Les roues omnidirectionnelles Mecanum sont une technologie puissante qui permet à une voiture robot de se déplacer dans n’importe quelle direction, y compris le déplacement latéral vers la gauche et la droite.
Dans ce projet, nous allons démontrer comment utiliser Arduino pour contrôler une voiture robot de marque Osoyoo équipée de roues omnidirectionnelles Mecanum.
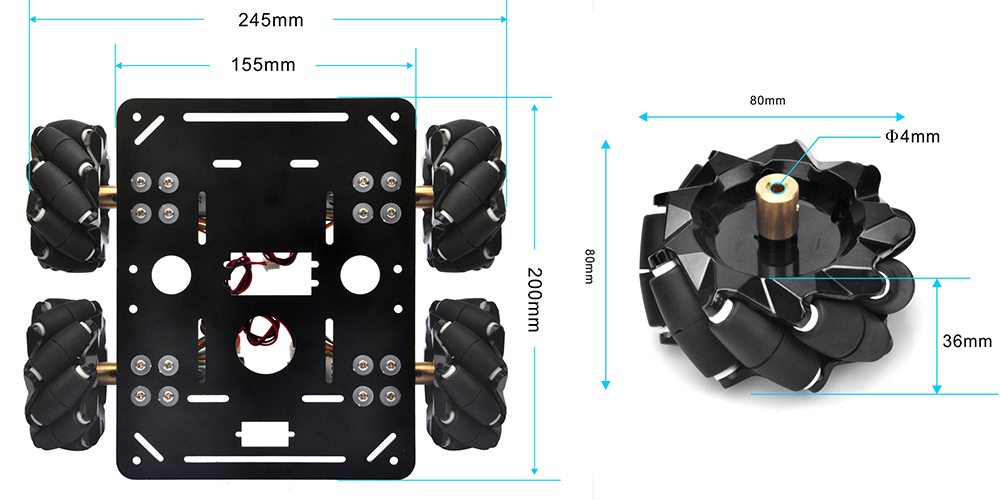
Châssis de voiture robotique OSOYOO Mecanum Wheels x 1 (2 roues gauches / 2 roues droites et moteur x 4)
Carte OSOYOO Mega2560 entièrement compatible avec Arduino
Bouclier WIFI OSOYOO V1.3 x 1
Pilote de moteur OSOYOO modèle Y x 1
Compteur de tension OSOYOO x1
Boîtier de batterie OSOYOO x 1
Fil de raccordement femelle à femelle OSOYOO 3 broches x1
Fil de connexion OSOYOO 6 broches mâle à femelle x2
OSOYOO 2 broches XH.25 femelle à femelle x1
2 piles 18650 (3,7 V)
Specifications:
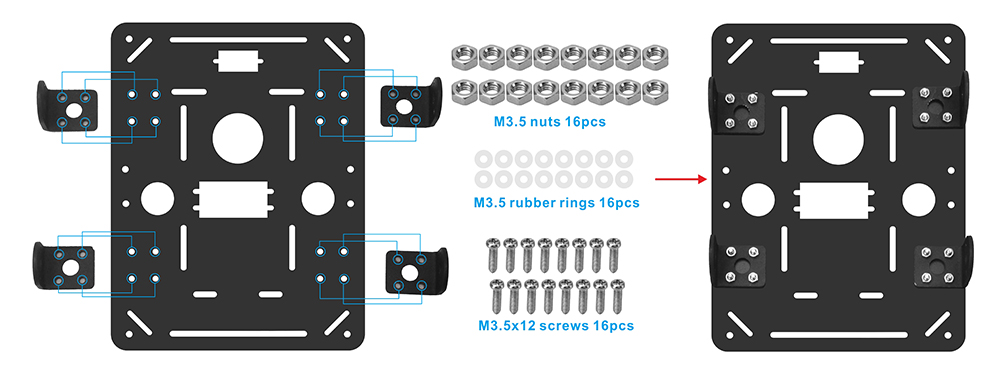
Étape 1. Installez le support en métal sur le châssis en métal avec 16 vis M3.5*12, des anneaux en caoutchouc M3.5 et des écrous M3.5 comme indiqué sur les images suivantes.
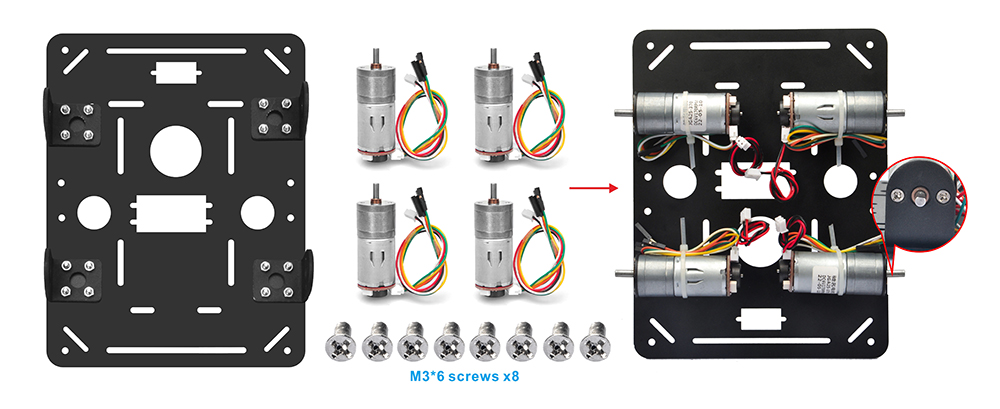
Étape 2. Installation de 8 vis M3*6 comme indiqué dans la zone rouge suivante.
