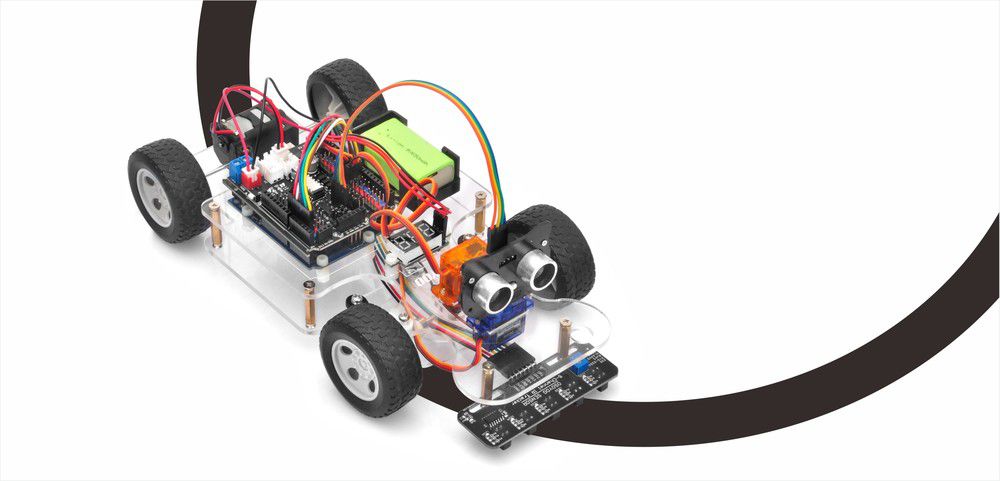
Dans ce tutoriel, nous utiliserons un capteur de suivi à 5 lignes pour guider OSOYOO Sport Car pour Arduino afin de se déplacer automatiquement le long de la ligne de piste noire sur le fond blanc. Le logiciel de cette leçon lira les données des capteurs de suivi et guidera automatiquement la voiture pour qu’elle se déplace le long de la ligne de piste noire sur le fond blanc.
Le capteur de suivi IR à 5 canaux OSOYOO est un ensemble de 5 capteurs IR configurés et lus sous forme de bits numériques ! Il peut s’adapter à de nombreux environnements complexes, les utilisateurs peuvent ajuster le potentiomètre de sensibilité embarqué en fonction de la situation réelle pour modifier le seuil de déclenchement, ce qui détecte les changements dans l’angle de la trajectoire de courbe. À bord, une sonde de suivi infrarouge à 5 canaux peut détecter simultanément la ligne de voie médiane et détecter les bords gauche et droit. Nous pouvons l’installer sur la voiture intelligente avec des vis et du cuivre ou des rivets pour compléter le suivi de haute précision.
Pour plus d’informations sur le capteur, veuillez consulter ce lien :
Étape 1 : Veuillez télécharger la bibliothèque PWMServo à partir de https://osoyoo.com/driver/sg90car/PWMServo.zip, puis importer la bibliothèque dans Arduino IDE. Si vous avez terminé la leçon 2, veuillez ignorer cette étape.
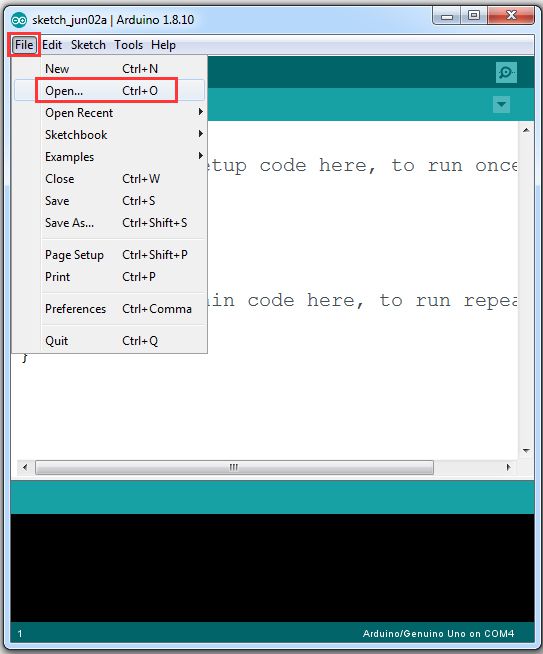
Étape 2 : Téléchargez l’exemple de code de la leçon 3, décompressez le fichier zip de téléchargement sg90car-lesson3.zip, vous verrez un dossier appelé sg90car-lesson3. Étape 3 : Connectez la carte UNO R3 au PC avec un câble USB, ouvrez Arduino IDE → cliquez sur fichier → cliquez sur Ouvrir → choisissez le code « sg90car-lesson3.ino » dans le dossier sg90car-lesson3, chargez le code dans OSOYOO Basic Board for Arduino. Remarque : Coupez votre batterie ou débranchez votre adaptateur secteur lorsque vous téléchargez le code d’esquisse sur OSOYOO Basic Board for Arduino.
Étape 4 : Remplacez la valeur par défaut 90 de la ligne 22 par la valeur FRONT de la leçon 1. Si vous alignez manuellement la direction de la roue comme option 1 de l’étape 5 de la leçon 1, ignorez cette étape.
