The OSOYOO FlexiRover Robot Car Kit for Arduino Mega2560 is a versatile robotics platform designed for advanced users. It includes a Mega2560-compatible board with a WiFi expansion module, allowing remote control and monitoring. The kit is equipped with four powerful 520 motors, with the rear motors featuring encoders for precision control, making it ideal for accurate movement in robotic applications.
Key Features:
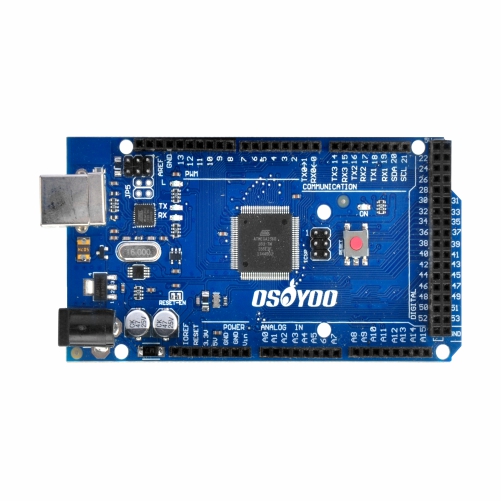
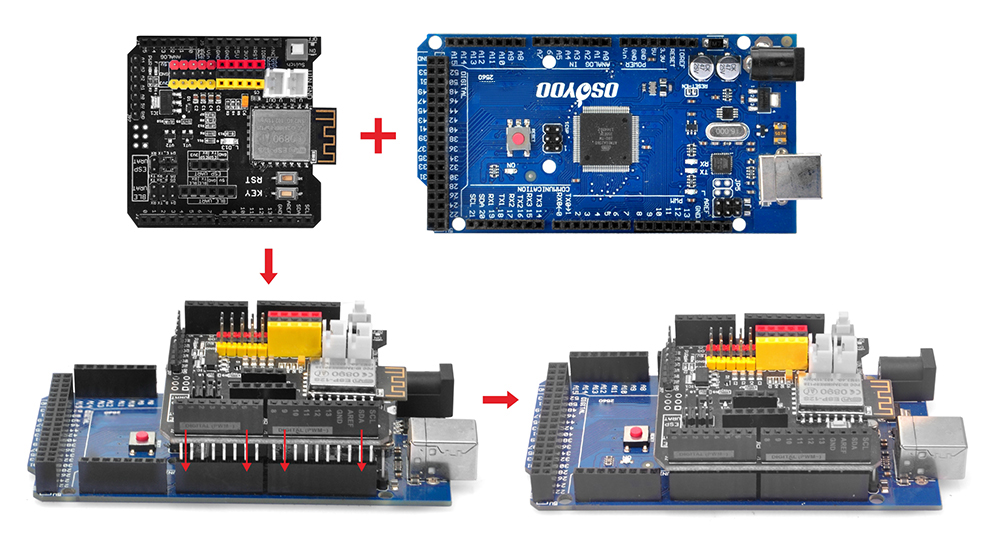
Mega2560 Board with WiFi: The Mega2560-compatible board for Arduino, paired with a WiFi module, enables wireless connectivity for remote control, IoT applications, and data transmission, expanding the scope of robotic projects.
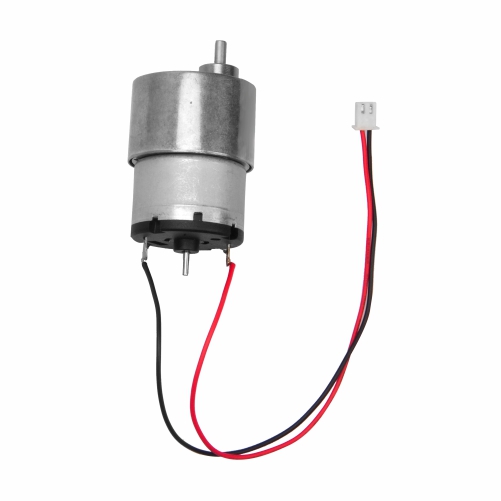
