| アメリカで購入 |
イギリスで購入 |
ドイツで購入 |
イタリアで購入 |
フランスで購入 |
スペインで購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

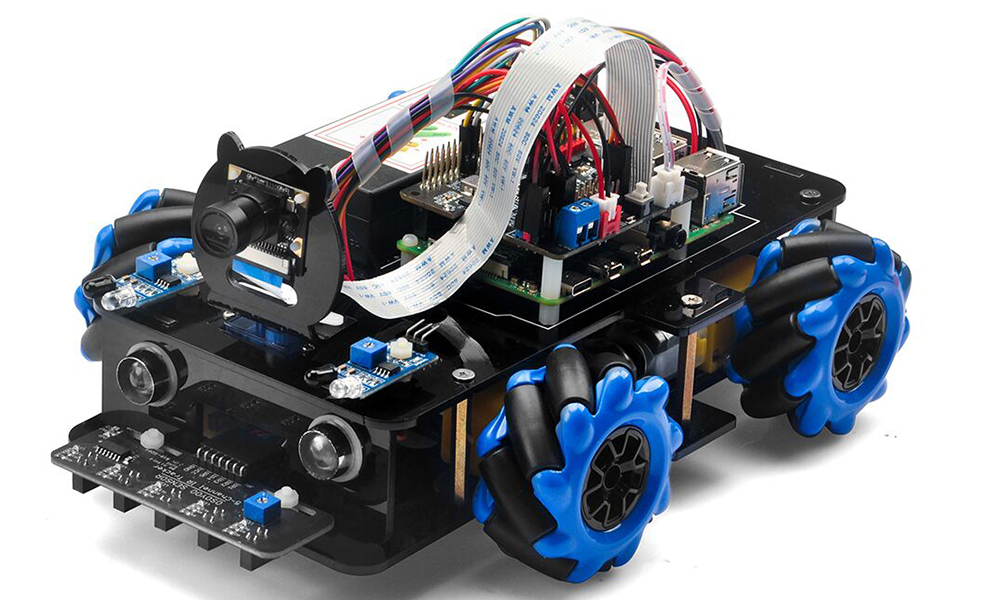
このレッスンでは、Python3 FlaskとCamera Streamソフトウェアを使用して、インターネット経由でRaspberry Piロボットカーを制御する方法を紹介します。カーの目(前面カメラ)を通してカーのリアルタイムの動きを監視できます。

OSOYOOメカナムホイールロボットカーシャーシ x1
OSOYOOホイールとモーター x4(左ホイール x2/右ホイール x2)
Raspberry pi 4Bボード
OSOYOO PWM HATシールド x1
OSOYOO Model Yドライバーボード x1
OSOYOO電圧計 x1
OSOYOO CSIカメラ(ケーブル付き)x1
OSOYOOカメラホルダー x1
OSOYOOバッテリーボックス x1
OSOYOO 3ピンメス-メスジャンパーワイヤー x1
