Modello 2021006600
La ruota Mecanum a direzione omni è una ruota molto interessante che consente all’auto robotica di effettuare movimenti omni-direzionali (ad esempio, spostamento parallelo a sinistra e a destra).
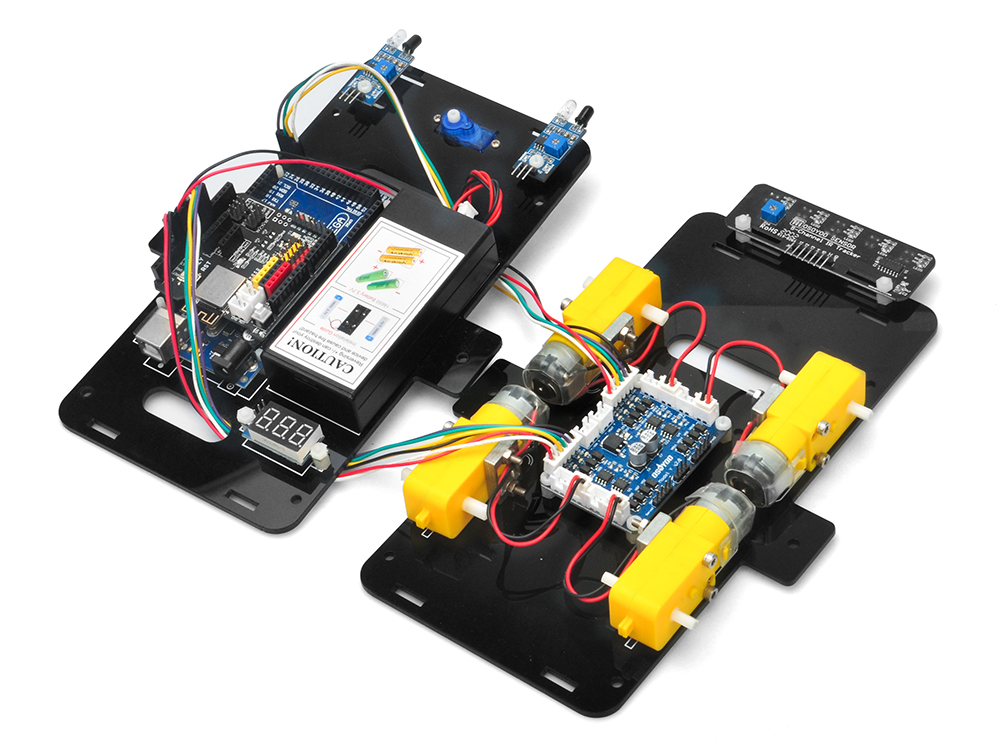
In questo progetto, mostreremo come utilizzare Arduino per controllare un’auto robotica con ruote Mecanum di marca Osoyoo per effettuare alcuni movimenti di base, inclusi andare avanti, indietro, girare a sinistra, girare a destra, spostamento parallelo a sinistra, spostamento parallelo a destra, ecc.
Questa lezione mostra anche come installare il telaio di questa macchina e collegare i fili del segnale di controllo di Arduino alla scheda del modello Y. Questa installazione sarà il punto di partenza delle nostre altre lezioni.
Scarica i tutorial in PDF:https://osoyoo.com/manual/2021006600.pdf
Video di installazione dell’auto robot OSOYOO: https://osoyoo.com/manual/2021006600.html
Cassa del kit robotico a ruote Mecanum OSOYOO x1
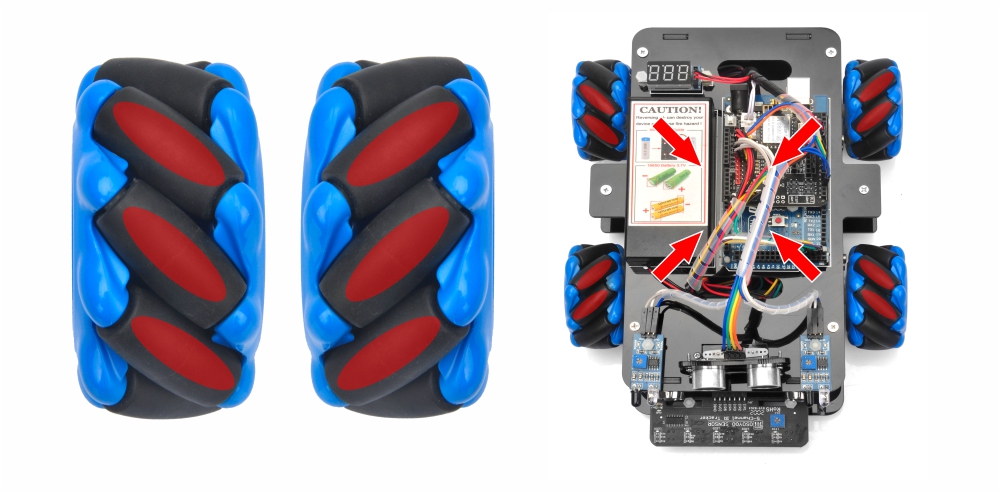
Ruote e motori OSOYOO x4 (ruote sinistre x2 / ruote destre x2)
Scheda OSOYOO Mega2560 completamente compatibile con Arduino UNO/Mega2560 x1
Shield OSOYOO Uart WIFI x1
Scheda driver motori OSOYOO Model Y
(è integrata con due unità di driver a ponte H TB6612 che possono controllare 4 canali separati e 8 porte di output PWM)
Misuratore di tensione OSOYOO x1
Scatola batteria OSOYOO x1
Cavo jumper maschio-femmina OSOYOO a 6 pin x2
Cavo jumper femmina-femmina OSOYOO a 3 pin x1
Adattatore femmina-femmina OSOYOO a 2 pin PnP x1
Batterie 18650 (3,7V) x2
Caricatore di batterie x1
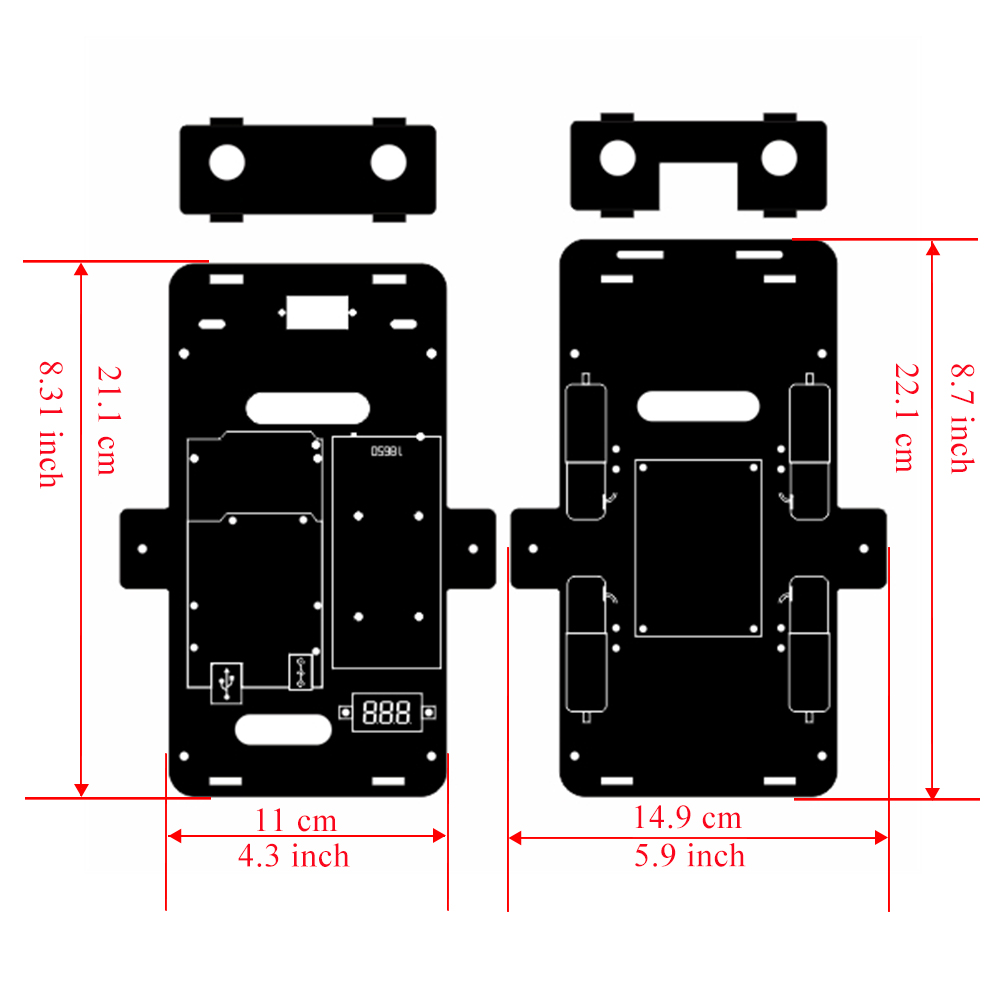
Dimensione
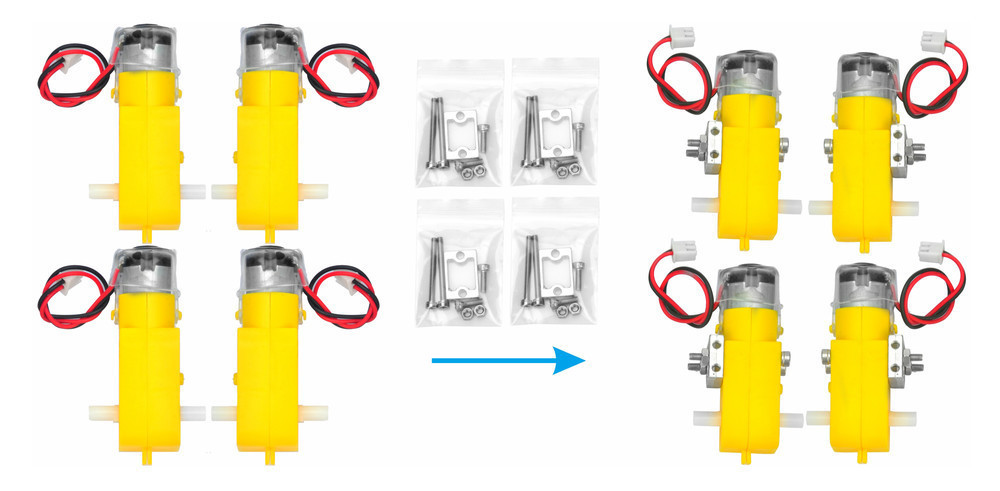
1)Fissa 4 motori con i supporti metallici per motori come segue. (Verifica la direzione del motore prima di installare i supporti metallici per motori.).
