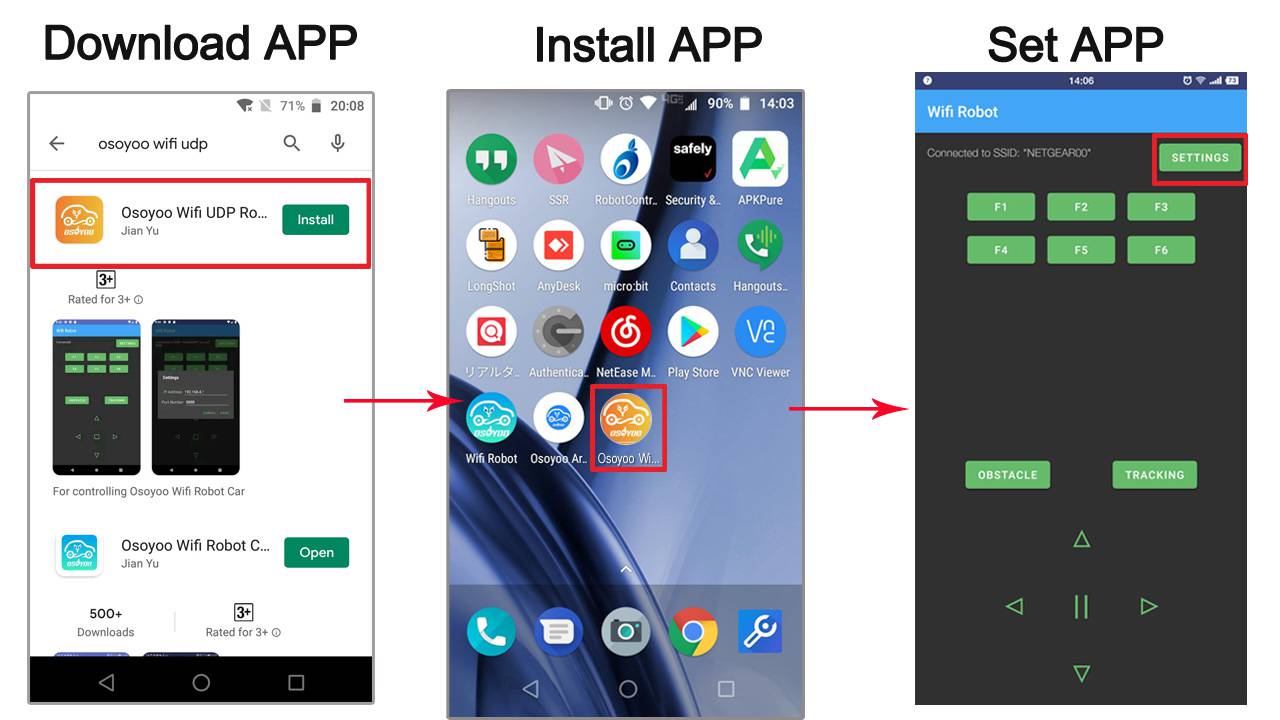
Google Play または Apple Storeで“Osoyoo WIFI UDP Robot APP”を検索してください。(Google Playでこのアプリを見つけられない場合、以下のリンクから直接にアプリをダウンロードできます:https://osoyoo.com/driver/udp-app.apk)
Step 1) OSOYOO WIFI UDP Robot Car control APPをダウンロードします。
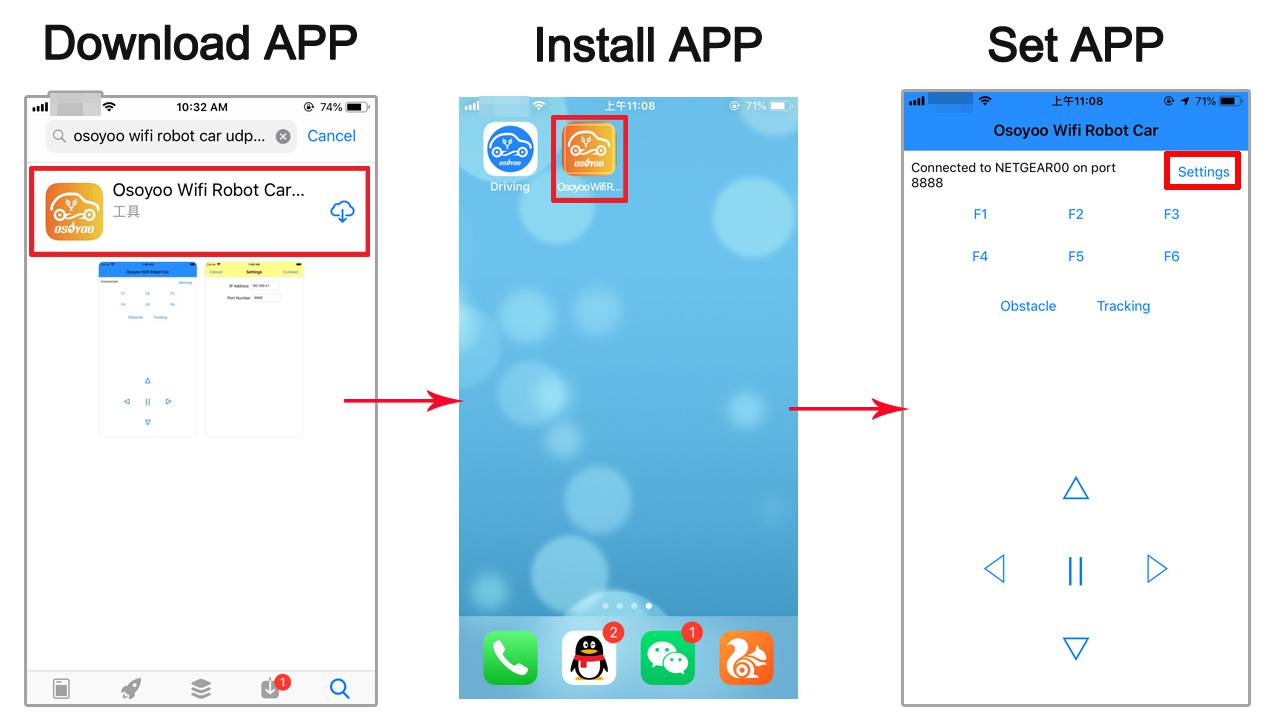
Google PlayまたはApple Storeで “OSOYOO WIFI UDP Robot Car “と検索してください(ご注意:Google Playでこのアプリを見つけられない場合、以下のリンクから直接にアプリをダウンロードできます:https://osoyoo.com/driver/udp-app.apk):
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()