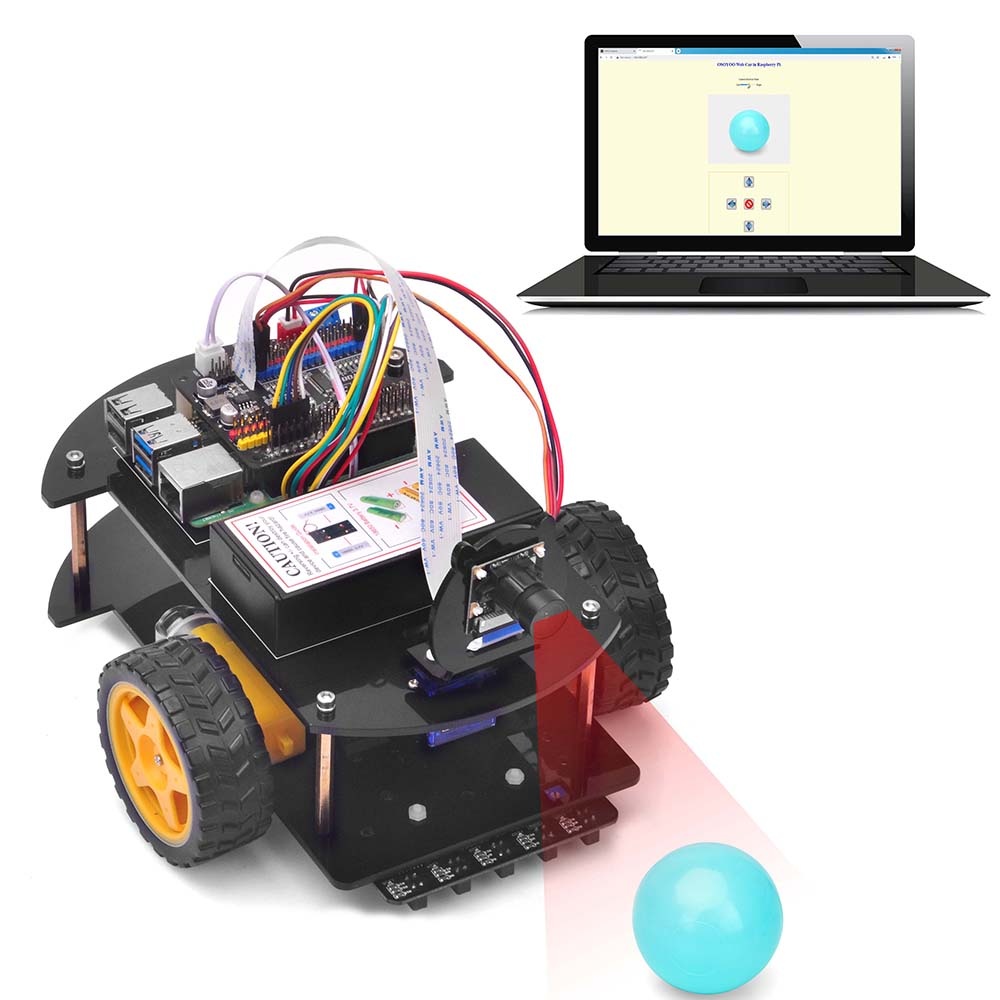
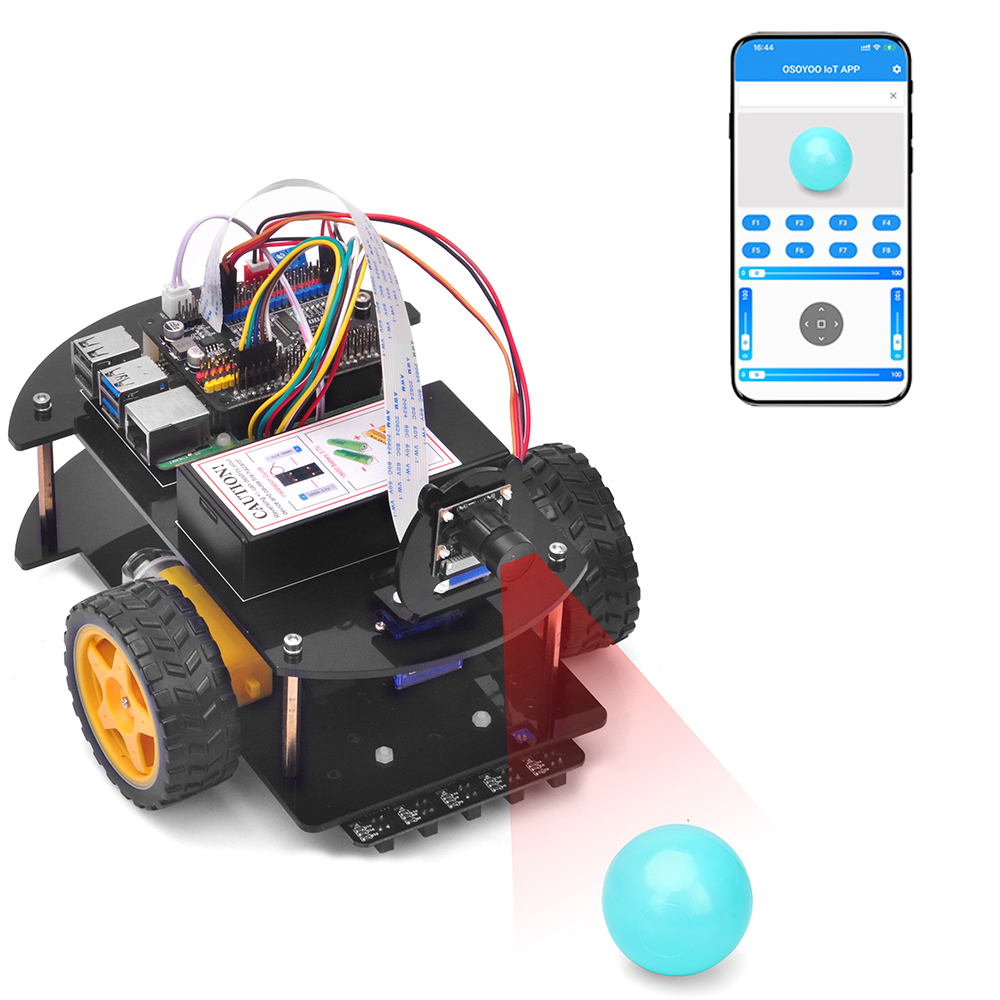
Dans cette leçon, nous allons vous montrer comment utiliser les logiciels Python3 Flask et M-Jpeg Streamer pour contrôler une voiture robot Raspberry Pi via Internet. Vous surveillerez le mouvement en temps réel de la voiture à travers son œil (caméra frontale).
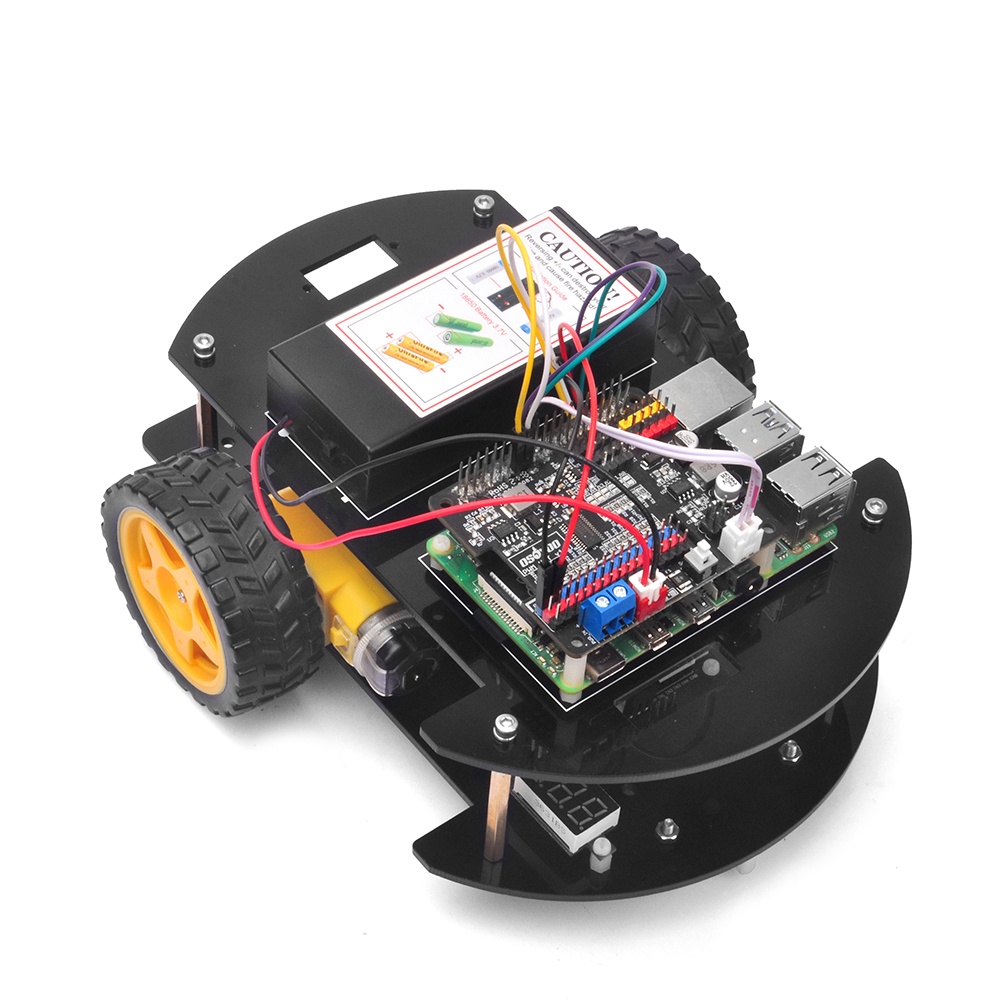
Étape 1 : Vous devez suivre l’infrastructure de base de la leçon 1. Si vous avez déjà terminé la leçon 