520 Motors with Encoders: The 520 motors ensure smooth movement, while the rear encoders provide precise control of speed and direction, perfect for navigation and obstacle avoidance tasks.
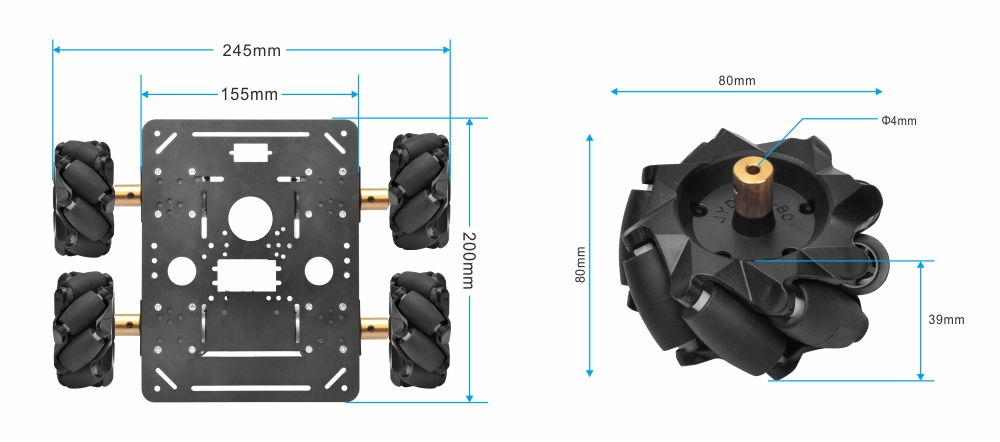
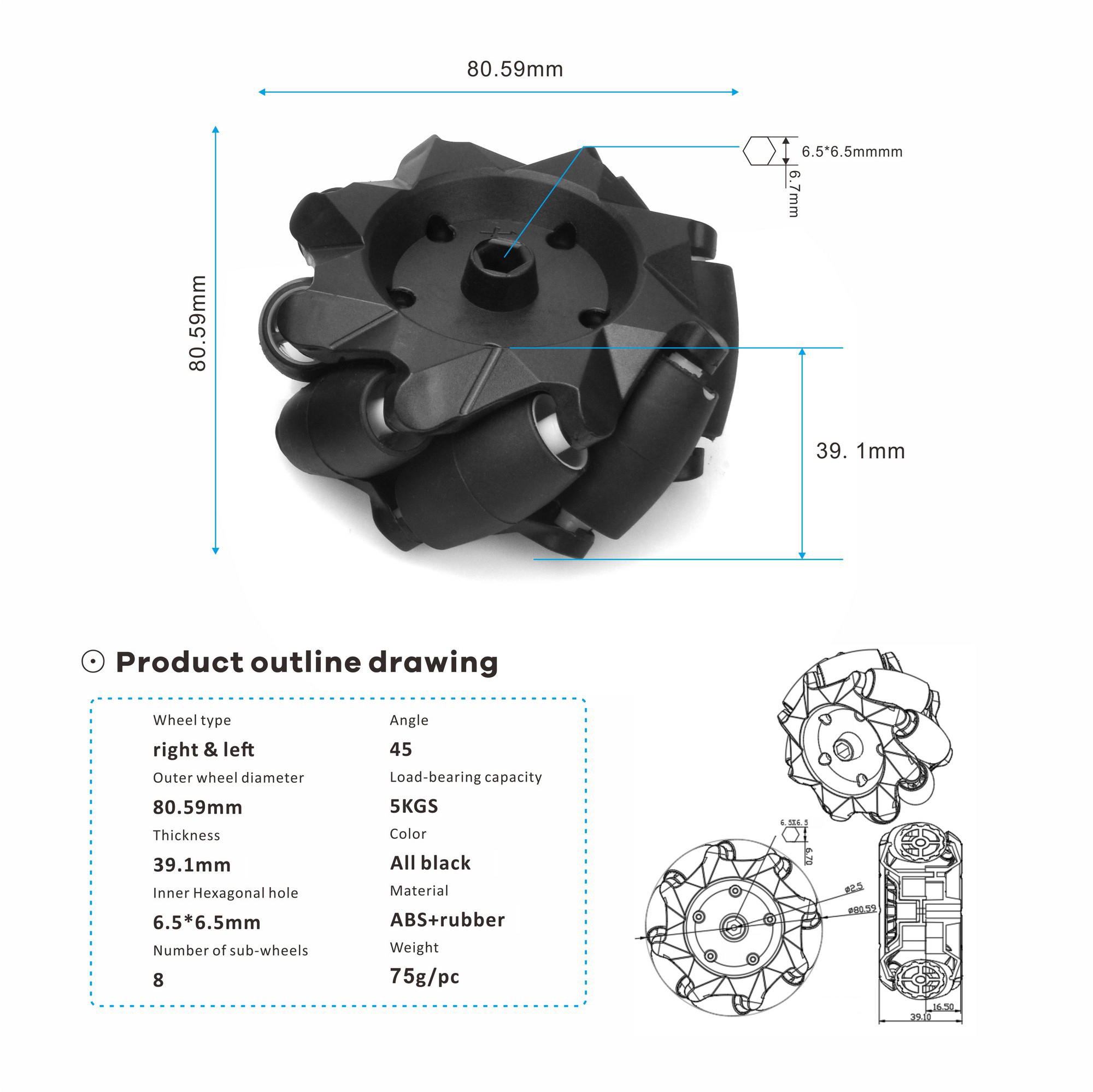
Mecanum Wheels for Omnidirectional Movement: included Mecanum wheels allow the robot to move in any direction, making it versatile for complex environments and applications requiring agile navigation.
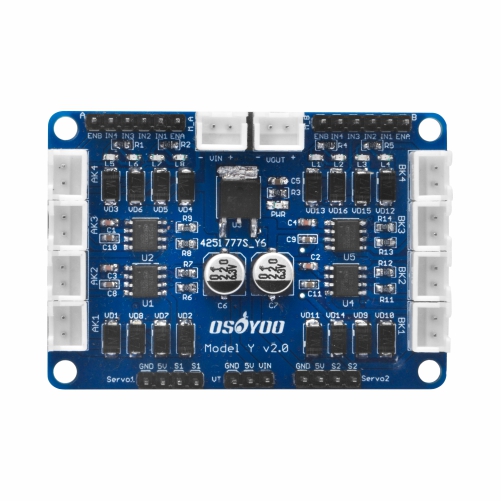
Motor Driver Board for 4-Wheel Drive: The OSOYOO Model Y motor driver board controls up to four motors independently, allowing for advanced control schemes and flexible driving mechanisms.
Customizable Chassis: The chassis features pre-drilled holes for mounting additional components like sensors, arms, or cameras, enabling users to customize their robot for specific tasks.
