Dans cette leçon, nous allons installer 2 capteurs de distance infrarouge sur une voiture robot et programmer la voiture pour suivre les mouvements des objets. La voiture reçoit le signal des capteurs de distance infrarouge, puis le programme conduira la voiture à prendre des actions.
Vous devez terminer la leçon 1 (assemblage de la voiture) avant de commencer cette leçon.
Vidéo d’installation de la voiture robot OSOYOO : https://osoyoo.com/manual/2021006600.html
Châssis de voiture robotique à roues mécanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauches x2/roues droites x2)
Carte OSOYOO Mega2560, entièrement compatible avec Arduino UNO/Mega2560 x1
Module Wi-Fi Uart OSOYOO x1
Carte de commande modèle Y OSOYOO x1
Voltmètre OSOYOO x1
Capteurs de distance infrarouge OSOYOO x2
Boîtier de batterie OSOYOO x1
Câble de pontage femelle-femelle 3 broches OSOYOO x1
Câble de pontage mâle-femelle 6 broches OSOYOO x2
Câble de pontage mâle-femelle 10 broches OSOYOO x1
Câble femelle-femelle XH.25 à 2 broches OSOYOO x1
Batteries 18650 (3,7V) x2
Chargeur de batterie x1
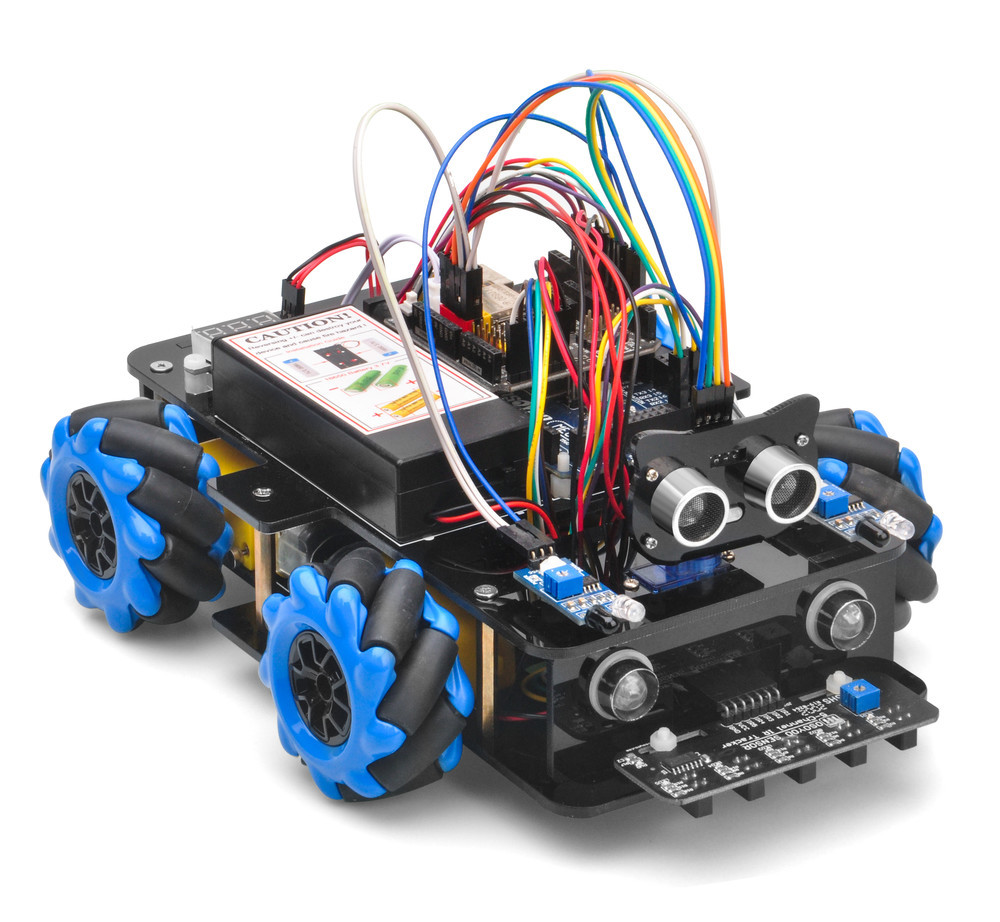
Étape 1 : Installez le cadre de base de la voiture intelligente comme indiqué dans la leçon 1 de la voiture intelligente. Si vous avez déjà terminé l’installation dans la leçon 1, laissez-la telle quelle.