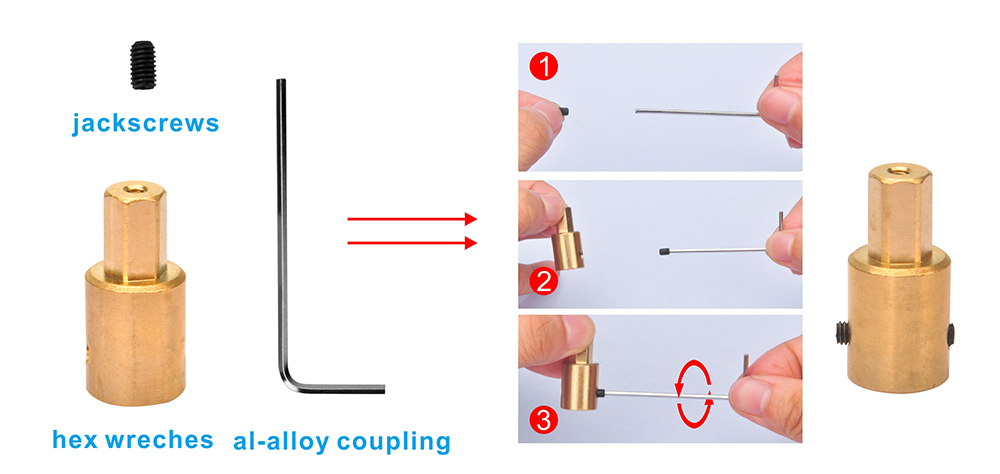
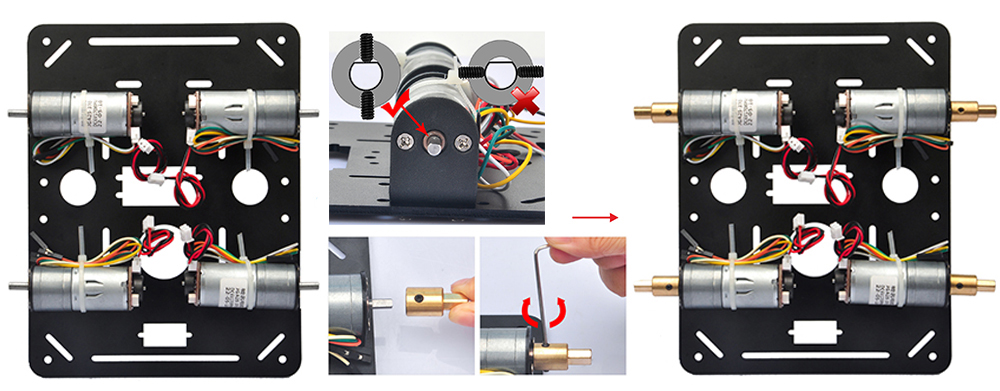
Étape 3. Installez les vis de réglage sur le couplage en alliage d’aluminium, serrez les vis de réglage pour fixer le couplage en alliage d’aluminium sur le moteur comme indiqué sur les images suivantes.
L’arbre du moteur a une zone plate. Assurez-vous que la vis de réglage est positionnée sur cette zone plate, et serrez les deux vis sur l’arbre comme indiqué sur les images suivantes.
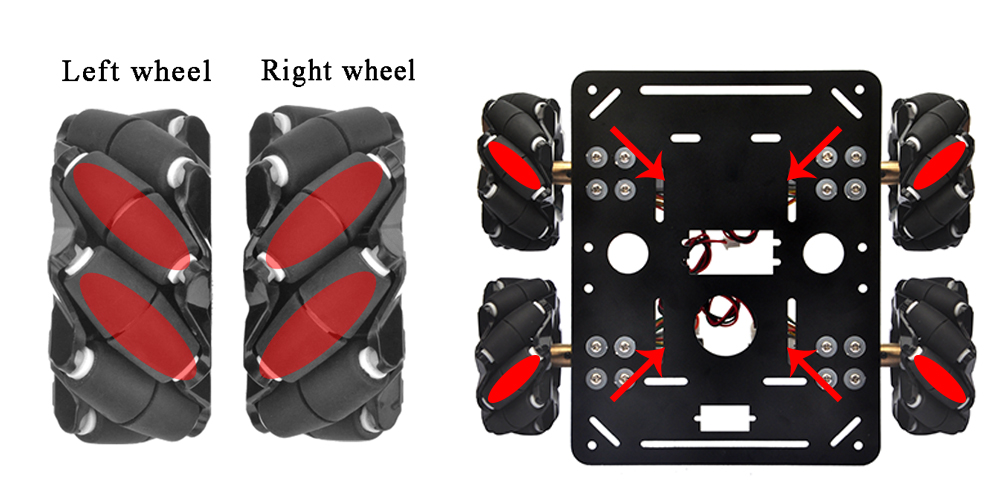
Étape 4. Installez les 4 roues Mecanum sur le couplage en alliage d’aluminium avec 4 vis M2,5*10 comme indiqué sur les images suivantes.