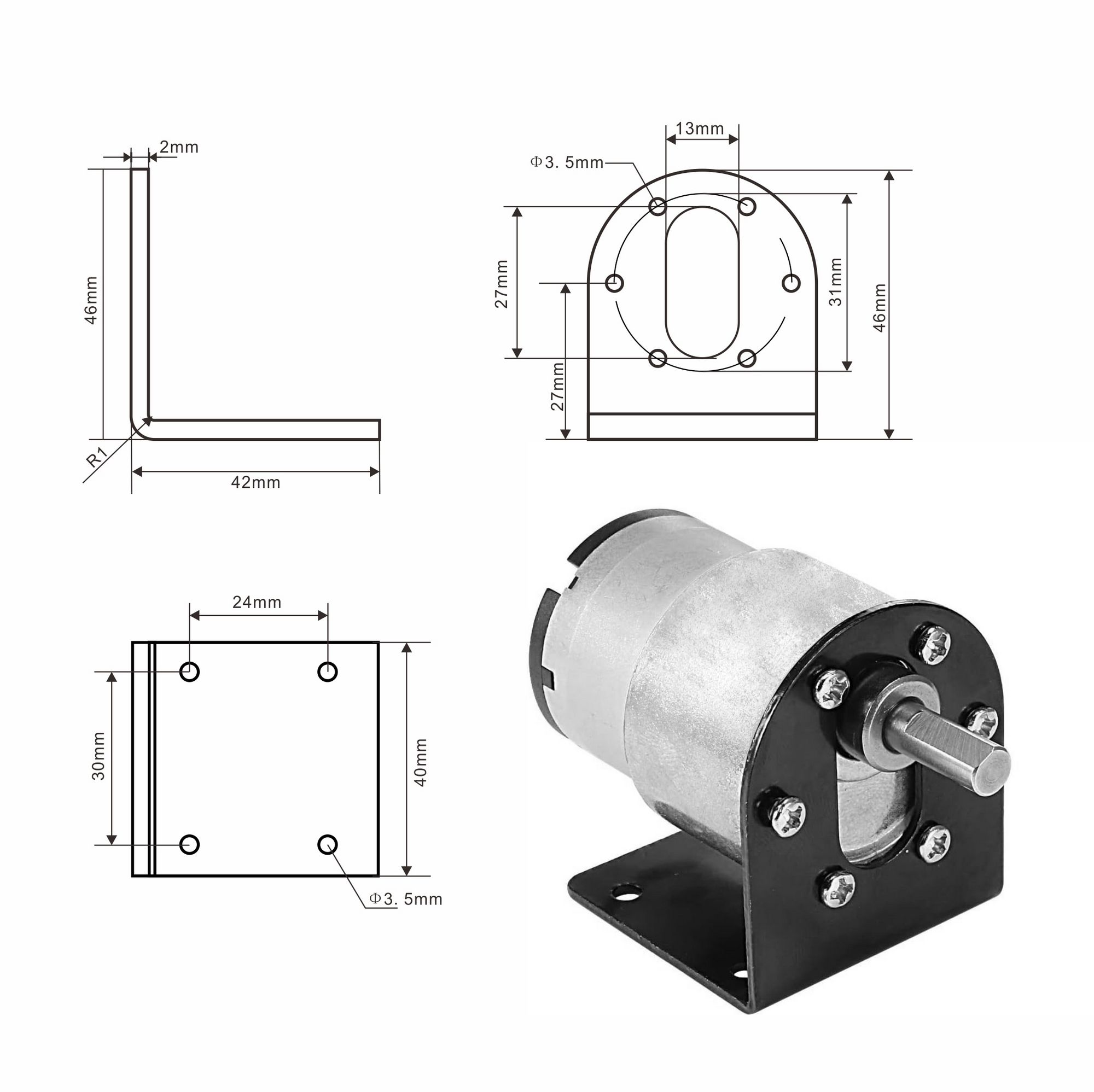
37mm Metal motor holder —— Compatible with JGB37-550/545/520.. Super High Torque Motor
25mm Metal motor holder —— Compatible with JGB25-370/310… High Torque Motor
TT metal motor Holder —— TT motor
Red Circle (reference the following picture)
For OSOYOO Model Y motor driver/ OSOYOO Model X motor driver/ L298N motor driver
Green Circle (reference the following picture)
For SG90/MG995/MG996 servo motor
Yellow Circle (reference the following picture)
For 18650 battery case / 9V Battery case…
Pink purple Circle (reference the following picture)
For Line tracking sensor / OSOYOO 5 channel tracking sensor / IR obstacle / IR receiver/ IR transmitter …
Purple Circle (reference the following picture)