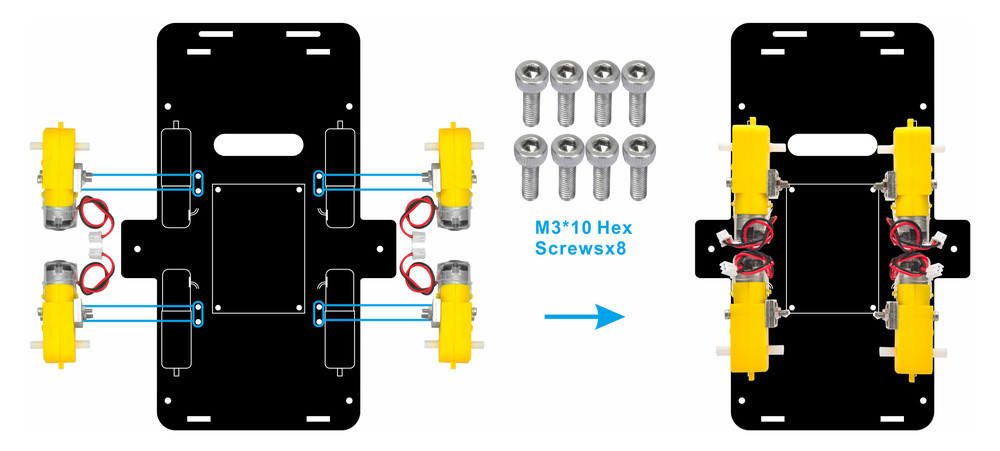
2) Fissa i 4 motori sul telaio inferiore dell’auto con viti esagonali M3*10 utilizzando un cacciavite esagonale. (Le viti per questo passaggio sono incluse nel pacchetto del supporto metallico per motori.)
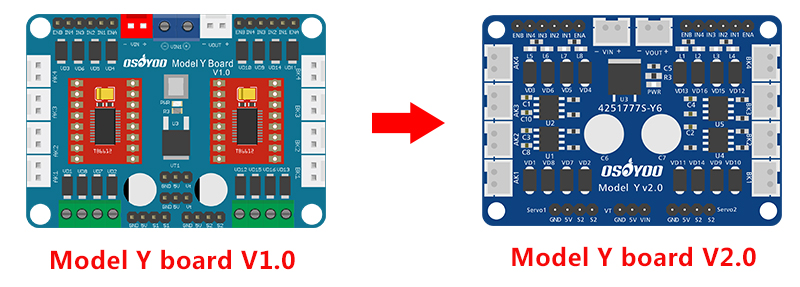
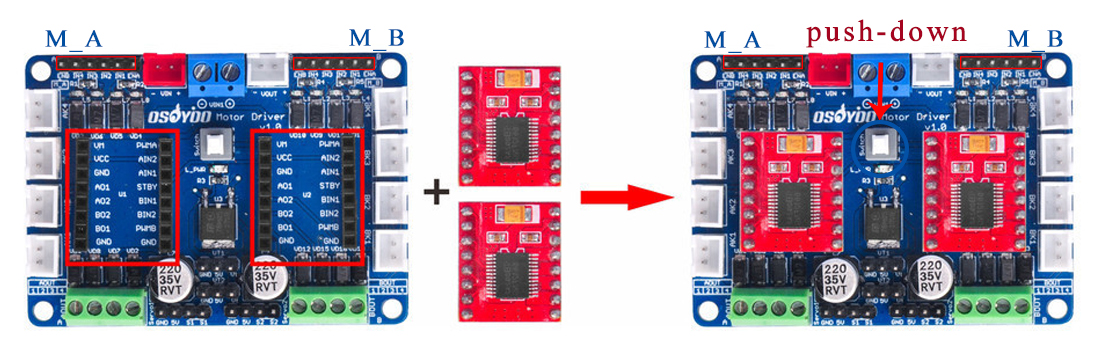
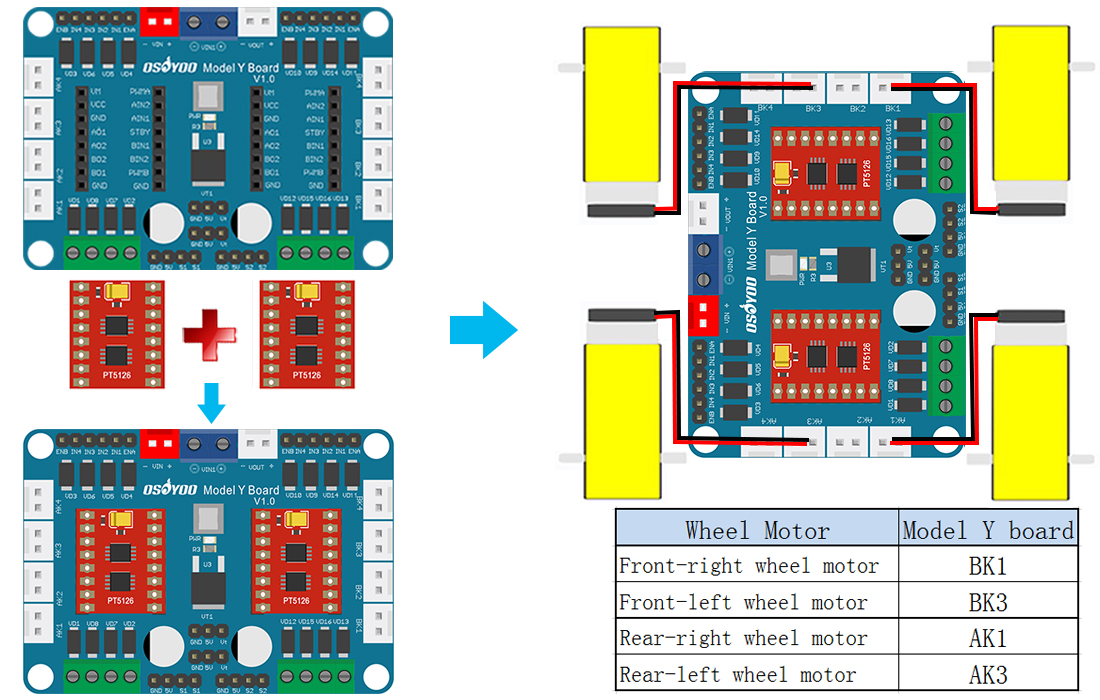
3)Inserisci il modulo TB6612 sulla scheda driver modello Y di OSOYOO.
Se hai ricevuto la scheda driver modello Y V2.0 aggiornata come segue, salta il passaggio 3).
Nota: Il pulsante bianco ha due stati, “PREMUTO” e “ALZATO”, assicurati che il pulsante sia nella posizione “PREMUTO”.