Il existe deux types de roues Mecanum, les roues Mecanum gauche et droite ; la différence entre les deux est l’orientation des rouleaux. Pour une roue Mecanum de type A, comme indiqué ci-dessous, les rouleaux sont orientés du bas droit vers le haut gauche. Les rouleaux pour les roues de type B sont installés de manière opposée.
Une configuration correcte nécessite que chacune des quatre roues soit réglée comme indiqué ci-dessous, où l’axe de rotation du rouleau supérieur de chaque roue pointe vers le centre de la plateforme. Veuillez noter que toutes les analyses dynamiques et les codes pré-écrits sont basés sur cette configuration.
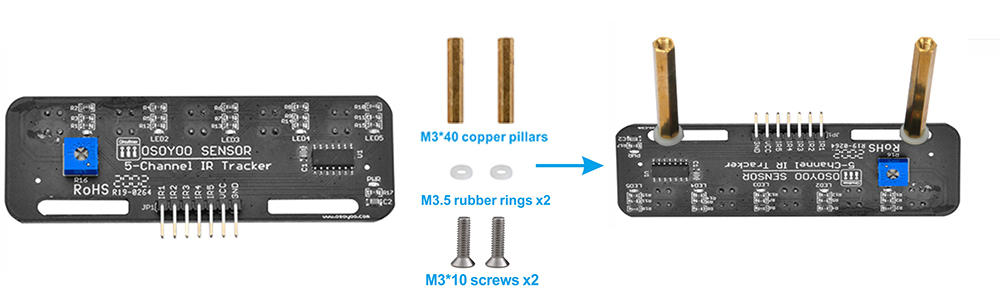
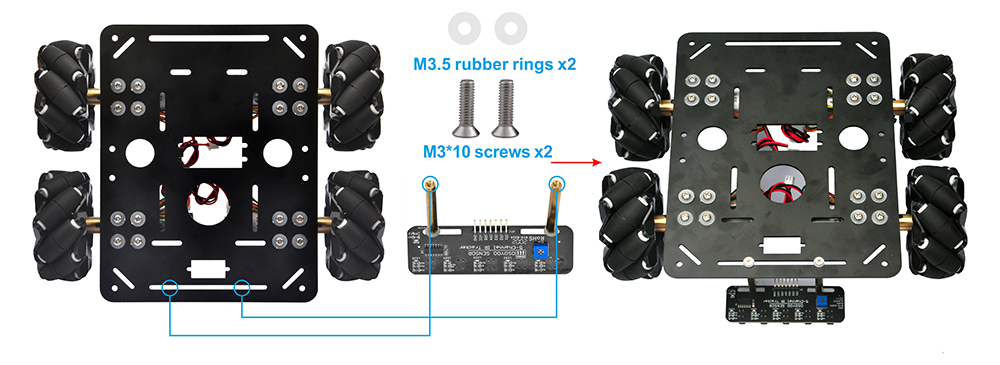
Étape 5. Installez 2 piliers en cuivre M3x40 avec 2 vis M3 et 2 anneaux en caoutchouc M3,5 sur le capteur de suivi comme indiqué sur les images suivantes.
Étape 6. Nous ajouterons un module de capteur de suivi à 5 points sur le châssis de la voiture avec des écrous M3 comme indiqué sur les images suivantes.
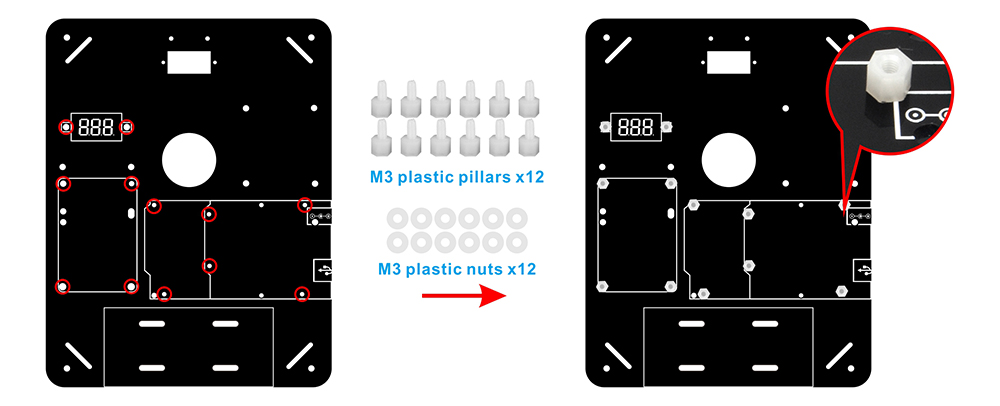
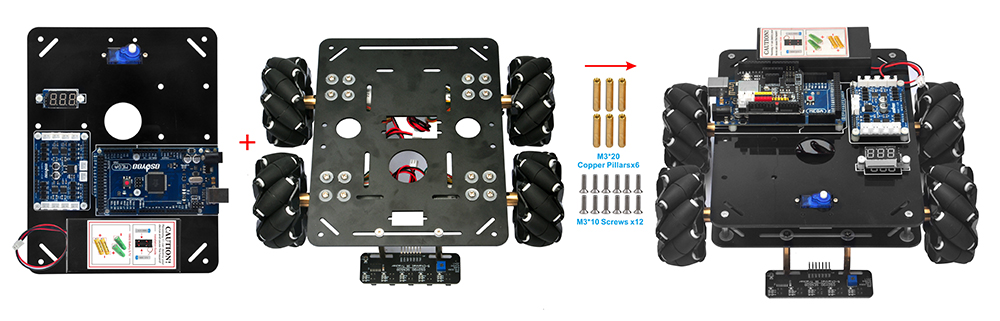
Étape 7. Installez 12 piliers et écrous en plastique M3 sur la planche acrylique comme sur les images suivantes.