3, veuillez retirer le support de montage du capteur à ultrasons du servomoteur et les fils du capteur à ultrasons, puis continuez avec cette leçon
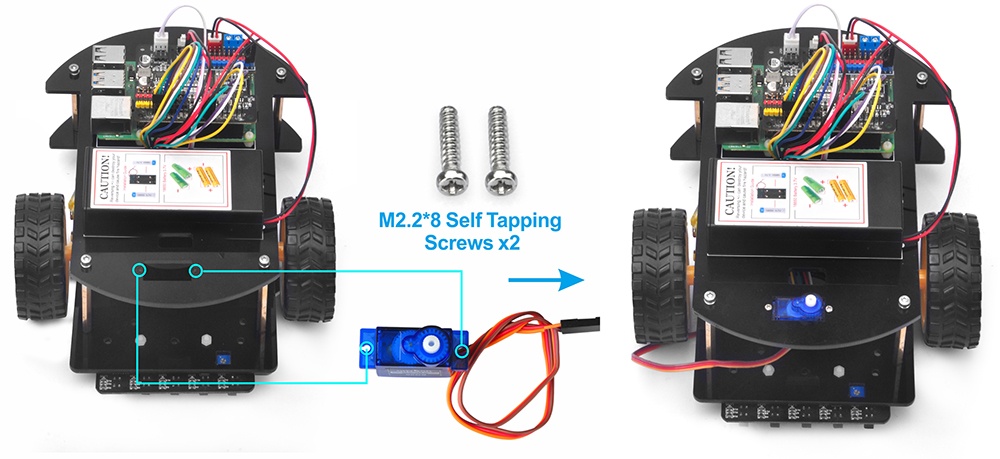
Étape 2: Installez le servomoteur à l’avant du châssis supérieur de la voiture avec 2pcs M2.2 * 8 Auto-taraudage Vis
Étape 3: Choisissez un support fendu dans le servomoteur pour croiser le support de caméra de haut en bas et fixer la lame avec des vis autotaraudeuses M1.5 * 6
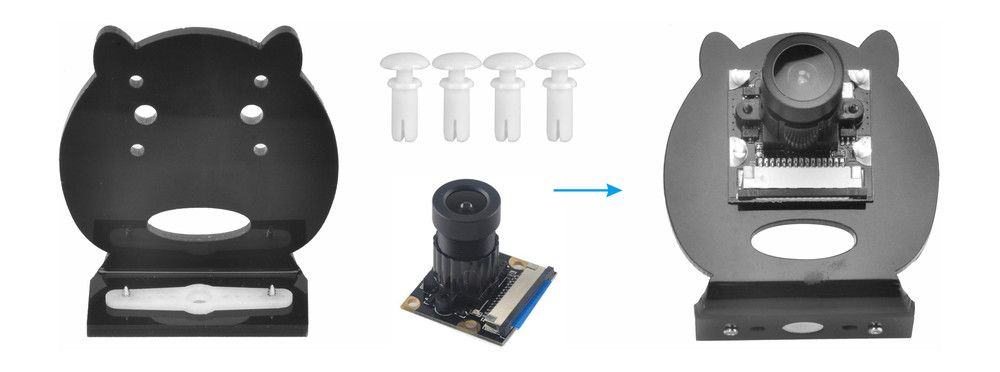