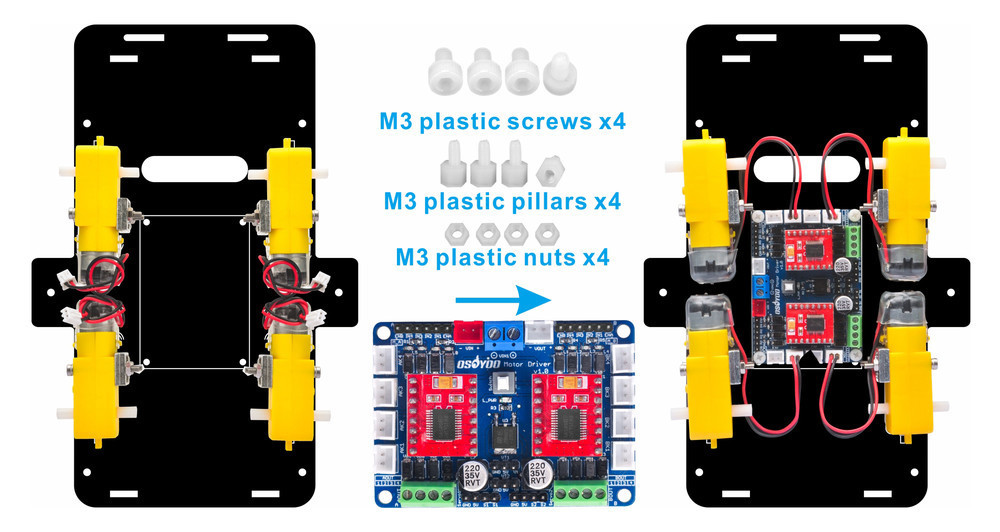
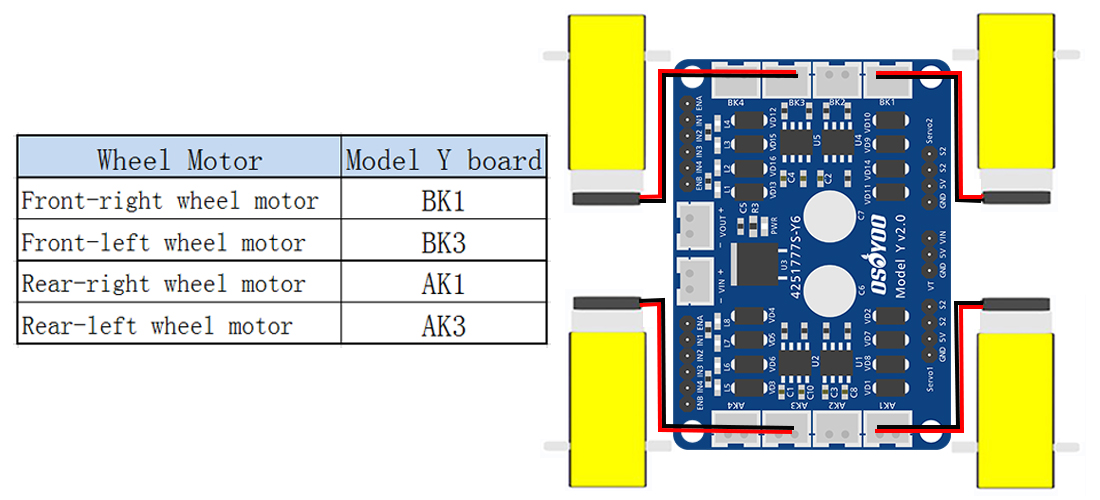
4) Installa la scheda driver modello Y di OSOYOO sul telaio inferiore dell’auto utilizzando 4 viti in plastica M3, supporti in plastica e dadi in plastica. E collega i 4 motori ai connettori K1 e K3 della scheda motori Model Y come indicato nel seguente schema. (Assicurati di installare correttamente la scheda driver MODEL Y di OSOYOO.)
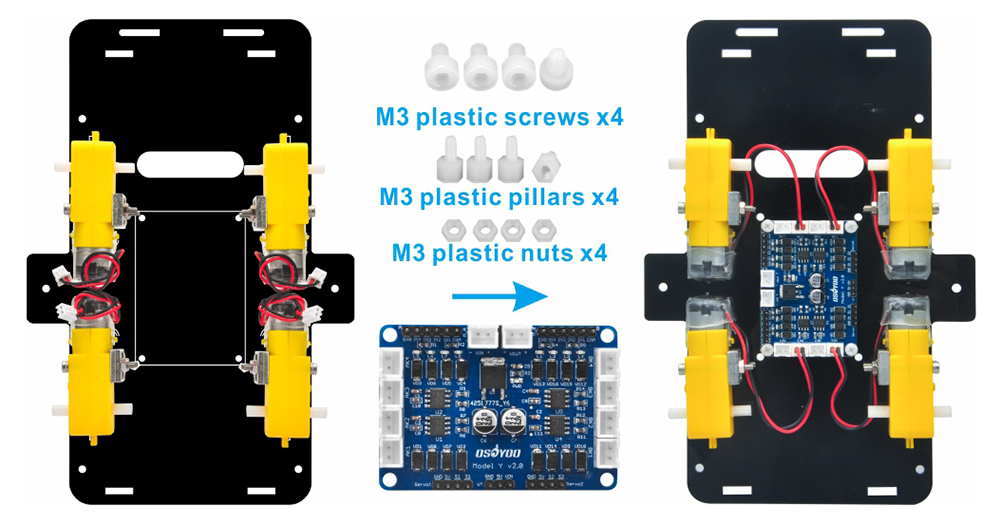
Se hai ricevuto la scheda driver modello Y V2.0 aggiornata, installala come segue.
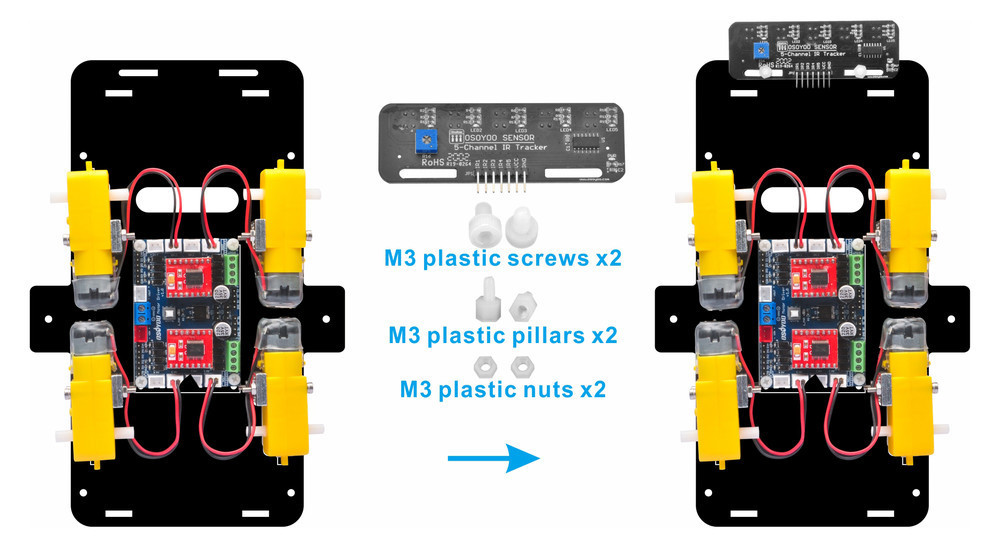
5) Installa i moduli del sensore di tracciamento sul telaio inferiore dell’auto utilizzando 2 viti in plastica M3, supporti in plastica M3 e dadi in plastica M3.
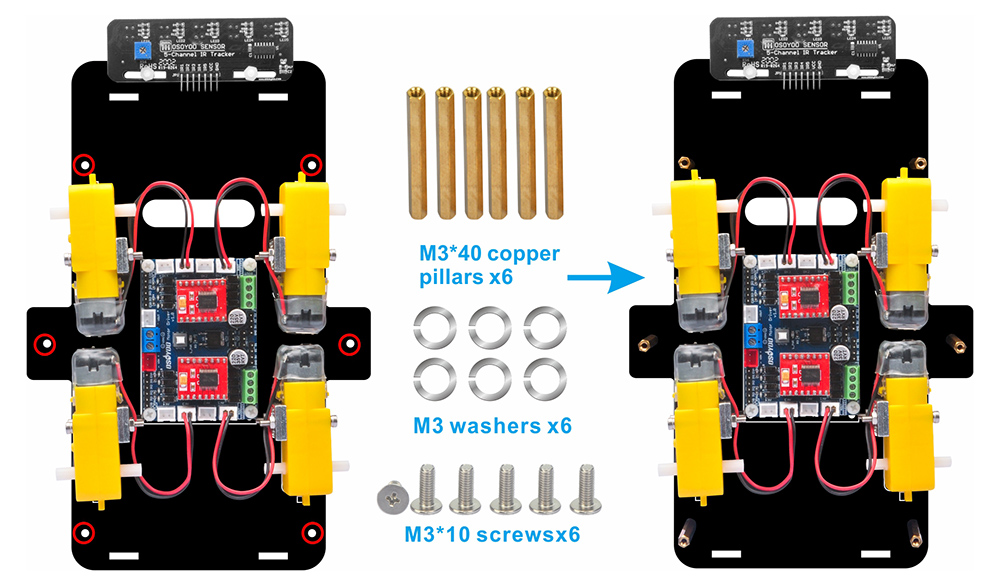
6) Fissa i pilastri in rame con 6 viti M3*10 e 6 rondelle sul telaio inferiore.