OSOYOO 6ピンメス-メスジャンパーワイヤー x2
OSOYOO 2ピンXH2.54メス-メス x1
18650バッテリー(3.7V)x2
バッテリー充電器 x1

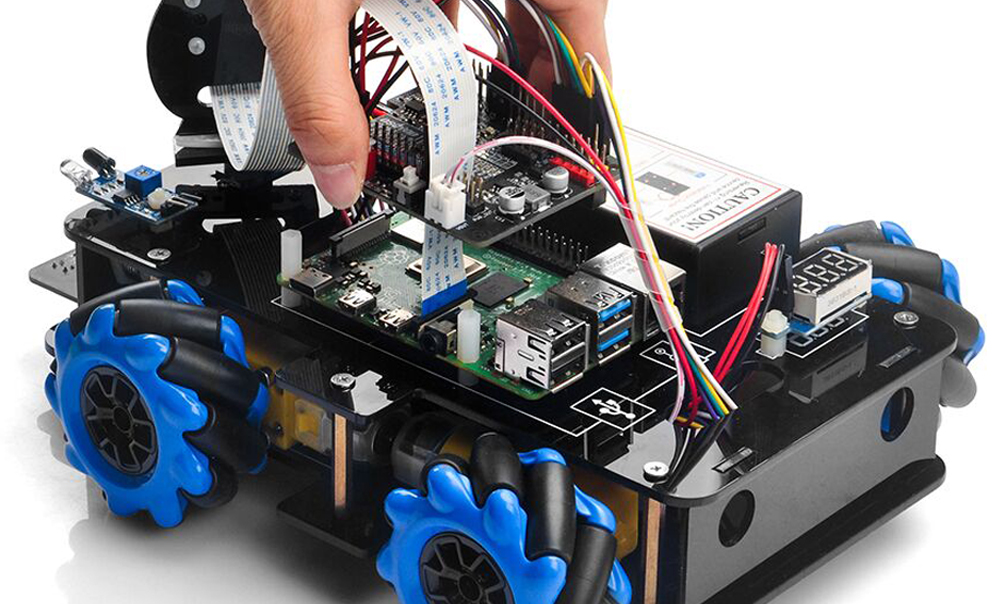
ステップ1:レッスン1の基本フレームワークを完了する必要があります。サーボを取り付けてPWM 15ポートに接続する必要があります。(既にインストール済みの場合は無視してください)
ステップ2:サーボモーターのスロット付きブラケットを選択し、カメラホルダーを上から下に通し、M1.5*6タッピングネジでブレードを固定します。

ステップ3:4個のM2プッシュピンリベットを使用して、CSIカメラをカメラホルダーに取り付けます。
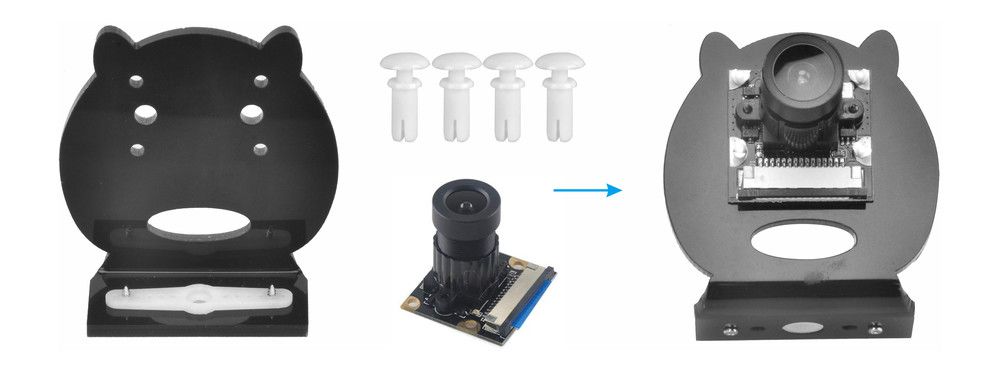
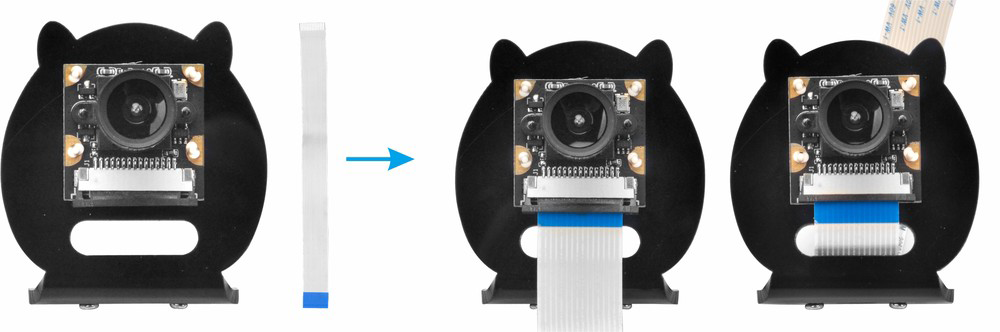
ステップ4:CSIリボンケーブルをCSIカメラに接続します。
ステップ5:M2*4タッピングネジを使用して、カメラホルダーをサーボモーターに取り付けます。
