このレッスンでは、モバイルを使用してロボットカーを制御し、模倣運転を行います。模擬運転であるため、APPで仮想ステアリングホイールとギアを使用して、実際の車の対応するものを模倣します。
このレッスンを続行する前に、レッスン 2 の基本動作を完了しておく必要があります。
車のフレームを完成させない場合は、レッスン1を確認してください

部品・装置
ワイヤ接続
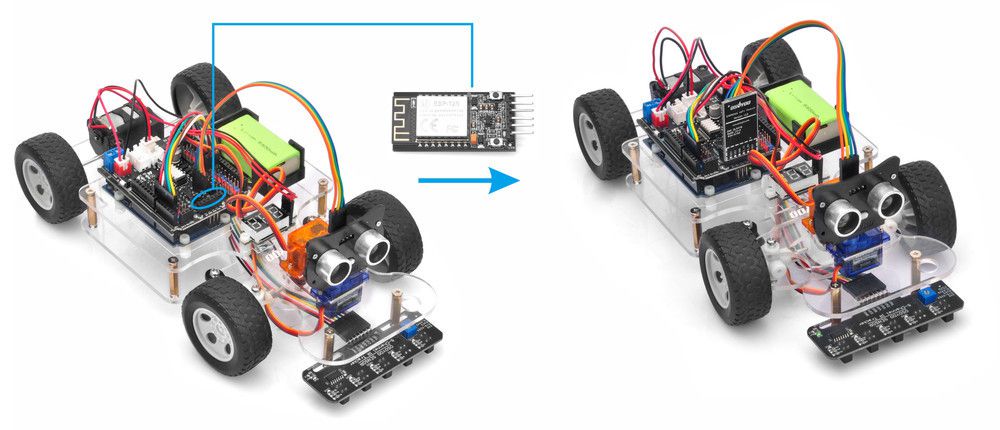
ESP8266 Wi-Fiモジュールはソフトシリアルポートスロットに挿入し、次の図のように<>つのWi-Fiジャンパーキャップを取り付ける必要があります。
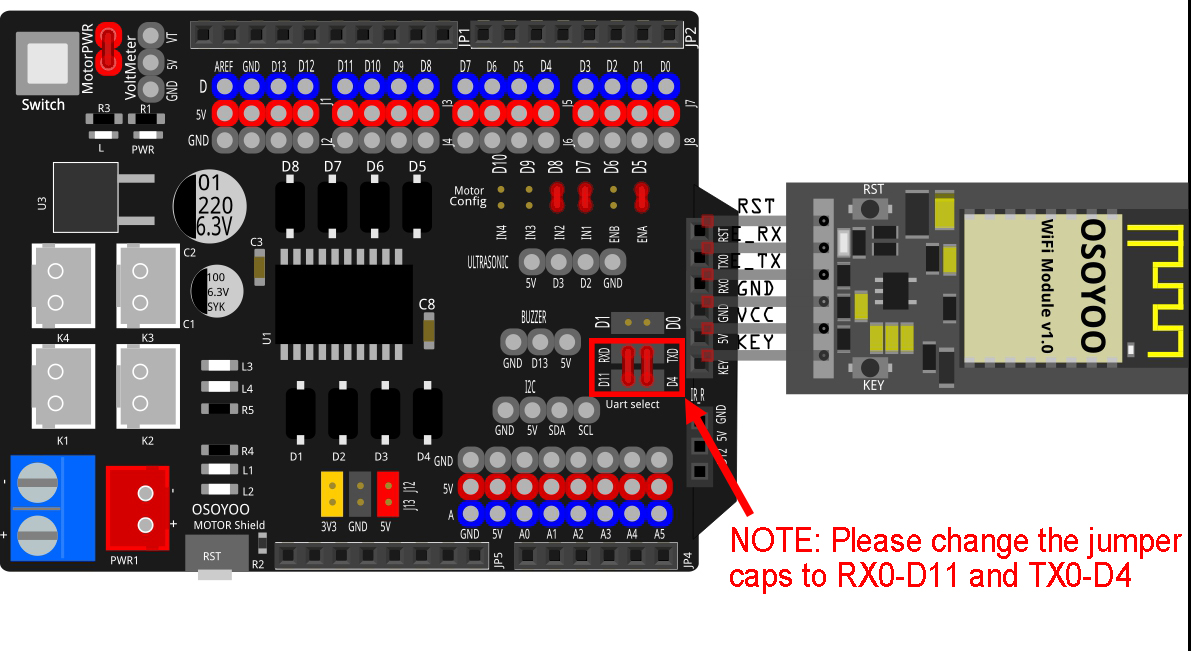
ENB、IN3、IN4のジャンパーを取り外します
| .PART |
モーターシールド |
| IN1ジャンパー |
D7 |
| IN2ジャンパー |
D8 |
| エナジャンパー |
D5 |
| ステアサーボ |
D9 |
| バックモーターケーブル |
K1 または K2 |
| E_TXジャンパー |
D4 |
| E_RXジャンパー |
D11 |
ソフトウェアのインストール
ステップ1)
ダウンロード OSOYOO Wi-Fi UDP ロボットカーコントロールアプリ
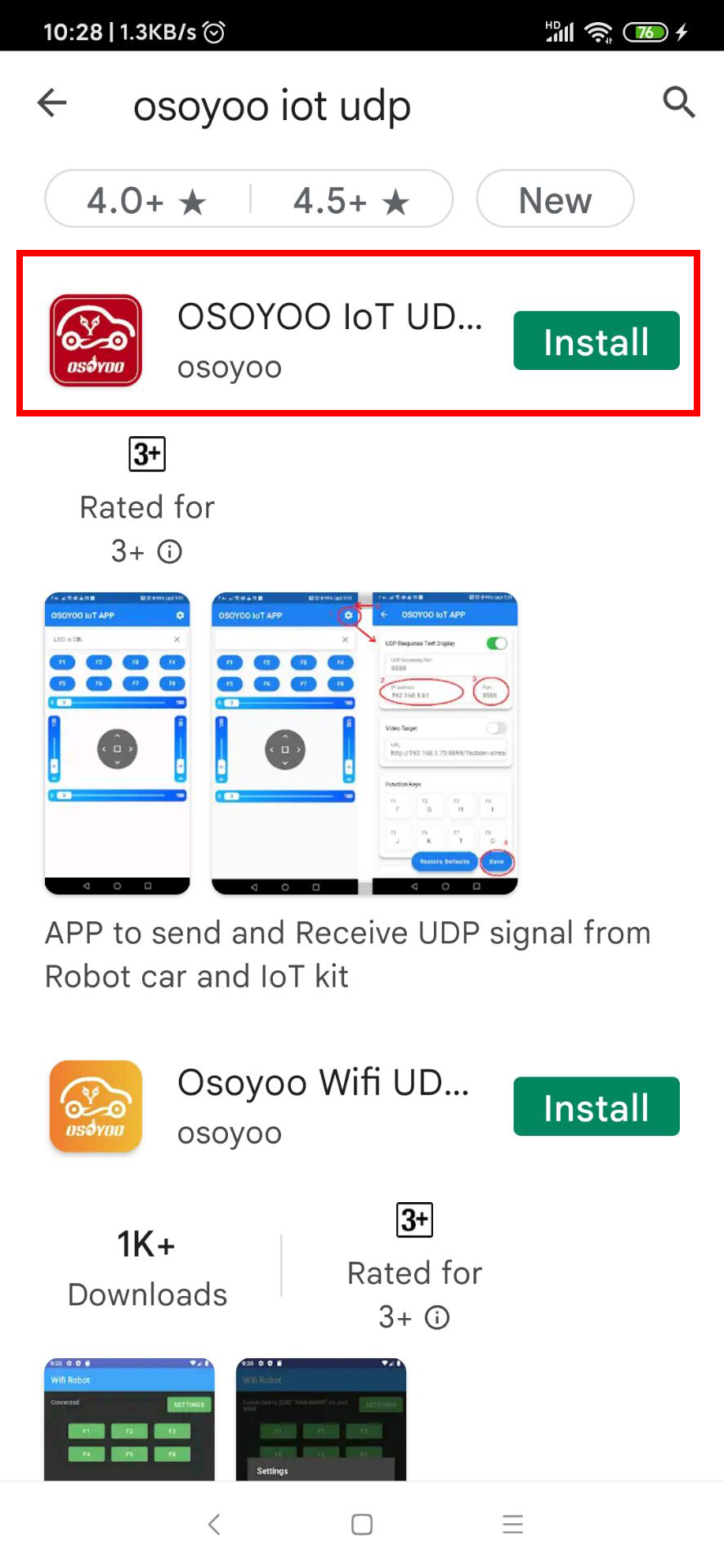
グーグルプレイやアップルストアでは、キーワードを検索してください “OSOYOO IoT UDP ロボットカー, あなたは次のように赤いアイコンAPPを見つけるでしょう (ご注意:Google Playでこのアプリを見つけられない場合、以下のリンクから直接にアプリをダウンロードできます:https://osoyoo.com/driver/udp-app.apk ):
ステップ2)レッスン 90 でライブラリをインストールしていない場合は、https://osoyoo.com/driver/sg2car/PWMServo.zip から PWMServo ライブラリをダウンロードしてください。