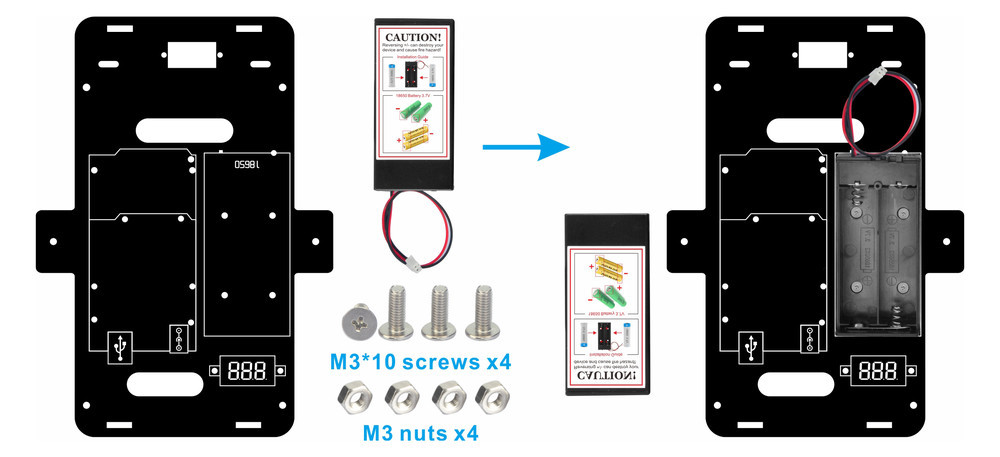
7)Fissa questa scatola batteria sul telaio superiore con 4 viti M3 x 10 e dadi M3.
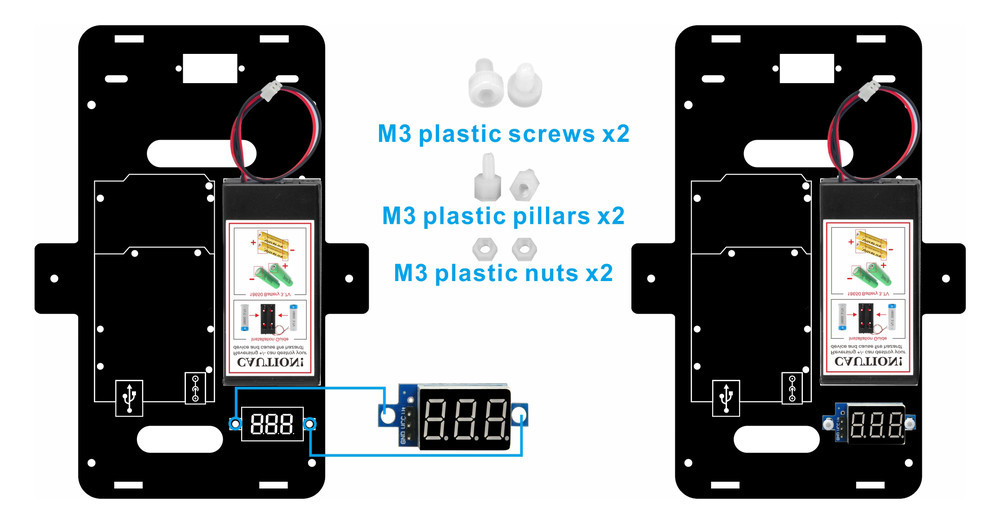
8)Installa il voltmetro sul telaio basso dell’auto utilizzando 2 viti in plastica M3, supporti in plastica e dadi in plastica.
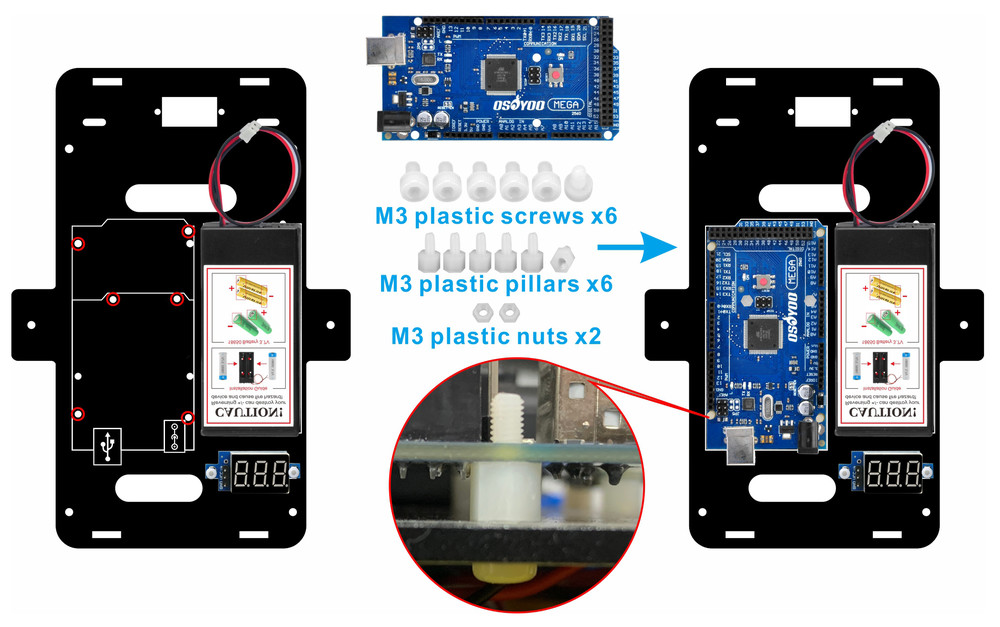
9) Fissa la scheda OSOYOO Mega2560 sul telaio superiore dell’auto utilizzando 6 viti in plastica M3, 6 supporti in plastica e 2 dadi in plastica. (Installare la scheda Mega2560 sul lato con la stampa.)
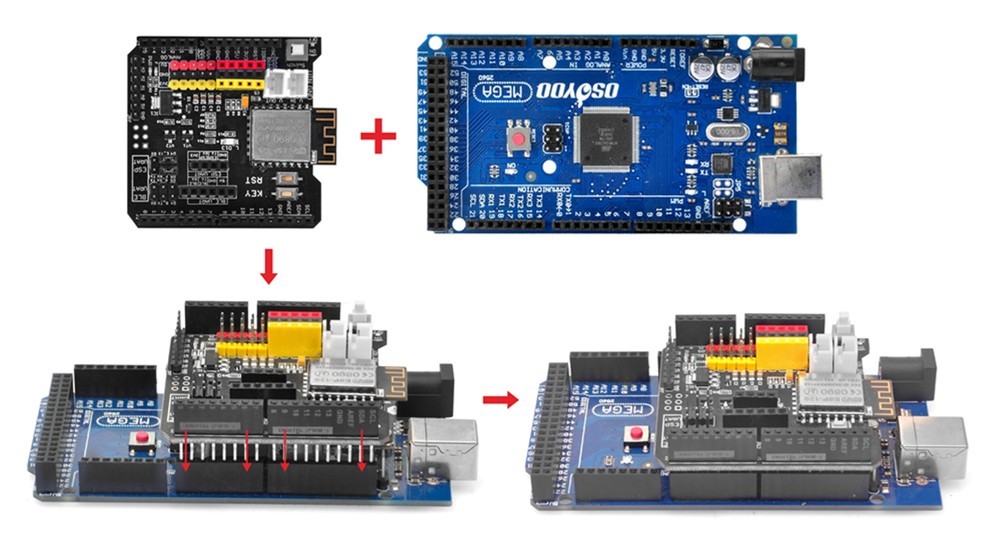
Inserisci lo shield OSOYOO Uart WiFi sulla tua scheda Mega2560.
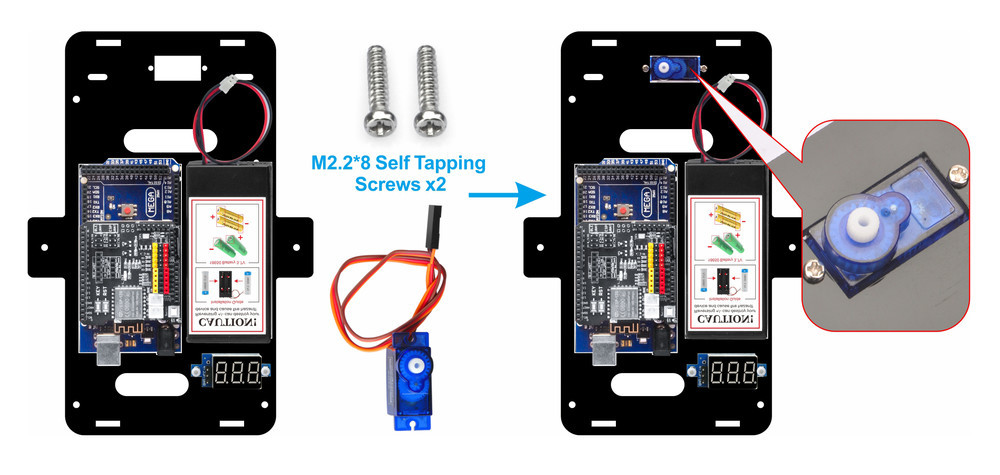
10)Installare il motore servo nella parte anteriore del telaio superiore dell’auto con 2 viti autofilettanti M2.2*8.