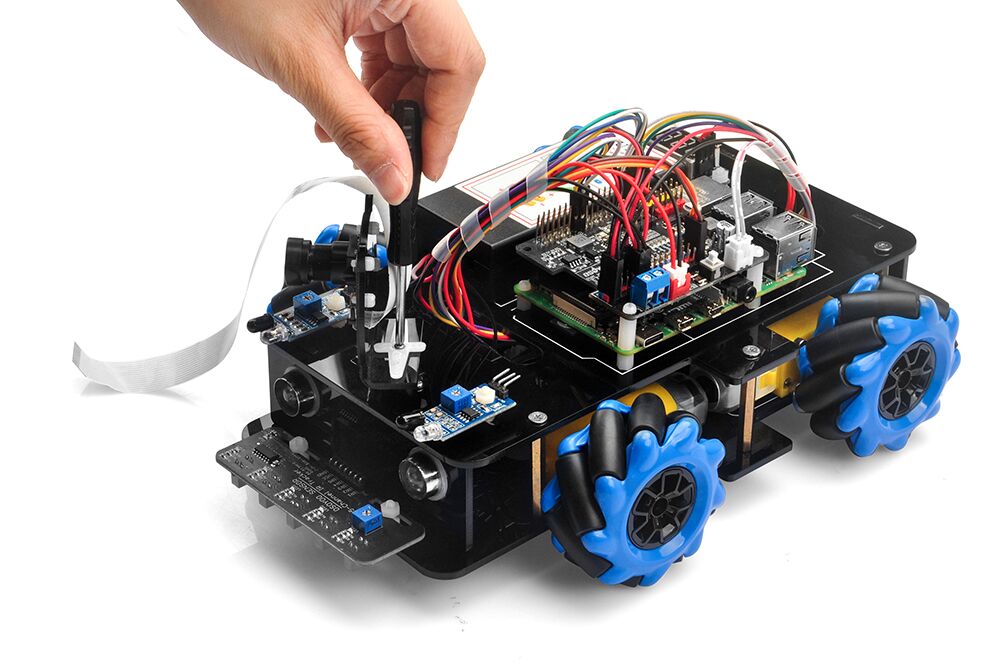
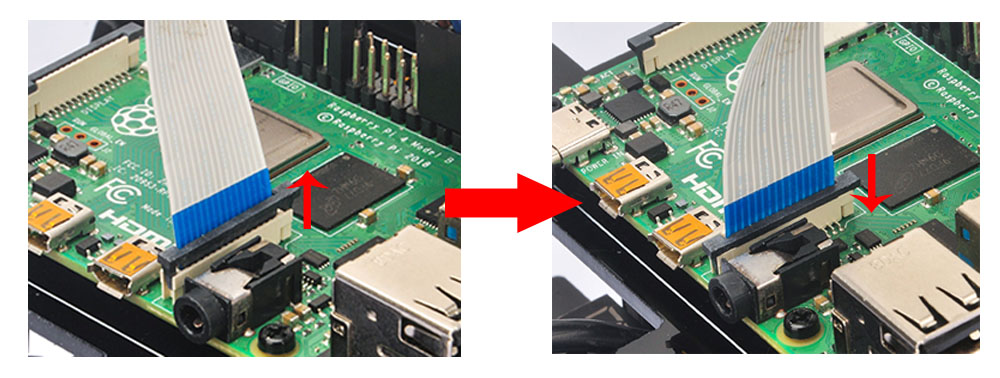
ステップ6:CSIリボンケーブルを使用して、CSIカメラをRaspberry PiのCSIスロットに接続します(インストールする前にケーブルの接続に注意してください。)
ステップ7:OSOYOO PWM HATをraspberry piボードに取り付けます

レッスン1でrpi.gpio、adafruit-pca9685ライブラリをインストールし、I2Cを有効にしていることを確認し、ロボットカーの電源を入れてください。
Raspberry Piでpicameraストリーマーサーバーを開始するには、以下のコマンドを使用してください
ステップ1:以下のコマンドを入力してRaspberry PiでカメラをEnable有効にしてください(注意:BOOKWORM OSを書き込んだ場合は、カメラを有効にする必要はありません)
sudo raspi-config
次に→ Interfacing Options→ Camera→ No→ Ok→ Finishを選択します(通知に従ってRaspberry Piを再起動してください。)