For Arduino UNO R3 / Arduino UNO R4 / Arduino UNO WIFI …
For Arduino Mega2560 / Arduino DUE
Dark blue Circle (reference the following picture)
For Raspberry Pi 5/4/3B/3A+/3B+/2B
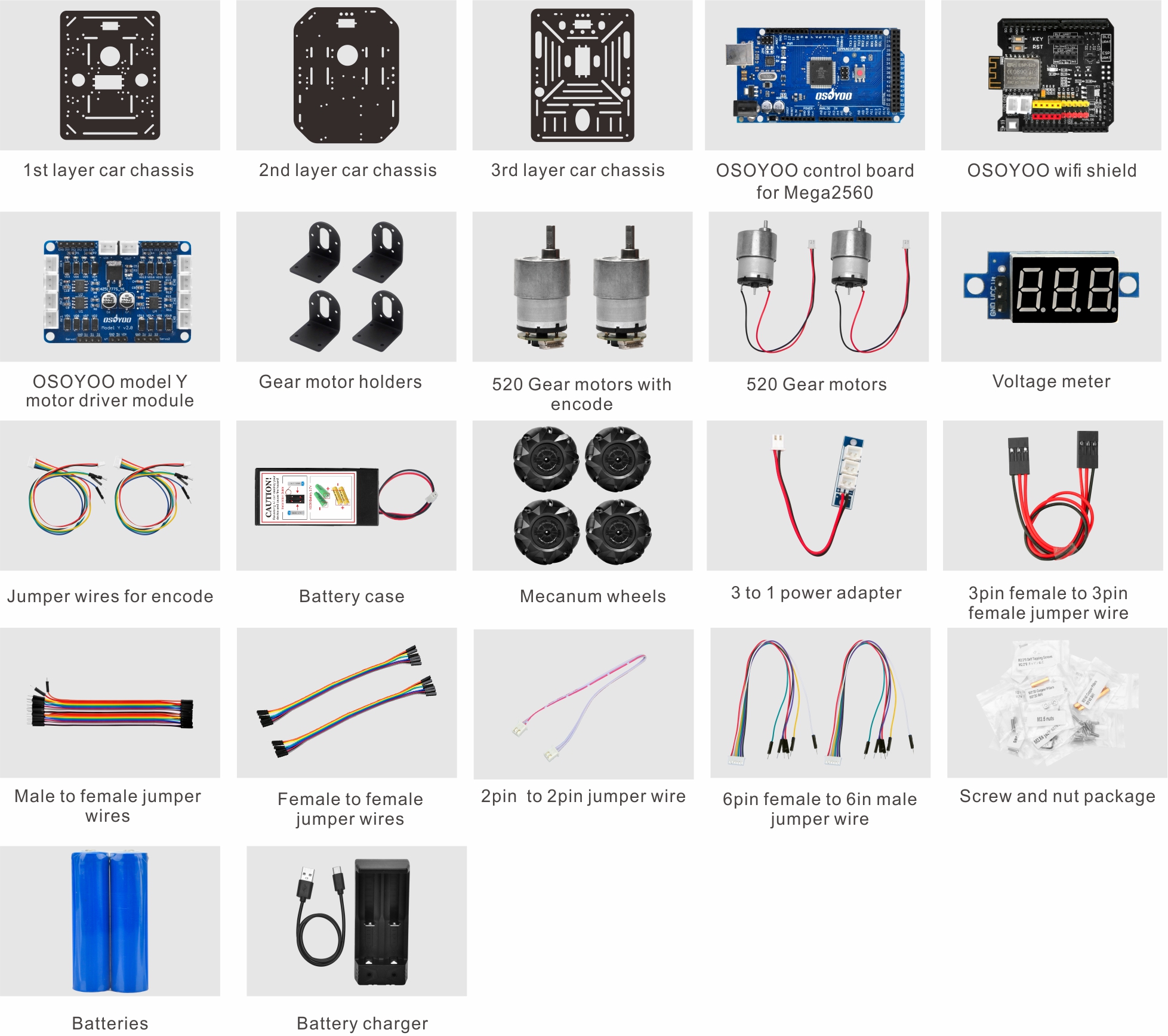
Package List
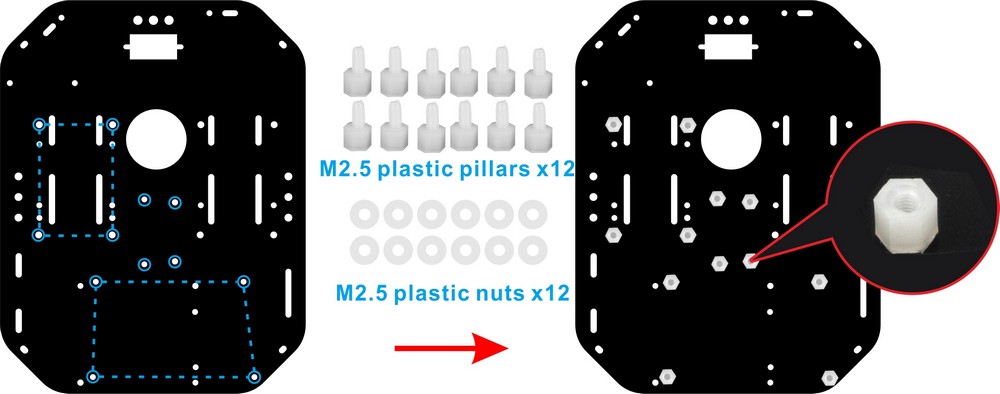
Hardware installation
Install devices
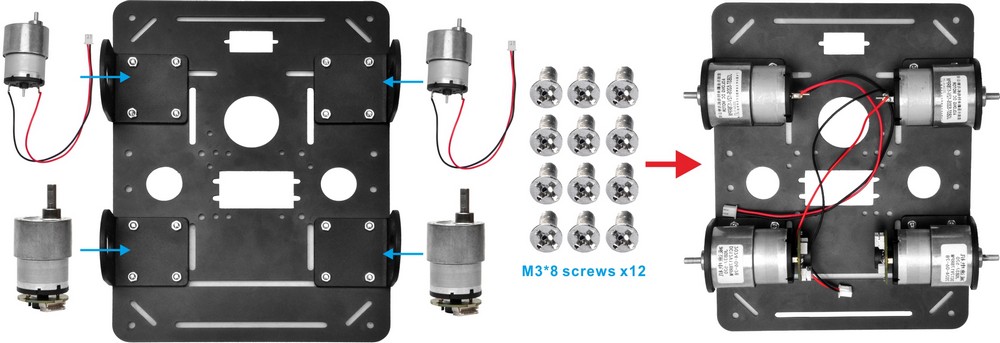
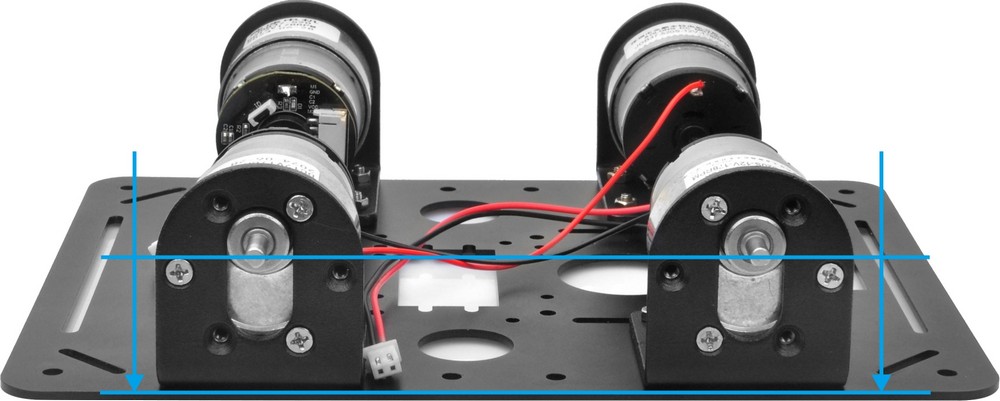
Step 1. Install the gear motor holder on 1st layer car chassis(metal) with M3*10 screws and M3 nuts as following pictures. Step 2. Install 2pcs 520 gear motors with cable on gear motor holders which stand at the front of chassis and 2pcs 520 motor with encode on gear motor holders which stand at the back of chassis with M3*8 screws.