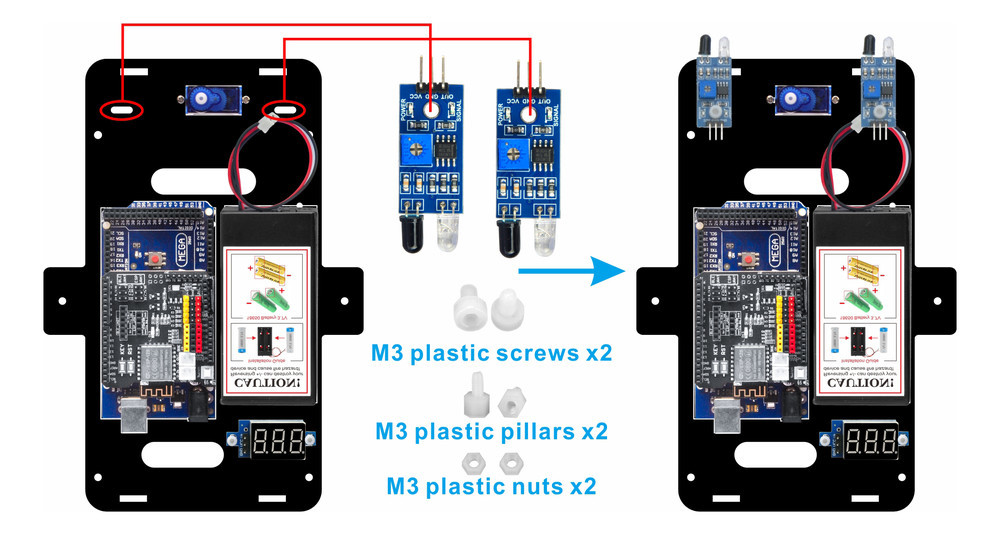
11)Installare 2 sensori di distanza IR con 2 viti in plastica M3, supporti in plastica M3 e dadi in plastica M3 nella parte anteriore del telaio superiore dell’auto. È possibile installare le viti in plastica M3 sotto il telaio superiore per fissare saldamente i sensori di distanza IR.
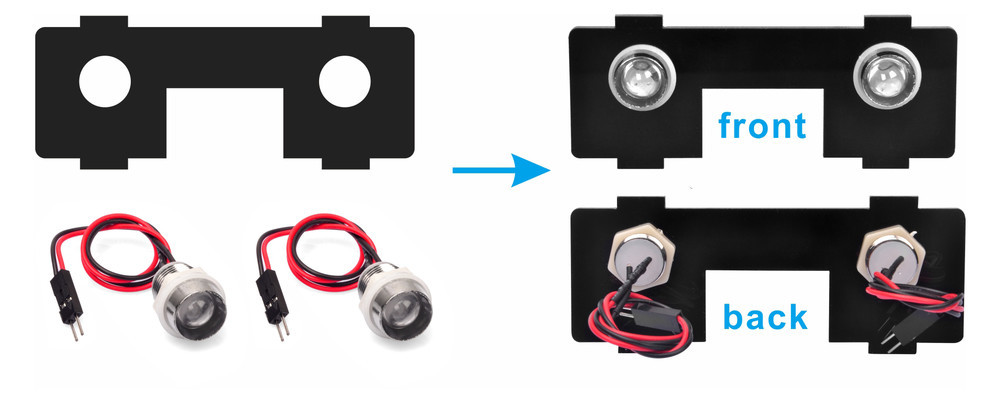
12)Installare 2 luci LED sulla piastra anteriore di protezione come segue.
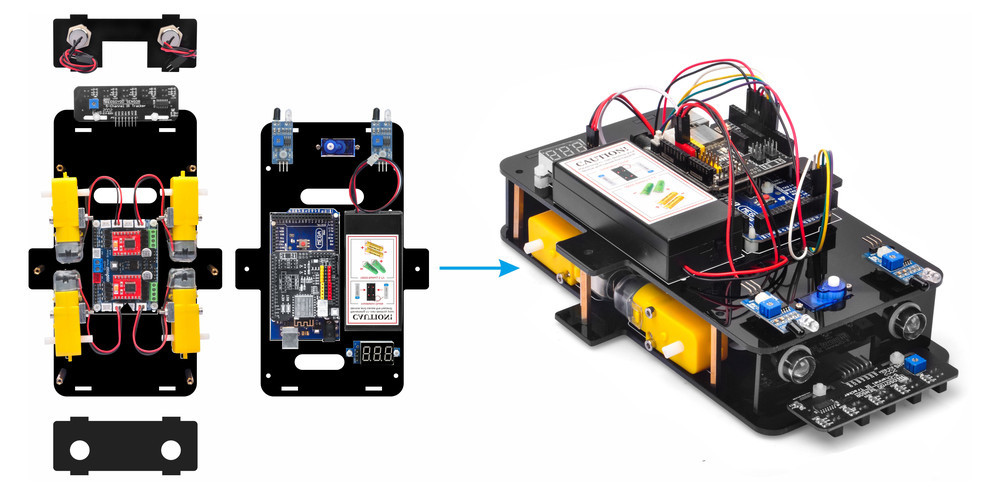
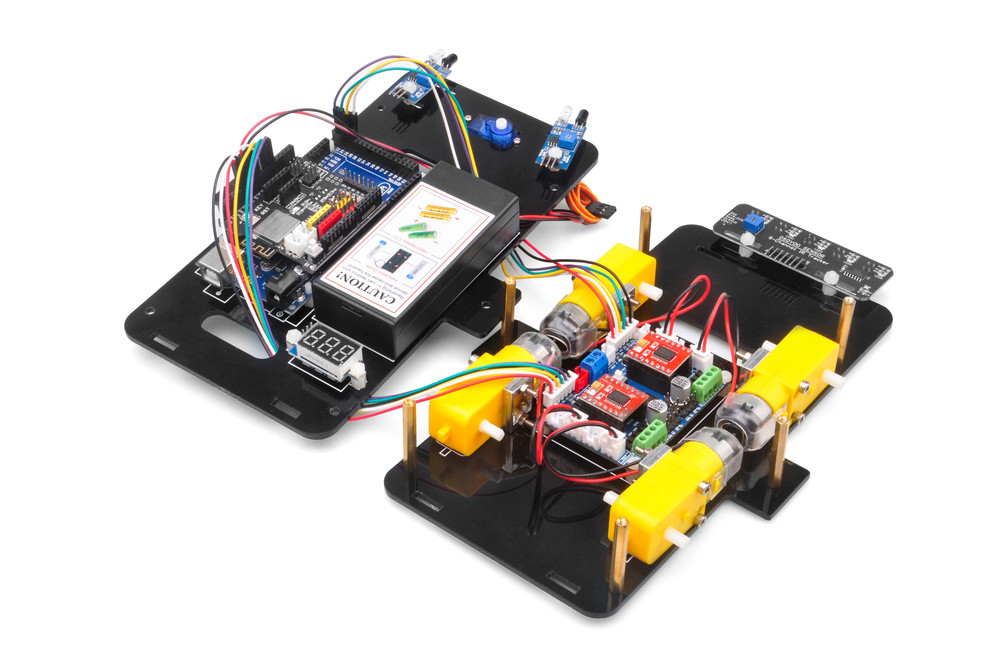
13) Prima di unire il telaio superiore e inferiore in uno, è necessaria la connessione del circuito.