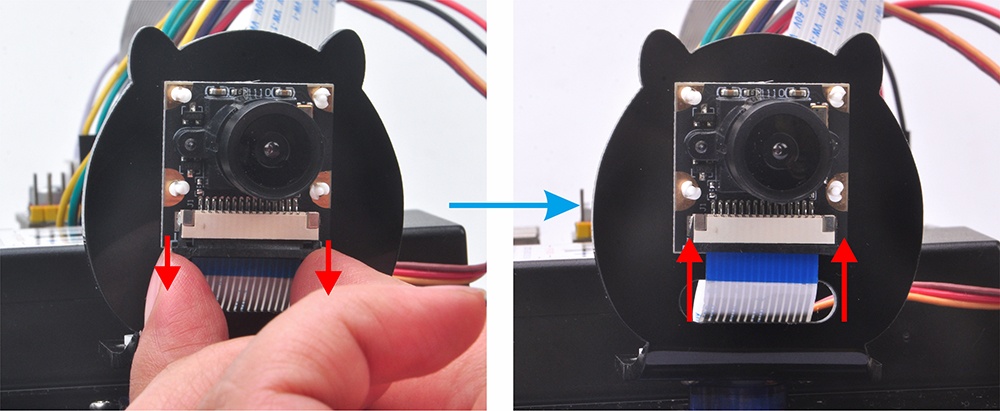
Étape 4: Installez la caméra CSI sur le support avec les rivets à goupille 4pcs M2
Étape 5: Installez le support de caméra sur le servomoteur avec 1pc M2 * 4 auto-taraudage vis
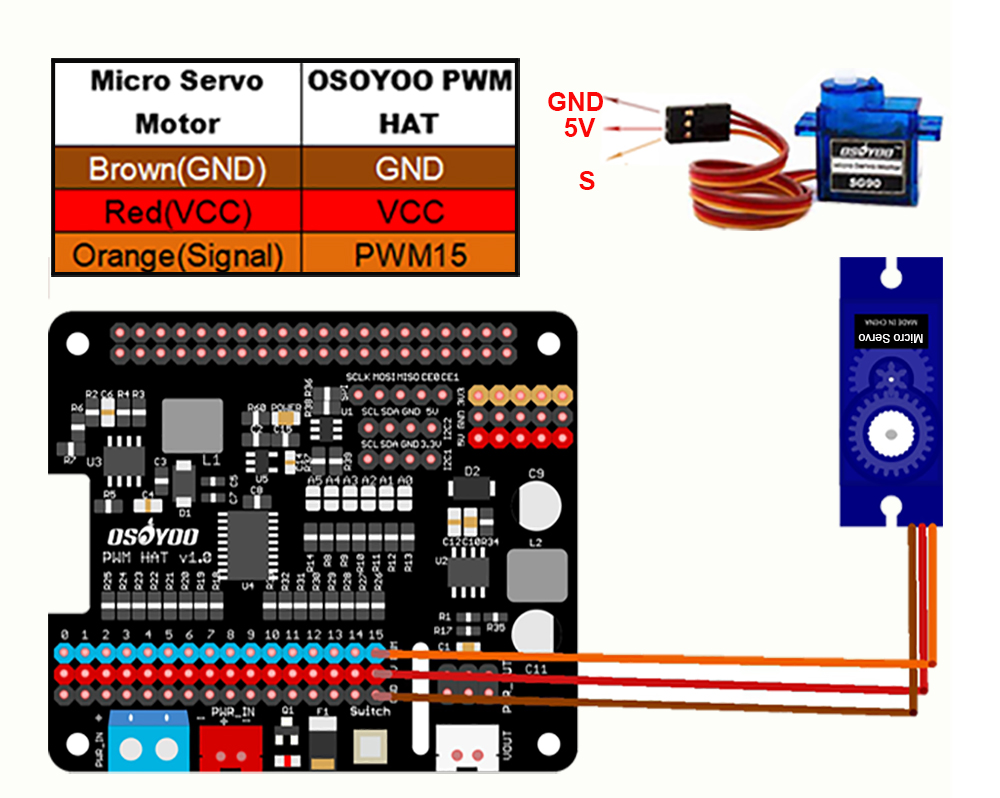
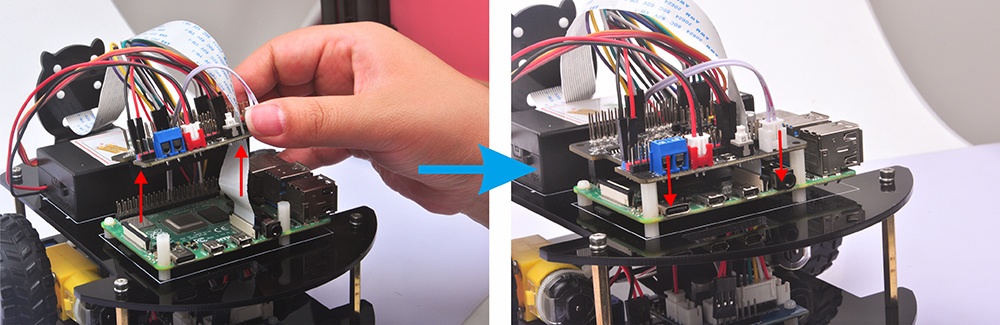
Étape 1) Servomoteur doit être installé et connecté Port PWM 15
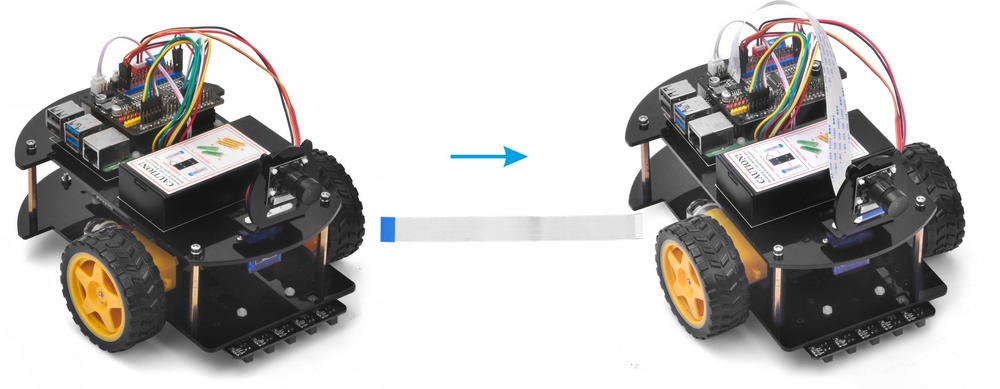
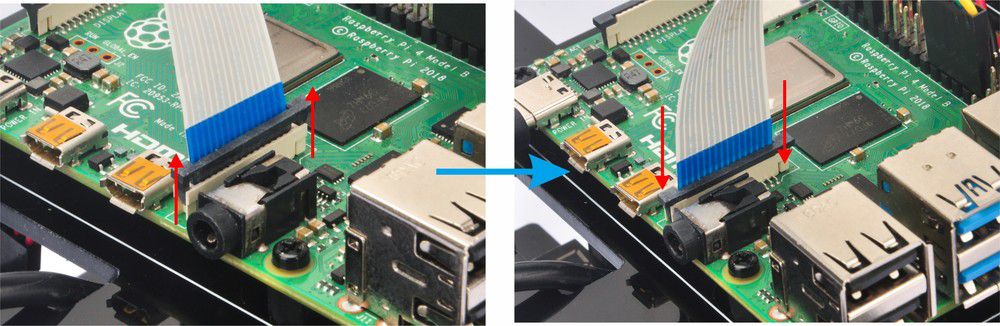
