In questo tutorial, useremo il sensore di tracciamento a 5 linee per guidare OSOYOO Sport Car per Arduino a muoversi automaticamente lungo la linea di binario nera nel terreno bianco. Il software in questa lezione leggerà i dati dai sensori di tracciamento e guiderà automaticamente l’auto a muoversi lungo la linea nera del binario nel terreno bianco.
Il sensore IR Tracker a 5 canali OSOYOO è una serie di 5 sensori IR configurati e letti come bit digitali! Può adattarsi a molti ambienti complessi, gli utenti possono regolare il potenziometro di sensibilità a bordo in base alla situazione reale per modificare la soglia di trigger, che rileva i cambiamenti nell’angolo della traccia della curva. A bordo, una sonda di tracciamento a infrarossi a 5 canali può rilevare simultaneamente la linea di binario centrale e rilevare i bordi sinistro e destro. Possiamo installarlo sulla Smart car con viti e rame o rivetti per completare il tracciamento ad alta precisione.
Per ulteriori informazioni sul sensore, fare riferimento a questo link:
Passo 1: Scarica la libreria PWMServo da https://osoyoo.com/driver/sg90car/PWMServo.zip, quindi importa la libreria nell’IDE Arduino. Se hai completato la lezione 2, salta questo passaggio.
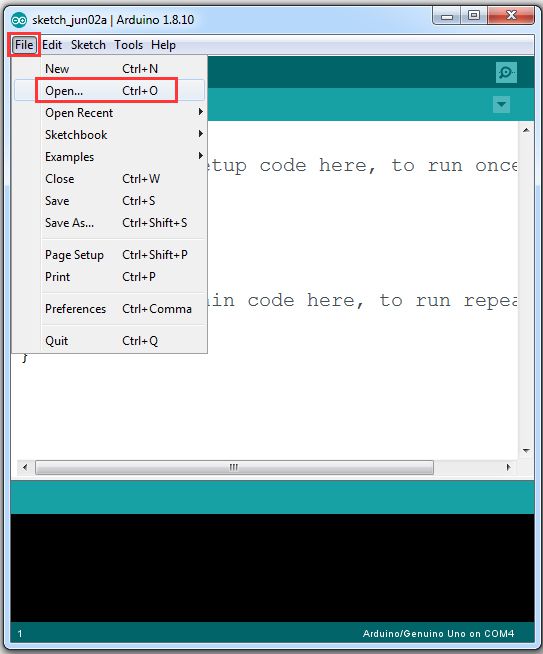
Passaggio 2: Scarica il codice di esempio della lezione 3, decomprimi il file zip di download sg90car-lesson3.zip, vedrai una cartella chiamata sg90car-lesson3. Passo 3: Collegare la scheda UNO R3 al PC con cavo USB, aprire Arduino IDE → fare clic su file → fare clic su Open → scegliere il codice “sg90car-lesson3.ino” nella cartella sg90car-lesson3, caricare il codice nella scheda base OSOYOO per Arduino. Avviso: spegnere la batteria o scollegare l’alimentatore quando si carica il codice sketch sulla scheda base OSOYOO per Arduino.
Passaggio 4: Modificare il valore predefinito 90 nella riga 22 con il valore FRONT nella lezione 1. Se si allinea manualmente la direzione della ruota come opzione 1 nel passaggio 5 della lezione1, saltare questo passaggio.
