I.目的 II.部品とデバイス III.ハードウェアインストール IV.ソフトウェアインストール サンプルプロジェクト VI.遊び方
アメリカで購入
イギリスで購入
ドイツで購入
イタリアで購入
フランスで購入
スペインで購入
ここでご購入を!
VIDEO
このレッスンでは、Raspberry Piオペレーティングシステムのインストールとセットアップ 、およびOSOYOOメカナムホイールロボットカー を制御するために必要なソフトウェアとライブラリについてご案内します。
注意:ここではRaspberry Pi imager v1.8.5を例にOSをインストールしており、他のバージョンでは多少の違いがある場合があります。(デバイス:Raspberry Pi 4B)
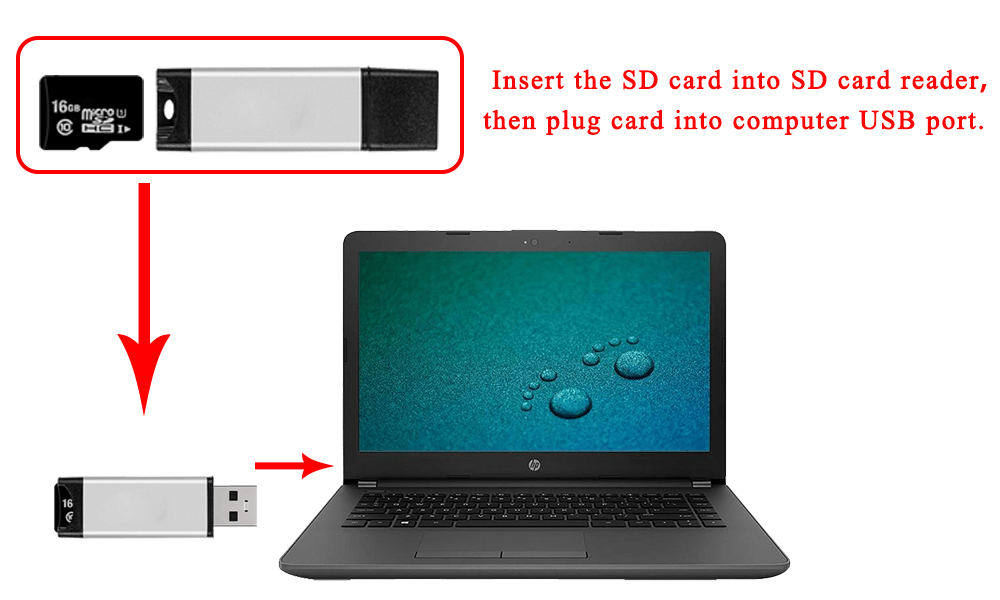
ステップ1:USBマイクロSDカードリーダー付きの新しくフォーマットされたマイクロSDメモリーカード(TFカード)を準備します。推奨サイズは16G、32Gです。(SDカードにRasbian OSイメージがプリインストールされている場合は、このステップをスキップしてください )。
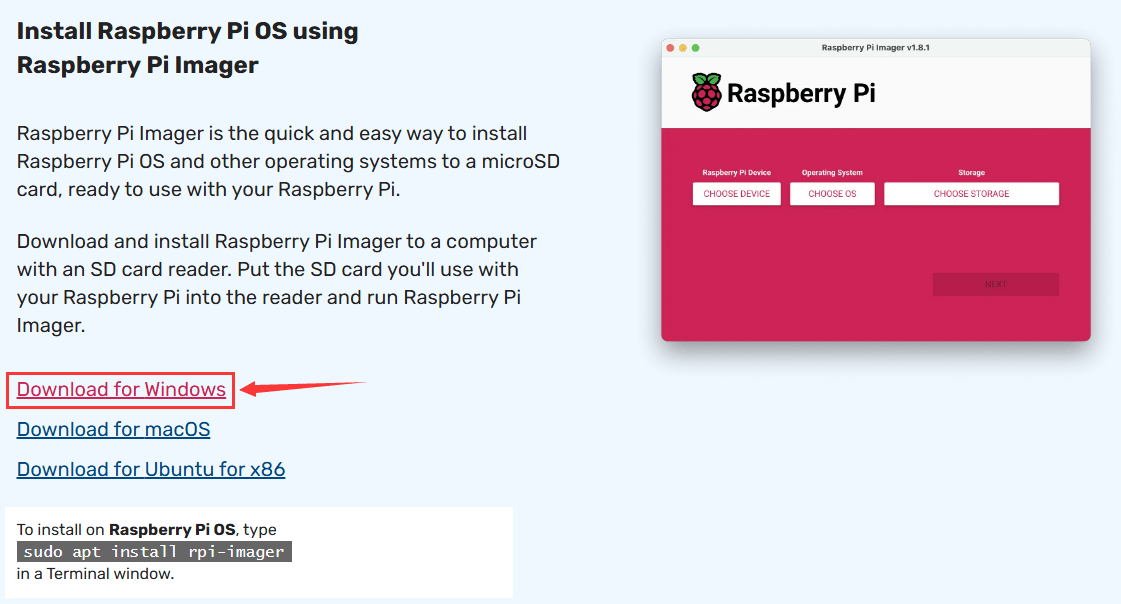