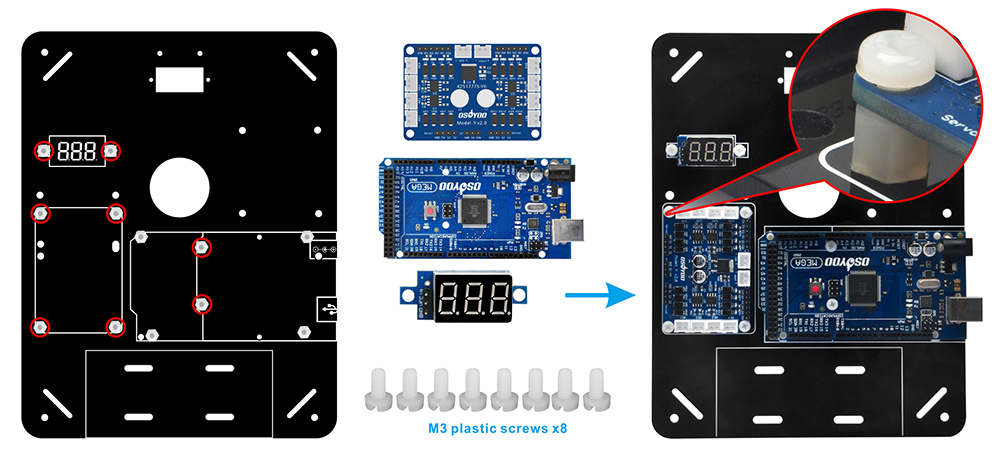
Étape8. Installez 1 carte osoyoo Mega2560, 1 carte de pilote de moteur modèle Y et 1 voltmètre sur un châssis en acrylique avec les 8 vis en plastique M3 comme sur les images suivantes.
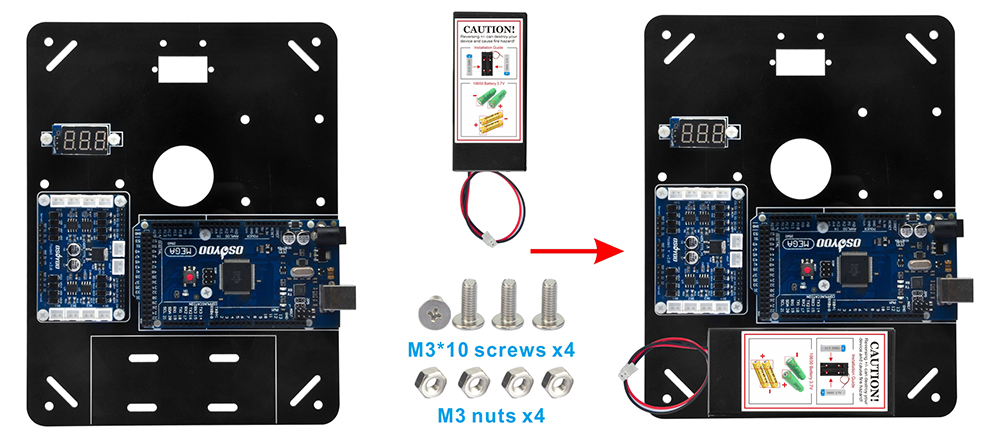
Step9.Installez le boîtier de batterie avec 4 vis et écrous M3x10 comme illustré ci-dessous.
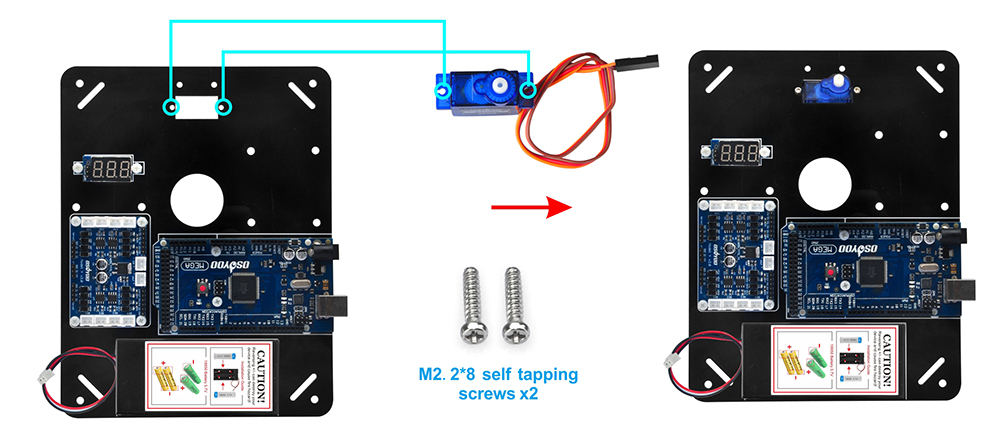
Step10.Installez le servo SG90 sur le châssis en acrylique avec 2 vis autotaraudeuses M2.2 * 8 comme sur les images suivantes.
