Dans cette leçon, nous réaliserons un projet de conduite automatique avec suivi de ligne. Nous ajouterons un module de capteur de suivi à 5 points à la voiture robotique construite dans la leçon 1. Le logiciel de cette leçon lira les données du module de capteur de suivi à 5 points et guidera automatiquement la voiture intelligente pour se déplacer le long de la ligne de piste noire sur le sol blanc.
La leçon 1 doit être terminée avant de réaliser ce projet de suivi de ligne.
OSOYOO Châssis de voiture robotique à roues Mecanum x1
OSOYOO Roues et moteurs x4 (roues gauche x2/roues droite x2)
OSOYOO Carte Mega2560, entièrement compatible avec Arduino UNO/Mega2560 x1
OSOYOO Module Uart Wi-Fi x1
OSOYOO Carte de pilote modèle Y x1
OSOYOO Voltmètre x1
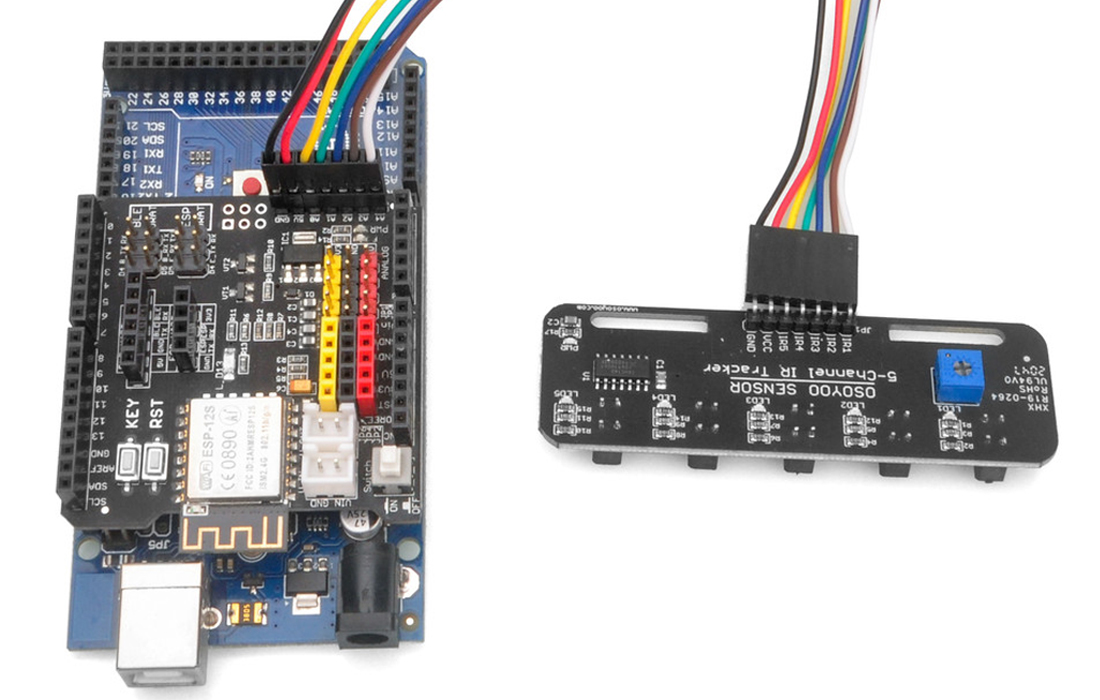
OSOYOO Module de capteur de suivi à 5 points x1
OSOYOO Boîtier de batterie x1
OSOYOO Câble de raccordement femelle-femelle à 3 broches x1
OSOYOO Câble de raccordement mâle-femelle à 6 broches x2
OSOYOO Câble de raccordement femelle-femelle à 7 broches x1
OSOYOO Connecteur femelle-femelle à 2 broches XH.25 x1
Batteries 18650 (3,7V) x2
Chargeur de batterie x1
1)Veuillez conserver toutes les connexions de la leçon 1 telles quelles. (N’oubliez pas : NE RETIREZ PAS les fils déjà installés lors de la leçon 1).
