I.目的 II.部品とデバイス III.ハードウェアインストール IV.ソフトウェアインストール サンプルプロジェクト VI.遊び方
アメリカで購入
イギリスで購入
ドイツで購入
イタリアで購入
フランスで購入
スペインで購入
ここでご購入を!
VIDEO
Model 2021006600
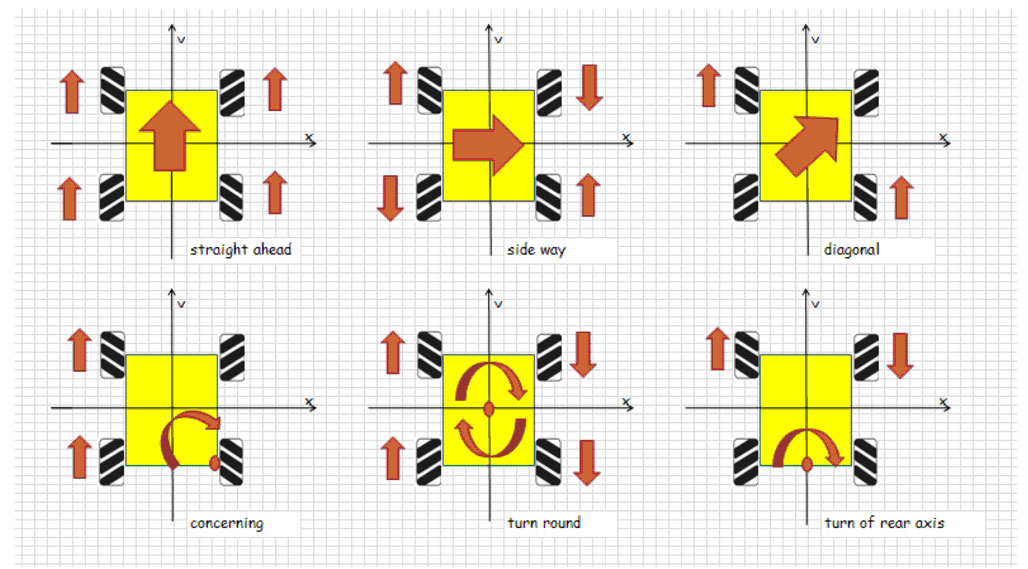
このプロジェクトでは、Raspberry Piを使用してOSOYOOメカナムホイールロボットカーを制御し、前進、後退、左折、右折、左平行移動、右平行移動などの基本的な動きを行う方法を紹介します。
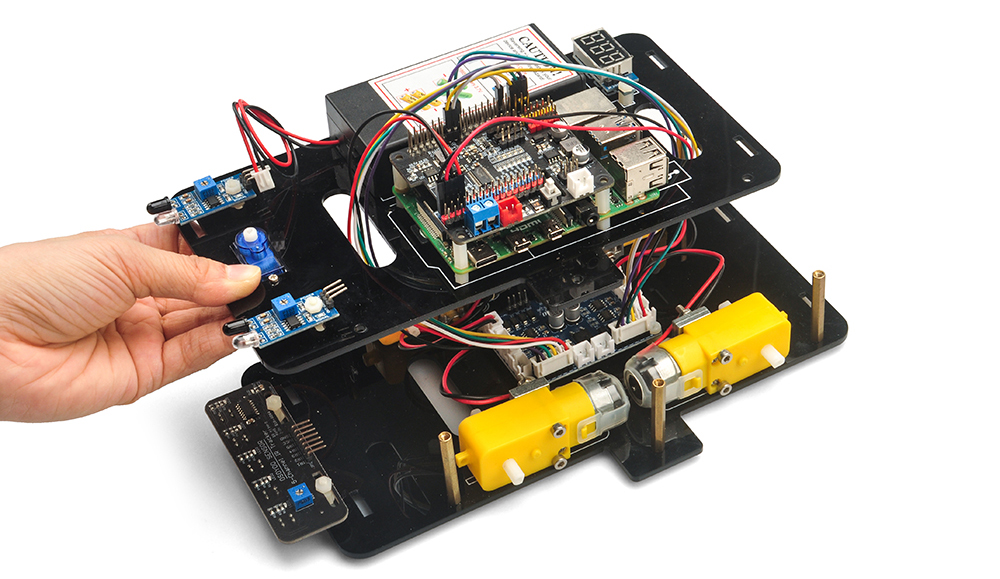
このレッスンでは、カーシャーシの組み立てと、Raspberry PiとOSOYOO PWM HATをOSOYOO Model Yボードに接続する方法についても説明します。このセットアップは、以下のレッスンの基礎となります。
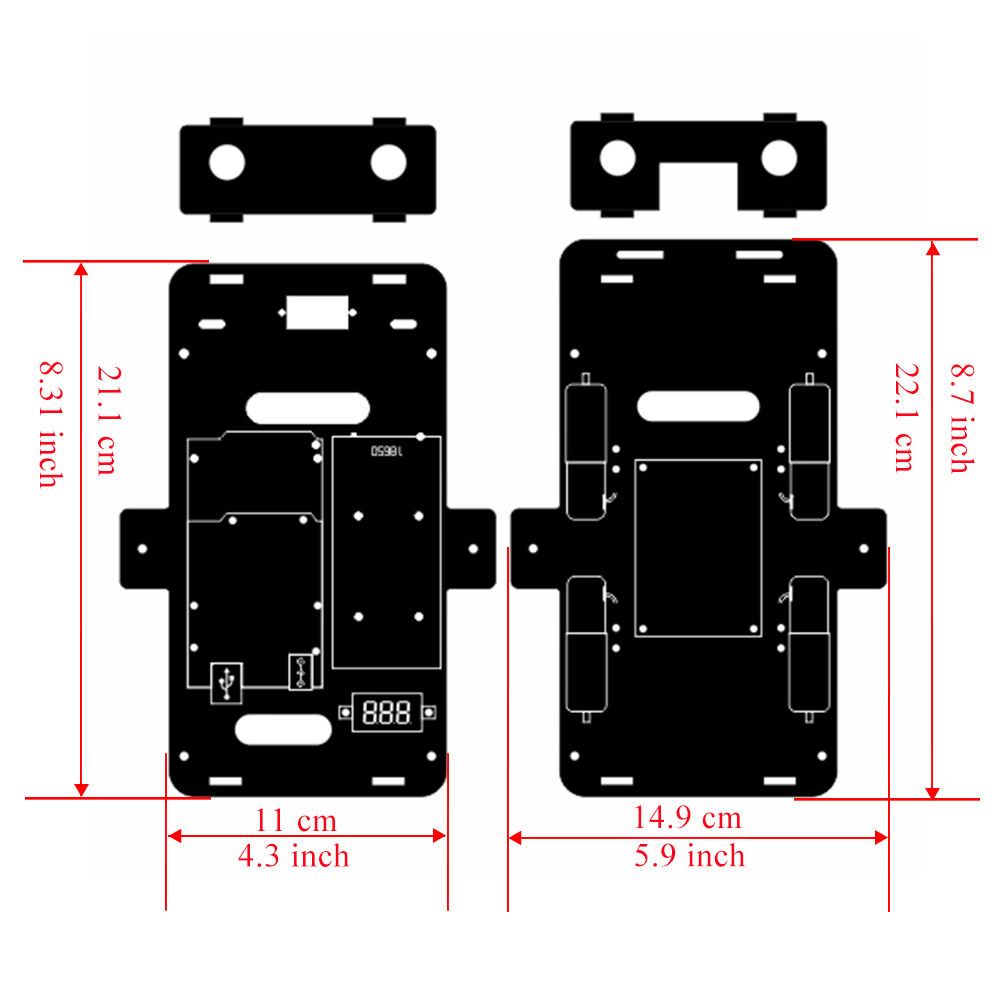
OSOYOOメカナムホイールロボットカーシャーシ x1
寸法
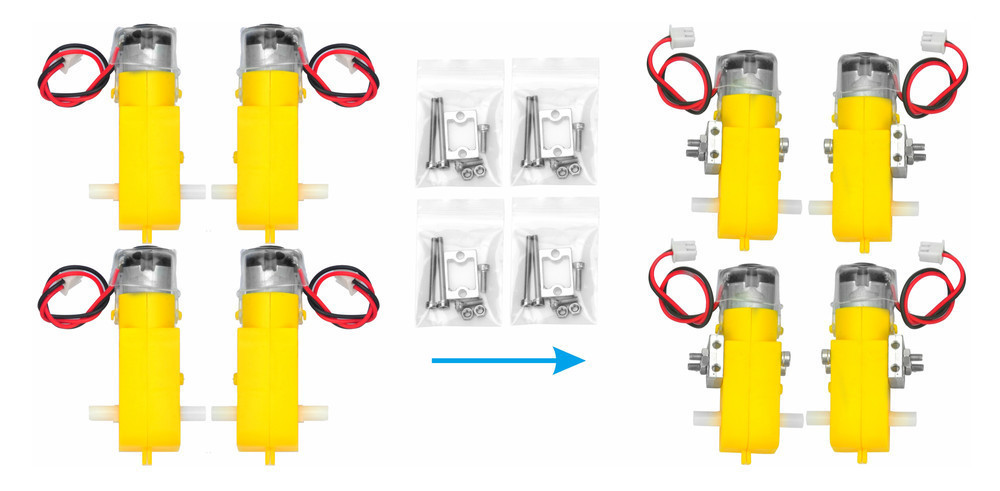
