


I.目的
II.部品と装置
III.ハードウェアのインストール
IV.回路接続
V.ソフトウェアのインストール
VI.遊び方

メカナムホイールロボットカー完全セット
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
上記のロボットカーはArduinoで制御しています。 ラズベリーパイボードがあれば、実はロボットカーもラズベリーパイで制御できます。 次のリンクにアクセスして、raspberry pi を使用した基本的な動きを学習できます。
リンク – https://osoyoo.com/?p=31428

このレッスンでは、このレッスンを続行する前に、レッスン 1 を完了する必要があります。 超音波モジュールを使用して障害物を「見て」距離を測定します。 距離が事前に定義されたしきい値未満の場合、ブザーが鳴り、車は障害物から自動的に方向転換します。

OSOYOO Mecanum Wheels ロボットカーシャーシ x 1 (2xleft-wheels/2xright-wheels and Motor x 4)
Arduinoと完全互換のOSOYOO Mega2560ボード x 1
OSOYOO WiFiシールド×1
OSOYOO モデル Y モータードライバー x 1
OSOYOO MG90サーボモーター×1
OSOYOO 超音波センサーモジュール x1
OSOYOO 超音波マウントホルダー
OSOYOO バッテリーボックス×1
OSOYOO 3pin メス – メス ジャンパー線 x1
OSOYOO 6pin オス-メス ジャンパー線 x2
OSOYOO 2 ピン XH.25 メス – メス x1
OSOYOO 10 ピン ジャンパー線 オス – メス x1
18650電池(3.7V)×2

このレッスンを続行する前に、レッスン 1 (車の組み立て) を完了する必要があります。このレッスン 3 では、mg90 サーボ モーターを、レッスン 1 で作成したロボット カーに追加します。
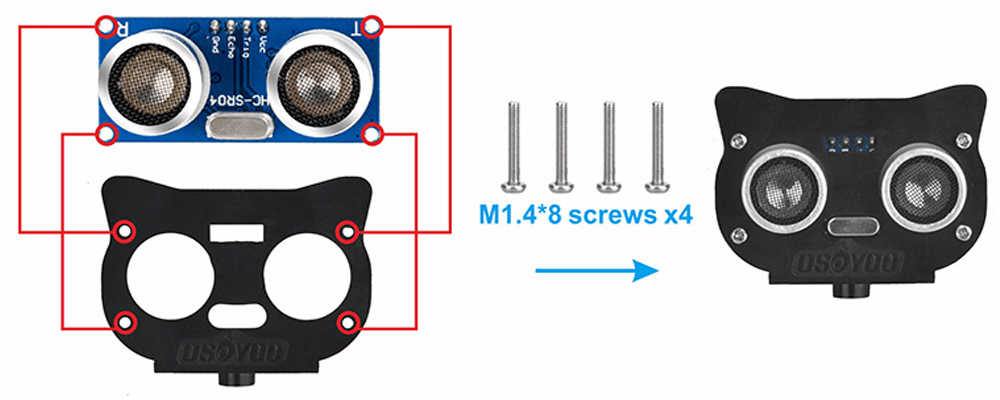
ステップ1: 4個のM1.4*8ネジとM1.4ナットで超音波モジュールをマウントホルダーに取り付けます。
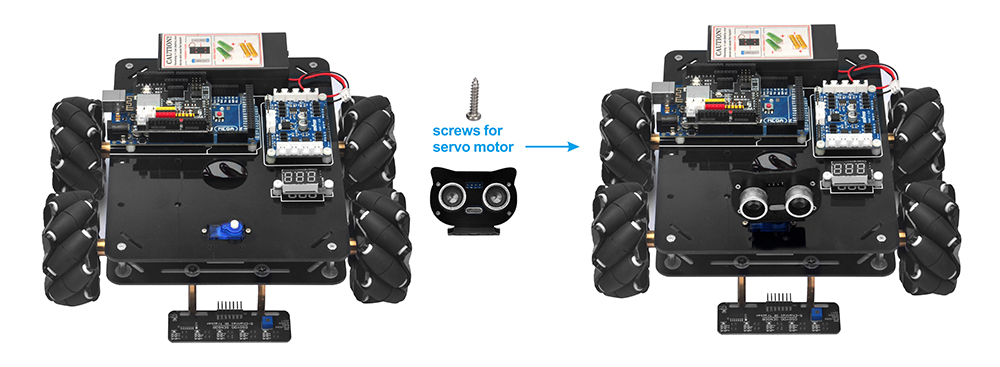
ステップ2:M2 * 4自己タッピングねじを使用して、超音波モジュール用のマウントホルダーをサーボモーターに取り付けてください。
超音波を下に置く場合、自己タッピングねじは簡単にストリップされるため、A.下部からモーターを支持してください。自己タッピングねじは簡単にストリップされます。B.整列プロセスの後にねじを挿入しないでください。