Étape 2) Connectez la caméra CSI à la fente CSI du Raspberry Pi avec le câble ruban CSI (Veuillez faire attention aux connexions du câble avant de l’installer.)
Étape 1 : Assurez-vous d’avoir installé rpi.gpio, la bibliothèque adafruit-pca9685 et activez I2C dans la leçon 1 et allumez la voiture robotisée.
Étape 2 : Veuillez activer l’appareil photo dans Raspberry Pi en tapant la commande suivante (Remarque : si vous gravez BOOKWORM et Trixie OS, vous n’avez pas besoin d’activer la caméra.)
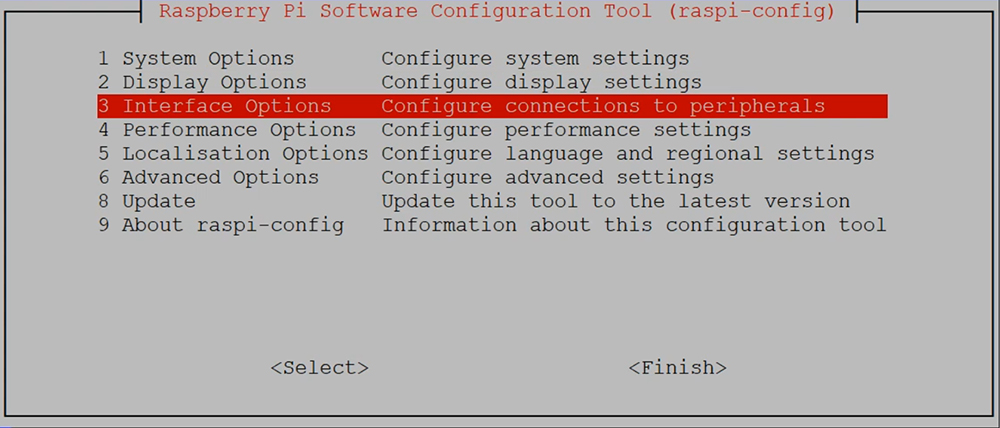
