| Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
 |
 |
 |
 |
 |
Content
Description
The MKS SERVO42D CAN closed-loop stepper motor features a pulse interface and integrates a high-efficiency FOC (Field-Oriented Control) vector algorithm. Equipped with a high-precision encoder, it utilizes position feedback to effectively prevent step loss. It is well suited for applications such as small robotic arms, 3D printers, CNC engraving machines, writing/plotting machines, automation equipment, and electronics competitions.

Key Features
- Supports six operating modes: Pulse interface (open-loop, closed-loop, FOC modes) and serial interface (open-loop, closed-loop, FOC modes);
- High-performance FOC vector control with triple closed-loop control of torque, speed, and position;
- Supports acceleration/deceleration profiling for smoother motor start and stop;
- Supports single-turn unlimited homing;
- Supports multi-turn limited homing with configurable left and right limit positions;
- Supports direct zero-position setting;
- Supports both relative and absolute positioning modes;
- Configurable microstepping from 1 to 256;
- Built-in 256 microstep interpolation algorithm for ultra-quiet operation and minimal vibration;
- Maximum input pulse frequency: 160 kHz; maximum speed: 3000 RPM+;
- Real-time motor angle feedback (available in both enabled and disabled states);
- Onboard industrial-grade high-precision 16,384-line magnetic encoder;
- Integrated with 8 high-power MOSFETs, rated at 40 V / 20 A;
- Built-in CAN interface supporting up to 2048 node addresses and group addressing;
- Maximum operating current: 3.0 A; MOSFET continuous current: 20 A (at 25°C);
- Onboard OLED display and buttons for convenient parameter configuration, with auto-save and immediate effect;
- Stall protection function included;
- Encoder self-calibration supported;
- One-click factory reset;