1)図に示すように、金属製モーターホルダーを使用して4つのモーターを取り付けます。(金属製モーターホルダーを取り付ける前に、モーターの向きが正しいことを確認してください。)
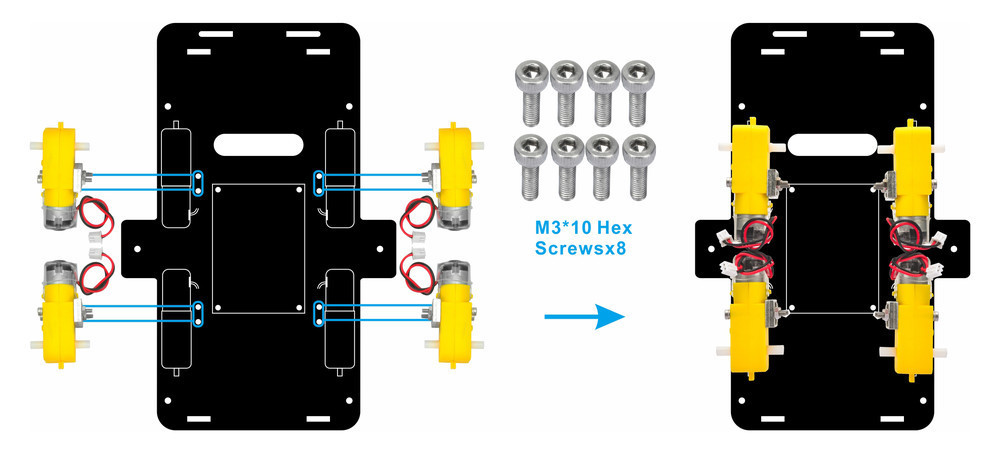
2)図に示すように、M3*10六角ネジと六角ドライバーを使用して、4つのモーターを下部カーシャーシに固定します。(この手順に必要なネジは、金属製モーターホルダーパッケージに含まれています。)
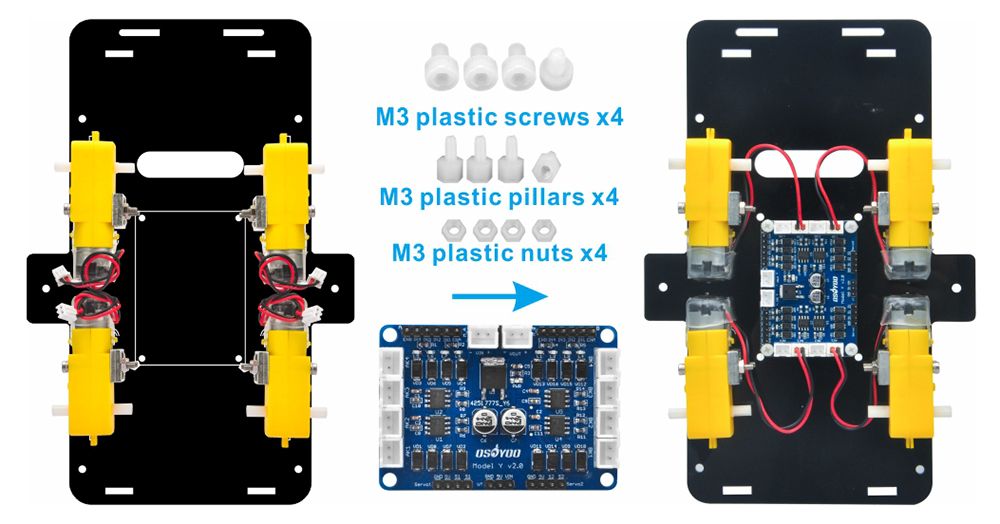
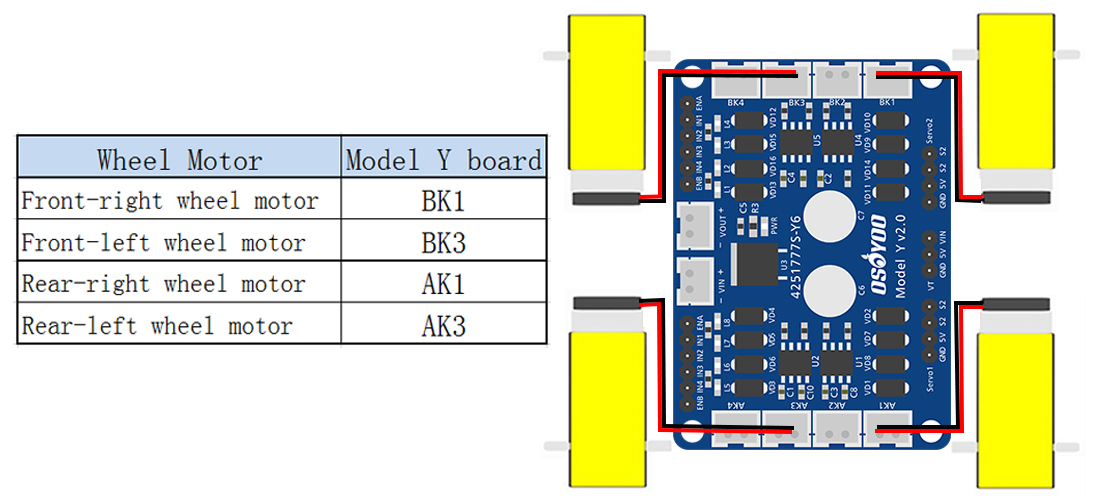
3)4つのM3プラスチックネジ、プラスチック支柱、プラスチックナットを使用して、OSOYOO Model Yドライバーボードを下部カーシャーシに取り付けます(プラスチック支柱はオス端を下向きにして取り付けることをお勧めします。 )。次に、図に示すように、4つのモーターをModel YモータードライバーボードのK1およびK3ソケットに接続します。
プラスチック支柱には2つの取り付けモードがあります: A. プラスチック支柱のオス端が下向き。 B. プラスチック支柱のオス端が上向き。
