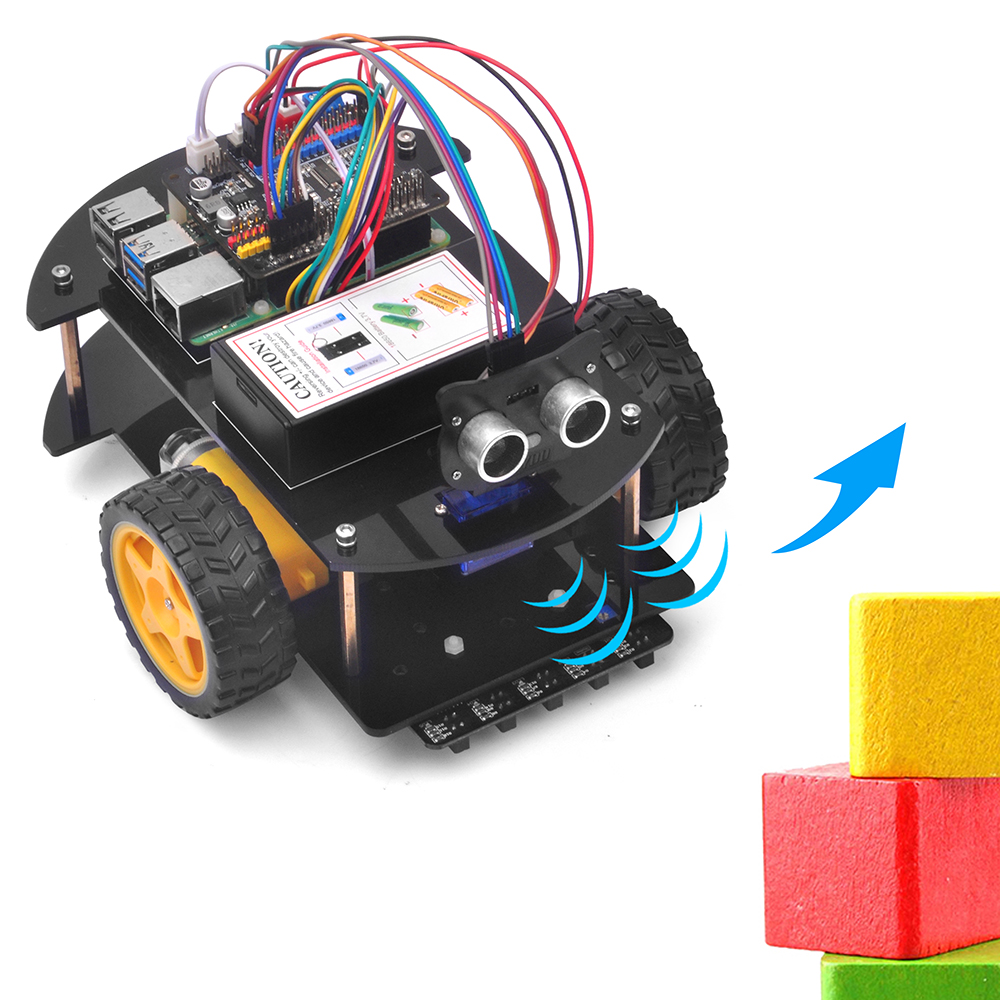
Dans cette leçon, notre voiture robot Raspberry Pi utilisera un capteur à ultrasons pour détecter les obstacles et rendre la conduite automatique et éviter les collisions.
Les exemples de codes de ce didacticiel sont écrits en Python.
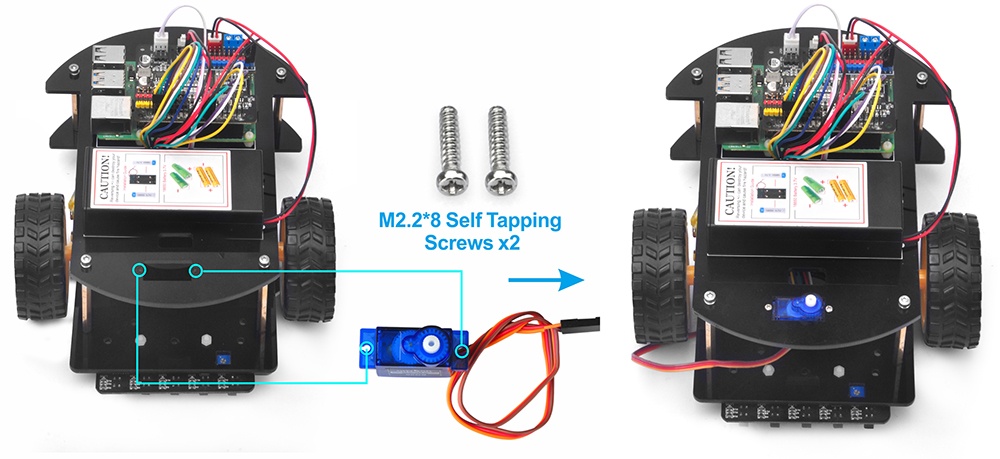
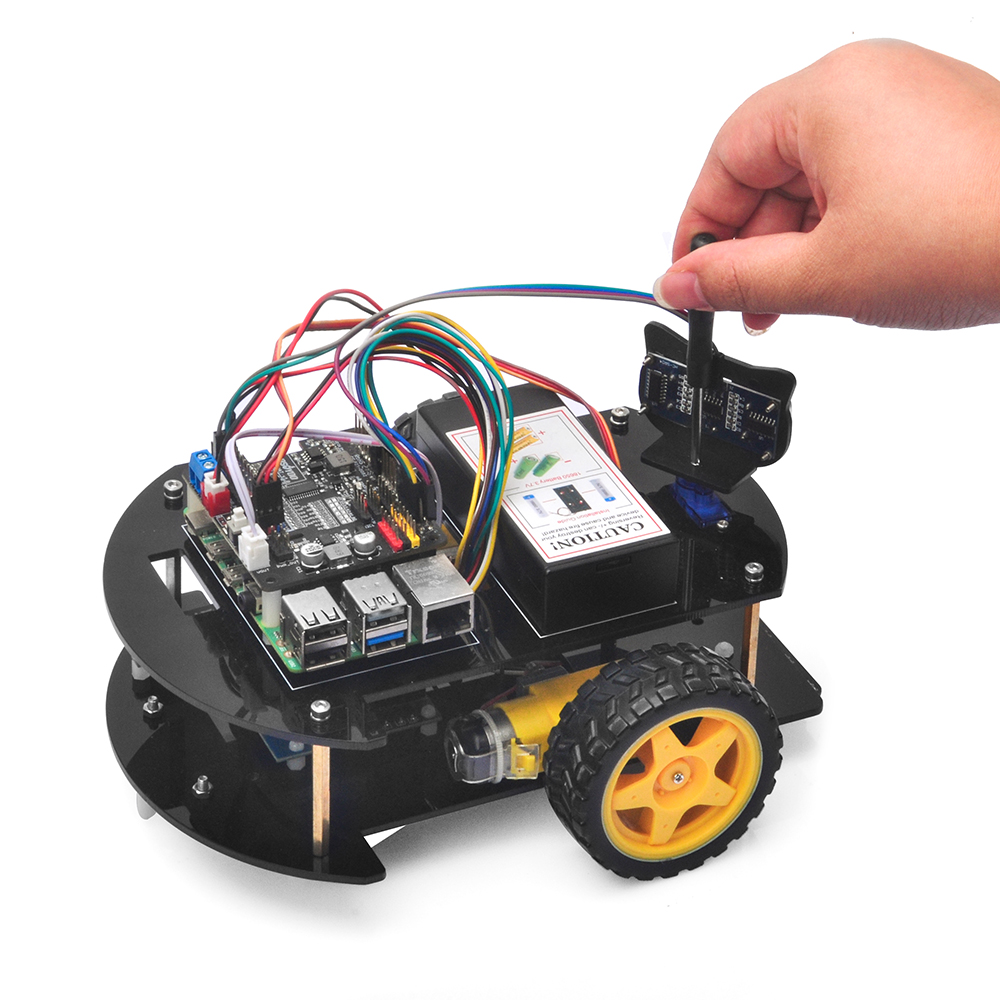
Étape 2 : Installez un servomoteur à l’avant du châssis supérieur de la voiture avec 2pcs M2.2 * 8 autotaraudeurs
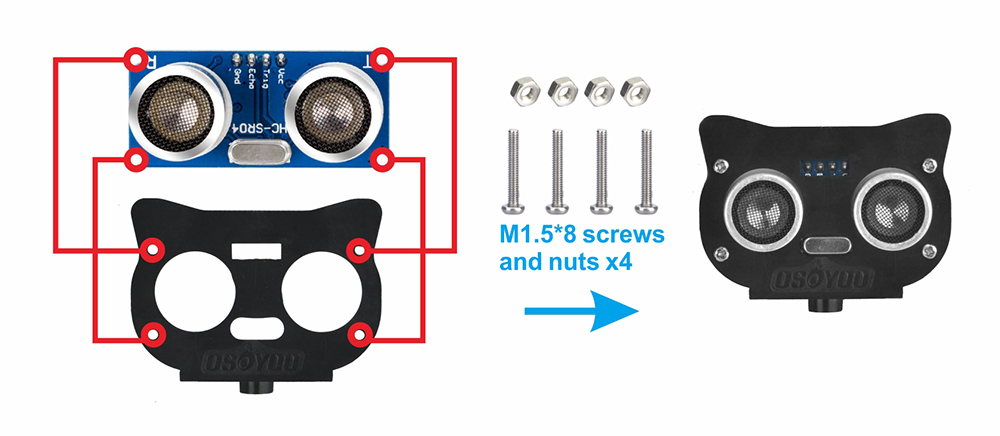
Étape 3 : Installez le module à ultrasons pour monter le support avec la vis 4pcs M1.5 * 8 et les écrous M1.5
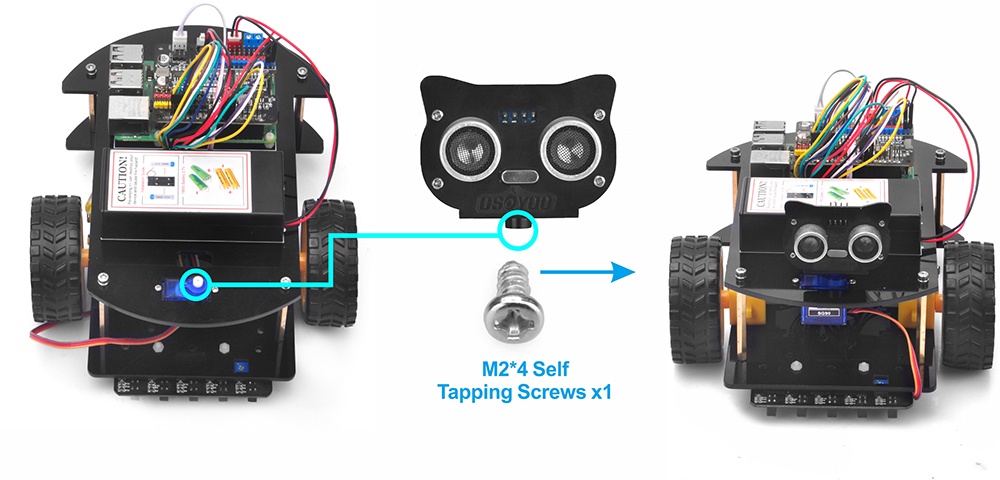