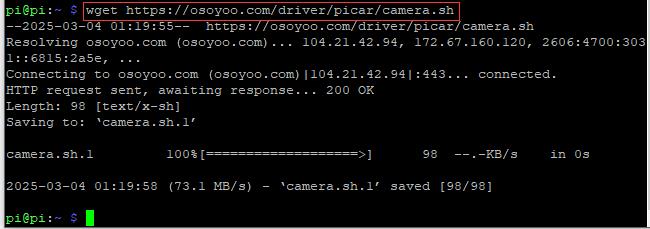
ステップ2:以下のコマンドを入力してOsoyoo Camera Streamソフトウェアをダウンロードします:
wget https://osoyoo.com/driver/picar/camera.sh
 ステップ3:Osoyoo Camera Streamソフトウェアをインストールします。これは一度だけのインストール作業で、以下のコマンドを入力してソフトウェアを一度だけインストールする必要があります:
ステップ3:Osoyoo Camera Streamソフトウェアをインストールします。これは一度だけのインストール作業で、以下のコマンドを入力してソフトウェアを一度だけインストールする必要があります:
bash camera.sh
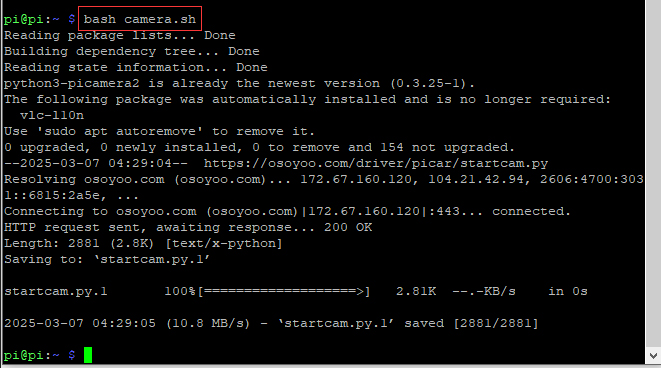
上記のコマンドを実行した後、Osoyoo Camera StreamソフトウェアがRaspberry Piにインストールされます。とても簡単です!