4)図に示すように、4つのモーターをModel YモータードライバーボードのK1およびK3ソケットに接続します。
Model Y V2.0 Hブリッジ4チャンネルモータードライバーについて:
https://osoyoo.com/ja/?p=46344
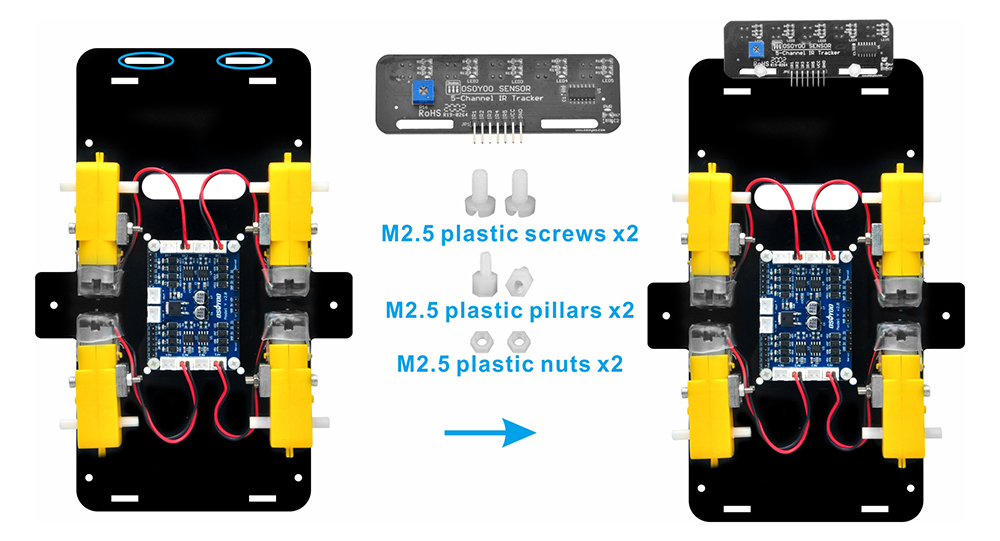
5)2つのM3プラスチックネジ、2つのM3プラスチック支柱、2つのM3プラスチックナットを使用して、トラッキングセンサーモジュールを下部シャーシに取り付けます(プラスチック支柱はオス端を上向きにして取り付けることをお勧めします ) 。センサーがしっかりと固定され、正確な機能のために適切に位置合わせされていることを確認してください。
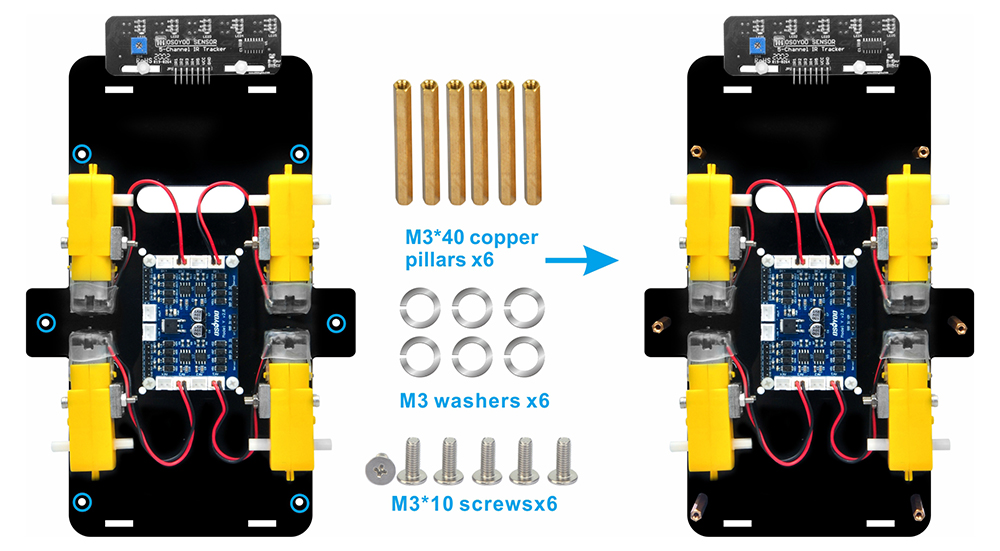
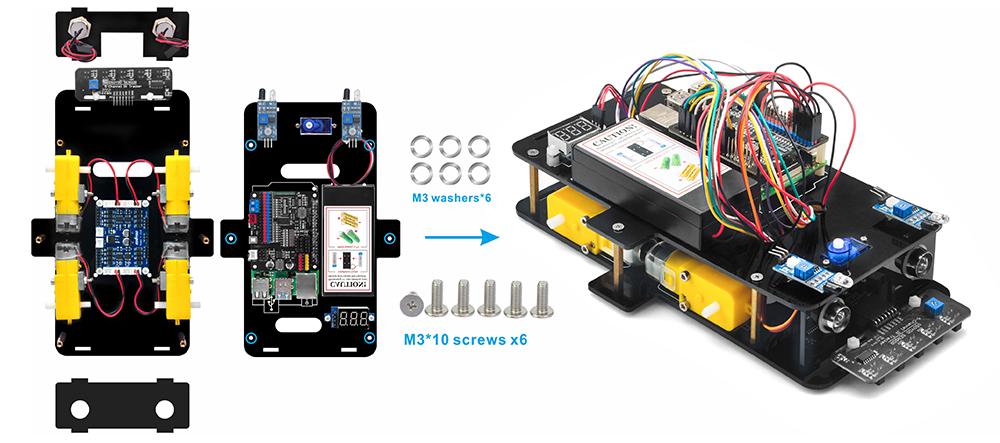
6)6つのM3*10ネジと6つのM3ワッシャーを使用して、6つのM3*40銅支柱を下部シャーシに取り付けます。上部シャーシに安定したサポートを提供するために、支柱がしっかりと固定されていることを確認してください。