#define FRONT 90 // steering to front
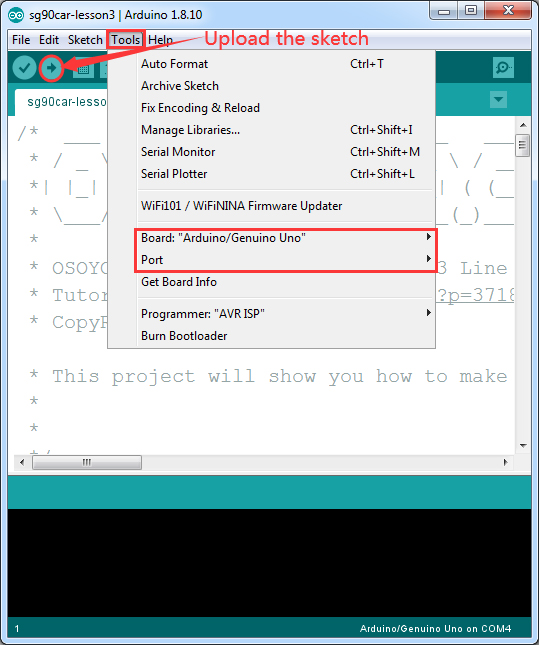
Passaggio 5: Scegli la scheda / porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
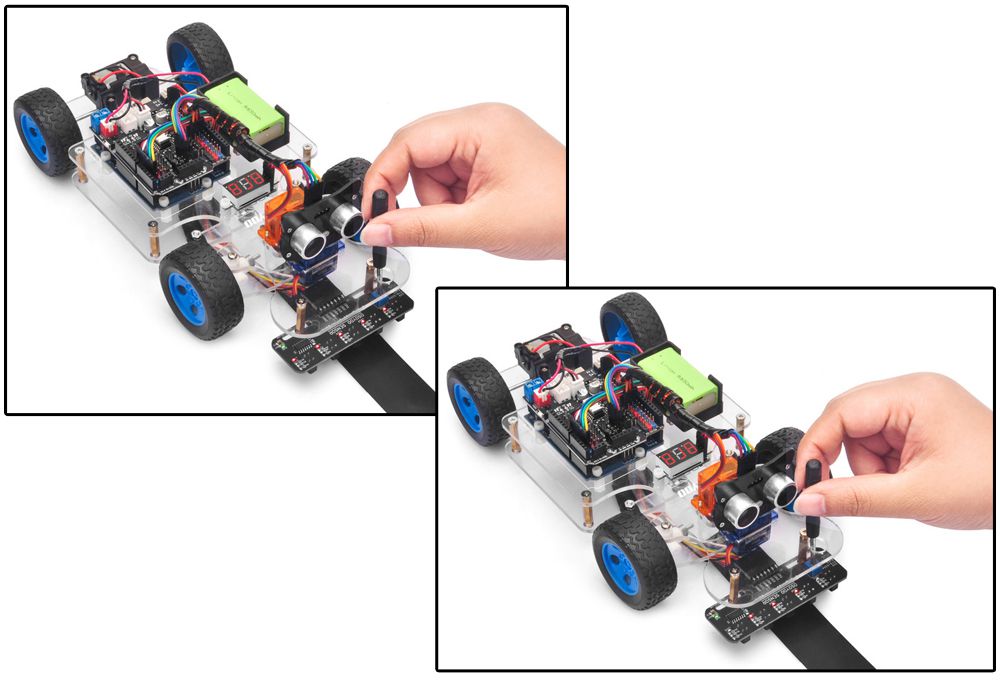
Passaggio 6: Regolare la sensibilità dei moduli sensore di tracciamento.
Accendere e tenere premuta l’auto e regolare il potenziometro sul sensore di tracciamento con cacciavite a croce fino a ottenere il miglior stato di sensibilità: il segnale indica che la luce LED si spegnerà quando il sensore è sopra il suolo bianco e il LED del segnale si accenderà quando il sensore è sopra la pista nera
Collaudo finale
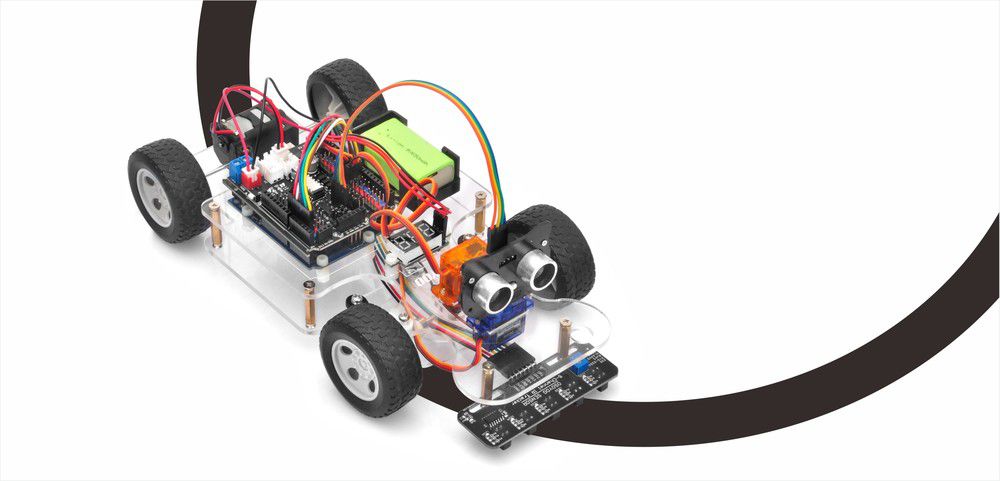
1. Preparare una traccia nera (la larghezza della traccia nera è superiore a 20 mm e inferiore a 30 mm) in fondo bianco. Si prega di notare che l’angolo di piegatura della pista non può essere superiore a 30 gradi. Se l’angolo è troppo grande, l’auto si sposterà fuori dalla pista.
2. Scollegare la scheda base OSOYOO per Arduino dal PC e confermare che l’interruttore di alimentazione di OSOYOO Motor Shield V1.1 sia spento, quindi inserire una batteria da 9 V nella scatola della batteria. (Nota: assicurarsi che la direzione polare sia corretta, altrimenti può distruggere il dispositivo e causare pericolo di incendio).
3. Metti l’auto in pista, accendi l’interruttore di OSOYOO Motor Shield V1.1, l’auto si muoverà lungo la pista nera. Nota: se l’auto non si muove secondo il risultato sopra menzionato, è necessario controllare la connessione del filo del sensore di tracciamento, la tensione della batteria (deve essere superiore a 7,2 v).
4. Se vuoi cambiare l’angelo di destra o di sinistra, modifica le righe da 23 a 26 del codice e carica nuovamente lo schizzo: (Nota: l’angelo non può essere impostato più di 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Se si desidera modificare la velocità dell’auto, si prega di rivedere il seguente codice dello schizzo (Nota: il valore massimo è 255)