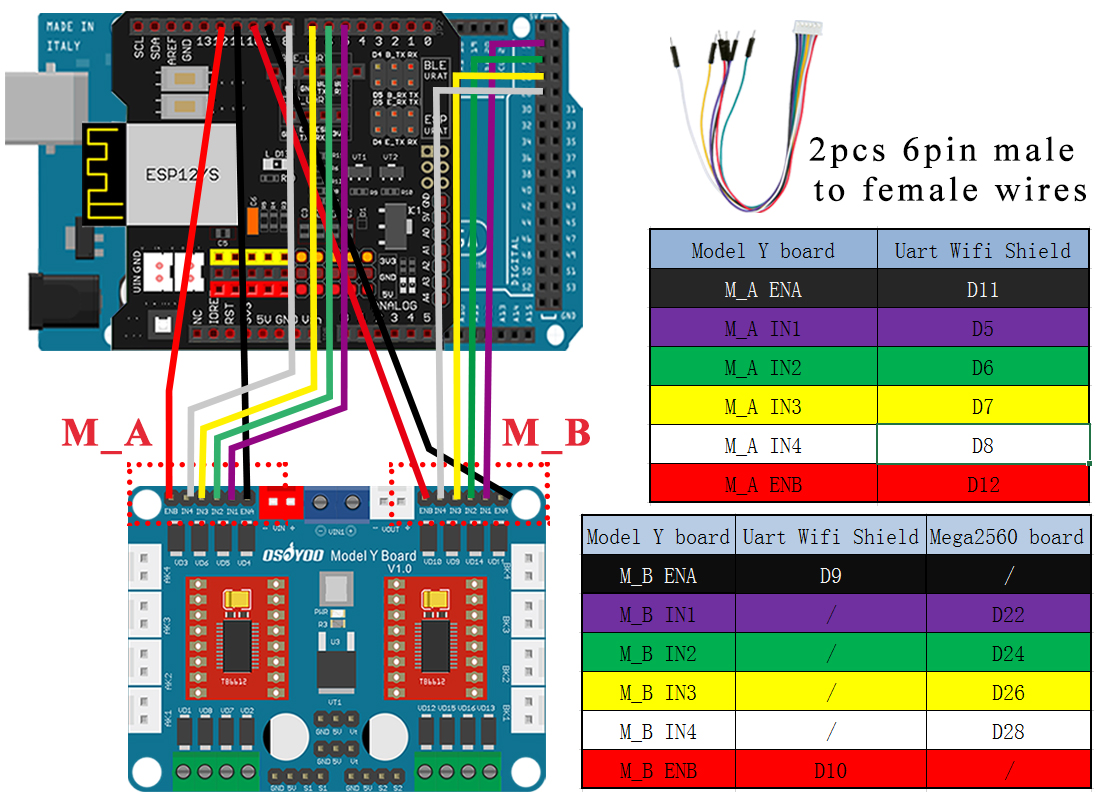
14)Collega la scheda modello Y di OSOYOO allo shield Uart WiFi di OSOYOO utilizzando 2 cavi jumper maschio-femmina a 6 pin come segue. I cavi a 6 pin nell’area B devono passare attraverso il foro vicino al servomotore SG90, mentre gli altri cavi a 6 pin nell’area A devono passare attraverso il foro vicino al voltmetro.
Attenzione:
Quando inserisci/rimuovi questo connettore a 6 pin nella presa maschio a 6 pin del modello Y, tieni premuto il supporto in plastica per effettuare l’operazione. Non tirare i fili per rimuovere il connettore dalla presa, altrimenti si potrebbero danneggiare i fili.
Se hai ricevuto la scheda driver modello Y V2.0 aggiornata, installala come segue.
15)
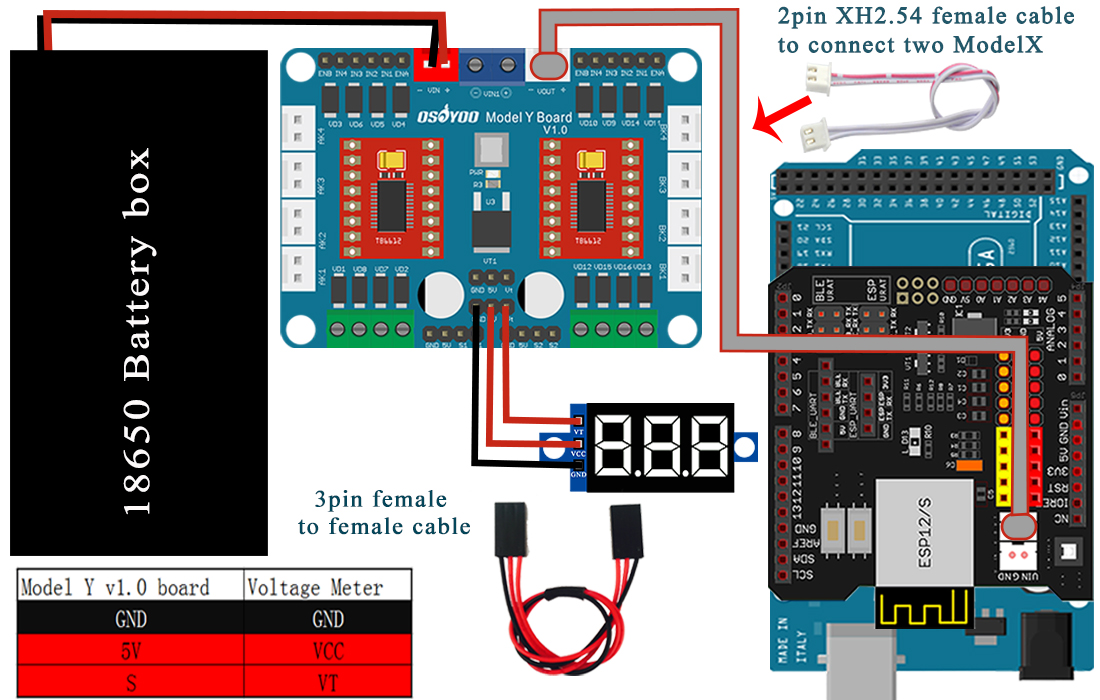
Collega il voltmetro alla scheda modello Y di OSOYOO con un cavo jumper femmina-femmina a 3 pin come indicato nel diagramma di connessione seguente.
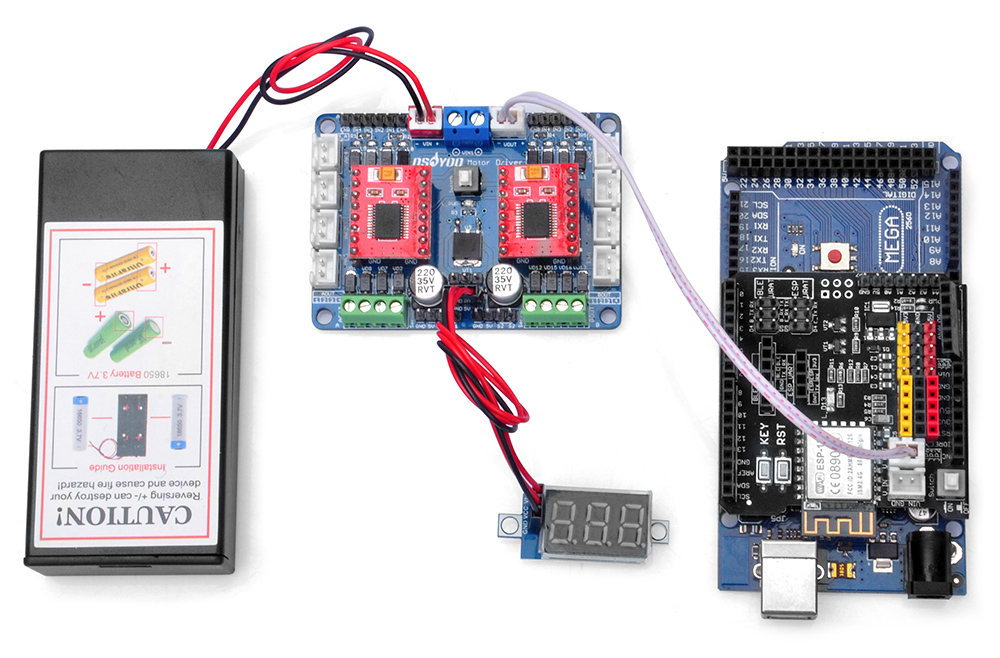
Collega la presa 12V-GND della scheda modello Y di OSOYOO alla presa VIN-GND con un cavo PnP OSOYOO a 2 pin di 20 cm come mostrato nel grafico seguente.
Collega la scatola delle batterie alla presa VIN-GND dello shield Uart WiFi di OSOYOO come indicato nel diagramma di connessione sottostante.