sudo raspi-config
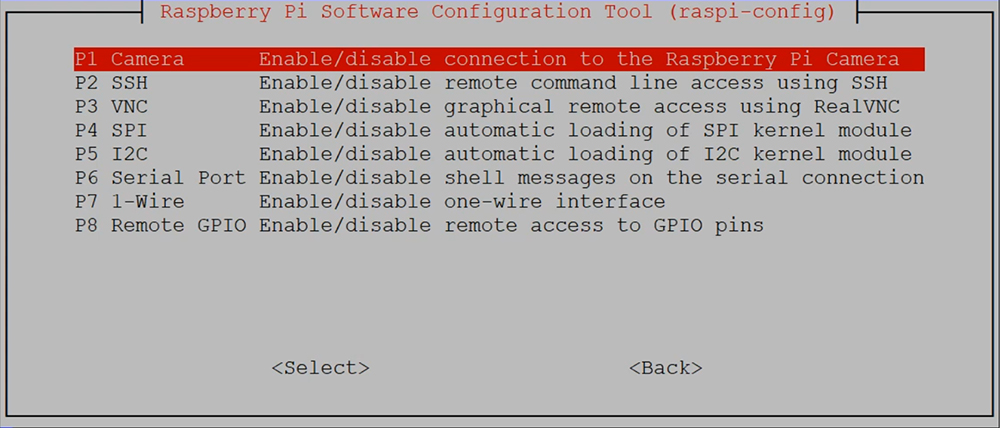
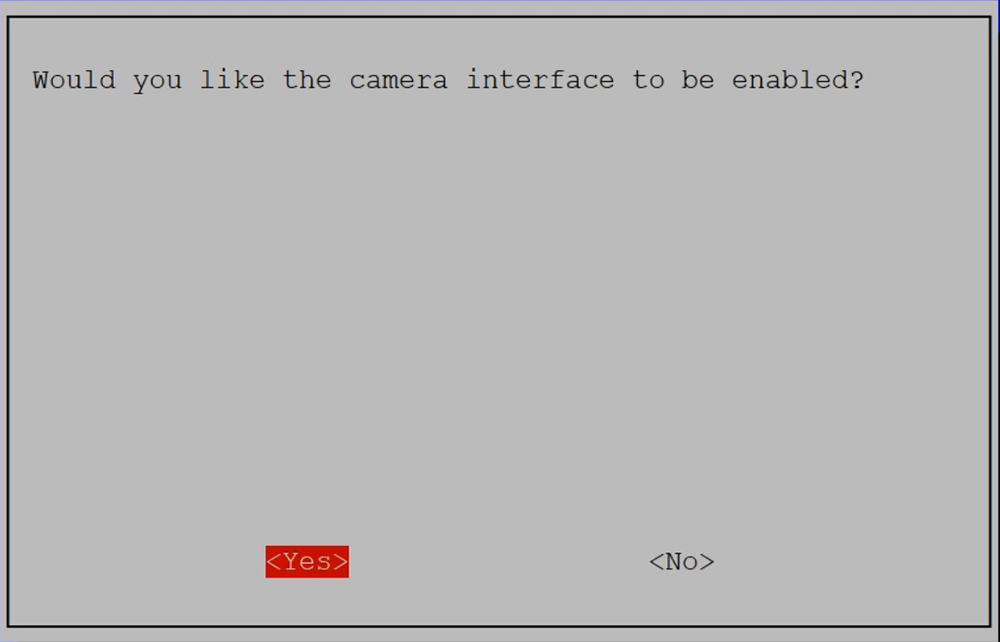
Dans ce cas select → Interfacing Options→ Camera→ Yes→ Ok→ Finish (Veuillez redémarrer le Raspberry Pi conformément à l’avis.)
Étape 3 : Tapez la commande suivante pour installer le logiciel mjpeg-streamer :
wget https://osoyoo.com/driver/picar/camera.sh
Étape 4 : Installez le logiciel Osoyoo Camera Stream. Il s’agit d’une tâche d’installation unique. Vous n’avez besoin d’installer le logiciel qu’une seule fois en saisissant la commande suivante :
bash camera.sh
Après avoir exécuté les commandes ci-dessus, le logiciel mjpeg-streamer est installé dans votre Raspberry Pi. C’est si simple!
REMARQUE : le logiciel Camera Stream et bash camera.sh ne doivent être installés et exécutés qu’UNE SEULE FOIS ! Ainsi, si vous souhaitez utiliser Camera Stream à l’avenir, il vous suffira de suivre l’étape suivante (ÉTAPE 5) et d’exécuter le fichier python startcam.py.