また、WifiESPマスターライブラリのzipファイルをダウンロードしてください https://osoyoo.com/driver/WiFiEsp-master.zip
次に、Arduino IDEを開き→[スケッチ]→[ライブラリを含める]→.ZIPライブラリを追加]をクリックしてから、上記の2つのzipファイルをArduino用のOSOYOO基本ボードにロードします。
ステップ3) スケッチコードのインストール:
車は、STAモードとAPモードの<>つのWi-Fiモードで動作できます。これら<>つのモードのスケッチは異なります。これら<>つのモードを<>つずつ説明しましょう
A) STAモード
STAモードでは、ロボットカーがLANルーターのクライアントデバイスになります。LANルーターのSSID名とパスワードをスケッチに保存する必要があります。
スケッチが実行されると、ルーターのDHCPサービスがロボットカーにIPアドレスを割り当て、APPはこのIPアドレスを使用して車にアクセスします。
1)https://osoyoo.com/driver/sg90car/sg90car-lesson5A1.zip からSTAモードのスケッチコードをダウンロードしてください。ファイルを解凍すると、「sg90car-lesson5A1」というフォルダが表示されます。 Arduino IDEを開き→ファイルをクリックして→→開くをクリックしてコードを選択します “sg90car-lesson5A1.ino” 上記のフォルダで、Arduino用のOSOYOOベーシックボードにコードをロードします

2)65,66行目のコードを変更する必要があります
char ssid[] = “***”; // *** をルーターの wifi SSID に置き換えます
char pass[] = “***”; // WiFi パスワードを *** に置き換えます