Note: Please keep 4 axis of motors at the same level
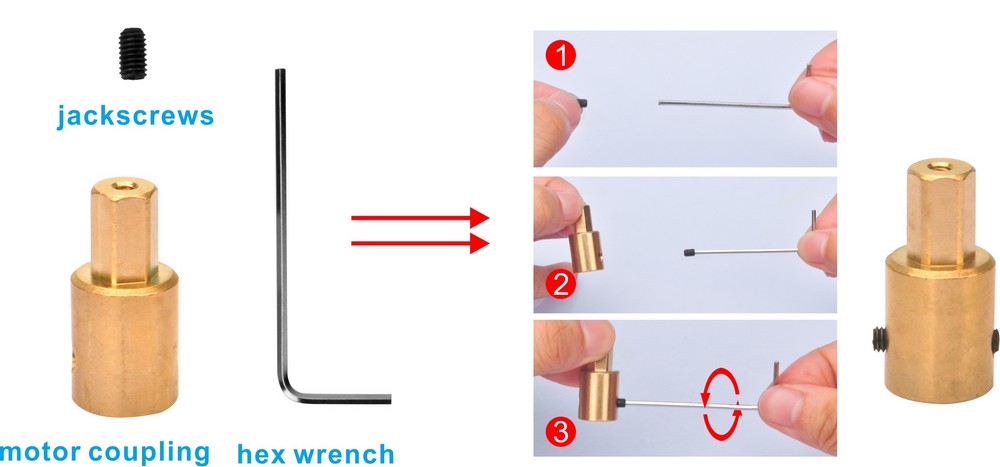
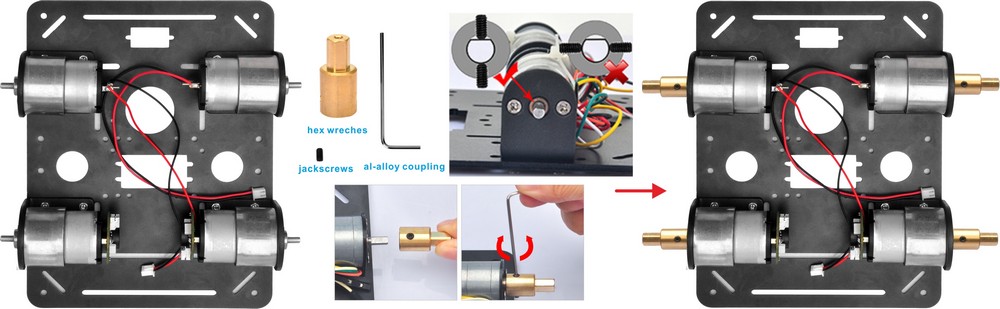
Step 3. Install the jack screws on Al-alloy coupling, please tighten jack screws to fix the Al-alloy coupling on motor as following pictures. Note: The axis of 520 gear motor has a plain side. Make sure that one of jackscrews is positioned at this flat, and tighten both jackscrews on the axis.
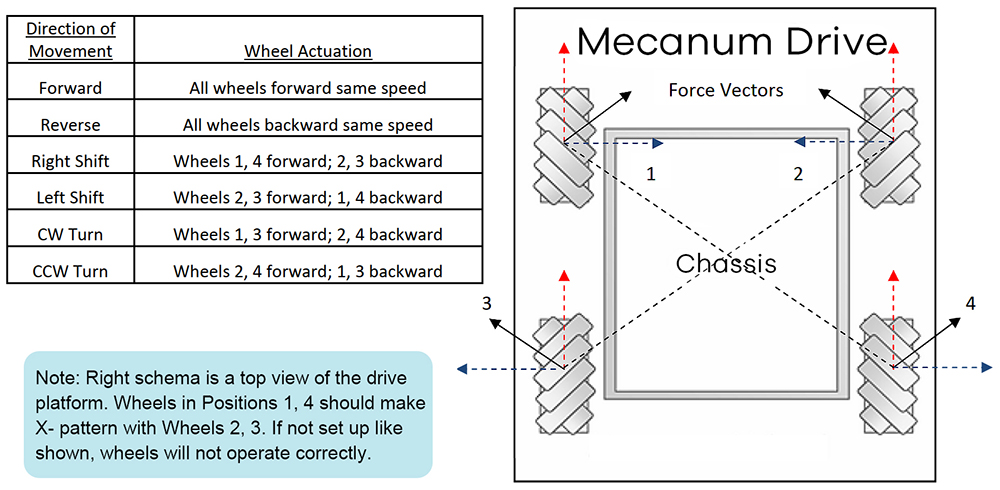
Step 4. Install the 4 Mecanum wheels on al-alloy coupling with 4pcs M2.5*20 as following pictures:
Note: There are two types of Mecanum wheels, left and right Mecanum wheel; the difference between them is the orientation of rollers. A correct