ステップ2:Raspberry Pi公式ウェブサイトからRaspberry Pi Imagerをダウンロードします:https://www.raspberrypi.com/software/ 。
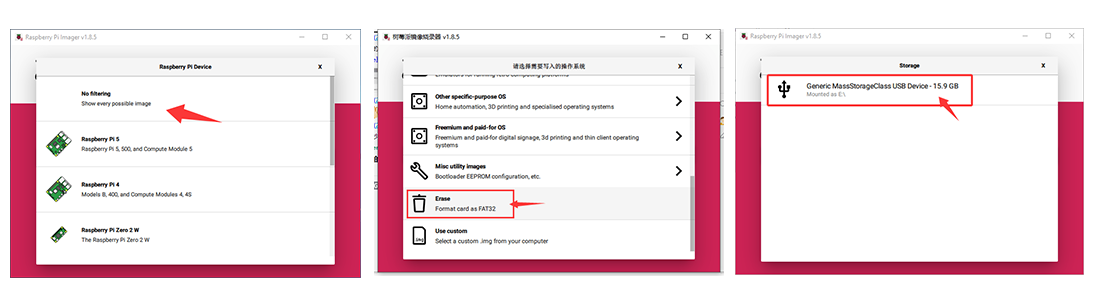
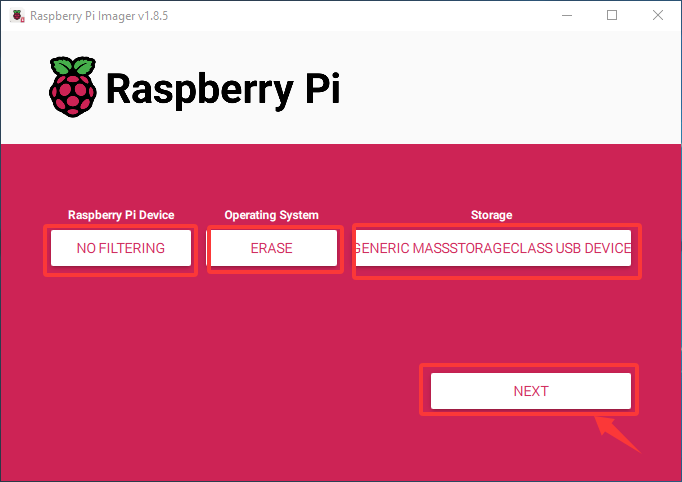
ステップ3:マイクロSDカードをフォーマットします:Raspberry Pi Imagerを実行し、オペレーティングシステムフィールドで「Erase」を選択し、ストレージフィールドで「あなたのマイクロSDカード」を選択します。
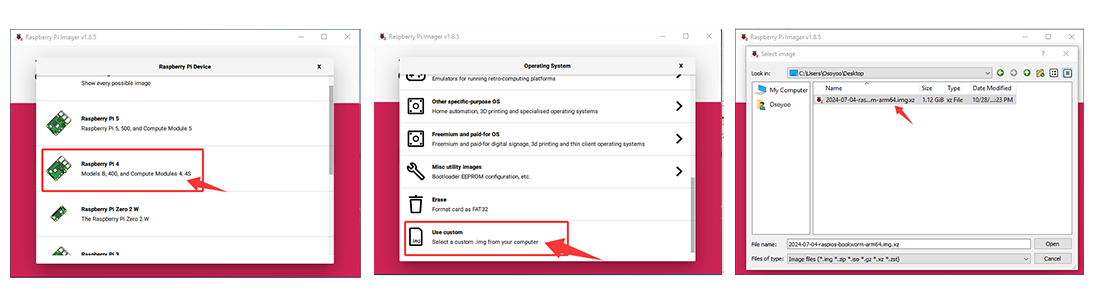
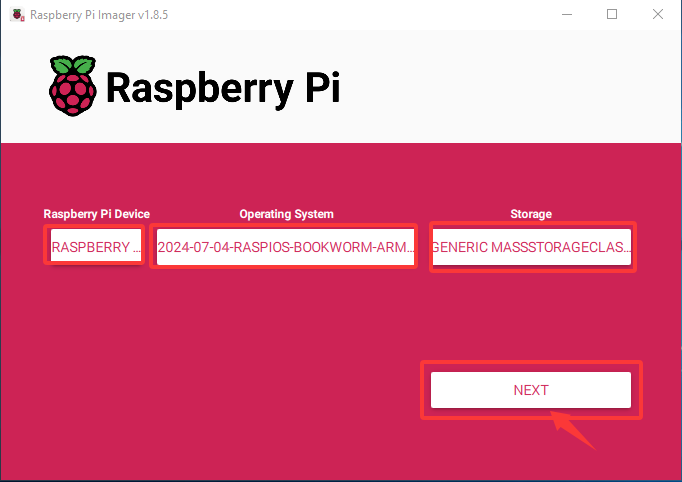
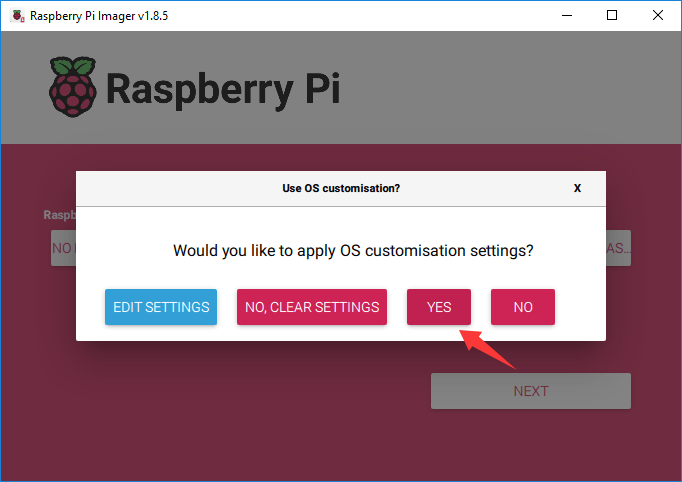
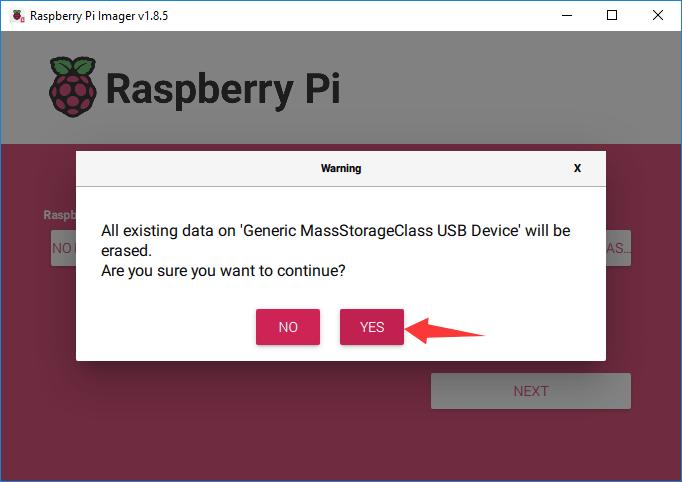
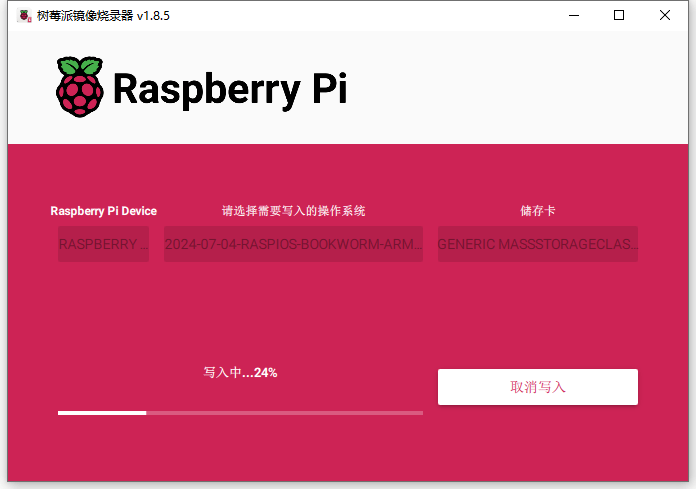