ワッシャーをネジに通してください。ワッシャーはネジの圧力を分散し、金属支柱にネジを固定する際の安定性を向上させます。
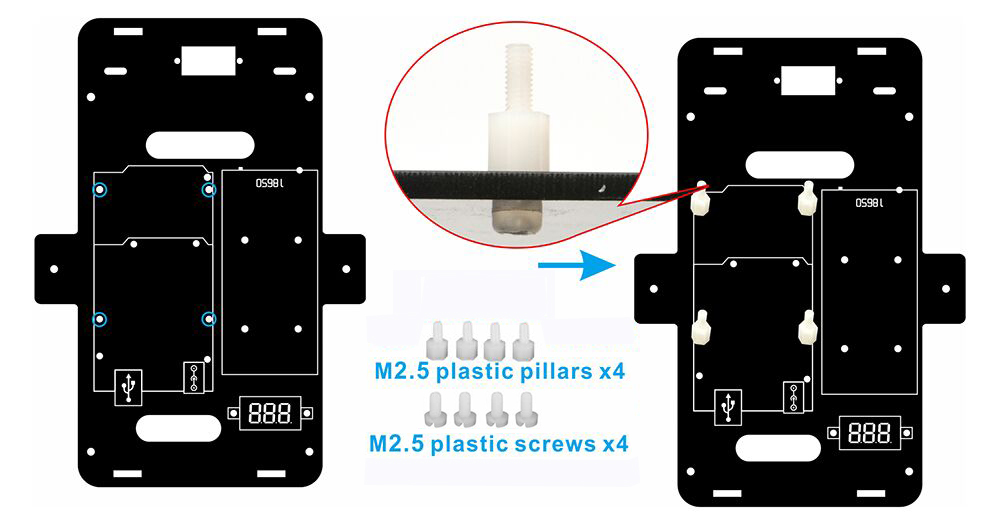
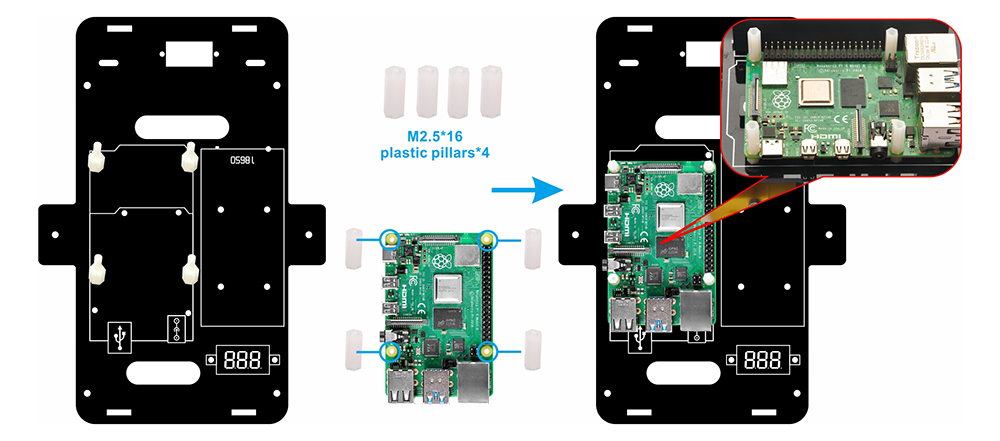
7)アクリルシャーシには、Raspberry Piボードを取り付けるための専用の取り付け穴があります。下図に示すように、これらの4つの穴に白いプラスチックM2.5*5+6スタンドオフとM2.5*5ネジを取り付けてください。
8)4つのM2.5×16プラスチック支柱を使用して、raspberry pi 4ボード(パッケージには含まれていません)を上部シャーシに固定します。
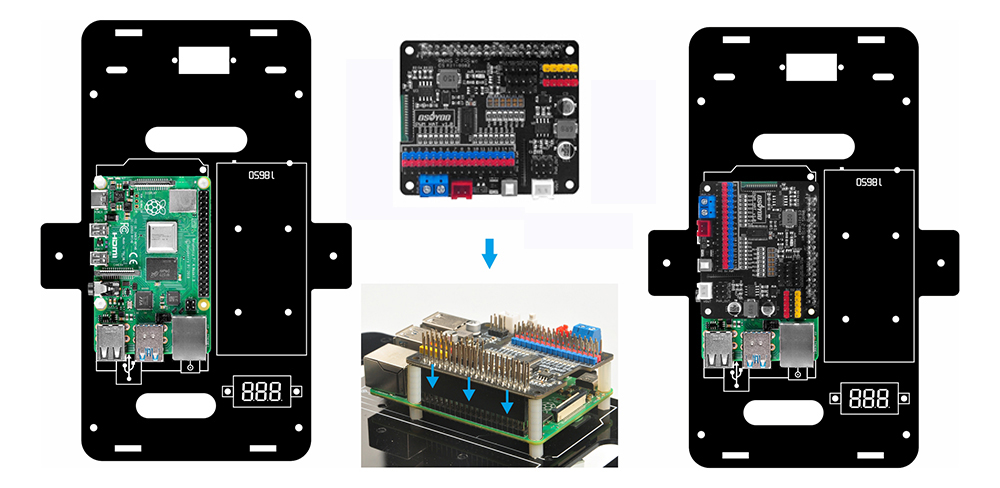
9)OSOYOO PWM HATシールドをraspberry piボードに挿入します。
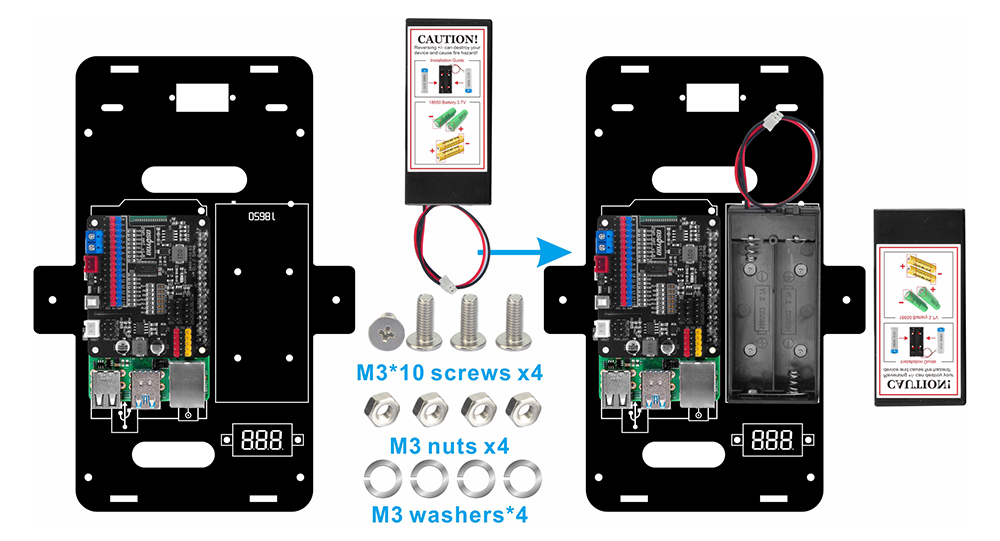
10)4つのM3*10ネジ、4つのM3ナット、4つのM3ワッシャーを使用して、バッテリーボックスを上部シャーシの指定されたマーキングに取り付けます。