#define FRONT 90 // steering to front
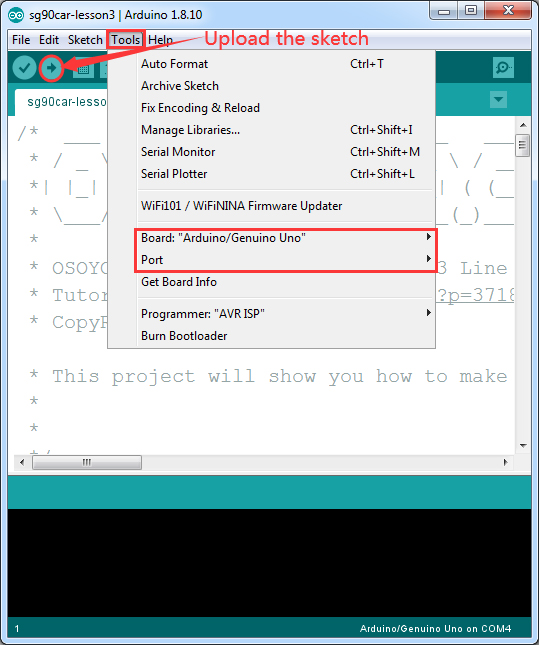
Étape 5 : Choisissez la carte / port correspondant à votre projet, téléchargez l’esquisse sur le tableau.
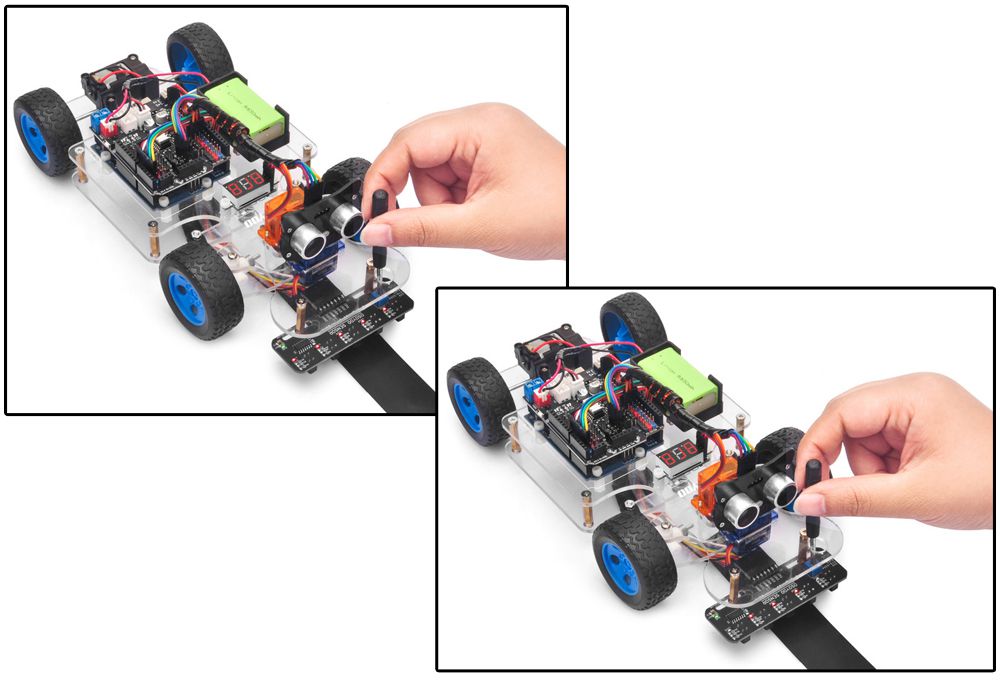
Étape 6 : Ajustez la sensibilité des modules de capteurs de suivi.
Allumez et maintenez la voiture et réglez le potentiomètre sur le capteur de suivi avec un tournevis croisé jusqu’à obtenir le meilleur état de sensibilité : le signal indique que la lumière LED s’éteint lorsque le capteur est au-dessus du sol blanc et la LED du signal s’allume lorsque le capteur est au-dessus d’une piste noire
Essais finaux
1. Préparez une piste noire (la largeur de la piste noire est supérieure à 20 mm et inférieure à 30 mm) sur fond blanc. Veuillez noter que l’angle de courbure de la voie ne peut pas être supérieur à 30 degrés. Si l’angle est trop grand, la voiture sortira de la piste.
2. Déconnectez OSOYOO Basic Board for Arduino du PC et confirmez que l’interrupteur d’alimentation de l’OSOYOO Motor Shield est éteint, puis mettez une batterie 9V dans le boîtier de la batterie. (Remarque : assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie).
3. Mettez la voiture sur la piste, allumez l’interrupteur d’OSOYOO Motor Shield, la voiture se déplacera le long de la piste noire. Remarque : Si la voiture ne bouge pas selon le résultat mentionné ci-dessus, vous devez vérifier votre connexion filaire du capteur de suivi, la tension de la batterie (doit dépasser 7,2 v).
4. Si vous souhaitez changer l’ange de droite ou de gauche, veuillez modifier la ligne 23 à 26 du code et télécharger à nouveau le croquis : (Remarque : l’ange ne peut pas être réglé plus de 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Si vous souhaitez modifier la vitesse de la voiture, veuillez réviser le code suivant du croquis (Remarque : la valeur maximale est 255)