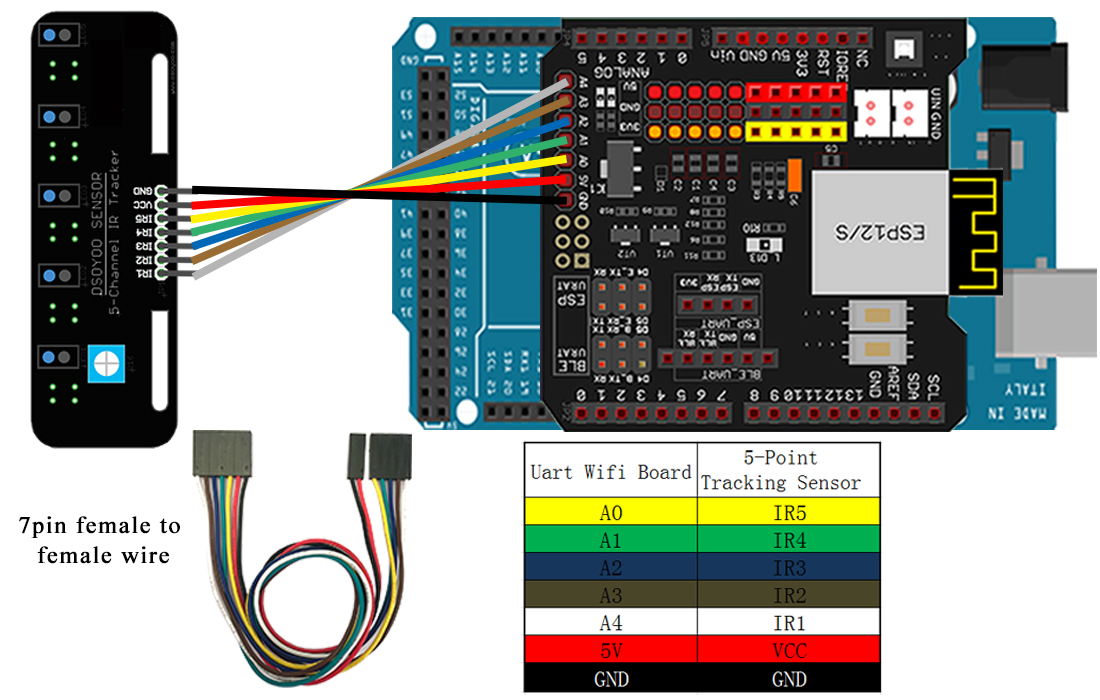
2)Connectez la broche GND-VCC du module de capteur de suivi à la broche GND-5V de l’OSOYOO Uart Wi-Fi shield V1.3 ; connectez les broches IR1, IR2, IR3, IR4, IR5 aux broches A4, A3, A2, A2, A1 avec un câble femelle-femelle de 7 broches et de 25 cm comme le montre la photo suivante.
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous avez une version de l’IDE Arduino supérieure à 1.1.16, passez cette étape). Téléchargez l’IDE Arduino à partir de https://www.arduino.cc/en/Main/Software?setlang=en, puis installez le logiciel.
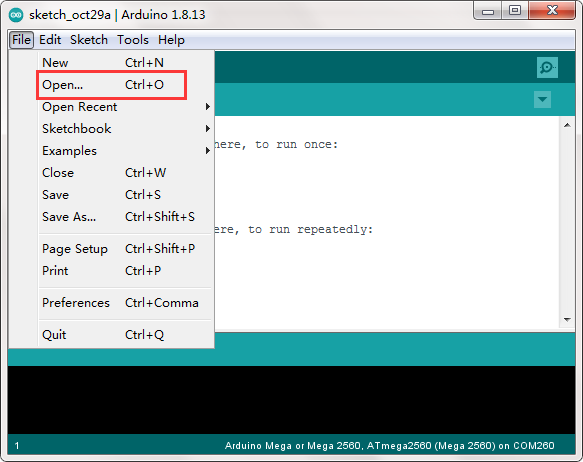
Étape 3 : Connectez la carte Mega2560 à l’ordinateur avec un câble USB, ouvrez l’IDE Arduino → cliquez sur Fichier → cliquez sur Ouvrir → choisissez le code “lesson3.ino” dans le dossier lesson3, chargez le code dans Arduino.