- Stable high-speed performance with smooth, vibration-free operation and support for emergency stop;
- Integrated aluminum alloy housing for efficient heat dissipation, enabling stable operation under continuous high current;
- Supports homing via limit switch with unlimited travel.
- User manual: http://osoyoo.com/picture/2023003000/user_manual.pdf
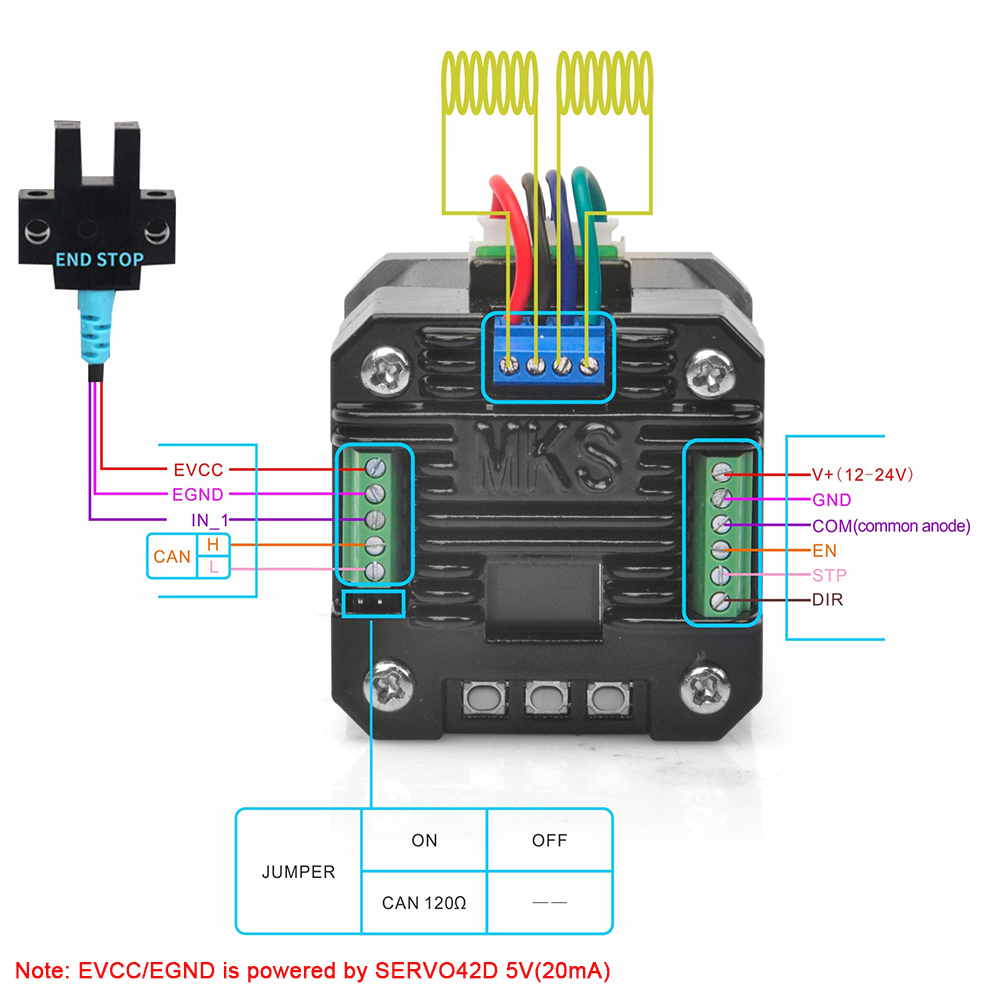
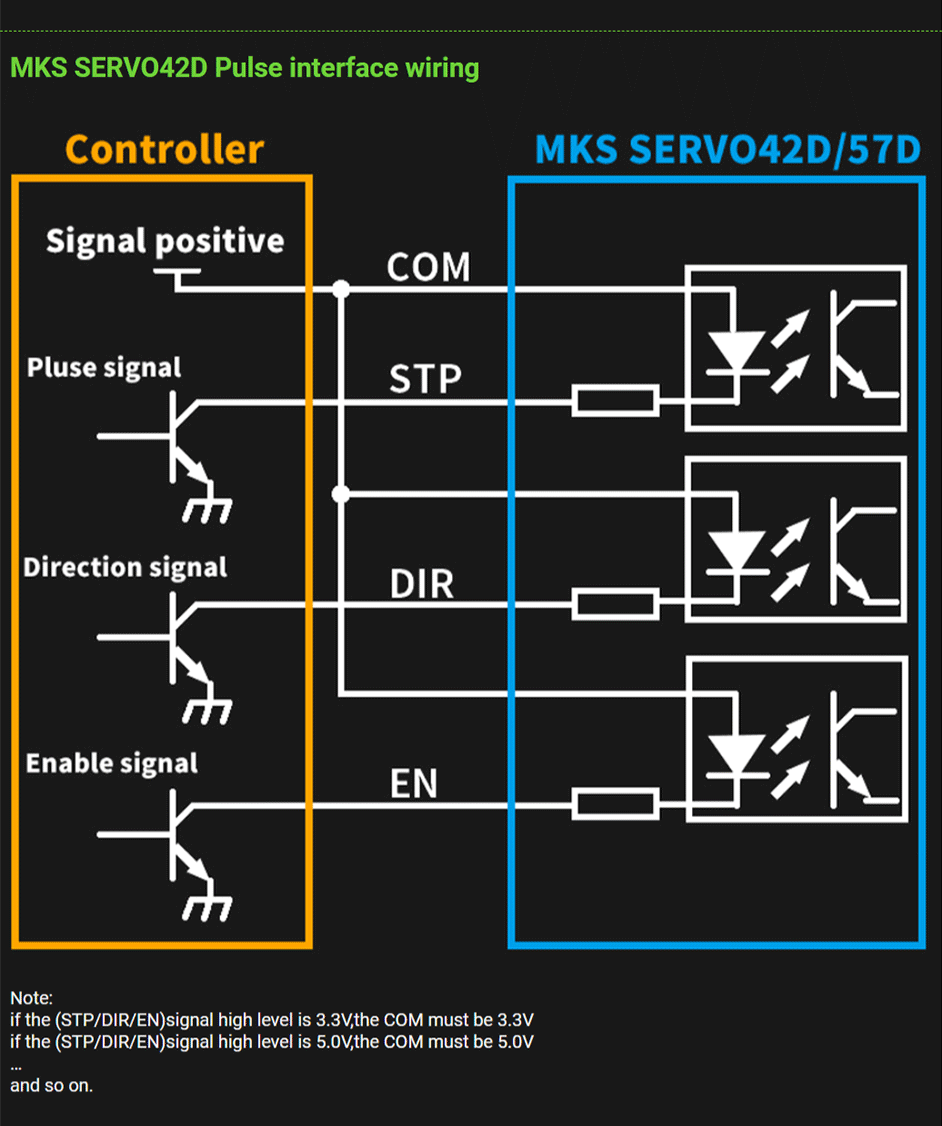
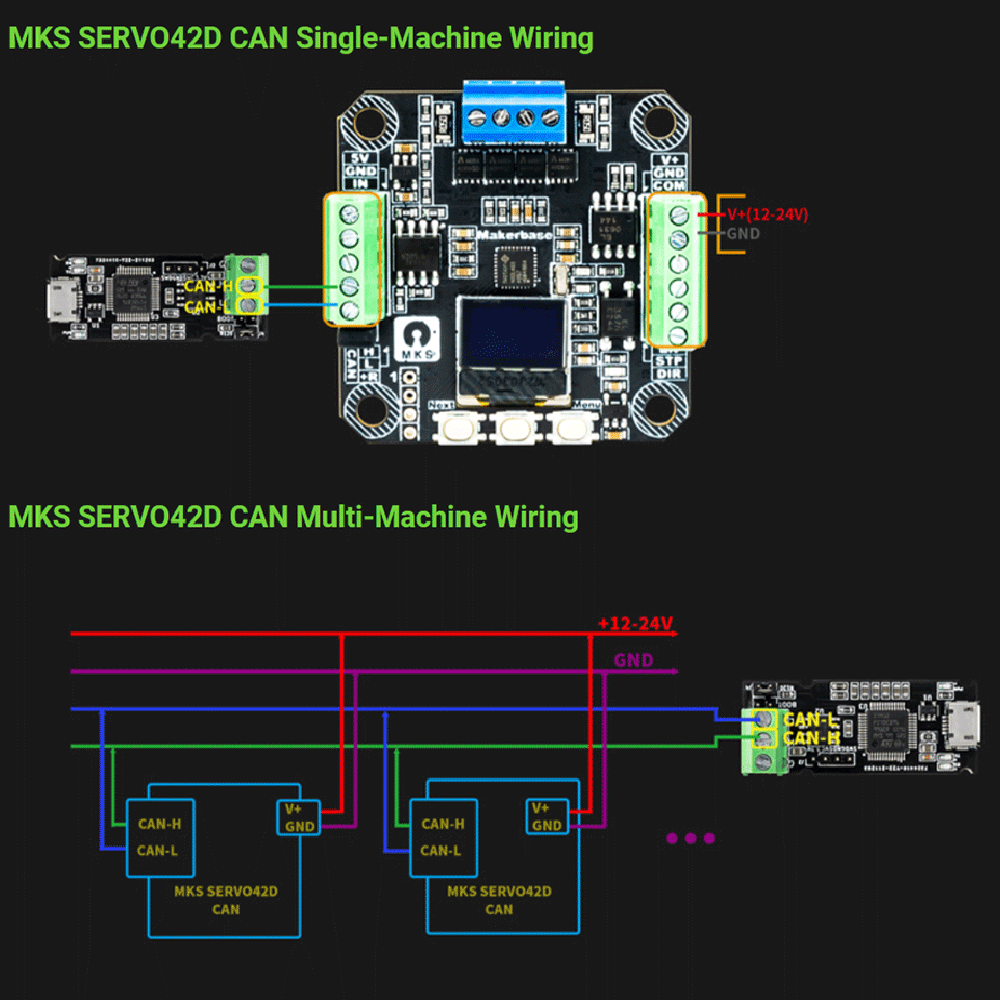
Interface
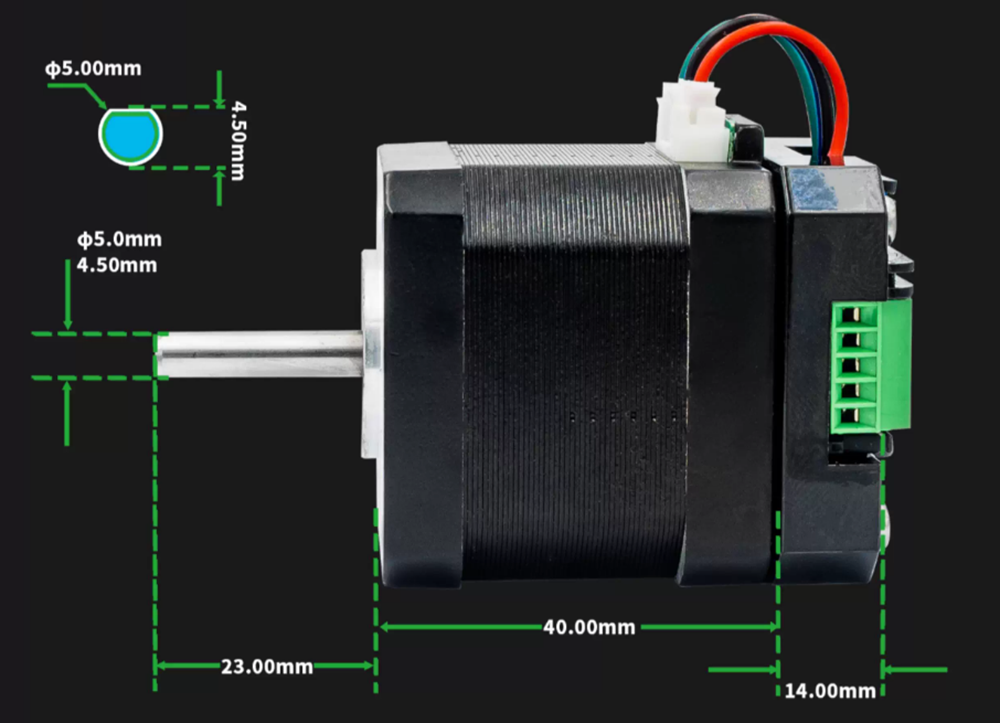
Size
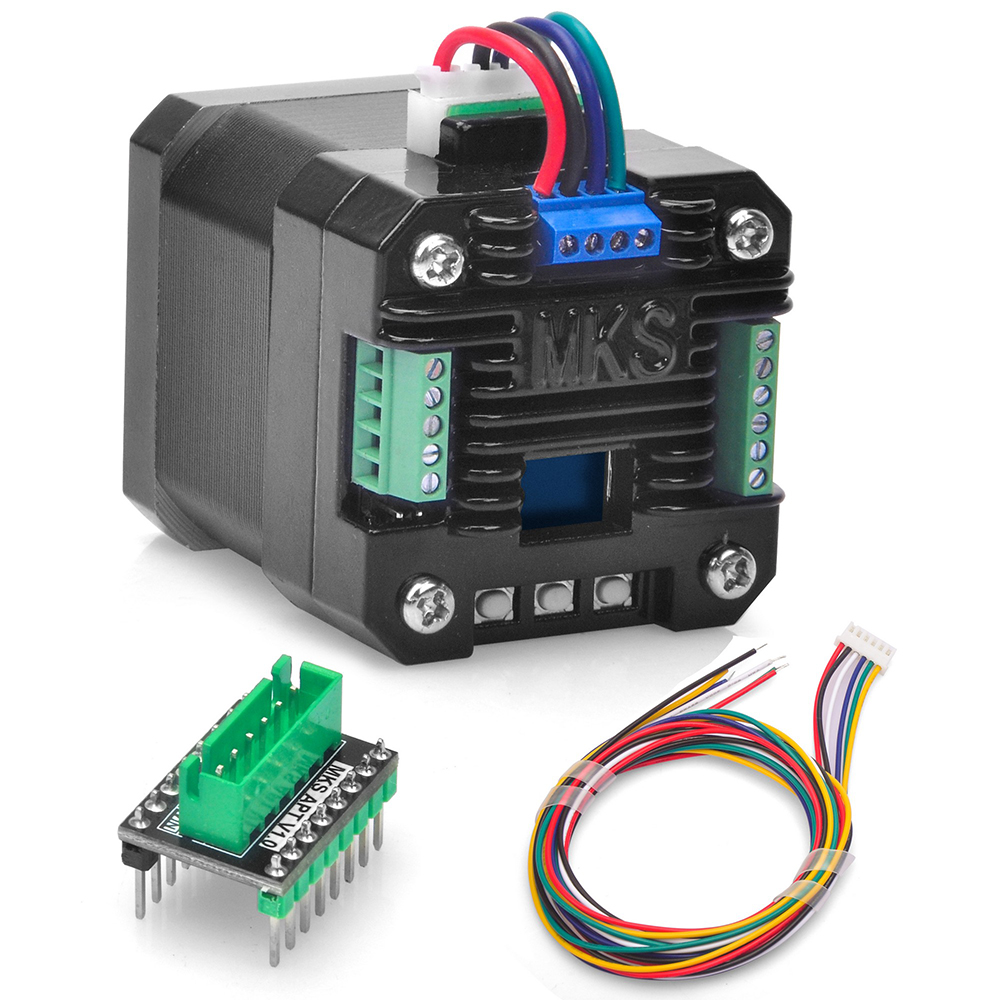
Package includes
1x MKS SERVO42D_CAN MT (includes a 42-size stepper motor with 40 mm body length and an aluminum alloy housing)
1x XH2.54-6P, single-ended, tinned leads (5 mm stripped) Cable, 100 cm length
1x Mainboard adapter (breakout) board
FAQ
Q1: How can I reduce communication interference on the serial bus (RS485/CAN)?
A1: To minimize interference and ensure stable communication, the controller (host) and the motor must share a common ground (GND). In addition, RS485/CAN signals should be transmitted using shielded twisted-pair cables. Proper grounding and shielding significantly improve noise immunity, especially in electrically noisy industrial environments.
Q2: Why does the motor fail during initial calibration, and how can I fix it?
A2: The motor is powered by 24V, and in some cases, the initial calibration may fail under this voltage. You can resolve this issue using either of the following methods:
- Method 1: Temporarily switch the power supply to 12V to complete the calibration. After successful calibration, you can revert to 24V for normal operation.
- Method 2: When the screen displays “Press Next Key To Fixed,” press and hold the Next button for about 5 seconds until “reBoot..” appears. The motor will then restart and complete the calibration process.