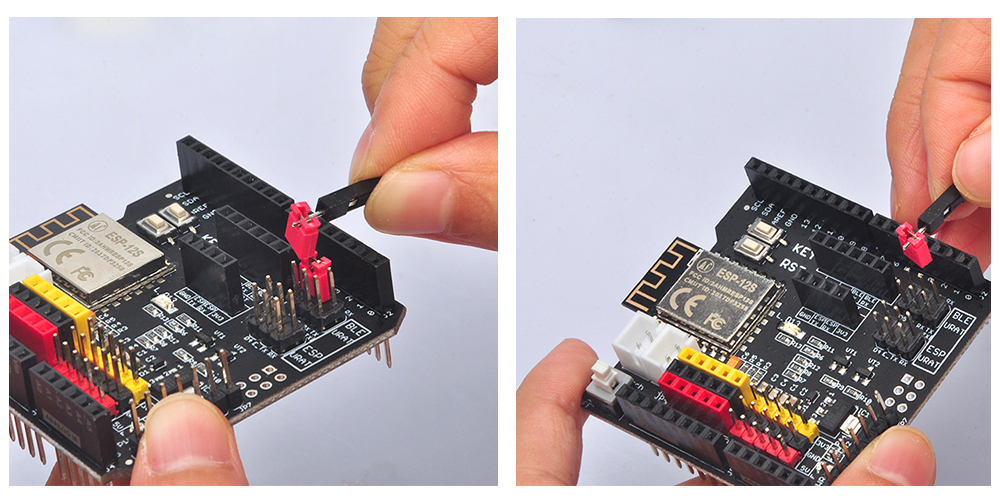
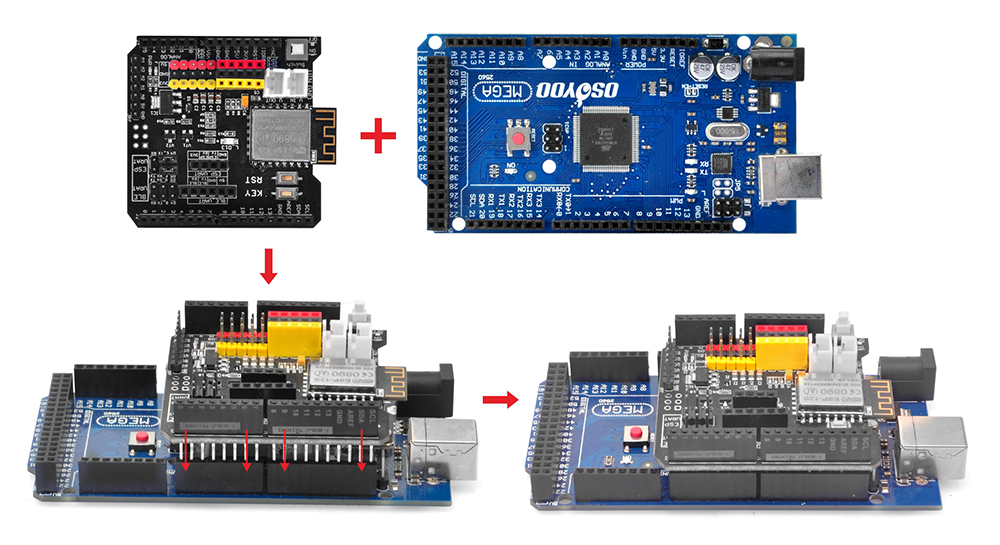
Step11. Retirez le capuchon de cavalier rouge du bouclier wifi et insérez le bouclier wifi OSOYOO dans la carte Arduino Mega2560 comme les images suivantes.
Step12.Installez le châssis en acrylique sur un châssis en métal. Veuillez noter l’avant et l’arrière du châssis en acrylique et du châssis en métal.
Avant de connecter les fils, assurez-vous d’avoir déjà inséré le bouclier WIFI OSOYOO sur la carte MEGA2560.
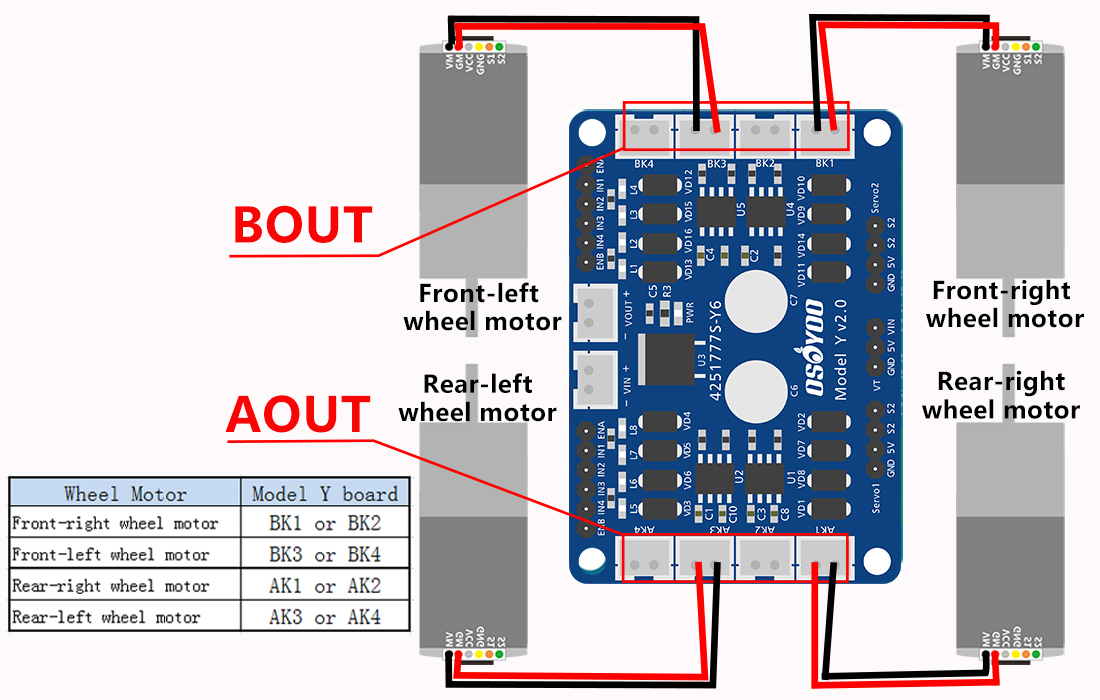
Étape 13. Connectez 4 moteurs à la carte pilote du modèle Y selon les images suivantes.