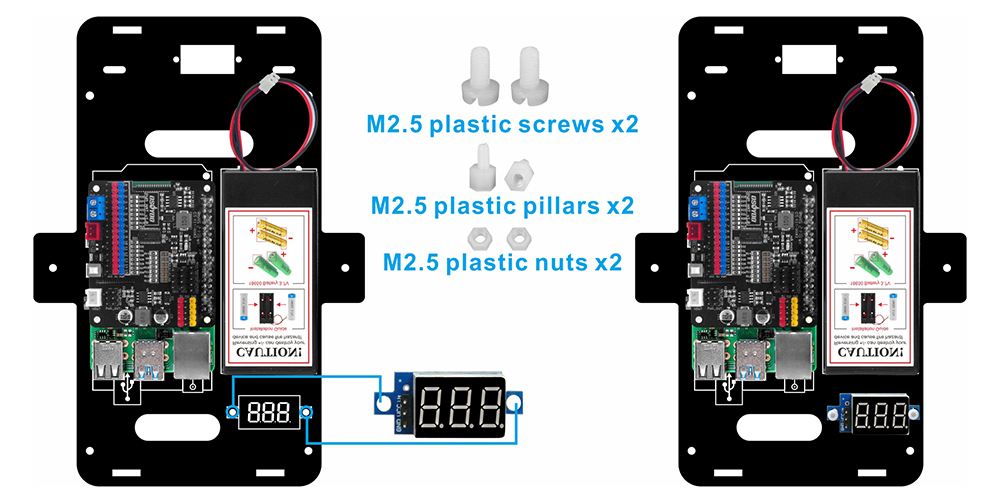
11)2つのM2.5プラスチックネジ、2つのM2.5プラスチック支柱、2つのM2.5プラスチックナットを使用して、電圧計を下部シャーシの指定されたマーキングに取り付けます。(プラスチック支柱はオス端を上向きにして取り付けることをお勧めします。 )
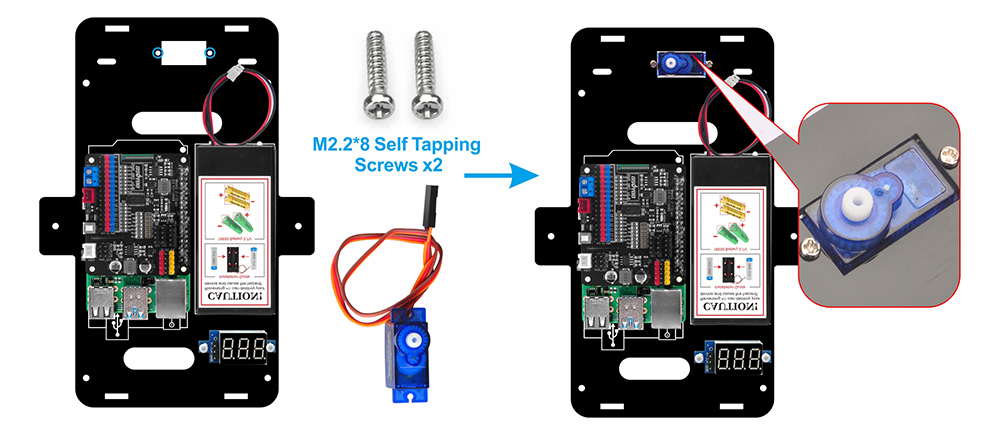
12)2つのM2.2*8タッピングネジを使用して、SG90サーボモーターを上部シャーシの前面に取り付けます。
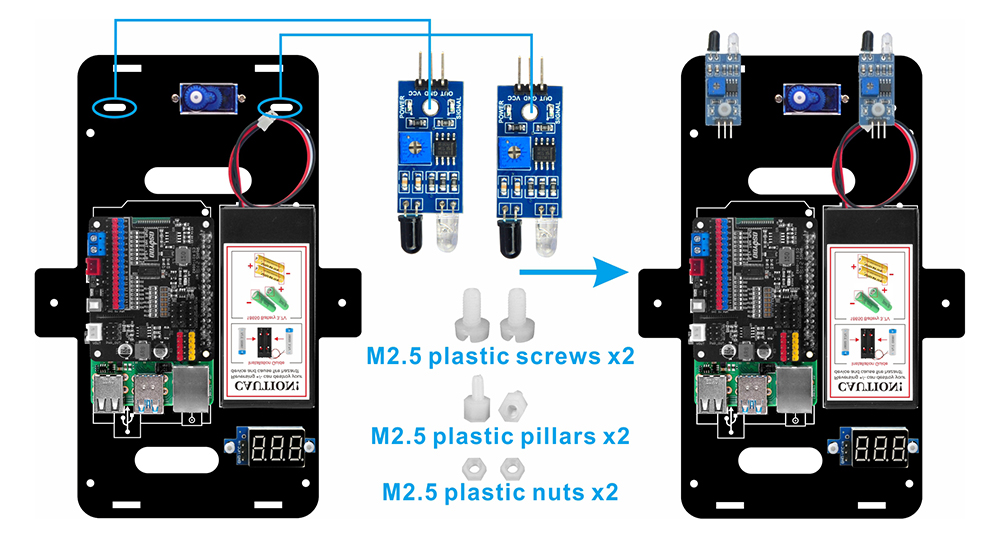
13)2つのM2.5プラスチックネジ、M2.5プラスチック支柱、M2.5プラスチックナットを使用して、2つのIR距離センサーを上部シャーシの前面に取り付けます。センサーをしっかりと固定するために、プラスチック支柱はオス端を上向きにして取り付けることをお勧めします。
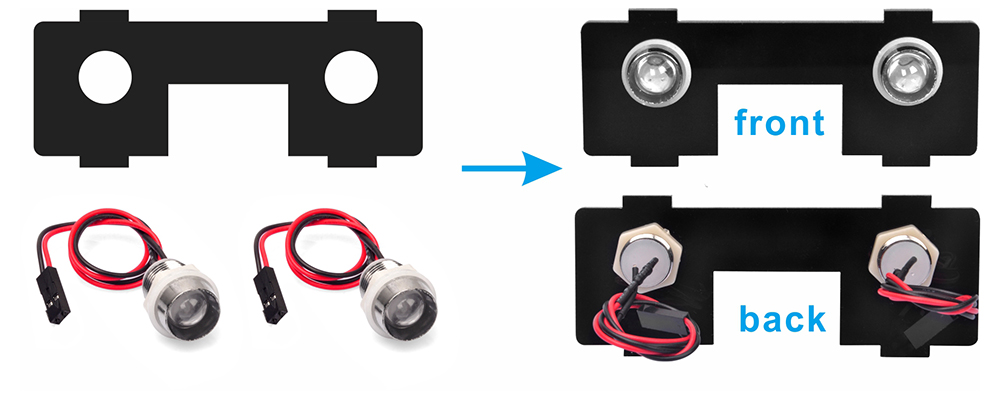
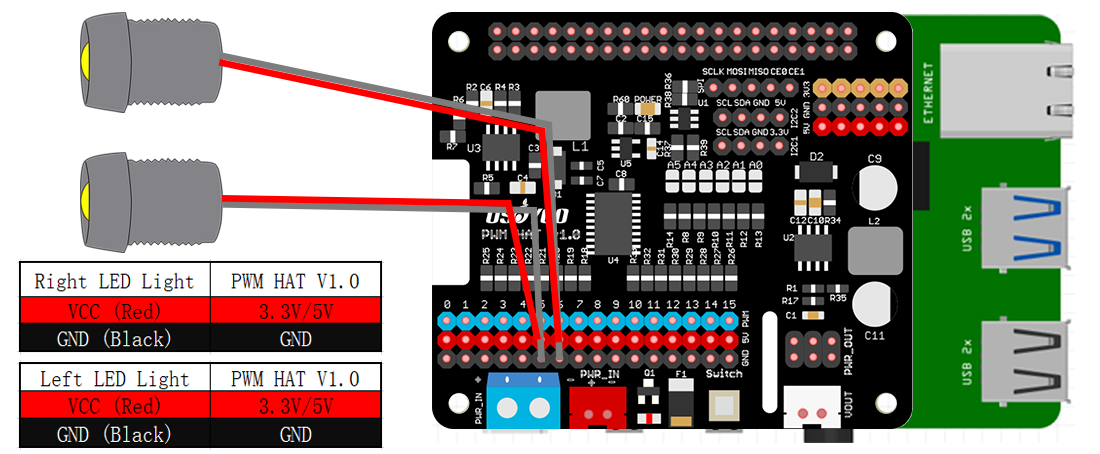