Étape 5 : Démarrer Une fois le serveur de caméra installé, vous pouvez le démarrer en exécutant la commande suivante dans le terminal de votre Pi :
python startcam.py
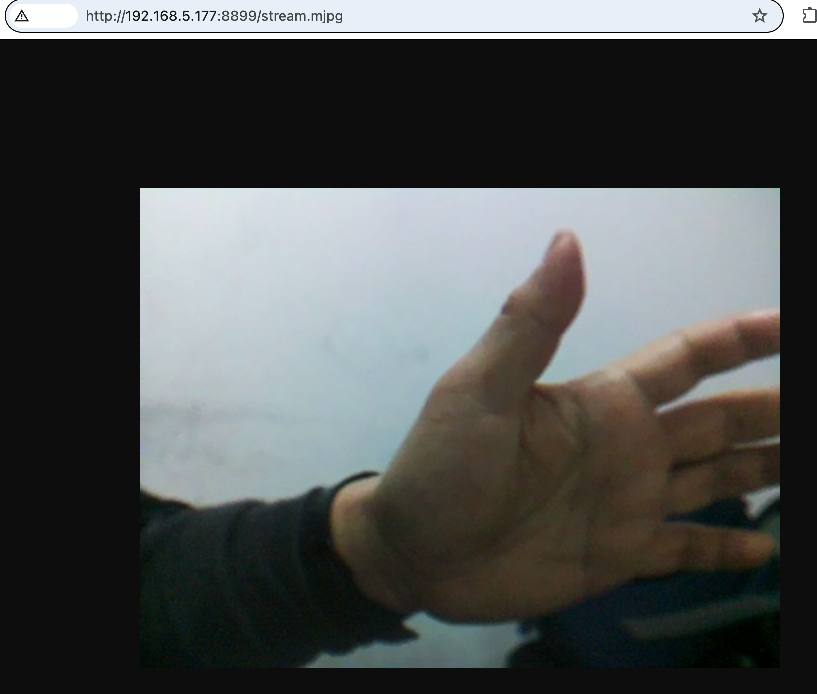
Étape 7 : Vous pouvez désormais utiliser votre navigateur pour tester la vidéo de surveillance. Rendez-vous sur http://your_raspberry_pi_ip:8899/stream.mjpg (dans mon cas, http://192.168.68.227:8899/stream.mjpg) pour voir la vidéo de surveillance.
MÉTHODE 1: UTILISER LE NAVIGATEUR POUR CONTRÔLER UNE VOITURE ROBOT RASPBERRY PI VIA INTERNET
Étape 1 : Ouvrez une nouvelle fenêtre de terminal et exécutez le code suivant pour installer le logiciel OSOYOO de voiture robot contrôlé par caméra Web
wget https://osoyoo.com/driver/picar/picar4.sh
Étape 2: tapez la commande suivante:
bash picar4.sh
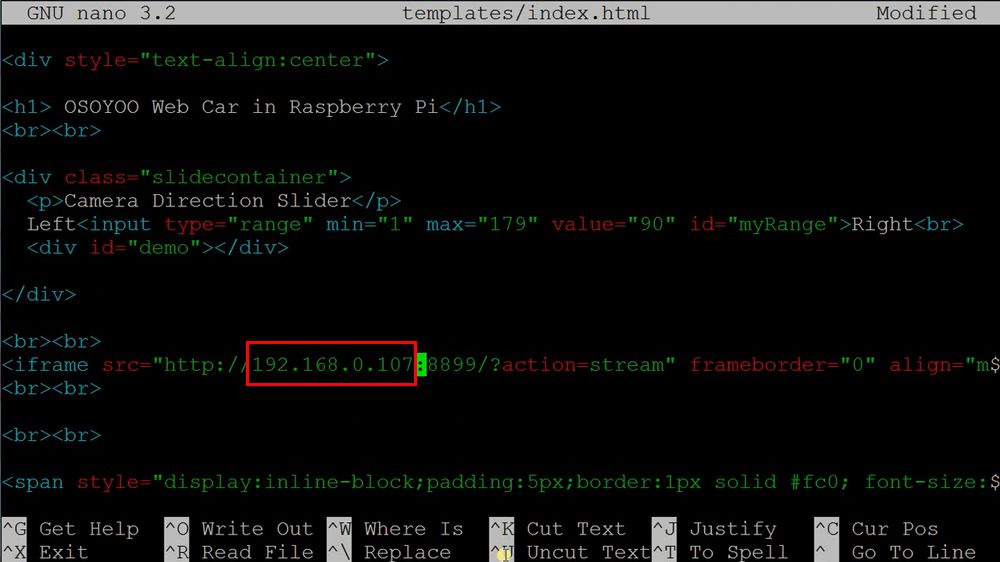
Étape 3 : Tapez ensuite la commande suivante pour modifier le fichier templates/index.html
nano ~/piwebcar/templates/index.html
Étape 4: Veuillez remplacer 10.0.0.23 par l’adresse IP de votre Pi, puis cliquez sur « Ctrl » + « X », puis sur « Y » pour enregistrer le fichier, puis cliquez sur « Entrée » pour quitter le fichier.
Étape 8: mettez la voiture au sol et exécutez le code en tapant la commande suivante :
sudo python ~/piwebcar/webcar.py
Étape 9: Dans votre PC ou téléphone portable qui est le même réseau Wi-Fi que votre Raspberry Pi, ouvrez le navigateur et visitez http://your_RaspberryPi_ip_address.