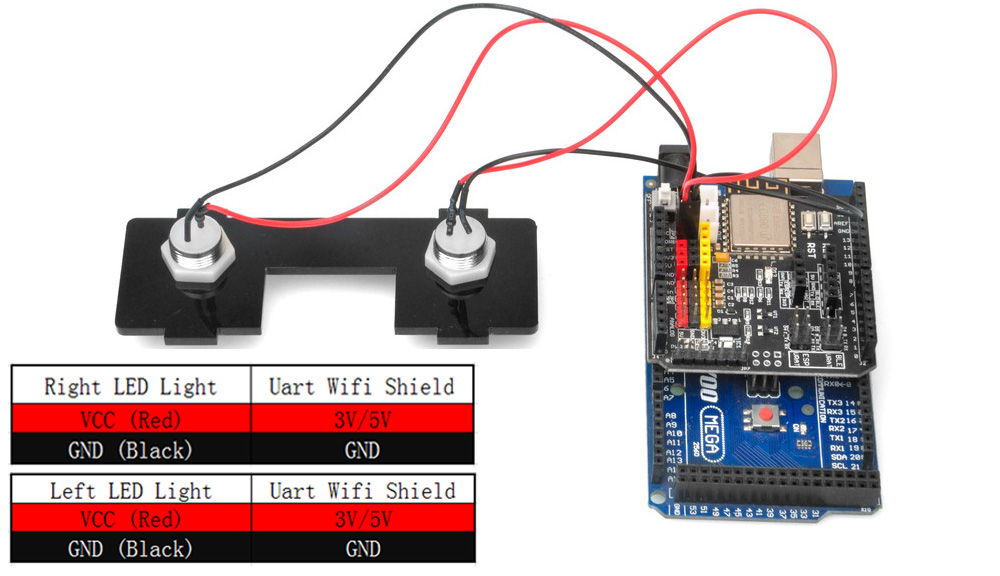
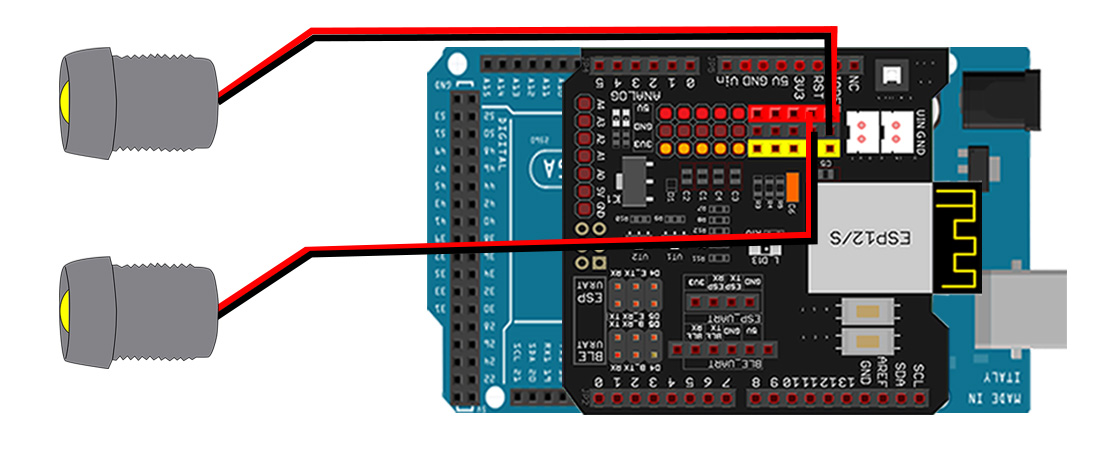
16)Installare 2 luci LED sulla traversa anteriore come segue.
Collegare la luce LED allo shield Uart WiFi di OSOYOO come segue.
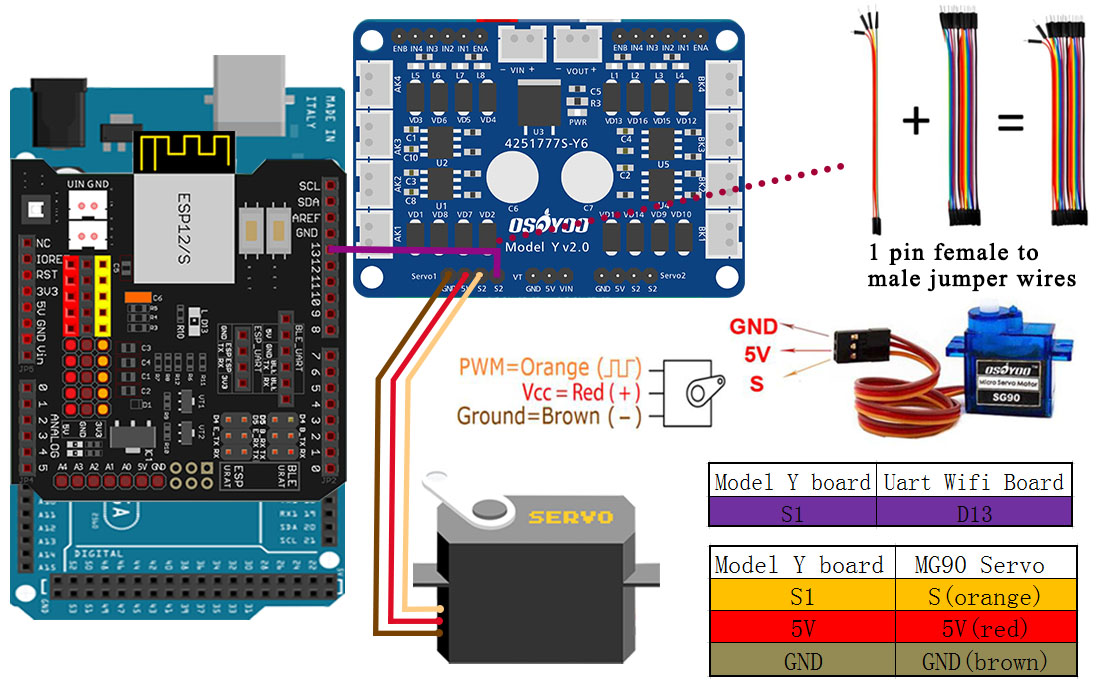
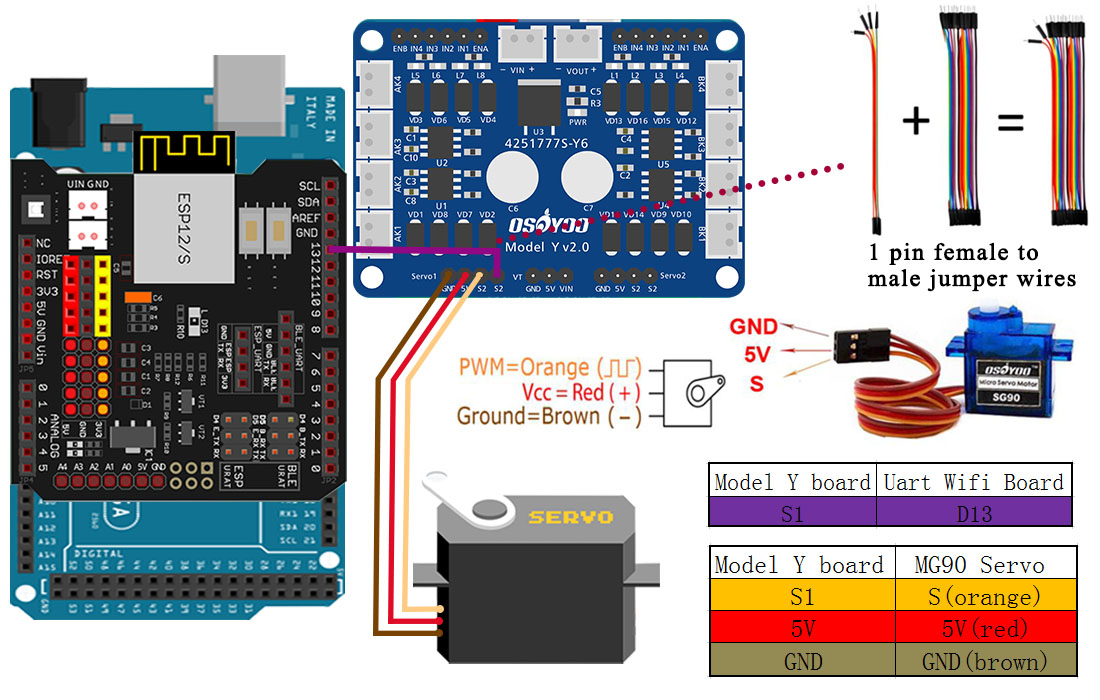
17) Collegare il servomotore SG90, la scheda modello Y di OSOYOO e lo shield Uart WiFi di OSOYOO come indicato nel seguente diagramma.