ステップ4:Raspberry Pi Imagerを実行し、デバイスでRaspberry pi 4を選択し、次にオペレーティングシステムフィールドで「Use custom」を選択してダウンロードした「Raspberry Pi OS」を参照し、ストレージフィールドで「あなたのSDカード」を選択します。(SDカードにRaspberry Pi OSを書き込み済みの場合は、ステップ2からステップ5をスキップしてください)。
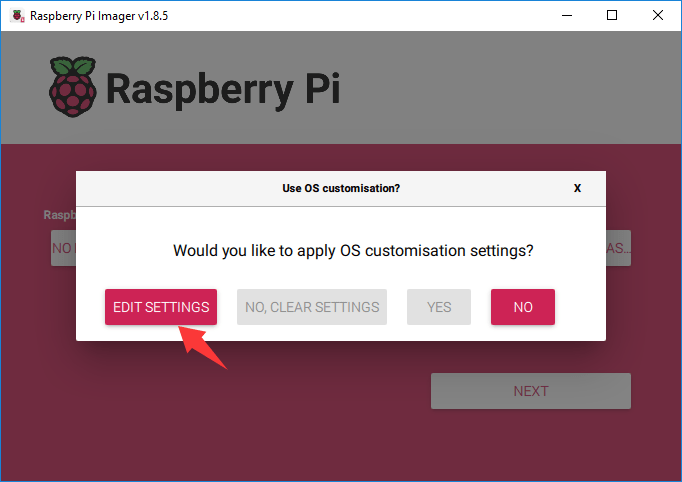
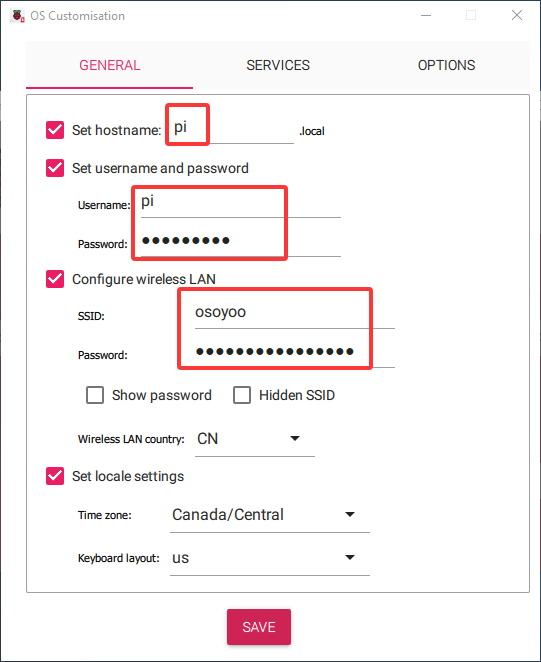
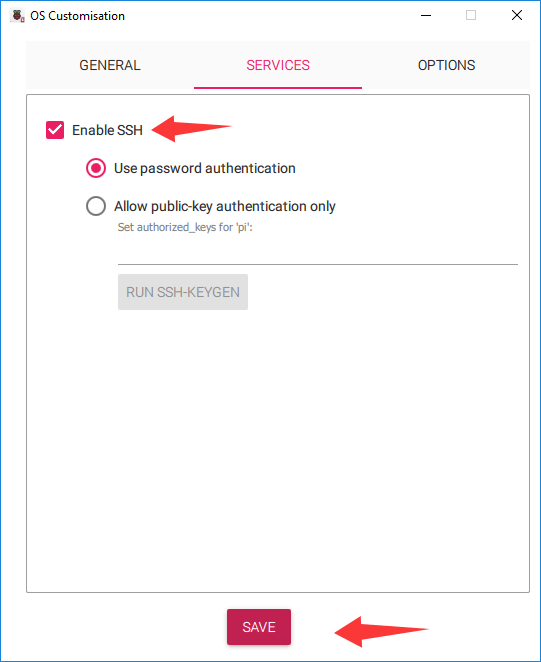
ステップ5:「EDIT SETTINGS」をクリックしてユーザー名とパスワードを設定し(この例では「pi」をユーザー名、「raspberry」をパスワードとして使用)、ワイヤレスLANを設定し、次にSERVICESをクリックしてSSHを有効にし、最後に「SAVE」をクリックします。
Raspberry Piをリモート制御する
ステップ1:IPアドレスを知る
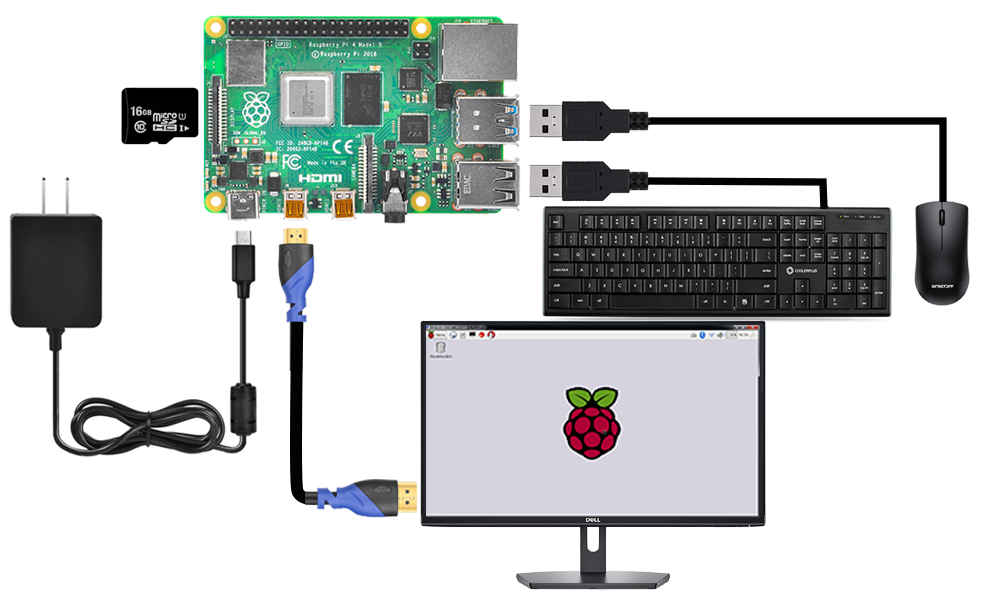