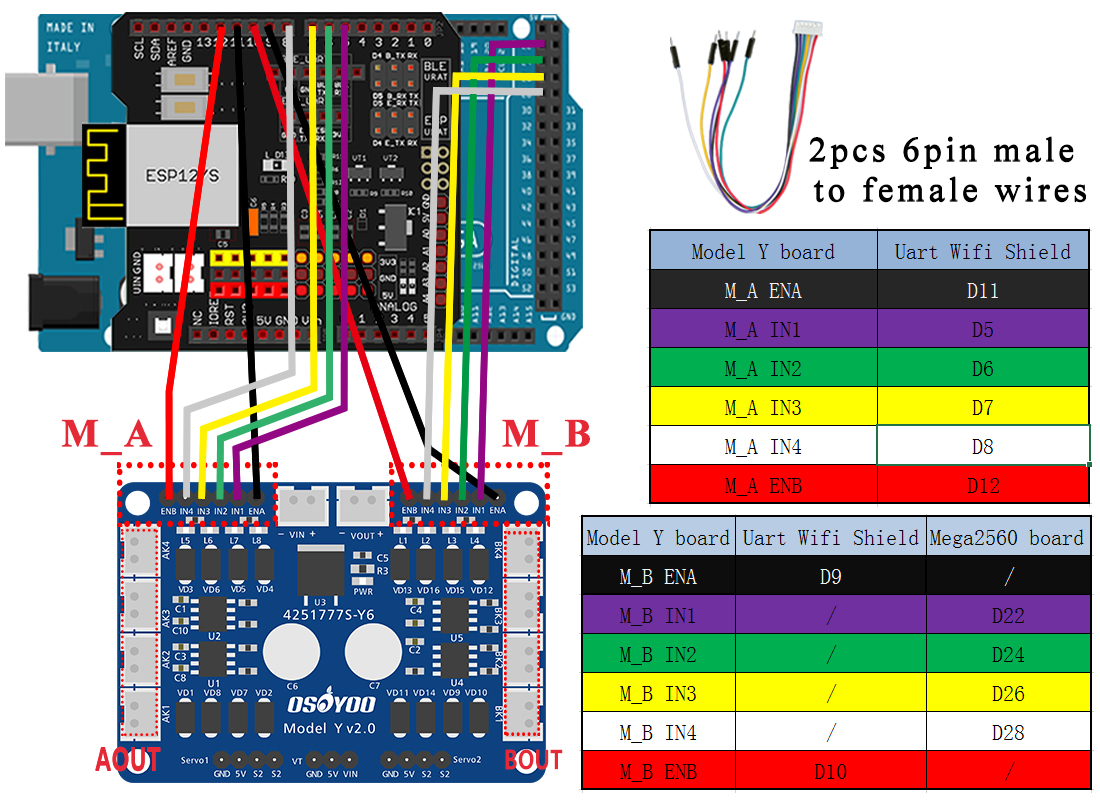
Étape 14.
La carte modèle Y M_A IN1, IN2, IN3, IN4 se connecte à D5, D6, D7, D8.
La carte modèle Y M_B IN1, IN2, IN3, IN4 se connecte à D22, D24, D26, D28.
M_A ENA, la broche ENB se connecte à D11, D12.
M_B ENA, la broche ENB se connecte à D9, D10.
Avertir:
Lorsque vous insérez/retirez la fiche du câble parallèle à 6 broches dans la prise mâle à 6 broches du modèle Y, veuillez tenir le support à broches en plastique blanc pour effectuer l’opération. Ne tirez jamais sur les fils pour retirer la fiche de la prise, sinon cela endommagerait les fils.