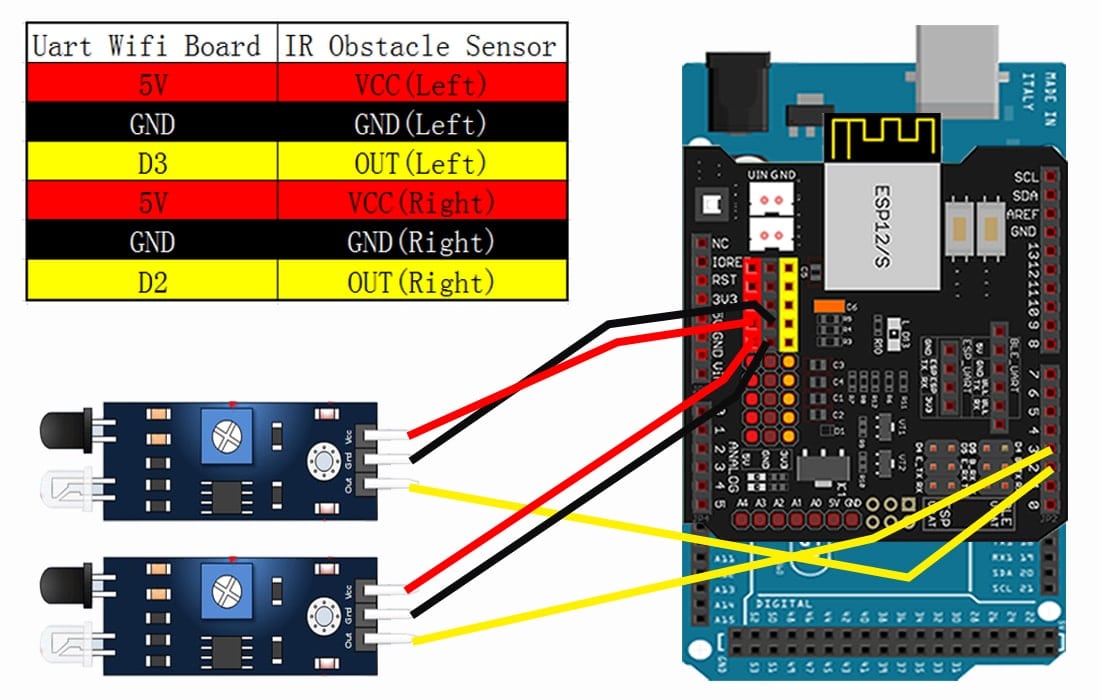
Étape 2 : Connectez les modules de capteurs de distance infrarouge comme indiqué dans le schéma de connexion ci-dessous. (N’oubliez pas : NE retirez PAS les fils existants installés dans la leçon 1).
Étape 1 : Installez la dernière version de l’IDE Arduino (Si vous avez une version de l’IDE Arduino après 1.1.16, passez cette étape). Téléchargez l’IDE Arduino depuis https://www.arduino.cc/en/Main/Software?setlang=en, puis installez le logiciel.
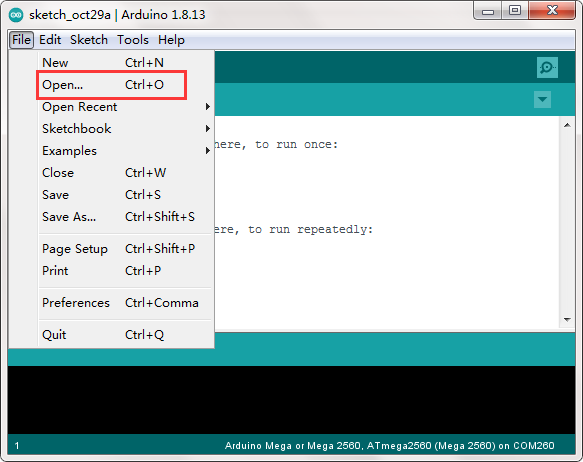
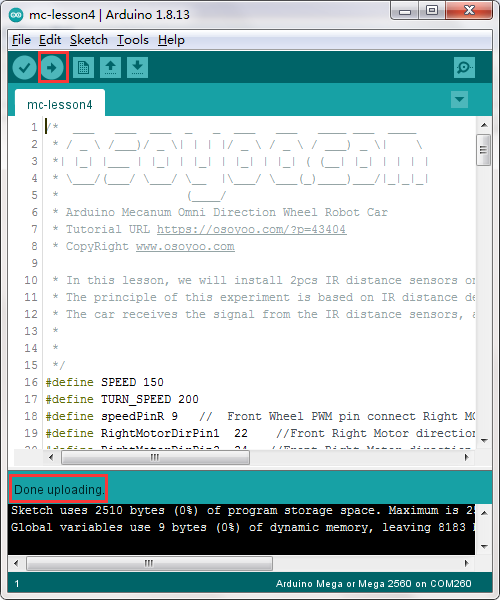
Étape 3 : Connectez la carte Mega2560 au PC avec un câble USB, ouvrez l’IDE Arduino → cliquez sur Fichier → cliquez sur Ouvrir → choisissez le code “lesson4.ino” dans le dossier lesson4, chargez le code dans Arduino.