14)図に示すように、2つのLEDライトを前面バリアプレートに取り付けます。
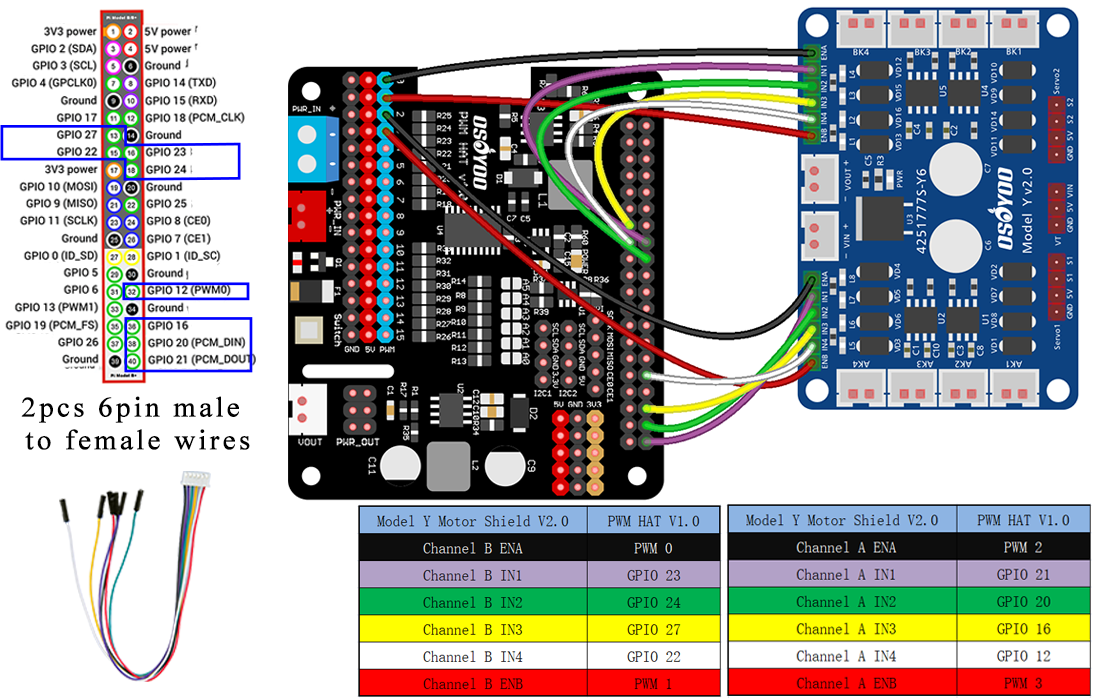
15)以下のように、2本の6ピンメス-メスジャンパーワイヤーを使用して、OSOYOO model YボードをOSOYOO PWM hatシールドに接続します。エリアBの6ピンワイヤーはSG90サーボ近くの穴を通す必要があり、エリアAのもう一方の6ピンワイヤーは電圧計近くの穴を通す必要があります。
注意:
16)
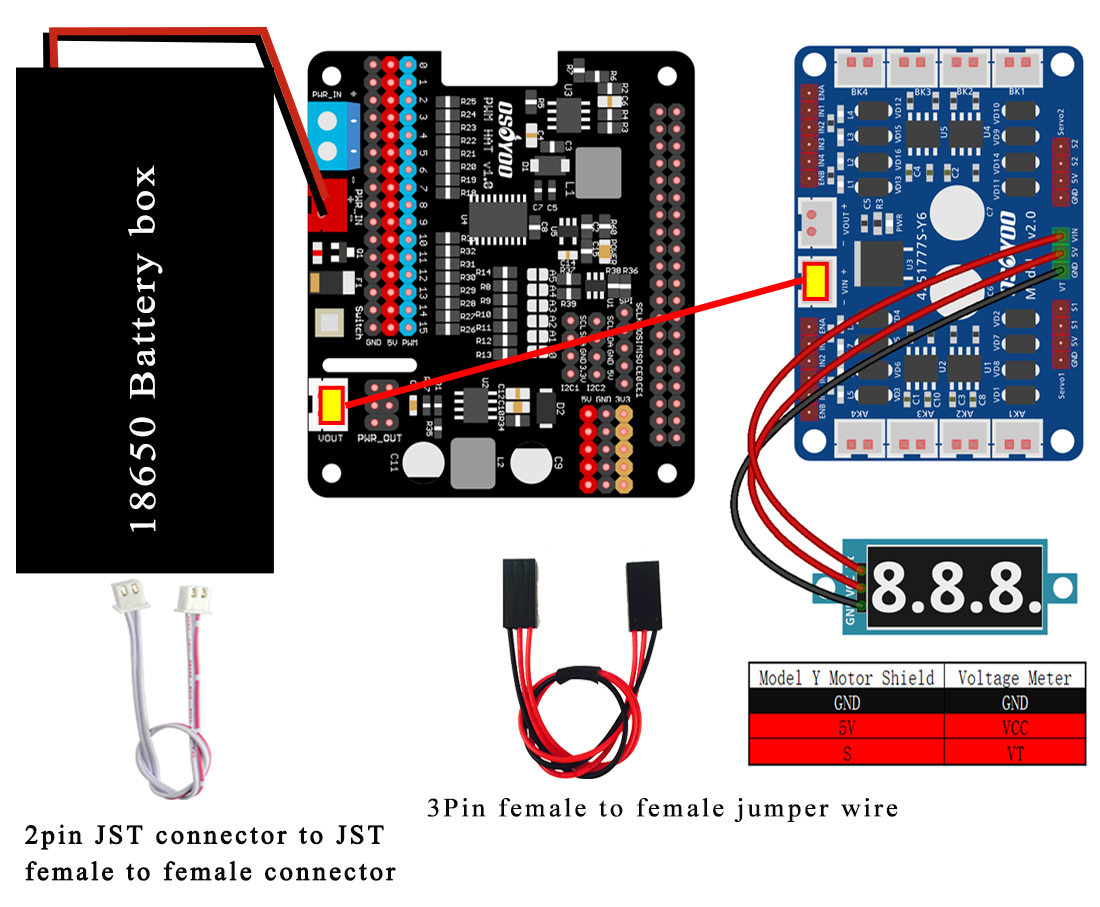
以下のグラフに従って、OSOYOO 2ピンPnPケーブル20cmを使用して、OSOYOO model Yボード12V-GNDソケットをVIN-GNDソケットに接続します。
以下の接続図に従って、バッテリーボックスをOSOYOO Uart WiFiシールドのVIN-GNDソケットに接続します。
17)前面横隔膜に2つのLEDライトを取り付けます。
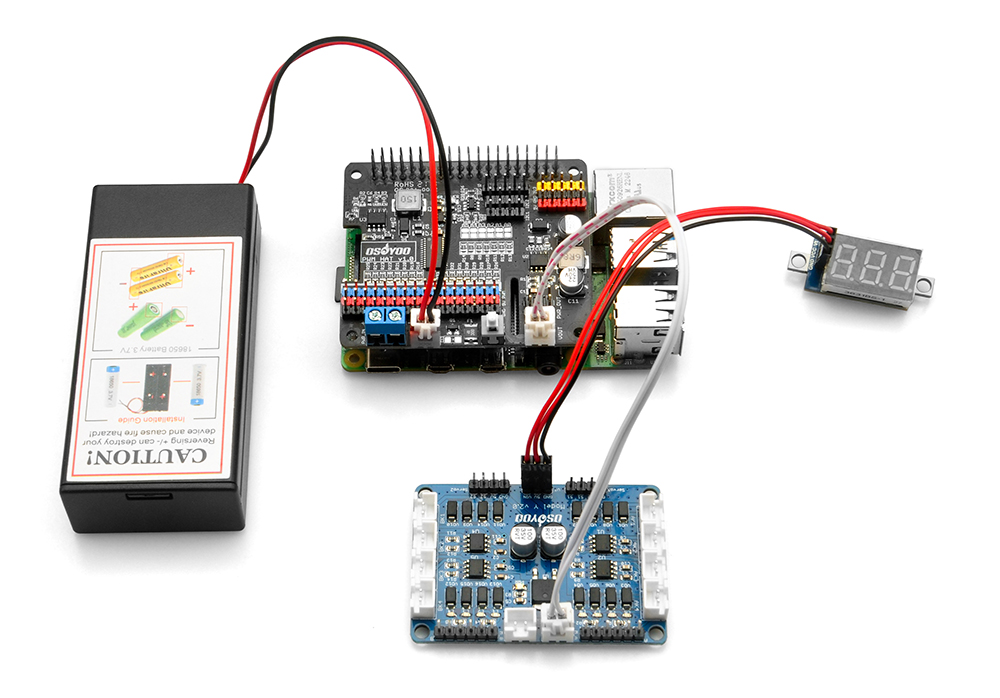
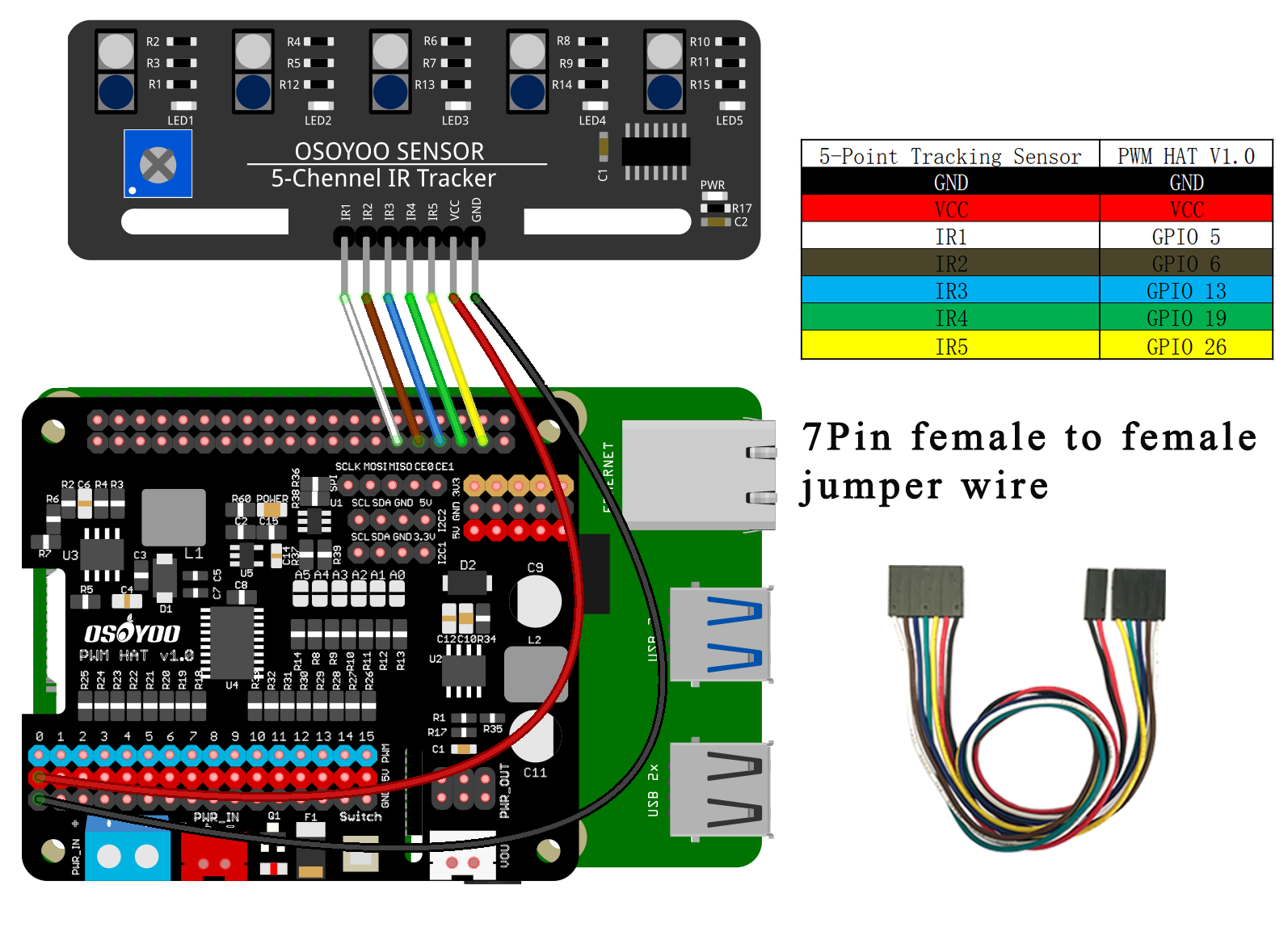