configuration requires each of four wheels is set in the way as shown below, where the rotation axis of each wheel’s top roller points to the center of the platform. Please notice that all the dynamic analysis and pre-written codes are based on this configuration.
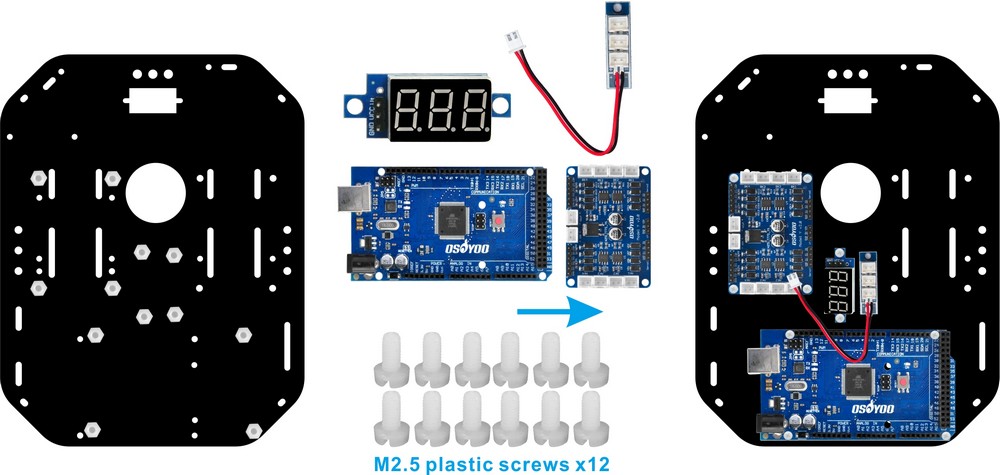
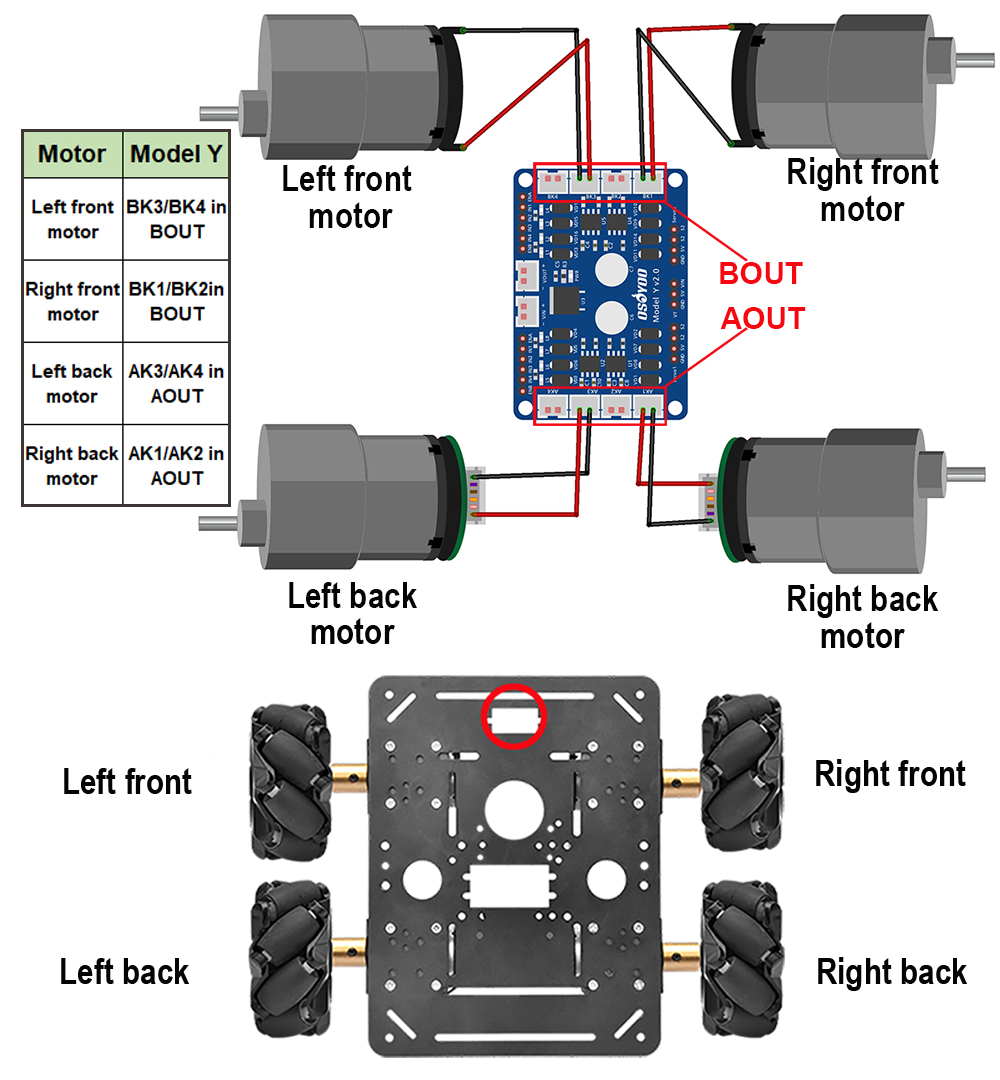
1. Connect 4 motors to model Y driver board as the following pictures.
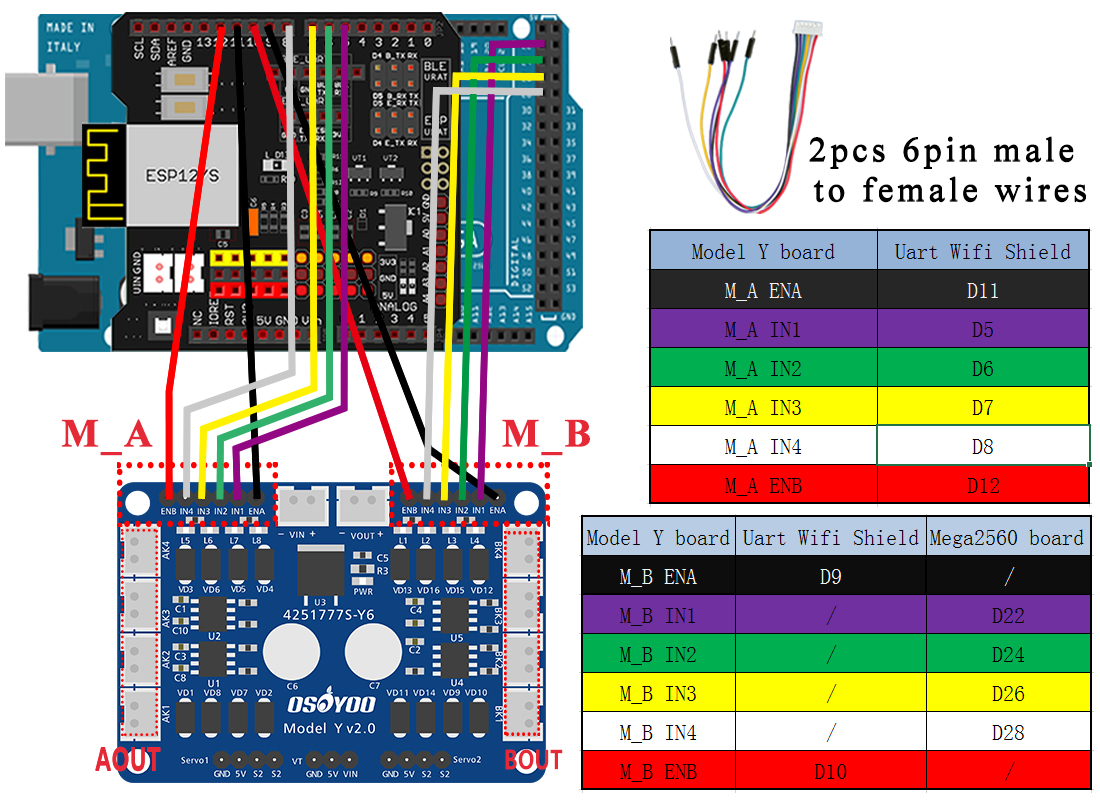
2. M_A ENA, IN1, IN2, IN3, IN4, ENB of model Y connect to D11, D5, D6, D7, D8, D12 of Wifi shield.
M-BENA, ENB of model Y connect to D9, D10 of WIfi shield, and M_B IN1,IN2,IN3,IN4 of model Y connect to D22,D24,D26,D28 of OSOYOO control board of Mega2560.