注意:Camera Streamソフトウェアは一度だけインストールする必要があります!将来カメラストリームを実行したい場合は、次のステップ(ステップ4)に従ってpython startcam.pyファイルを実行するだけです。
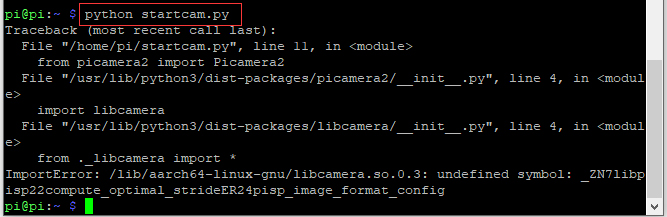
ステップ4:カメラサーバーをインストールした後、Raspberry Piターミナルで以下のコマンドを実行して開始します:
python startcam.py
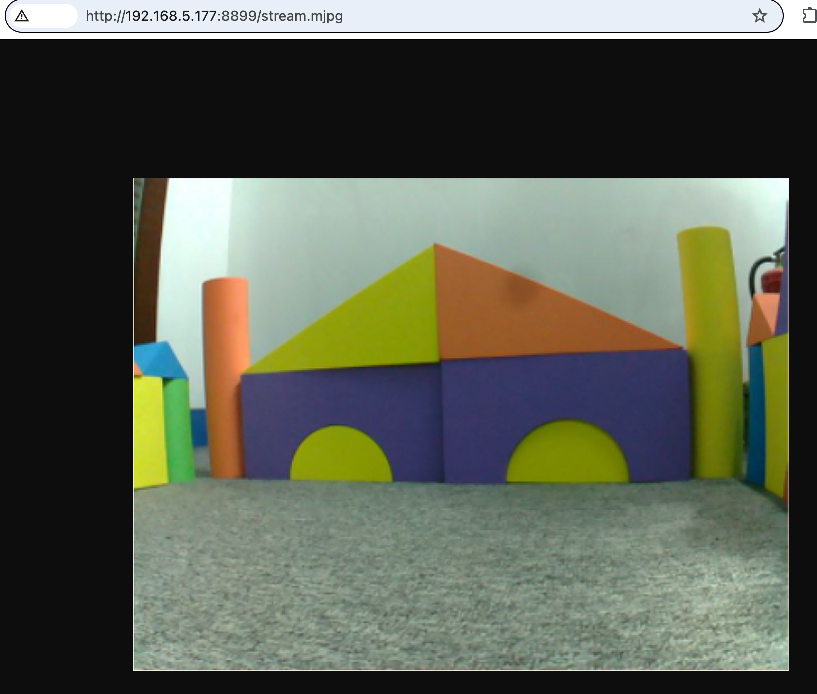
ステップ5:これで、ブラウザを使用して監視ビデオをテストできます。http://your_raspberry_pi_ip:8899/stream.mjpg(私の場合はhttp://192.168.68.227:8899/stream.mjpg)にアクセスすると、ビデオ監視が表示されます。
方法1:ブラウザを使用してインターネット経由でRaspberry Piロボットカーを制御する
ステップ1:新しいターミナルウィンドウを開き、以下のコードを実行してOSOYOOウェブカメラ制御ロボットカーソフトウェアをインストールします
wget https://osoyoo.com/driver/mecanum/osoyoowebcar.sh -O osoyoowebcar.sh
ステップ2:以下のコマンドを入力します:
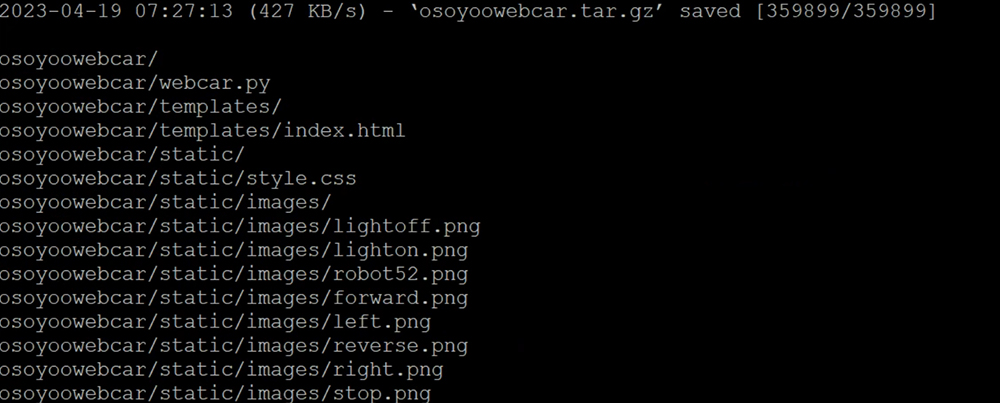
bash osoyoowebcar.sh
上記のコマンドを実行すると、osoyoowebcarというディレクトリが自動的に作成され、構造は以下のようになります:
ステップ3:以下のコマンドを入力してosoyoowebcarフォルダに入ります
cd osoyoowebcar