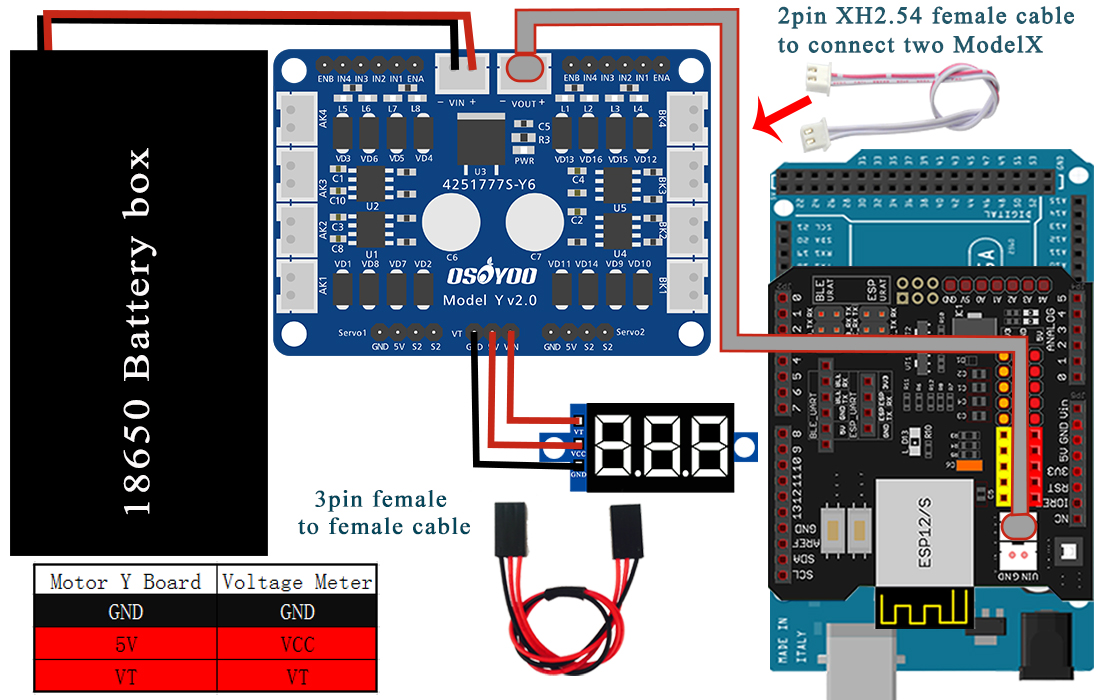
Étape 15.
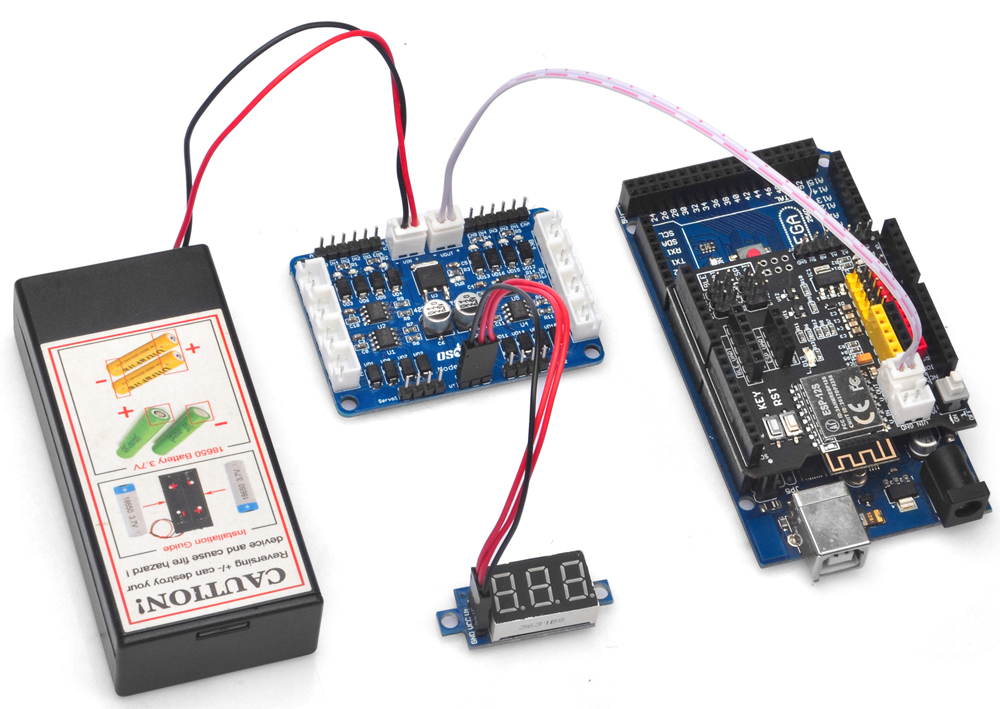
Connectez le voltmètre à la carte de pilote de moteur modèle Y avec un câble femelle à femelle à 3 broches comme sur l’image suivante.
Connectez la carte de pilote de moteur modèle Y au bouclier wifi avec un câble femelle XH2.54 à 2 broches.
Connectez le boîtier de batterie 18650 à la carte de pilote de moteur modèle Y comme sur l’image suivante.
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous disposez d’une version de l’IDE Arduino postérieure à la version 1.1.16, veuillez ignorer cette étape). Téléchargez Arduino IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en, puis installez le logiciel.
Étape 2 : Télécharger https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson1.zip,, décompressez le fichier zip de téléchargement appelé lesson1-reverse.zip, vous verrez un dossier appelé lesson1-reverse.
