ユーザーマニュアルは次の場所からダウンロードできます。
注:ARDUINO用のすべてのOSOYOO製品は、ARDUINOと完全に互換性のあるサードパーティボードです。
認定オンライン小売業者:
| アメリカから購入 |
英国から購入 |
DEから購入 |
IT部門から購入 |
フランスから購入 |
ESから購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
目的
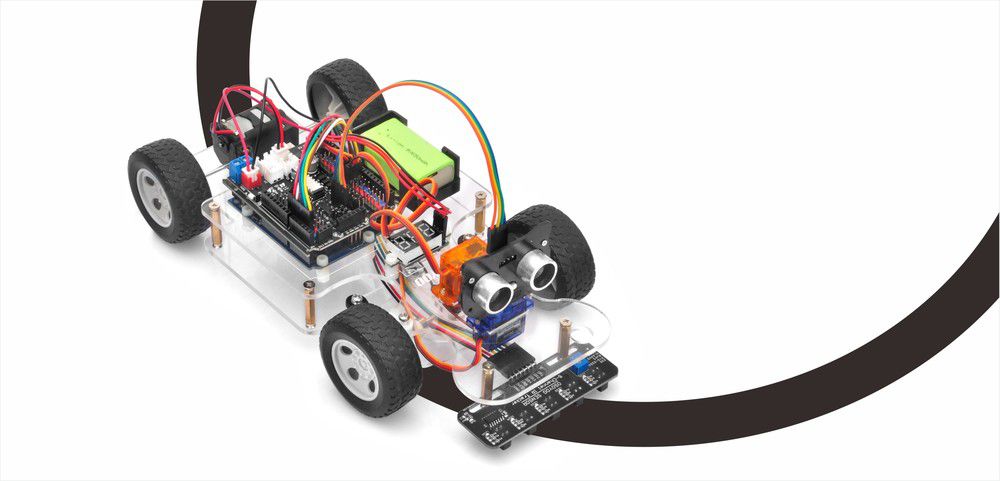
このチュートリアルでは、5ライントラッキングセンサーを使用して、Arduino用OSOYOOスポーツカーが白い地面の黒いトラックラインに沿って自動的に移動するようにガイドします。このレッスンのソフトウェアは、トラッキングセンサーからデータを読み取り、白い地面の黒い線路に沿って移動するように車を自動的にガイドします。
OSOYOO 5チャンネルIRトラッカーセンサーは、デジタルビットとして構成および読み取られる5つのIRセンサーのアレイです。多くの複雑な環境に適応でき、ユーザーは実際の状況に応じてオンボード感度ポテンショメータを調整して、曲線トラックの角度の変化を検出するトリガーしきい値を変更できます。オンボードでは、5チャンネルの赤外線追跡プローブが中央のトラックラインを同時に検出し、左右の端を検出できます。ネジと銅またはリベットを使用してスマートカーに取り付け、高精度の追跡を完了できます。
センサーの詳細については、次のリンクを参照してください。
オソヨー 5チャンネルIRトラッカーセンサー
車のフレームを完成させない場合は、レッスン1を確認してください

ソフトウェアのインストール
ステップ1:https://osoyoo.com/driver/sg90car/PWMServo.zip からPWMServoライブラリをダウンロードし、Arduino IDEにインポートしてください。レッスン 2 を完了している場合は、この手順をスキップしてください。
ステップ2:レッスン3のサンプルコードをダウンロードし、ダウンロードしたzipファイルを解凍します sg90car-lesson3.zip、sg90car-lesson3というフォルダが表示されます。
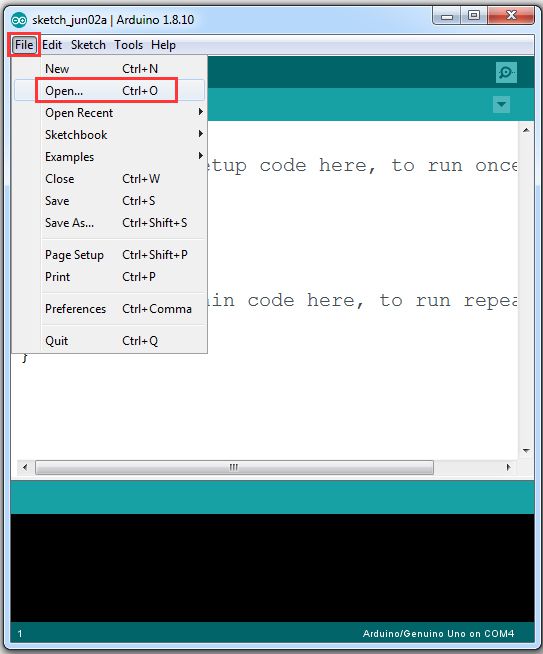
ステップ 3: UNO R3ボードをUSBケーブルでPCに接続し、Arduino ID→Eを開き、ファイルをクリックして→開く→クリックします コードを選択してください “sg90car-lesson3.ino” sg90car-lesson3フォルダで, Arduino用のOSOYOOベーシックボードにコードをロードします.