ステップ4:次に以下のコマンドを入力してファイルtemplates/index.htmlを編集します
nano templates/index.html
ステップ5:34行目の10.0.0.89をあなたのpiのIPアドレスに置き換え、「Ctrl」+「X」をクリックしてから「Y」をクリックしてファイルを保存し、「enter」をクリックしてファイルを終了してください
ステップ6:カーを地面に置き、以下のコマンドを入力してコードを実行します
sudo python ~/osoyoowebcar/webcar.py
ステップ7:Raspberry Piと同じWi-Fiネットワークに接続されたPCまたは携帯電話で、ブラウザを開いてhttp://your_RaspberryPi_ip_addressにアクセスします。
矢印ボタンは方向制御キー、中央の赤い円ボタンはSTOPキーです。下部には4つの速度制御ボタンがあります:
- 0キーは最も遅い速度を意味します
- –キーは2番目に遅い速度を意味します
- ==キーは通常の速度を意味します
- ++キーは最も速い速度を意味します
ページの上部には、カメラ方向スライダーがあり、スライダーを動かしてシフト動作を行うことができます。
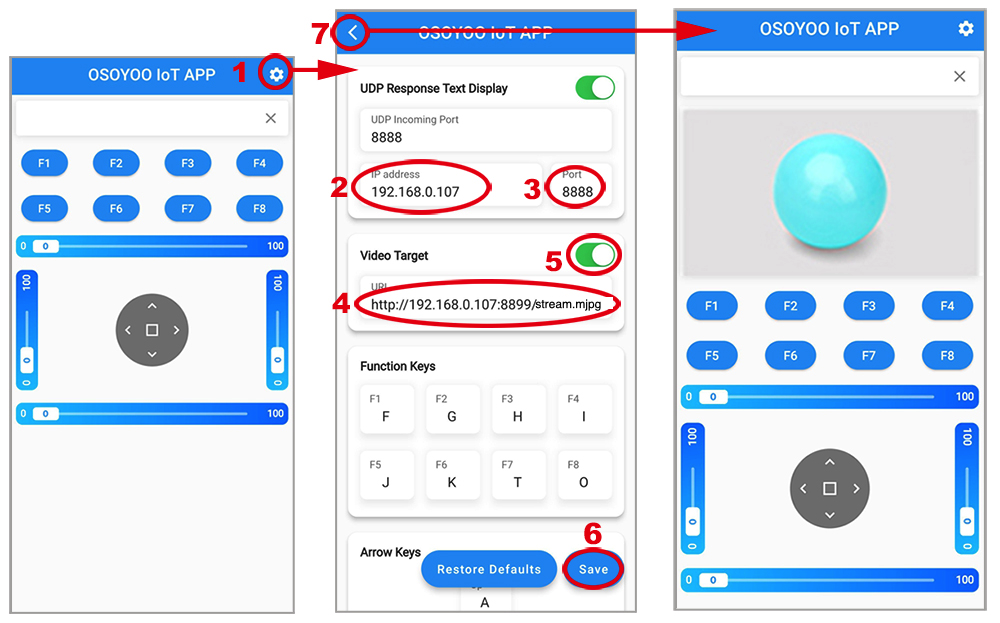
方法2:APPを使用してインターネット経由でRaspberry Piロボットカーを制御する
ステップ1:新しいターミナルウィンドウを開き、以下のコードを実行してAPP制御用のサンプルコードをダウンロードします
wget https://osoyoo.com/driver/mecanum/udpmecan5.py -O udpmecan5.py
ステップ2:以下のコマンドを入力してサンプルコードを実行します(注意:Piボードに応じて正しいコマンドを選択してください):
python udpmecan5.py