Étape 4 : Installez le support de montage pour module à ultrasons sur le servomoteur avec vis autotaraudée M2 * 4
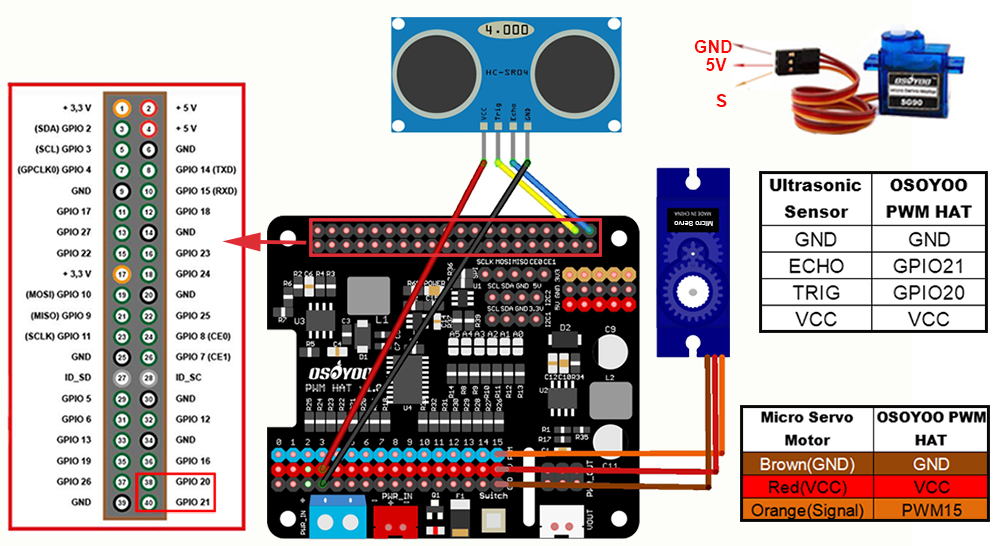
Connectez le servomoteur SG90 au PWM 15 , et connectez GND et VCC du module à ultrasons à GND et V +, puis connectez TRIG et ECHO du module à ultrasons à GPIO20 et GPIO21 comme graphique suivant (rappelez-vous: NE retirez PAS les fils existants installés dans la leçon 1):
Étape 1: Assurez-vous d’avoir installé rpi.gpio, la bibliothèque adafruit-pca9685 et activez I2C dans la leçon 1.
Étape 2: Allumez la voiture robot et téléchargez le code python en tapant la commande suivante dans votre terminal Raspberry Pi:
Étape 3: Mettez la voiture robot sur le sol et exécutez le programme :
python picar-obstacle-avoid4.py
Étape 4: Après avoir exécuté la dernière commande, le servomoteur fera face au capteur à ultrasons à gauche, puis à droite, puis au milieu et restera pendant quelques secondes. Si le capteur à ultrasons n’est pas orienté vers l’avant, veuillez éteindre immédiatement la voiture robotisée. Ensuite, retirez le capteur à ultrasons du servo et réinstallez-le, assurez-vous qu’il fait face à l’avant et fixez-le avec une vis M2 * 4.
Étape 5: Rallumez la voiture, tapez la même commande python picar-obstacle-avoid.py et exécutez à nouveau le programme. Maintenant, la voiture rendra automatiquement la conduite automatique d’évitement d’obstacles.