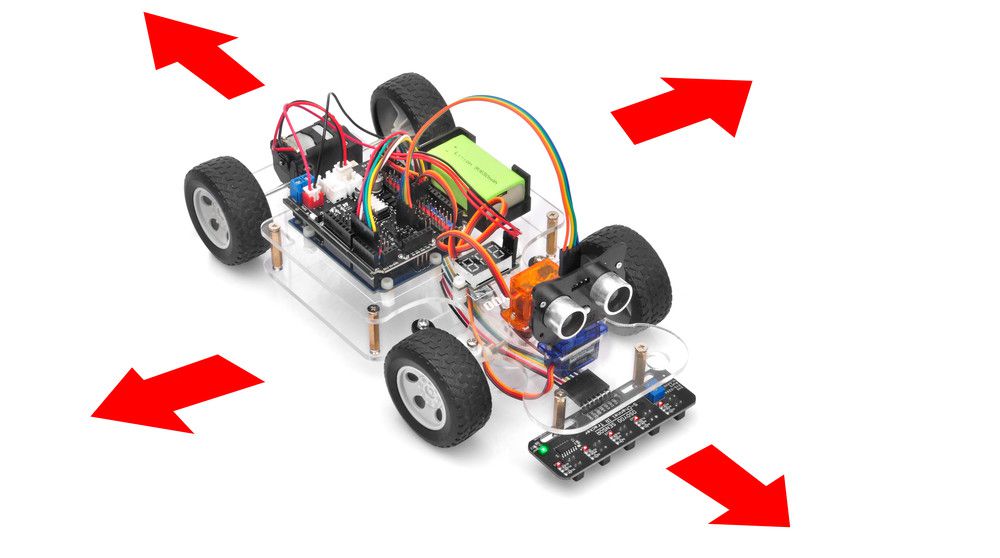
2. Mettez la voiture au sol, allumez l’interrupteur d’OSOYOO Motor Shield, la voiture doit avancer, reculer, tourner à gauche, tourner à droite, reculer, revenir à droite, revenir à gauche, puis s’arrêter. Remarque : Si la voiture ne bouge pas selon le résultat mentionné ci-dessus, vous devez vérifier votre connexion filaire, les capuchons de cavalier sur OSOYOO Motor Shield, la tension de la batterie (doit dépasser 7,2 v).
3. Si vous souhaitez changer l’ange de droite ou de gauche, veuillez modifier les lignes 20 et 21 du code et télécharger à nouveau le croquis : (Remarque : l’ange ne peut pas être réglé plus de 35. Les roues arrièresont entraînées sans différentiel d’essieu arrière entre le moteur et les roues. Mais les quatre roues ont une bonne adhérence sur le sol. Plus les roues avant sont tournées vers la gauche ou la droite, plus elles freinent contre les roues arrière. En commençant par un certain angle, cette force de freinage est plus grande que la force motrice du moteur – alors le moteur s’arrêtera.)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
4. Si vous souhaitez modifier la vitesse de la voiture, veuillez réviser le code suivant du croquis (Remarque : la valeur maximale est 255)