L’encodeur est normalement utilisé pour l’algorithme PID. À l’heure actuelle, notre voiture Mecanum n’a pas besoin de la fonction PID, nous n’écrivons donc pas de programme d’encodeur pour cette voiture.
De nombreux utilisateurs ont acheté un moteur à engrenages DC OSOYOO pour le robot Tank, le robot à roue Mecanum et la voiture Balance qui a un encodeur intégré. Certains d’entre eux sont intéressés par la façon de programmer l’encodeur. Nous fournissons un programme simple qui guide l’utilisateur dans l’utilisation de la carte de base OSOYOO pour Arduino pour lire le nombre d’impulsions que les encodeurs envoient à Arduino à chaque rotation.
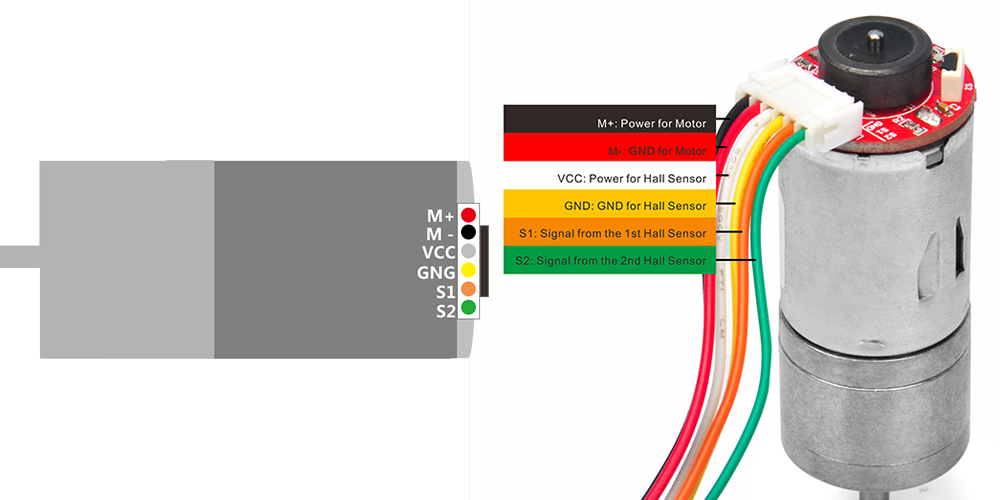
Maintenant, la dernière version des moteurs est livrée sans capuchons de protection comme l’image ci-jointe. Le capuchon de protection du moteur se décolle facilement, nous retirons donc ce capuchon.
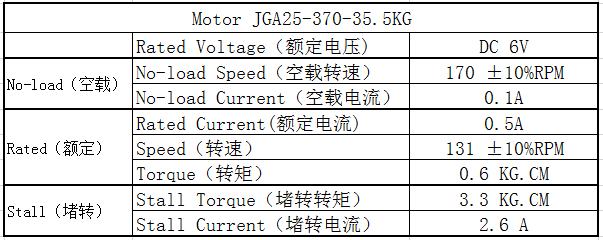
Fiche de données:JGA25-370-35.5KG
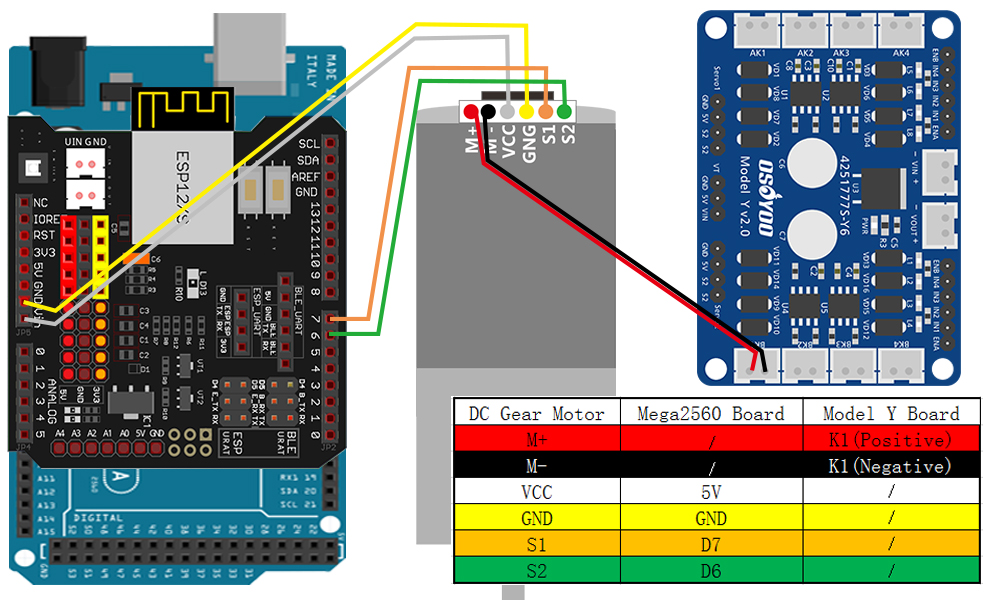
Connexion:
Moteur pas à pas
Carte de base OSOYOO pour Arduino
ligne blanche(V- Power))
VCC
Ligne jaune(G-GND
GND
Orange (S1)
D7
Vert (S2)
D6
Certains modules peuvent avoir une ligne V Power/G-GND inversée. Si le code suivant ne fonctionne pas, veuillez basculer la ligne jaune sur 5V et la ligne blanche sur Arduino GND.
Une fois que vous chargez le code dans Arduino IDE, ouvrez le moniteur série dans le coin supérieur droit.
Installez maintenant une roue sur le moteur à engrenages à courant continu et faites-la tourner à la main. Faites ensuite tourner la roue à 360 degrés et arrêtez-vous. Vous verrez que l’écran du moniteur série affichera:
La dernière ligne affiche la position 151 . Cela signifie que lorsque vous faites pivoter le moteur à 360 degrés, le capteur Hall a généré 151 impulsions. donc mon moteur a environ 150 impulsions par rotation.
Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay












Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay
hi, Clay,
You can buy the IR obstacle sensor in https://osoyoo.store/products/ir-obstacle-avoidance-module-for-arduino-v2-0-robot-carmodel-2016000400?variant=31648429015151