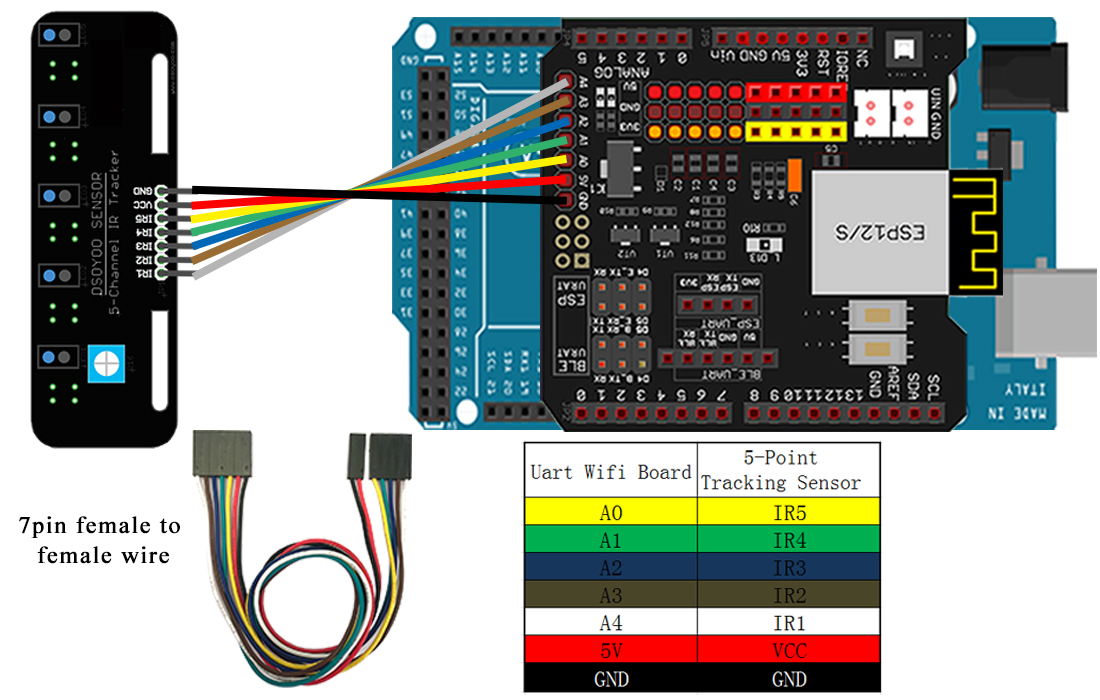
18)Collegare il pin GND-VCC del modulo del sensore di tracciamento al pin GND-5V dello shield Uart WiFi di OSOYOO V1.3; collegare i pin IR1, IR2, IR3, IR4, IR5 ai pin A4, A3, A2, A3, A1 con un cavo femmina-femmina a 7 pin e 25 cm, come mostrato nella seguente foto.
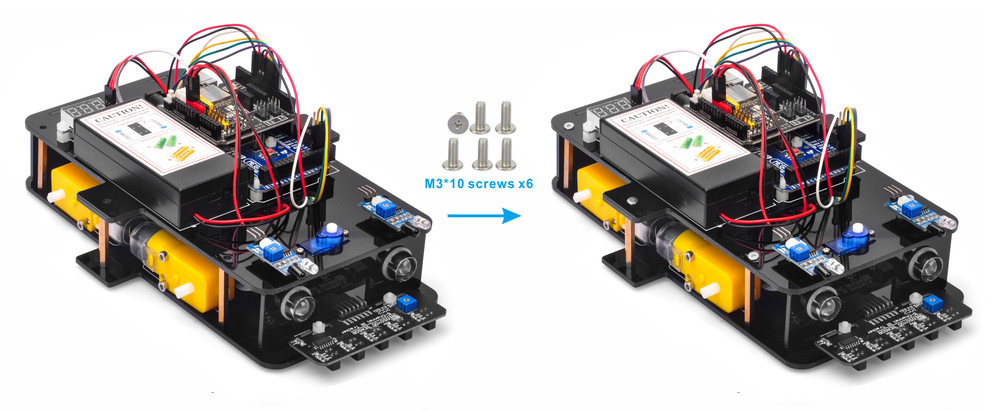
19)Fissa il telaio superiore al telaio inferiore con 6 viti esagonali M3*10.
20)Installa 4 ruote sui motori con 4 viti M2.2×22 o M2.5X20.
Nota speciale: Alcuni utenti potrebbero trovare che la vite M2.2 potrebbe essere troppo corta per fissare la ruota all’auto. Se è questo il tuo caso, ti preghiamo di contattare il supporto OSOYOO ([email protected]) e richiedere gratuitamente nuove viti M2.5×20.
Nota: ci sono due tipi e disporli in modo che i rulli puntino verso il centro dell’auto quando visti dall’alto.
Ora l’installazione hardware è quasi completata. Prima di inserire le batterie 18650 nella scatola, è necessario caricare il codice di esempio nell’Arduino per primo.
Passaggio 1: Installa l’ultima versione dell’Arduino IDE (Se hai già la versione dell’Arduino IDE successiva alla 1.1.16, salta questo passaggio). Scarica l’Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en ,quindi installa il software.
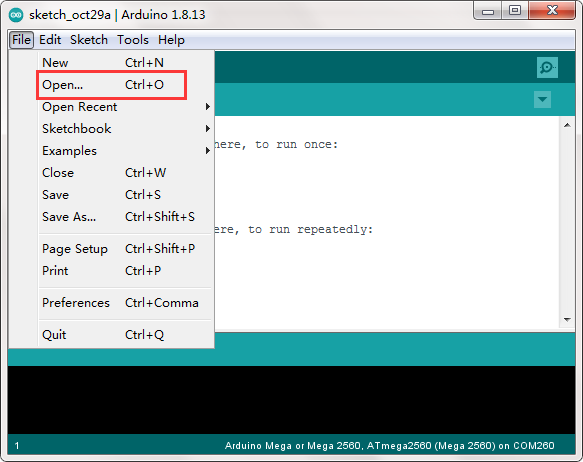
Passaggio 3: Collega la scheda Mega2560 al PC tramite cavo USB, apri l’Arduino IDE -> clicca su “File” -> clicca su “Apri” -> seleziona il codice “mc-lesson1.ino” nella cartella lesson1, carica il codice nell’Arduino.
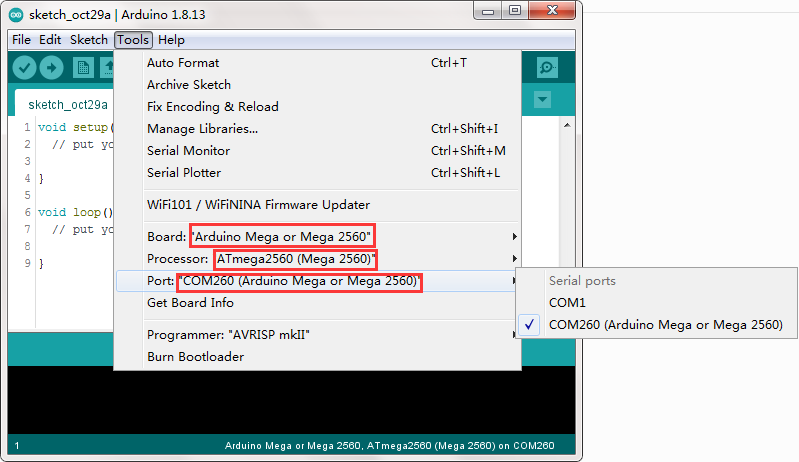
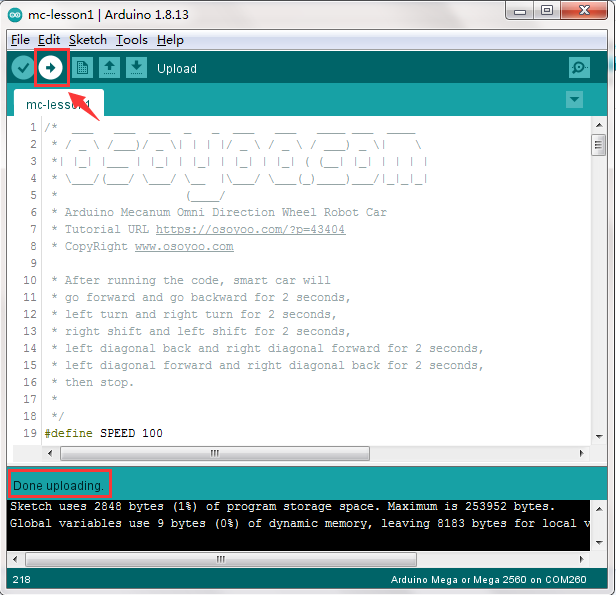
Passaggio 4: Scegli la scheda/porta corrispondente per il tuo progetto, carica lo sketch sulla scheda..
Nota: Se l’auto si muove tramite USB (ovvero le ruote girano quando non toccano il suolo) ma non funziona quando l’USB viene scollegato e le batterie sono correttamente inserite, controlla l’interruttore del doppio driver Y sulla scheda: probabilmente è stato spostato in posizione alta. Può essere abbassato con un cacciavite senza dover separare la parte superiore e inferiore.
Scollega Arduino dal PC, inserisci la batteria nella scatola delle batterie. Quando metti l’auto a terra, accendi l’interruttore sullo shield OSOYOO Uart WIFI V1.3 e l’interruttore sulla scatola delle batterie se hai installato una scatola per batterie 18650.
L’auto dovrebbe muoversi Avanti → Indietro → Svolta a sinistra → Svolta a destra → Spostamento parallelo destro → Spostamento parallelo sinistro → Diagonale in basso a sinistra → Diagonale in alto a destra → Diagonale in alto a sinistra → Diagonale in basso a destra, quindi si ferma.













Thank You.