注意: スケッチコードをArduino用OSOYOOベーシックボードにアップロードするときは、バッテリーを切るか、電源アダプターを抜いてください。
ステップ4:90 行目のデフォルト値 22 をレッスン 1 の FRONT 値に変更してください。レッスン1のステップ5のオプション1として手動でホイールの方向を合わせる場合は、この手順をスキップしてください。
#define FRONT 90 // steering to front
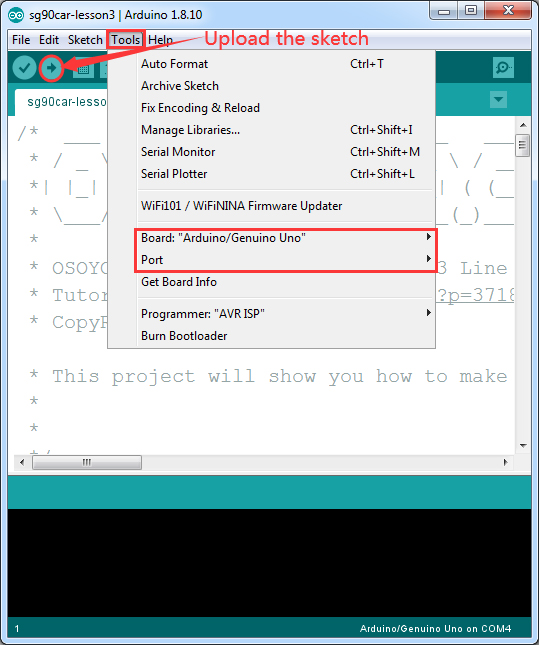
ステップ5:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
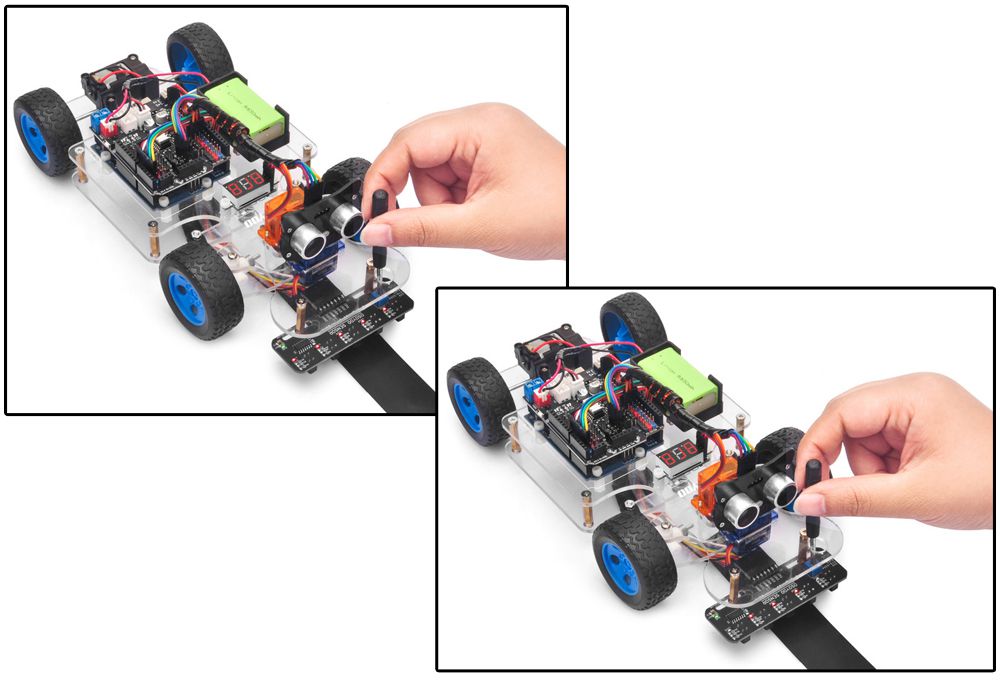
ステップ6:トラッキングセンサーモジュールの感度を調整します。
最高の感度ステータスが得られるまで、車の電源を入れて保持し、クロスドライバーでトラッキングセンサーのポテンショメータを調整します:センサーが白い地面より上にあると信号LEDライトが消灯し、センサーが黒いトラックより上にあると信号LEDが点灯します
最終テスト
1.白い地面に黒いトラック(黒いトラックの幅は20 mm以上30 mm未満)を準備します。トラックの曲げ角度は30度を超えることはできません。角度が大きすぎると、車はトラックから外れます。
2. Arduino用OSOYOOベーシックボードをPCから外し、OSOYOOモーターシールドV1.1の電源スイッチがオフになっていることを確認してから、9Vバッテリーをバッテリーボックスに入れます。
(注:極方向が正しいことを確認してください、そうしないとデバイスが破壊され、火災の危険を引き起こす可能性があります)。
3.車をトラックに置き、OSOYOOモーターシールドV1.1のスイッチをオンにすると、車は黒いトラックに沿って移動します。
注:上記の結果のように車が動かない場合は、トラッキングセンサーの配線接続、バッテリー容量を確認する必要がありますtage(7.2v以上である必要があります)。
4.右または左の天使を変更する場合は、コードの23行目から26行目を編集して、スケッチを再度アップロードしてください。 (注:天使は35を超えて設定することはできません)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5.車の速度を変更する場合は、スケッチの次のコードを修正してください(注:最大値は255です)
#define SPEED 90
#define FAST_SPEED 120
#define MID_SPEED 100