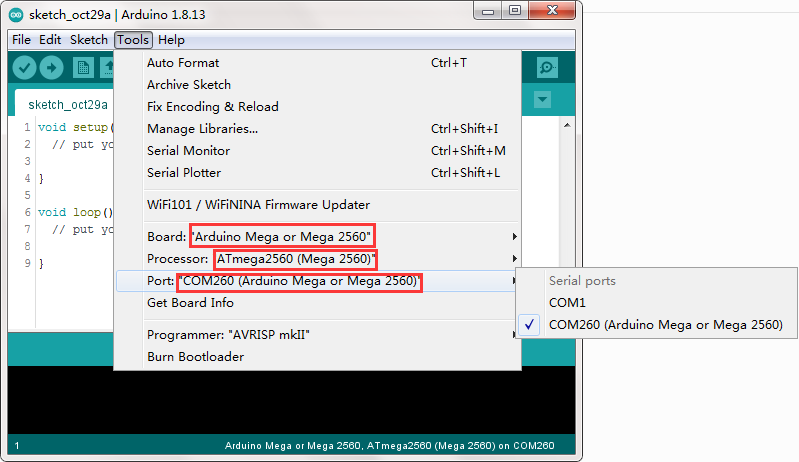
Étape 4 : Choisissez la carte/port correspondant à votre projet, téléchargez le croquis sur la carte.
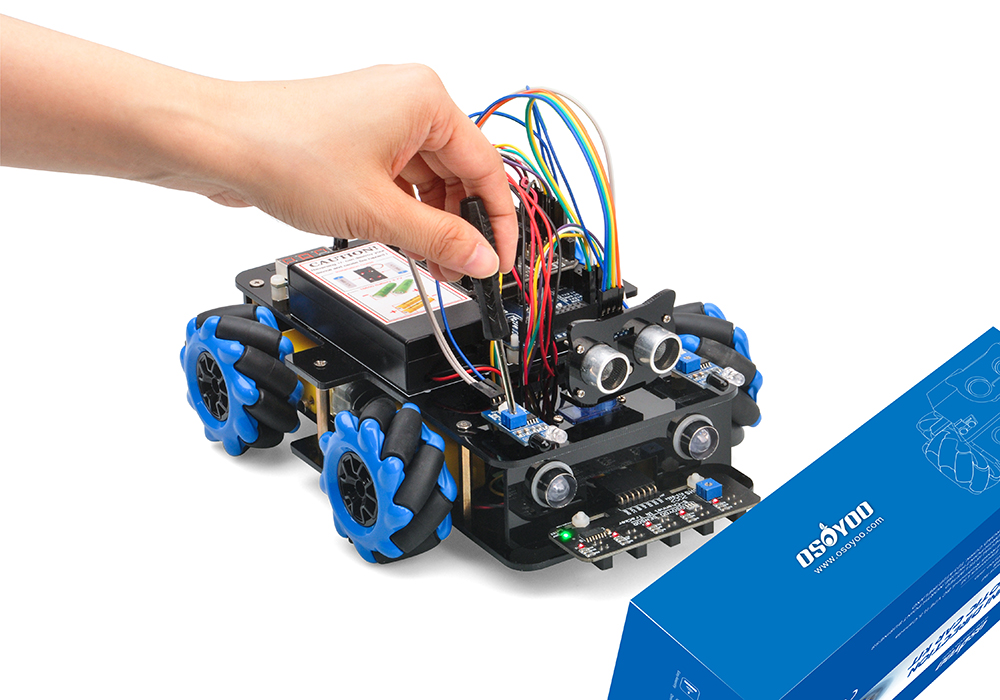
Étape 5 : Allumez la voiture, placez un objet à environ 10 cm devant chaque capteur de distance infrarouge et ajustez le potentiomètre sur les capteurs de distance infrarouge pour détecter l’objet ou votre main.
Note : Lorsque ces modules infrarouges détectent des objets, le témoin d’alimentation et le témoin de signal sont allumés. Lorsqu’aucun objet n’est détecté, seul le témoin d’alimentation est allumé et le témoin de signal est éteint. Si le témoin de signal est toujours allumé même s’il n’y a pas d’obstacle devant le capteur, vous devez ajuster le potentiomètre.
Allumez la voiture, placez votre main devant la voiture, puis la voiture se déplacera vers votre main comme si vous la tiriez. Elle avance lorsque les deux modules d’évitement d’obstacles infrarouges détectent votre main ; elle tourne à droite si seul le module d’évitement d’obstacles infrarouge droit détecte un objet ; elle tourne à gauche si seul le capteur de distance infrarouge gauche détecte un objet. Lorsque votre main est à plus de 10 cm devant, elle s’arrête.
yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.











yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.