1. Raspberry PiをHDMIモニターまたはTVに接続します。キーボードとマウスをRaspberry PiのUSBポートに接続します。OSがインストールされたSDカードをRaspberry Piのスロットに挿入します(Raspberry Piロボットカーを既に組み立てている場合は、IPアドレスを確認するためにスクリーンに接続してください)。
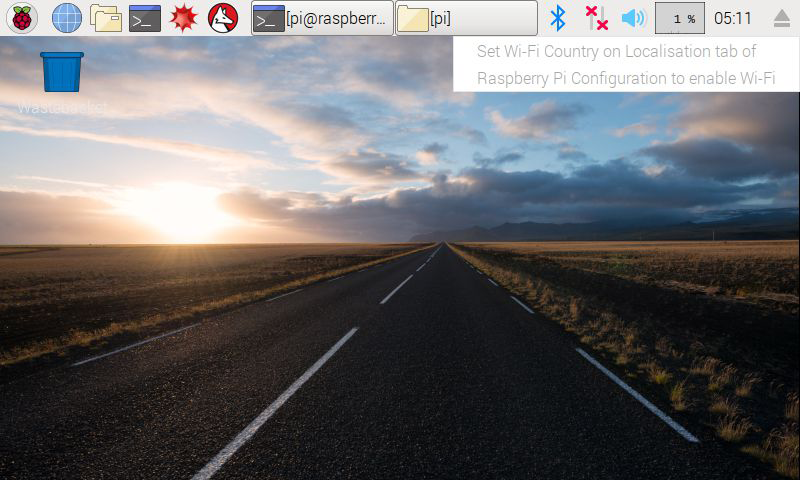
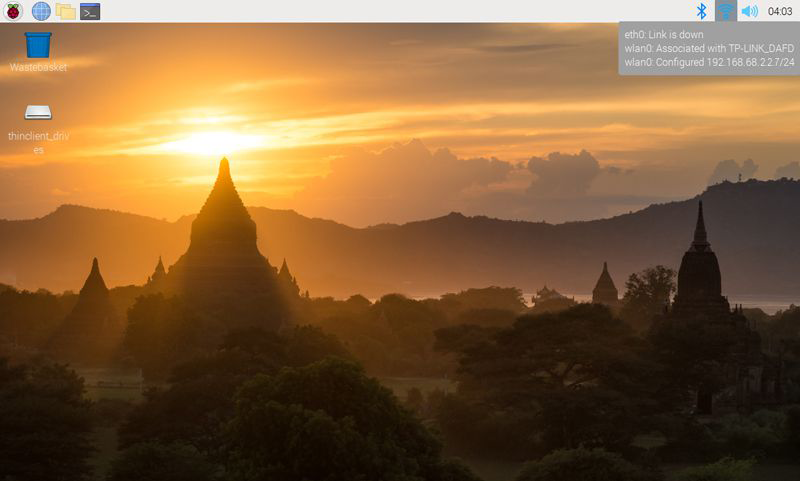
2. LANアイコンにマウスを移動 すると、以下のような通知が表示されます:
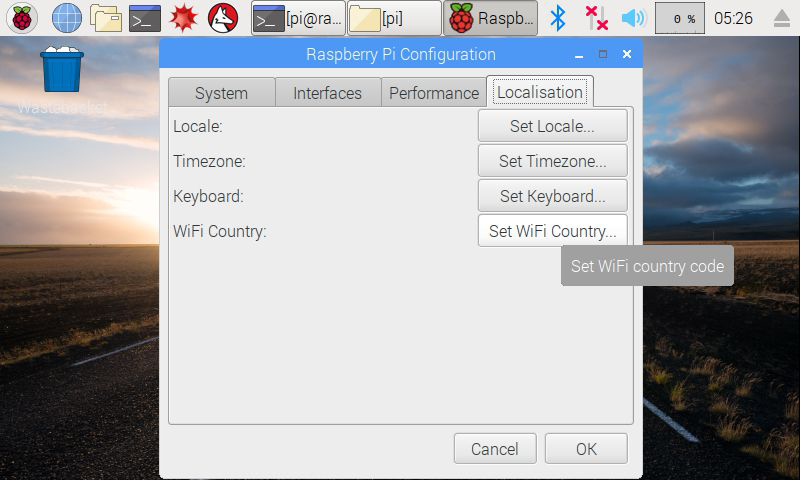
3. 以下のようにWIFI設定を設定してください:
4. RPiのIPアドレスを確認します。方法A :Piをモニターとマウスに接続し、以下の写真のようにLANまたはWIFIアイコンをクリックしてIPアドレスを取得します
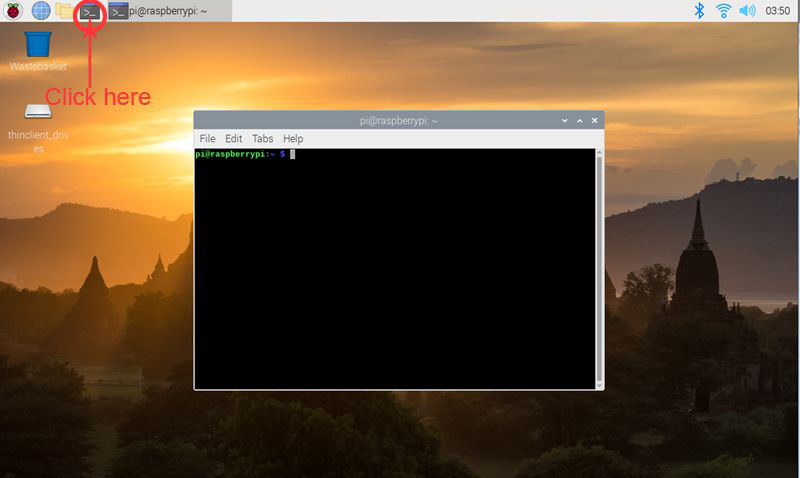
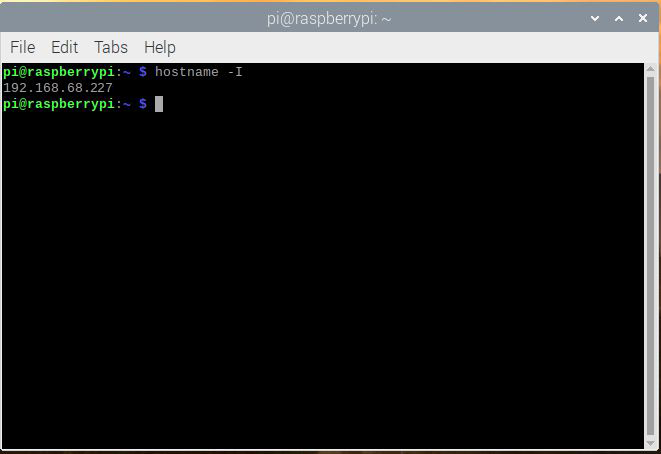
方法B: 画面でターミナルを開き、ターミナルウィンドウで以下のコマンドを入力してIPアドレスを取得します:
hostname -I
ステップ2:SSHクライアントを使用してRaspberry Piをリモート制御します。
1. OSがインストールされたSDカードをRaspberry Piボードに挿入し(SDカードを挿入する前に、まずRaspberry Piの電源を切ってください)、その後ロボットカーの電源を入れます。
2. PuTTYを以下からダウンロードします:https://www.chiark.greenend.org.uk/~sgtatham/putty/ そして、このexeファイルをWindows PCにインストールします
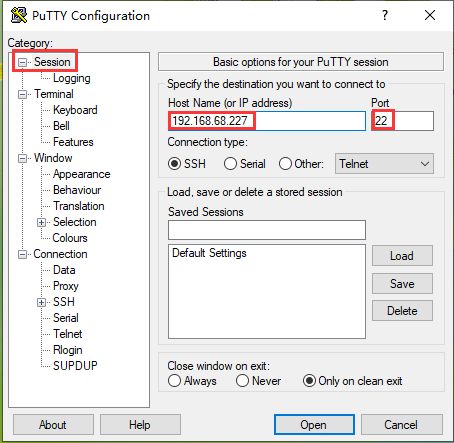
3. PuTTYを開き、左側のツリー状の構造でSessionをクリックし(通常、PuTTY起動時は折りたたまれています)、取得したIPアドレスをHost Name pi(またはIPアドレス192.168.68.227)の下のテキストボックスに入力し、Portの下に22(デフォルトでは22)を入力し、openをクリックします。
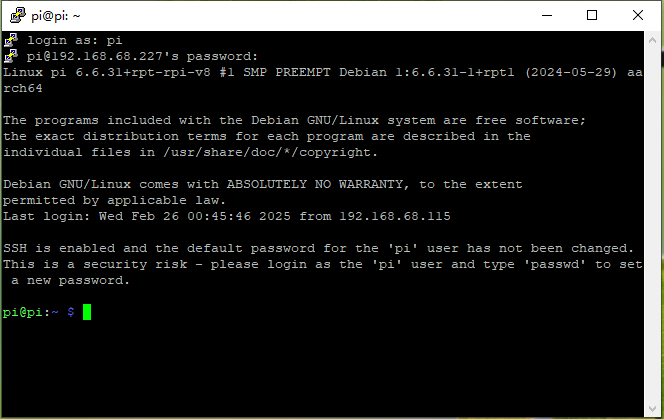