Caution:
When insert/remove the 6-pin parallel cable plug into Model Y 6-pin male socket, please hold the white plastic pin-holder to do operation. Never drag the wires to pull the plug out of the socket, otherwise it will damage the wires.
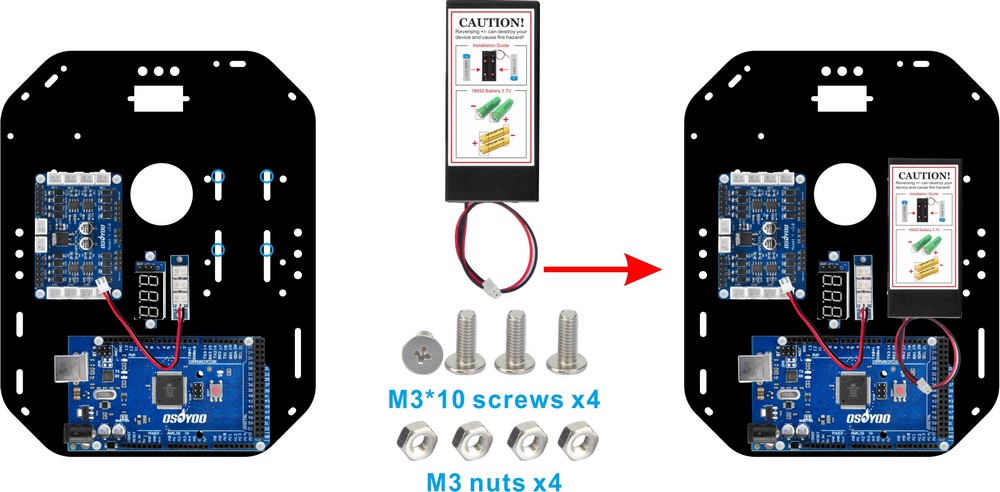
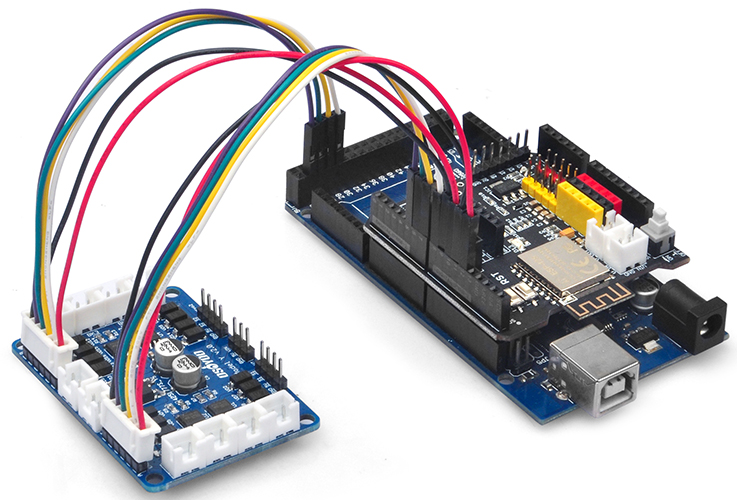
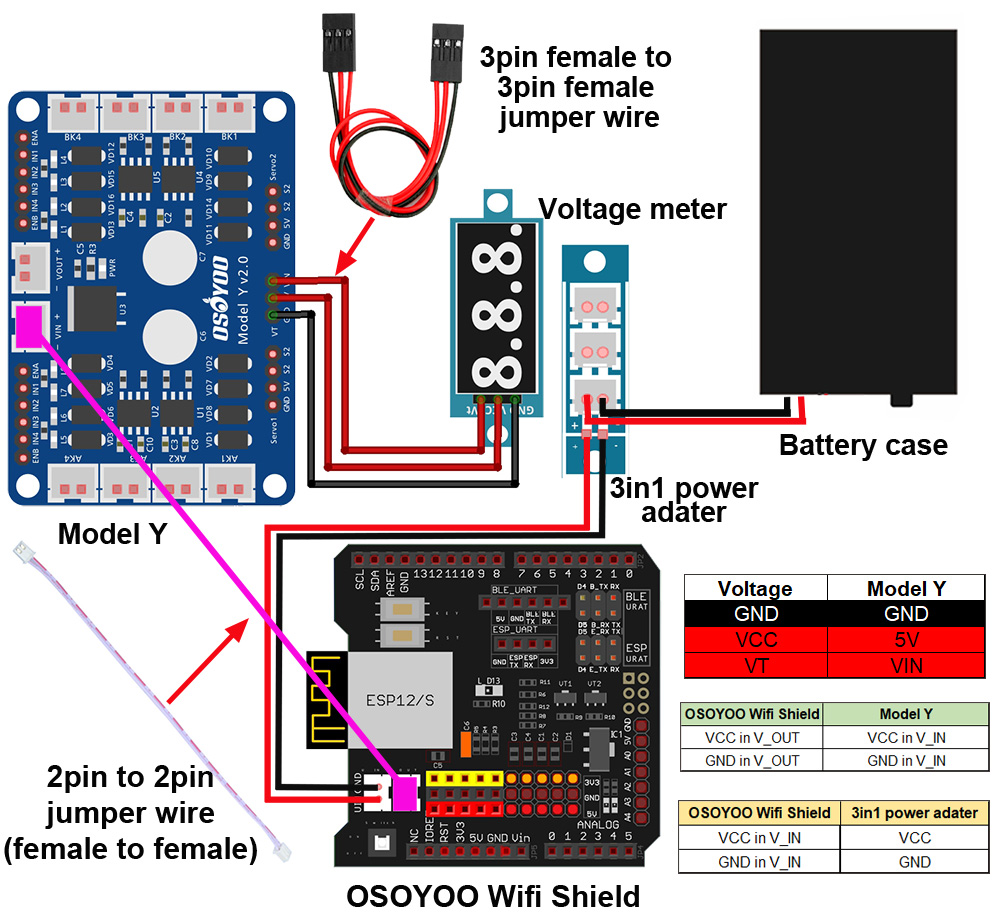
3. Connect voltage meter to model Y motor driver board with 3pin female to 3pin female jumper wire; connect V_OUT socket of OSOYOO WIFI shield to VIN socket of Model Y motor driver board with 2pin to 2pin jumper wire (female to female); insert 2pin plug(s) of battery case(s) into 3in1 power adapter; insert 2pin plug of 3in1 power adapter into V_IN socket of OSOYOO WIFI shield as following:
Note: 3in1 power adapter is for multi battery case with the same voltage.