Les boutons fléchés sont des touches de contrôle de direction, le bouton cercle rouge au milieu est la touche STOP. Il y a quatre boutons de contrôle de vitesse en bas:
La touche 0 signifie la vitesse la plus lente
— clé signifie la 2ème vitesse lente
== clé signifie vitesse normale
La touche ++ signifie la vitesse la plus rapide
En haut de la page, il y a un curseur de direction de la caméra, vous pouvez déplacer le curseur afin de faire pivoter le servo et de changer l’orientation de la caméra.
MÉTHODE 2: UTILISER APP POUR CONTRÔLER UNE VOITURE ROBOT RASPBERRY PI VIA INTERNET
Étape 1 : Ouvrez une nouvelle fenêtre de terminal et exécutez le code suivant pour télécharger l’exemple de code pour le contrôle APP
Étape 2 : Tapez la commande suivante pour exécuter l’exemple de code:
python picar-udp-control4.py
Étape 3) Télécharger OSOYOO IoT UDP Robot Car control APP Dans Google Play ou Apple Store, veuillez rechercher les mots-clés « OSOYOO IoT UDP Robot APP», vous trouverez une icône rouge APP comme suit (Note : Si vous ne trouvez pas cette APP dans Google Play, vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/driver/udp-app.apk):
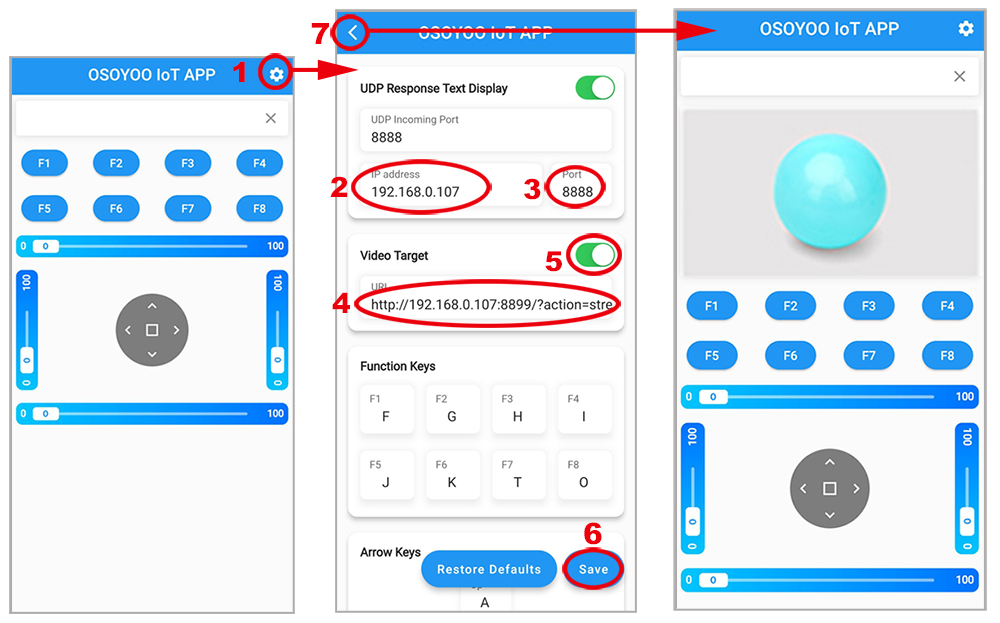
Étape 4) Connectez votre téléphone au même routeur Wi-Fi SSID que celui utilisé par le Raspberry Pi. Ouvrez l’APP, cliquez sur “setting icon(1)” pour entrer dans “setting UI”, entrez l’adresse IP de votre Raspberry Pi et [Port] à 8888, entrez [http://your_raspberry_pi_ip:8899/?action=stream] à Video Target, puis tournez [Video Target switch] en vert, puis cliquez sur [save], puis cliquez sur “back icon(7)” pour revenir à l’UI de contrôle comme suit :
Étape 5) Maintenant, mettez la voiture sur le sol, et vous pouvez cliquer sur les touches de direction < > ^ v pour faire bouger la voiture. Utilisation || touche pause pour arrêter le mouvement de la voiture.
Le curseur en haut des touches de direction est un curseur de direction de la caméra, et vous pouvez déplacer le curseur afin de faire pivoter le servo et de modifier l’orientation de la caméra.
Le curseur à gauche des touches de direction est un curseur de vitesse, et vous pouvez déplacer le curseur vers le haut pour accélérer ce robot.
Remarque : F1~F8, ainsi que les curseurs inférieur et droit ne sont pas disponibles dans cette leçon.