3)レッスン1のFRONT値として、19行目のデフォルト値90を変更してください。手順1のオプション5を使用してホイールの方向を合わせる場合は、この手順をスキップしてください。
#define FRONT 90 //degree when steering facing straight forward
4) スケッチを OSOYOO Basic Board for Arduino にアップロードします。最後に、Arduino IDEの右上隅にあるシリアルモニターウィンドウをクリックすると、次の結果が表示されます。

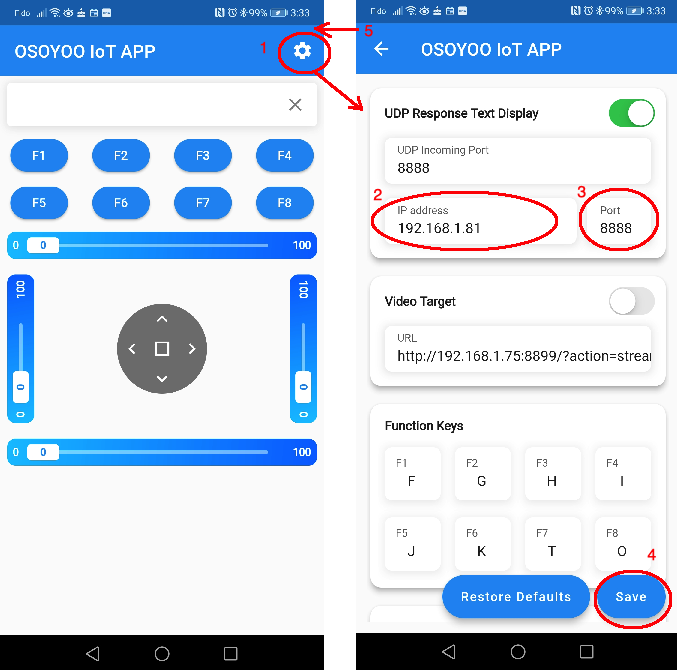
5)このモードでは、ルーターによって割り当てられたLAN IPアドレスであるIPアドレスが表示されます。このIPアドレスを書き留め、[設定]をクリックしてロボットのIPアドレスを設定し、このIPアドレスをAPP設定セクションに設定し、設定のポートを8888に設定してください。
これで、ロボットカーがLANに接続され、同じLANで携帯電話を使用してロボットカーを制御できます。APPがWANにある場合は、ルーターコントロールパネルに移動し、ポート8888をロボットカーのLAN IPアドレスに転送する必要があり、ルーターIPを使用して車を制御できます。この機能により、私たちのロボットカーは真のモノのインターネットデバイスになります
B)APモード
時々私たちは屋外にいて、LANやWi-Fiルーターを持っていません。車を制御するには、APモードを使用する必要があります。
APモードで作業している場合、ロボットカー自体がWi-Fiホットスポットになります。私たちの携帯電話は、Wi-Fiクライアントとしてロボットカーに接続できます。ロボットのIPアドレスは192.168.4.1に固定されており、WANに接続されていません。