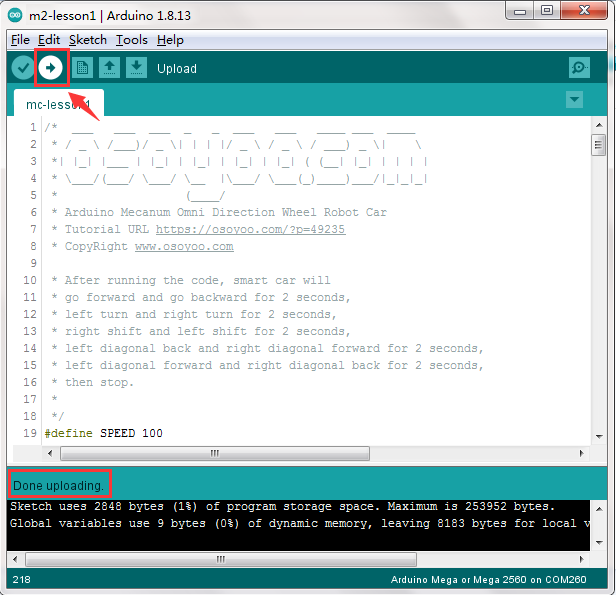
Étape 3 : Connectez la carte Mega2560 au PC avec un câble USB, ouvrez Arduino IDE -> cliquez sur fichier -> cliquez sur Ouvrir -> choisissez le code “lesson1.ino” dans le dossier lesson1, chargez le code dans arduino.
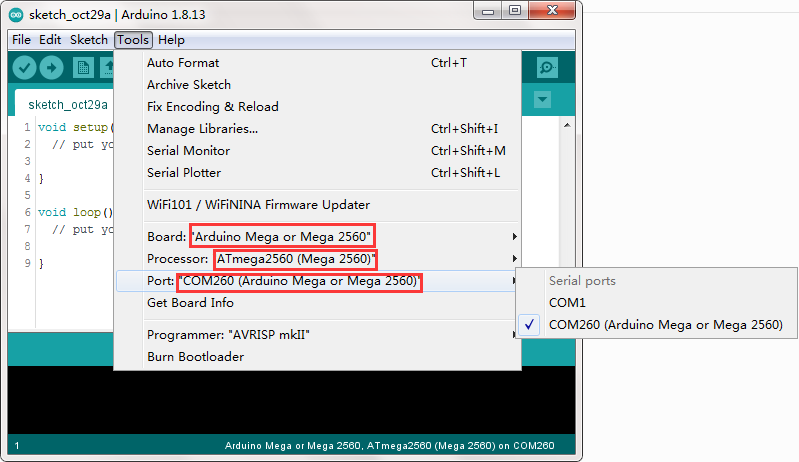
Étape 4 : choisissez la carte/port correspondant à votre projet, téléchargez le croquis sur la carte.
Déconnectez Arduino du PC, placez la batterie dans le boîtier de la batterie. Lorsque vous mettez la voiture au sol, allumez l’interrupteur sur le bouclier OSOYOO Uart WIFI et l’interrupteur sur le boîtier de la batterie.
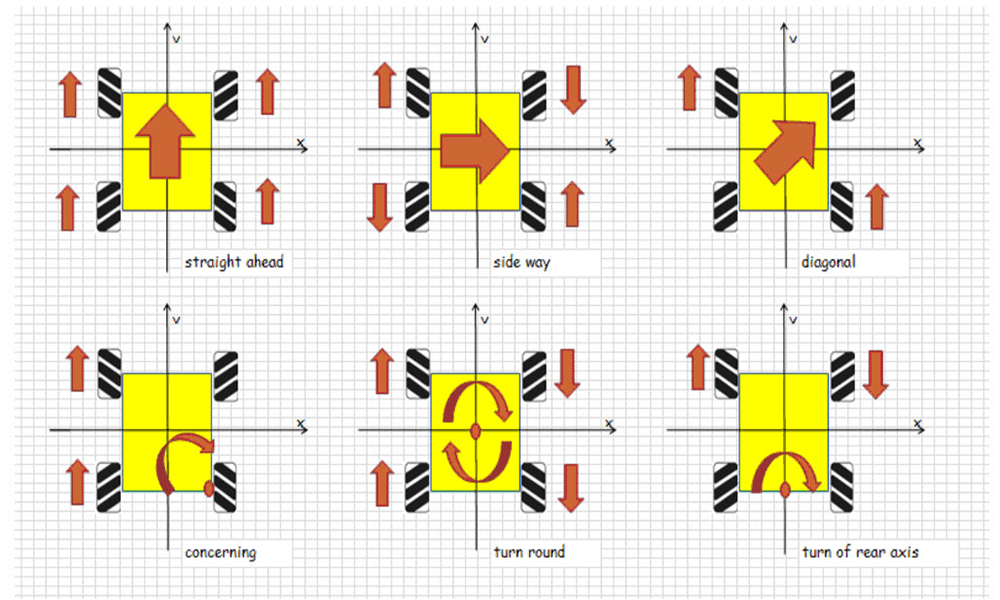
Après avoir exécuté le code de la leçon 1, la voiture se déplacera
Avant → Arrière → Tourner à gauche → Tourner à droite →
Décalage parallèle droit → Décalage parallèle gauche →
Diagonale vers le haut à droite → Diagonale vers le bas à gauche →
Diagonale vers le haut à gauche → Diagonale vers le bas à droite
Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.

















Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.