レッスン1(車の組み立て)の回路接続を完了する必要があります。何も変更する必要はありません。ハードウェアのワイヤー接続をそのままにしてください。
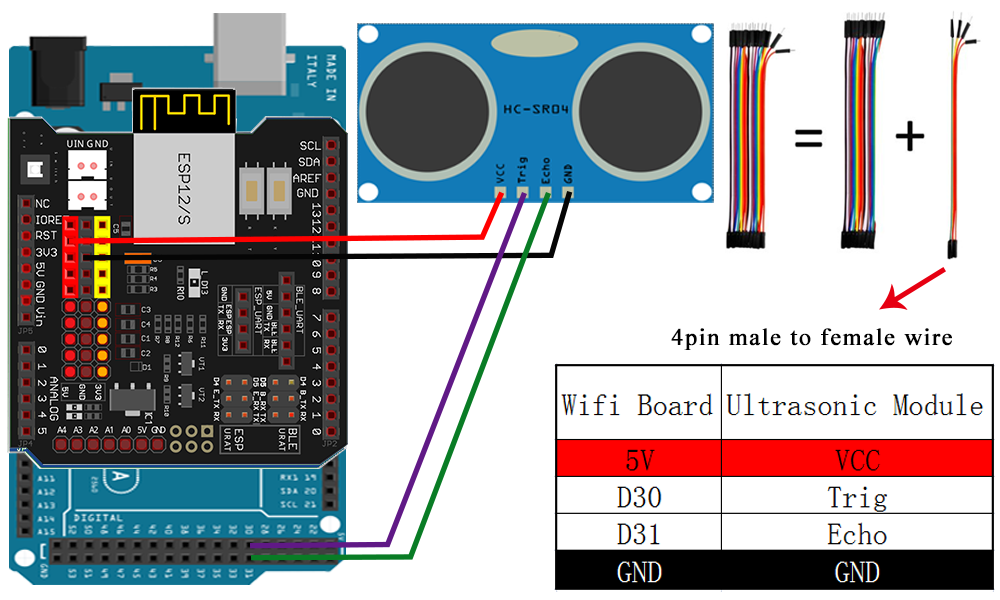
ステップ4:超音波モジュールのVCC、Trig、Echo、GNDを、男性から女性への4本のジャンパーワイヤーを使用して、wifiシールドの5V、D30、D31、GNDに接続します。
(注:10本のジャンパーワイヤーバンドルから男性から女性への4本のジャンパーワイヤーを分割する必要があります。バンドルからの任意の色が構いません。残りのワイヤーは、潜在的に破損したり損傷したりしたワイヤーの予備部品として使用します。)

ステップ1:最新のArduino IDEをインストールします(Arduino IDEバージョン1.1.16以降を既に持っている場合は、このステップをスキップしてください)。Arduino IDEはかhttps://www.arduino.cc/en/Main/Software?setlang=en らダウンロードしてください。
ステップ2:https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson2.zip をダウンロードし、ダウンロードしたzipファイルを解凍すると、m2-lesson2というフォルダが表示されます。
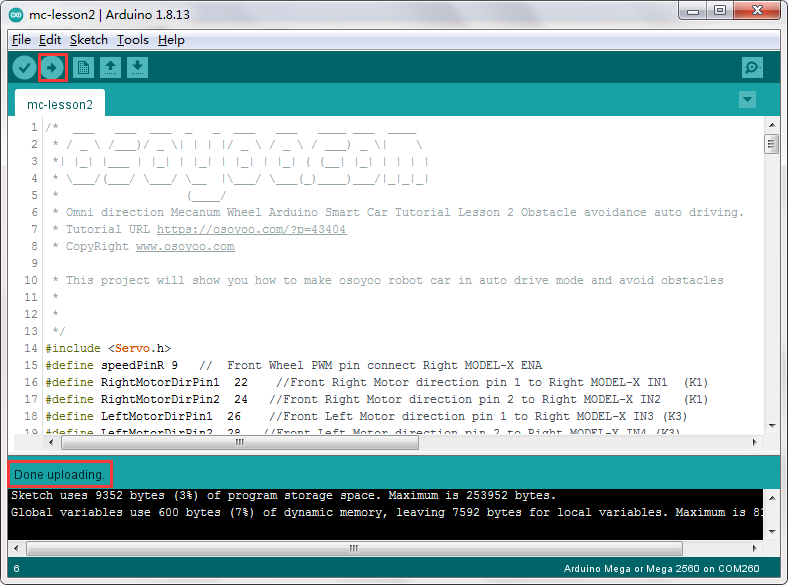
ステップ3:Mega2560ボードをUSBケーブルでPCに接続し、Arduino IDEを開き、ファイルをクリックしてから開くをクリックし、レッスンフォルダ内のコード「m2-lesson2」を選択して、以下のようにArduinoにコードをロードします。