1)次のリンクからスケッチをダウンロードしてください:https://osoyoo.com/driver/sg90car/sg90car-lesson5B1.zip。ファイルを解凍すると、「v3car-lesson5B1」というフォルダが表示されます。 Arduino IDEを開き→ファイルをクリックして→開く→コードを選択する上記のフォルダでコード「v3car-lesson5B1.ino」を選択し、コードをArduino用のOSOYOOベーシックボードにロードします
2) Arduinoシリアルモニターを開きます, STAモードと同様の結果が表示されます.IPアドレス192.168.4.1の新しいWi-Fi SSID「osoyoo_robot」がウィンドウに表示されます。これは、ロボットカーのWi-Fiホットスポット名が「osoyoo_robot」であり、そのIPアドレスが192.168.4.1であることを意味します。
3)携帯電話を「osoyoo_robot」Wi-Fi hot_spotに接続し、IPアドレスを「192.168.4.1」に設定し、ポートを8888に設定してAPP設定セクションに設定します
これで、ロボットカーがWi-Fiホットスポットになり、携帯電話を使用してロボットカーを制御できます。
最終テスト
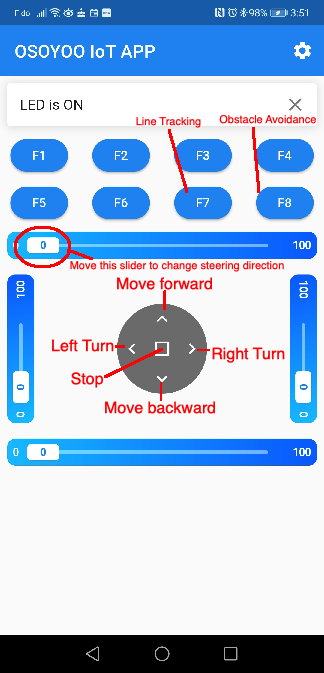
車の電源を入れます。次に、[設定]をクリックしてロボットのIPアドレスを設定します。
A) STAモードでは、携帯電話をロボットカーの同じLAN SSIDに接続し、Arduinoシリアルモニターに表示されるロボットIPと同じIPアドレスを設定する必要があります。
B)APモードでは、携帯電話に連絡してWi-Fi hot_spotを「osoyoo_robot」し、IPアドレスを192.168.4.1に設定する必要があります
◄ボタンをクリックして左折(ハンドルを反時計回りに回転)、►ボタンをクリックして右折(ハンドルを時計回りに回転)すると、これら2つのボタンを押し続けると、より鋭い角度で回転します。
▲ボタンは車を前進させ、▼キーを押すと車を後方に動かします。