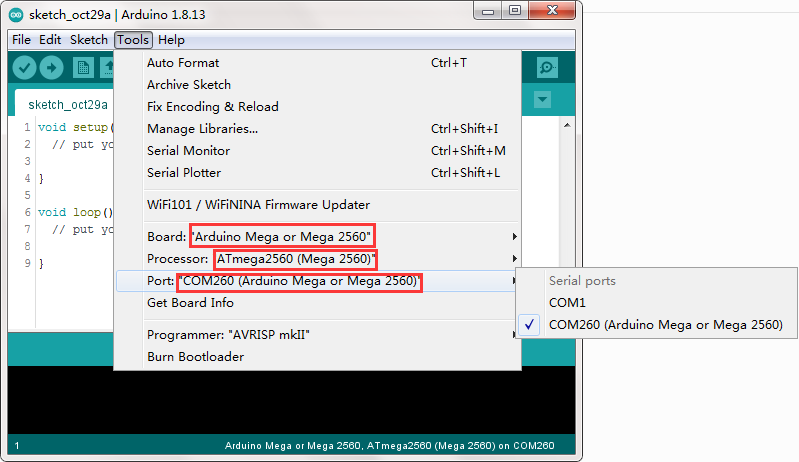
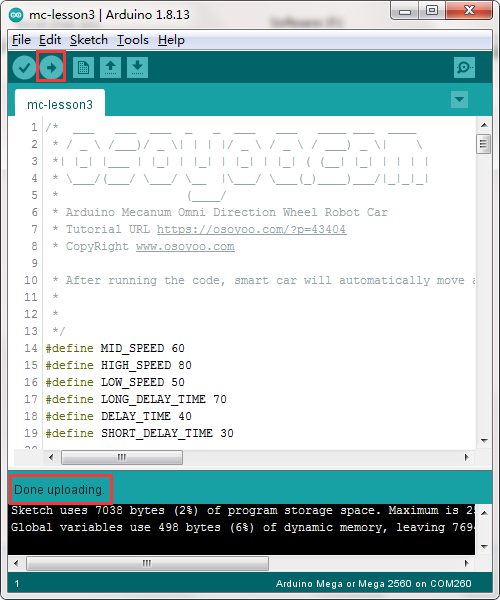
Étape 4 : Choisissez la carte/port correspondant à votre projet, téléversez le programme sur la carte.
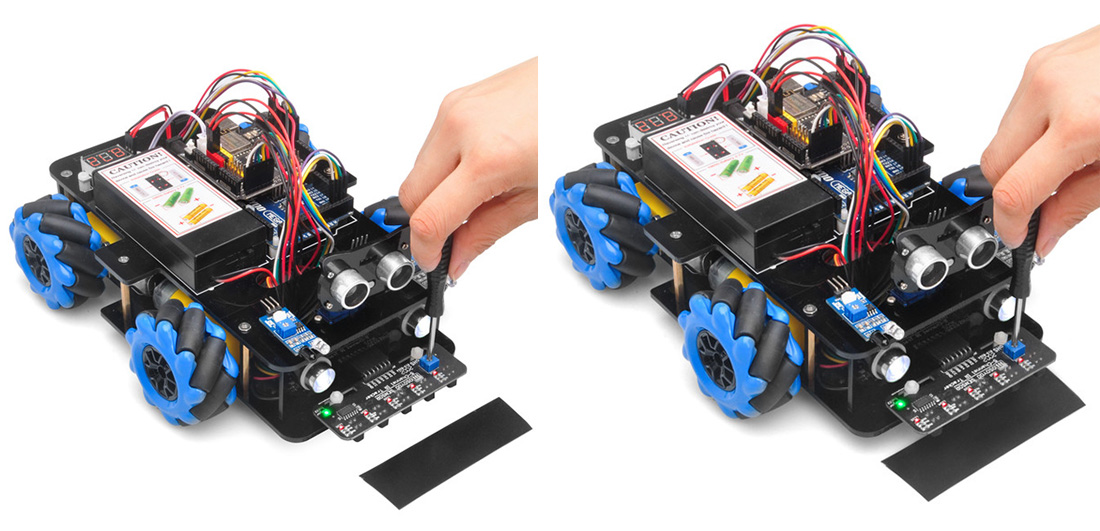
Ajustez la sensibilité des modules de capteur de suivi.
Allumez la boîte à piles et tenez la voiture tout en ajustant le potentiomètre sur le capteur de suivi avec un tournevis cruciforme jusqu’à obtenir le meilleur état de sensibilité : la LED du signal s’allumera lorsque le capteur est au-dessus de la piste noire, et la LED du signal s’éteindra lorsque le capteur est au-dessus du sol blanc.
Test final :
Préparez une piste noire (la largeur de la piste noire doit être supérieure à 20 mm et inférieure à 30 mm) sur le sol blanc. Veuillez noter que l’angle de virage de la piste ne doit pas être trop prononcé, sinon la voiture sortira de la piste.
Allumez la voiture et placez le milieu du module de capteur de suivi au-dessus de la piste noire, puis la voiture se déplacera le long de la piste noire.