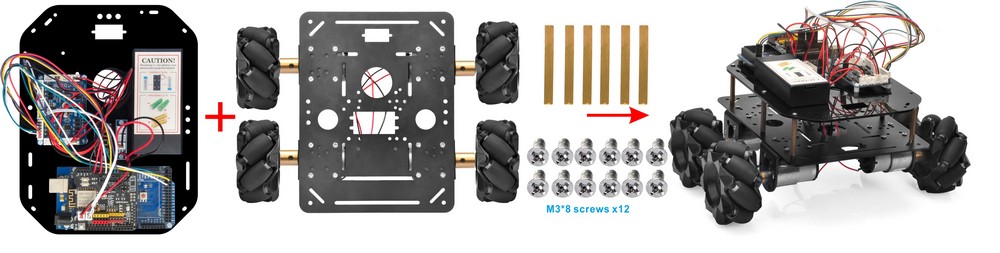
4. Install 2nd layer car chassis on 1st layer car chassis with M3*40 pillars. Please note the front and back of acrylic chassis and metal chassis. The robot car can work when completing this step
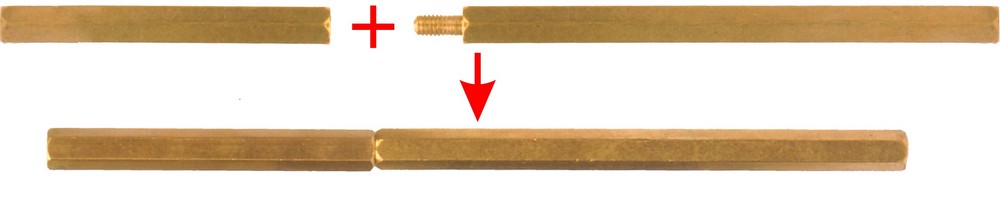
5. If you want to add more sensor, you can install 3rd layer car chassis on the robot car. Tightly screw M3*40 copper pillar with M3*65+6 copper pillar to be long pillar firstly, then Install 3rd layer car chassis on 1st layer car chassis with these long pillars
Sample project
Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step). Download Arduino IDE from https://www.arduino.cc/en/Main/Software?setlang=en, then install the software.
Step 3: Connect Mega2560 board to PC with USB cable, Open Arduino IDE → click file → click Open → choose code “lesson1.ino” in lesson1 folder, load the code into Arduino.
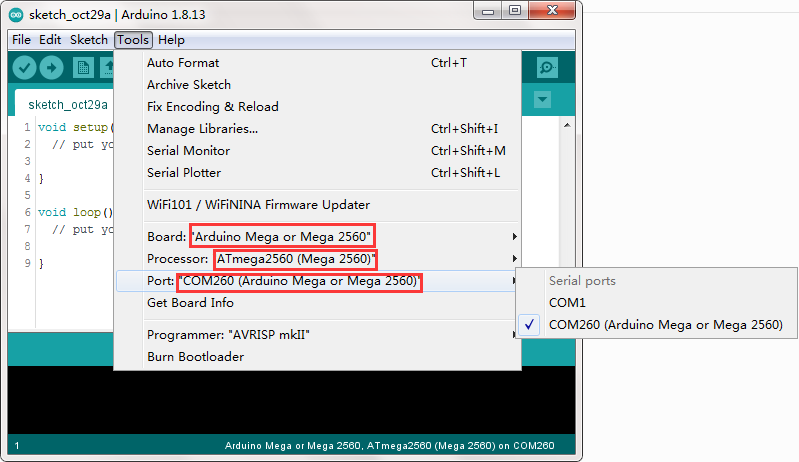
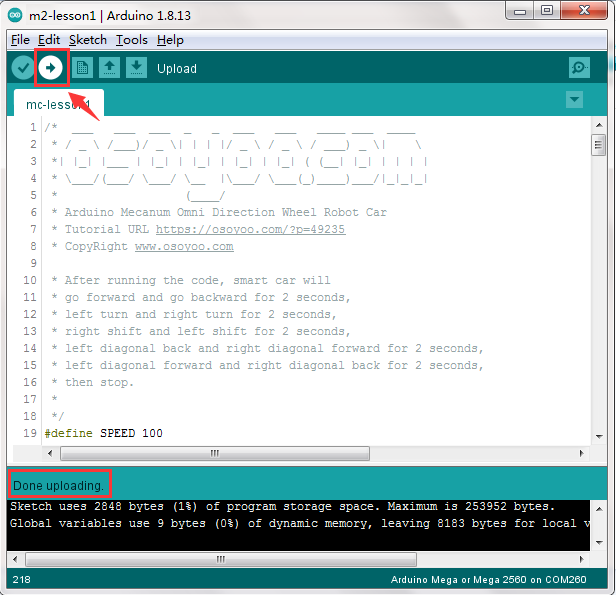
Step 4: Choose corresponding board/port for your project, upload the sketch to the board.
Disconnect Arduino from PC, put battery into battery box. Put the car on the ground, and turn on the switch on OSOYOO Uart Wi-Fi shield and the switch on battery box.
The car will move Forward→Backward→Left turn→Right turn→Right Parallel Shift→Left Parallel Shift→Up Right Diagonal→Down Left Diagonal→Up Left Diagonal → Down Right Diagonal











































{kind=link}
{kind=link}