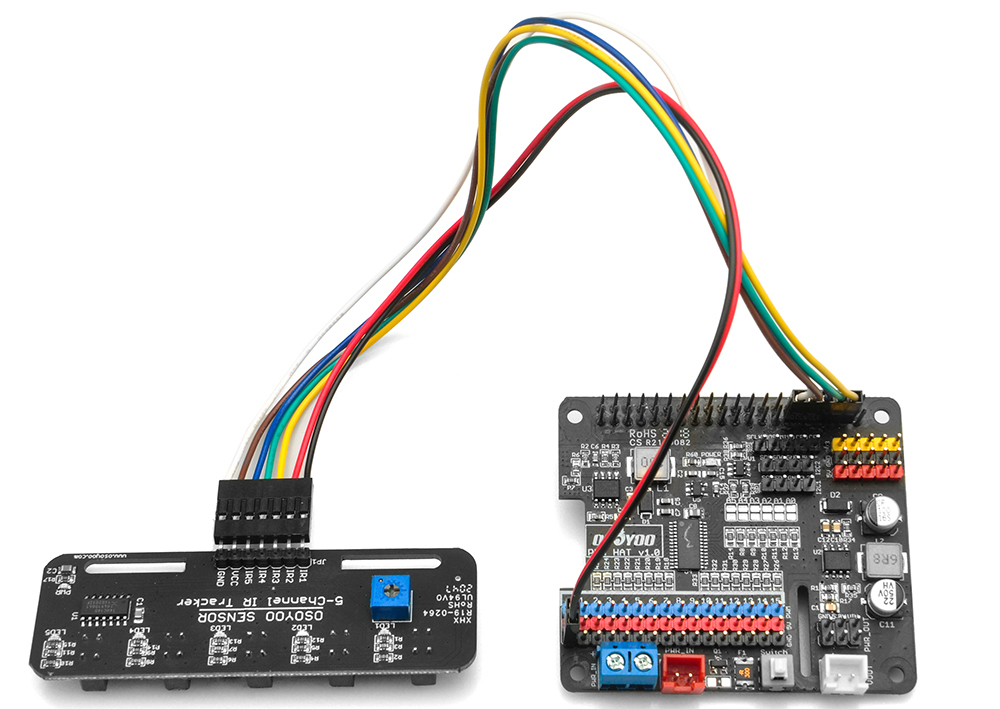
18)トラッキングセンサーモジュールのGND-VCCピンをOSOYOO PWM hatシールドのGND-5Vに接続します;以下の写真に示すように、7ピン25cmメス-メスケーブルを使用して、IR1、IR2、IR3、IR4、IR5ピンをGPIO5、GPIO6、GPIO13、GPIO19、GPIO26に接続します。
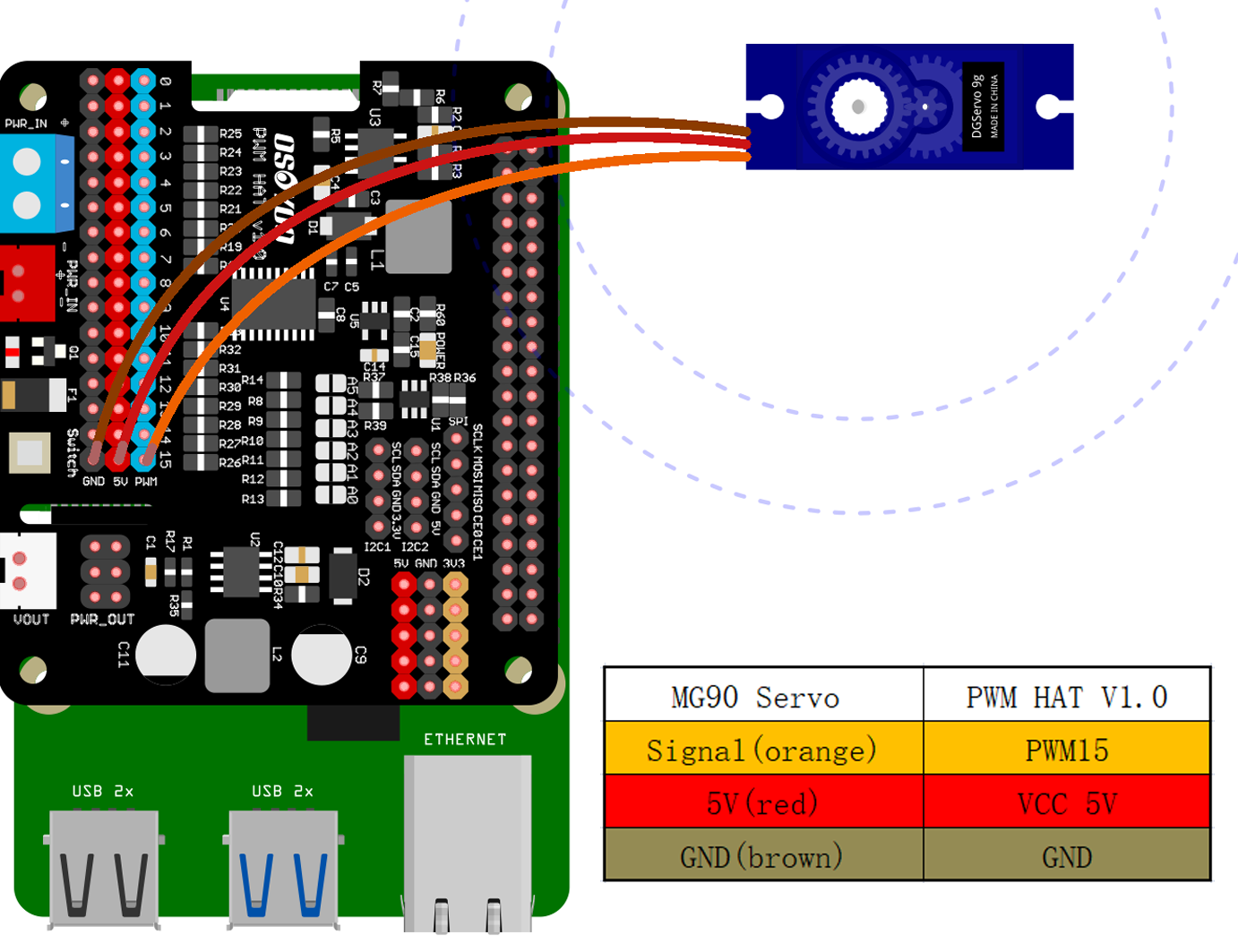
19)以下の図に従って、SG90サーボモーター、OSOYOO model Yボード、OSOYOO PWM hatを接続します。
20)上部と下部のシャーシを組み立てる前に、必要な回路接続がすべて完了していることを確認してください。6本のM3*10六角ネジを使用して、上部シャーシを下部シャーシに固定します。
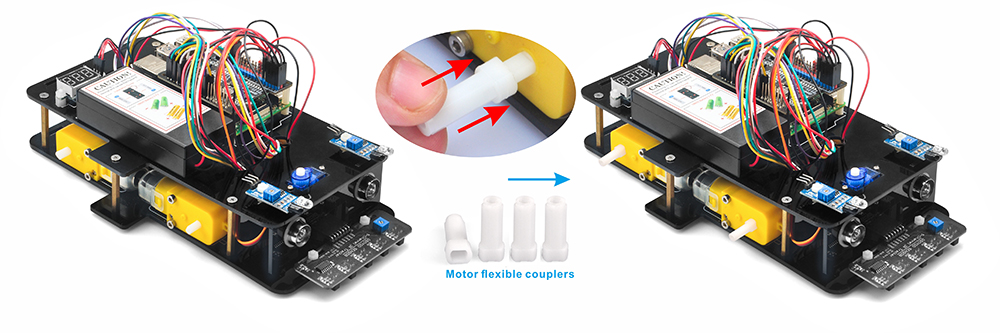
21)4本のM2.5X20ネジ を使用して、4つのフレキシブルカップリングとホイールをモーターに取り付けます。
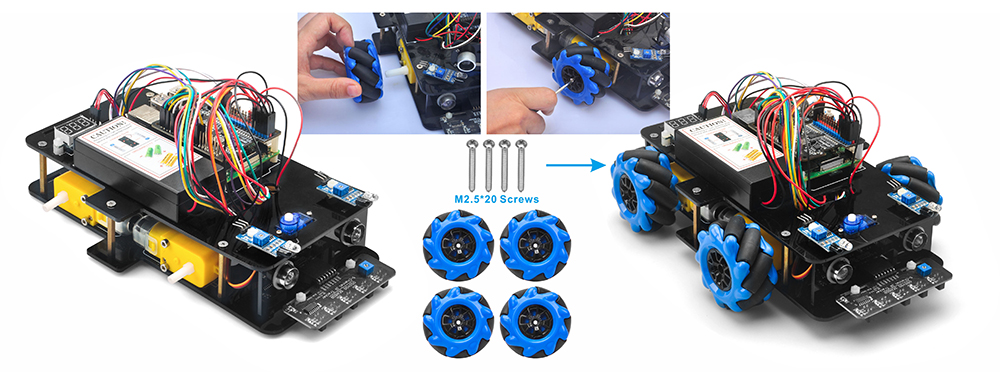