4. IPアドレスでRaspberry Piに初めてログインする際は、セキュリティリマインダーが表示されることに注意してください。Yes をクリックしてください。PuTTYウィンドウでlogin as:と表示されたら、ユーザー名:pi 、パスワード:raspberry (変更していない場合のデフォルト)を入力してください。注意:パスワードを入力している間、ウィンドウには何も表示されませんが、実際には入力されています。正しく入力することに集中してEnterを押してください。RPiに正常にログインすると、ウィンドウは以下のように表示されます:
********************サンプルプロジェクト********************
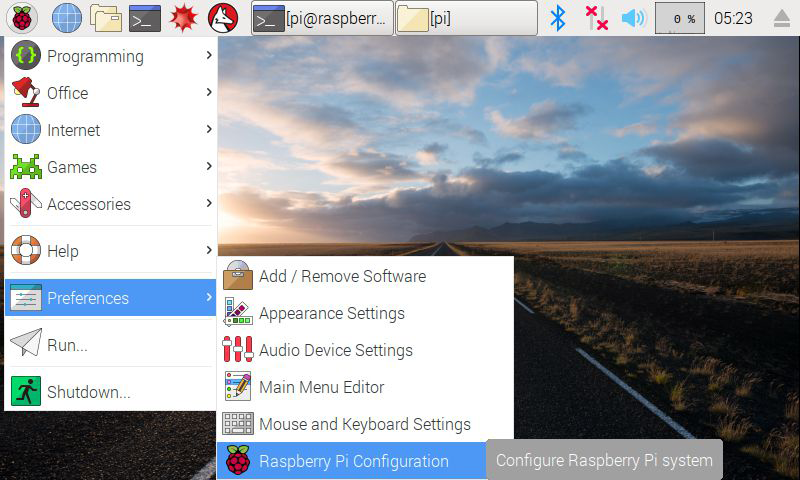
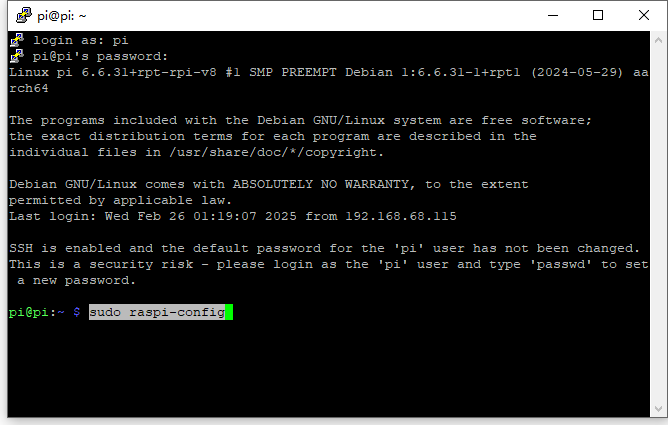
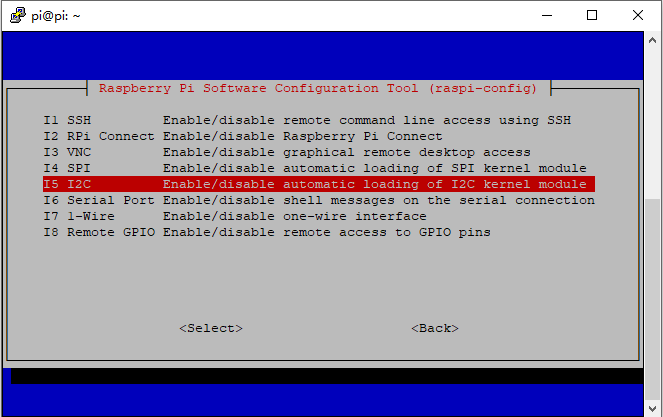
ステップ1:I2Cを有効にする
I2Cを有効にしていない場合は、以下のコマンドを実行してI2Cを有効にしてください。
sudo raspi-config
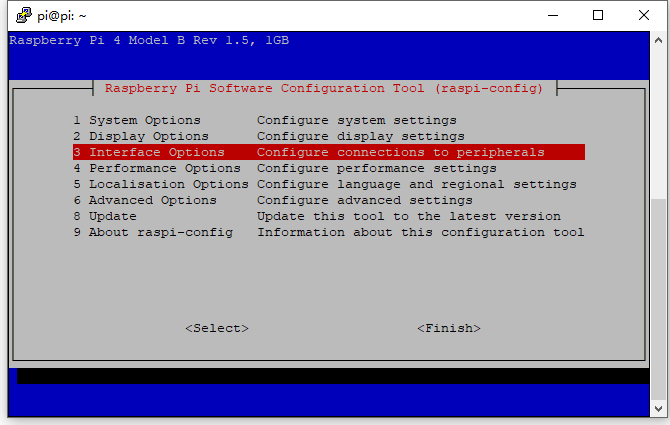