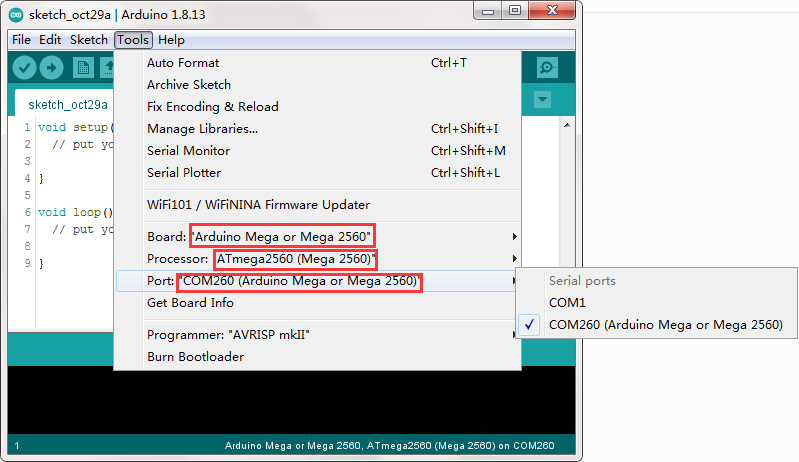
ステップ4:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードしてください。
ステップ 5: 超音波センサーサーボの初期方向調整
バッテリーをオンにすると、サーボがいくつかの動きを行い、最終的に5秒間方向を保持します。
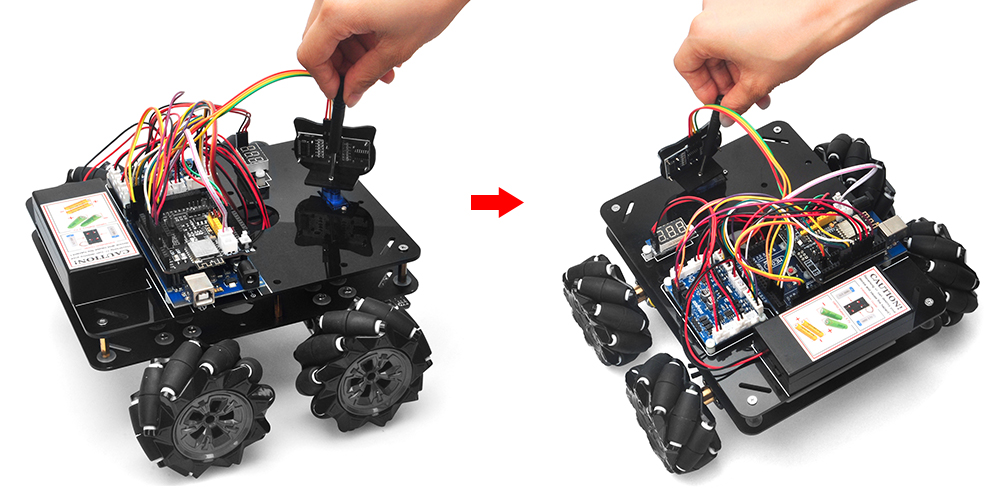
最初の5秒間、超音波センサー(2つの目)がまっすぐ前方を向いていることを確認する必要があります。
もしまっすぐ前方を向いていない場合は、すぐにバッテリーの電源を切り、センサーをサーボから取り外し、再度インストールし、下の写真のようにまっすぐ前方を向くようにします。そうしないと、障害物回避プログラムが正しく動作しなくなります。センサーの方向を調整したら、再度バッテリーをオンにします。
方向がまっすぐ前方を向いていない場合は、バッテリーの電源を切り、方向調整をやり直してください。

もし超音波モジュールが正面に向かっている場合、センサーの位置を調整する必要はありません。5秒間待ってください。障害物が検出されない場合、車は前進します。障害物が検出されると、車は停止し、超音波モジュールは右から左に回転して周囲の障害物を検出します。ロボットカーは、障害物センサーデータと障害物回避アルゴリズムに基づいて左折、右折、または後退することを決定します。
時々、車両が衝突して超音波センサーの位置が変わる場合がありますので、超音波センサーの方向調整を再度行う必要があります。
ロボットカーは、障害物センサーデータと障害物回避アルゴリズムに従って、左折、右折、または後退を決定します。時には車が衝突し、超音波センサーの位置が変わることがあります。その場合は、再びセンサーの方向調整を行う必要があります。