22)4本のM2.5X20ネジ を使用して、4つのホイールをモーターに取り付けます。
注意:ホイールには2つのタイプがあります。上から見たときにローラーが車の中心に向かって角度を付けて配置してください。
メカナムホイールには左と右の2つのタイプがあります。それらの違いはローラーの向きです。Aメカナムホイールの場合、以下に示すように、ローラーは右下から左上に向けて配置されています。Bホイールのローラーは逆の方向に取り付けられています。
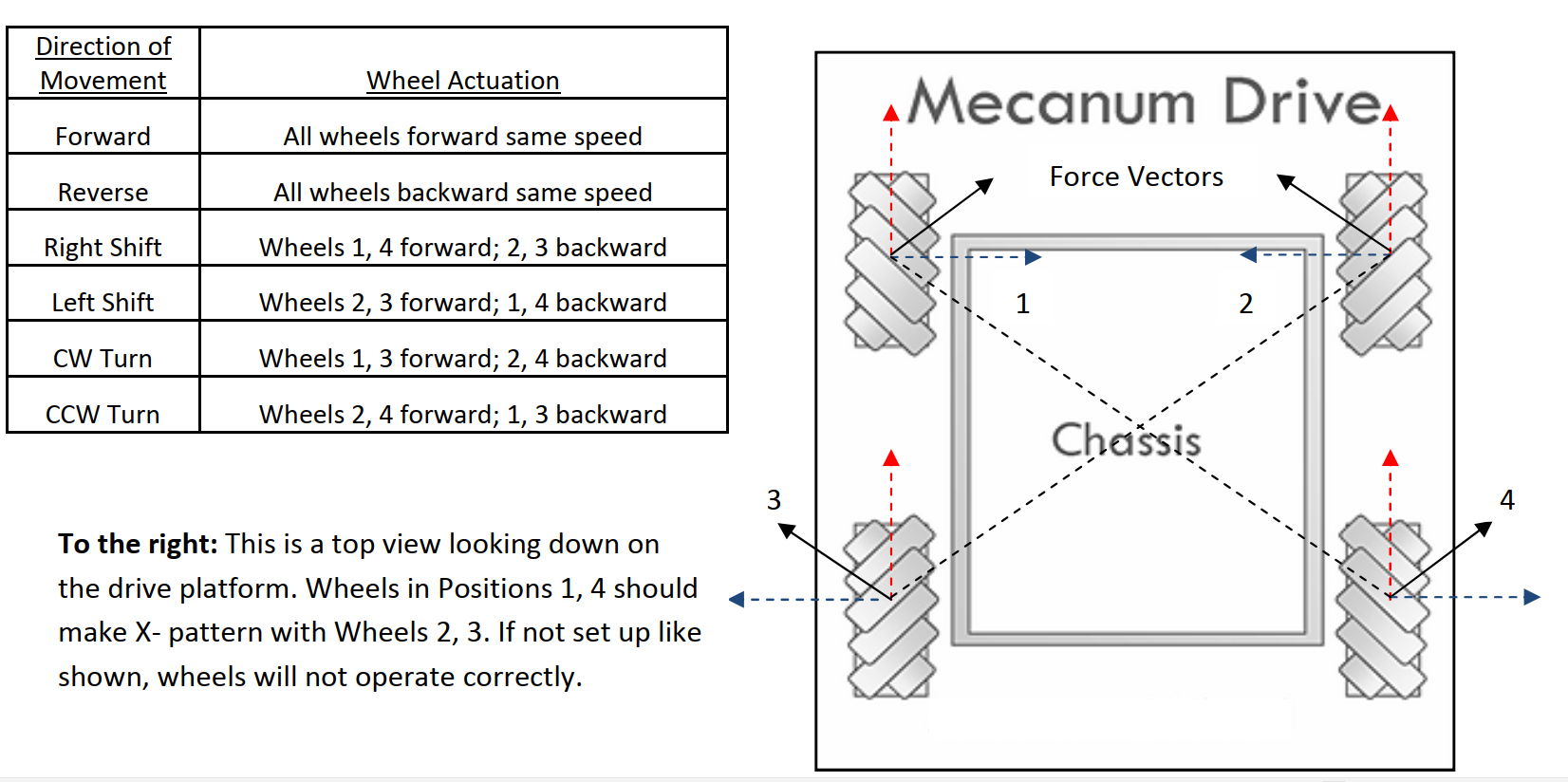
正しい構成では、以下に示すように4つのホイールのそれぞれが設定され、各ホイールの上部ローラーの回転軸がプラットフォームの中心を指すようになっています。すべての動的解析と事前に書かれたコードは、この構成に基づいていることに注意してください。
これでハードウェアのインストールはほぼ完了です。18650バッテリーをボックスに取り付ける前に、まずRaspberry Piにサンプルコードをアップロードして実行する必要があります。次のレッスンでは、Raspberry Piにサンプルコードをアップロードして実行する方法について詳しく説明します。