次にInterfacing Options->I2C->Yes->Ok->Finishを選択します
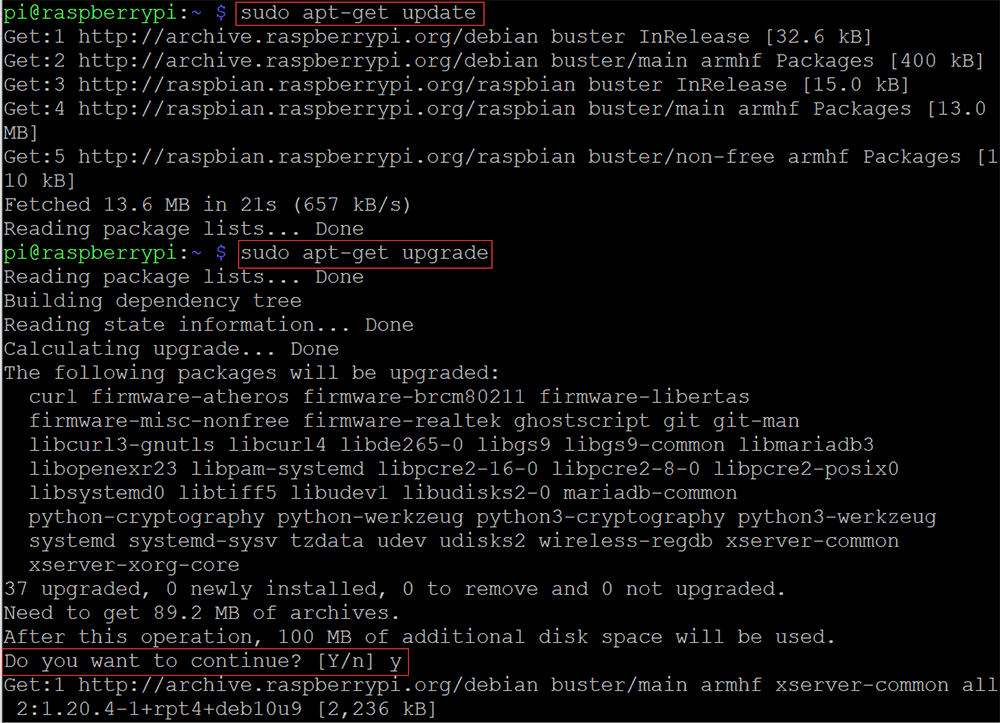
ステップ2: rpi.gpioとadafruit-pca9685ライブラリがない場合は、以下のコマンドを使用してライブラリをインストールしてください。
sudo apt-get update
sudo apt-get upgrade
ステップ3: pca9685とservokitライブラリをインストールします:
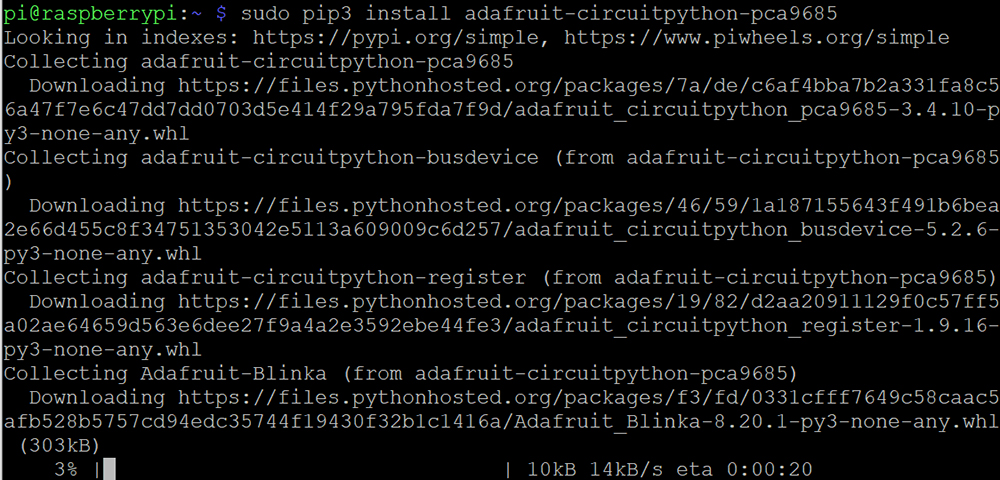
1) Trixie OSを使用している場合は、以下のコマンドを実行してください:sudo pip3 install --break-system-packages adafruit-circuitpython-pca9685
sudo pip3 install --break-system-packages adafruit-circuitpython-servokit
sudo pip3 install --break-system-packages adafruit-blinka
ステップ4: 以下のコマンドを入力してサンプルコードをダウンロードします。
wget https://osoyoo.com/driver/mecanum/mecanum5.py
ステップ5 :ロボットカーを地面に置き、以下のコマンドを実行します:
python mecanum5.py
上記のpythonが実行されると、モーターは0.75秒間前進し、その後0.75秒間後退し、0.75秒間左折し、0.75秒間右折し、その後右にシフトし、次に左にシフトし、その後いくつかの全方向移動を行って停止します。
このレッスンの終わりまでに、Raspberry Piが完全に設定され、ロボットカーをリモート制御 し、移動コマンド(python mecanum.py
カーは以下の順序で移動します:前進→後退→右平行シフト→左平行シフト→左前方斜め移動→元の位置に戻る→右前方斜め移動→元の位置に戻る→左折→右折→、そして最後に停止します。











 ステップ3: pca9685とservokitライブラリをインストールします:
1) Trixie OSを使用している場合は、以下のコマンドを実行してください:
ステップ3: pca9685とservokitライブラリをインストールします:
1) Trixie OSを使用している場合は、以下のコマンドを実行してください: