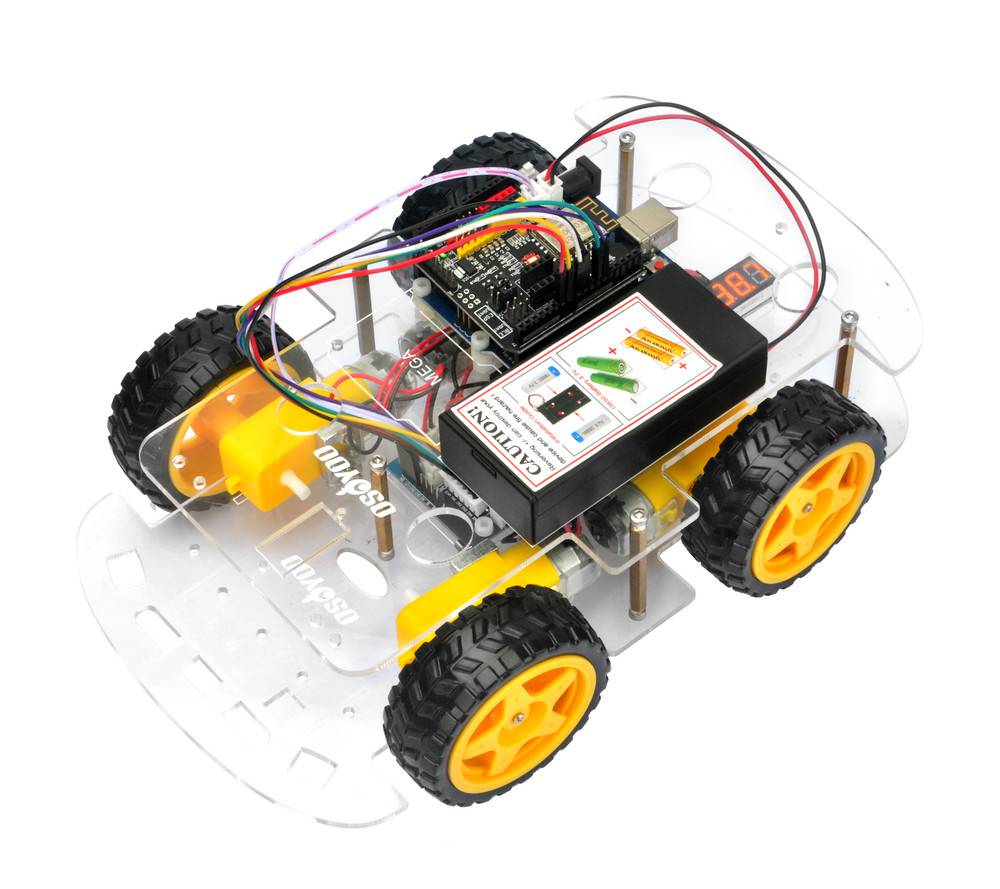
In dieser Lektion der “Hello World”-Version werden wir das wichtigste Gerüst im Smart Car installieren und das Auto so programmieren, dass es einige einfache Bewegungen ausführt. Wenn Sie die Testbewegung dieser Lektion bestanden haben, bedeutet dies, dass die Platine, der Spannungsmesser, das Motorsteuerungsmodul, die Motoren, die Batterien, das Chassis und die Kabelverbindungen zwischen diesen Teilen gut funktionieren.
Da die Experimente in den folgenden Lektionen alle auf der Grundlage von Lektion eins durchgeführt werden, ist es sehr wichtig, die Installation und den Beispielcode in dieser Lektion ordnungsgemäß zu testen.
Teile und Geräte
Nein.
Bild
Gerät
Quatität
Zubehör
Link
1
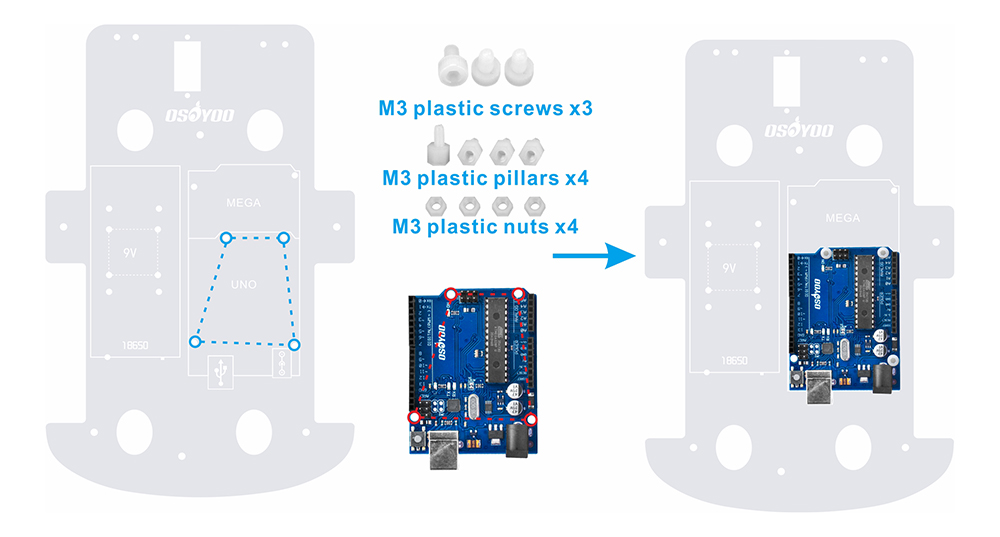
OSOYOO basic board
1
M3 Kunststoffschraube x 3
M3 Kunststoffmuttern x 4
M3 Kunststoffstützen x 4
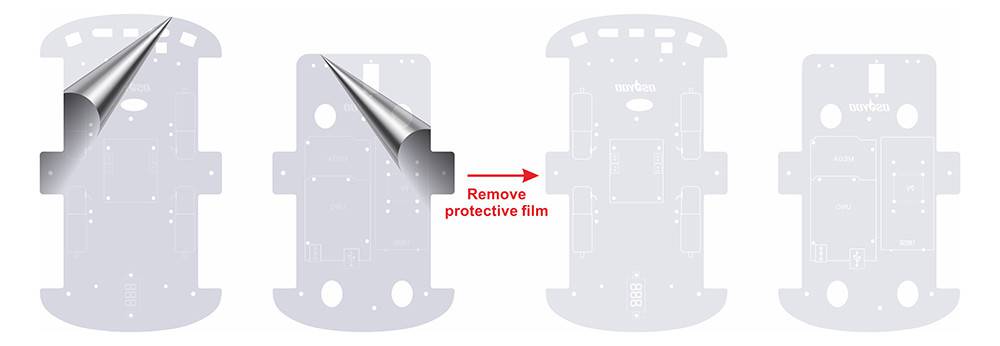
1) Entfernen Sie die Schutzfolie am oberen und unteren Fahrkorbchassis (Jedes Fahrzeugchassis hat eine Schutzfolie)
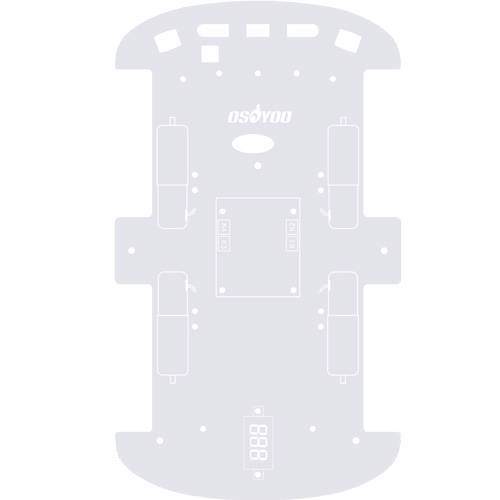
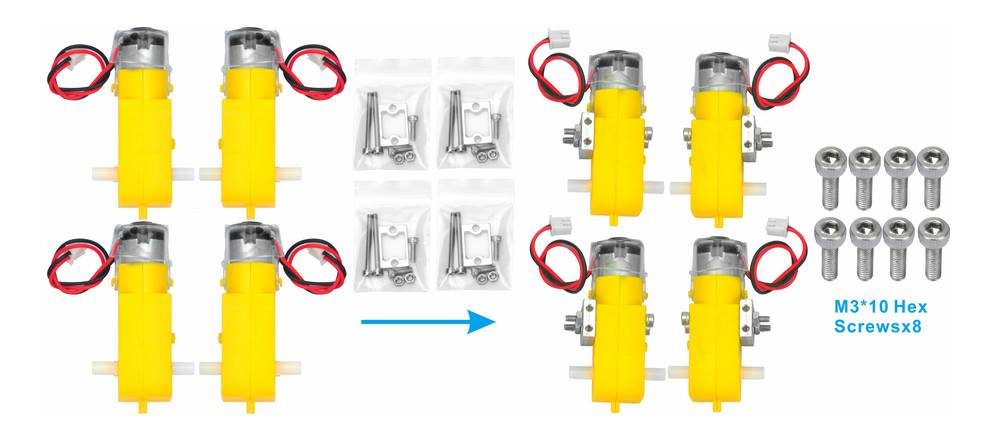
2) 4 Motoren mit Metall-Motorhaltern wie folgt befestigen (Bitte überprüfen Sie die Motorausrichtung, bevor Sie die Motorhalterungen aus Metall installieren.)
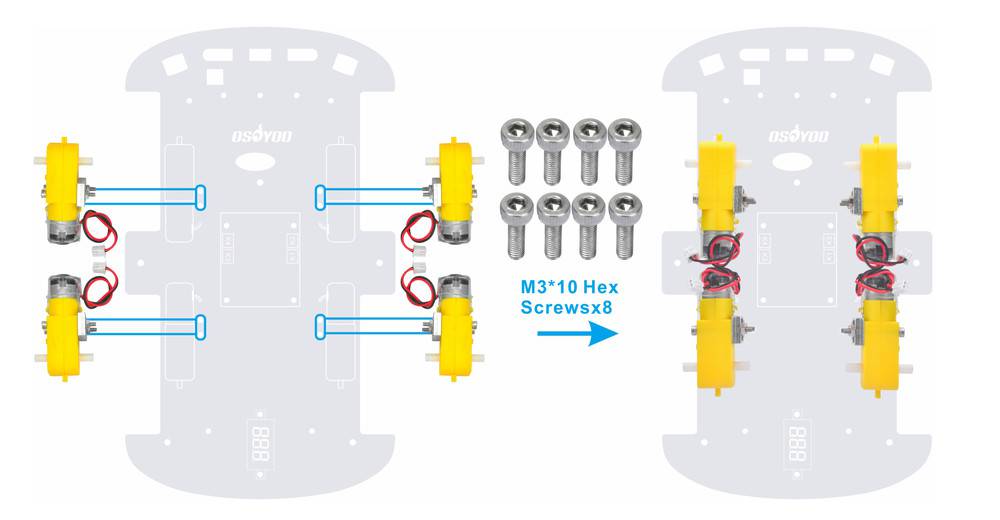
3) Befestigen Sie die 4 Motoren mit M3*10 Sechskantschrauben mit einem Sechskantschraubendreher am unteren Fahrkorbchassis. (Die Schrauben für diesen Schritt befinden sich in der Verpackung des Motorhalters aus Metall.)
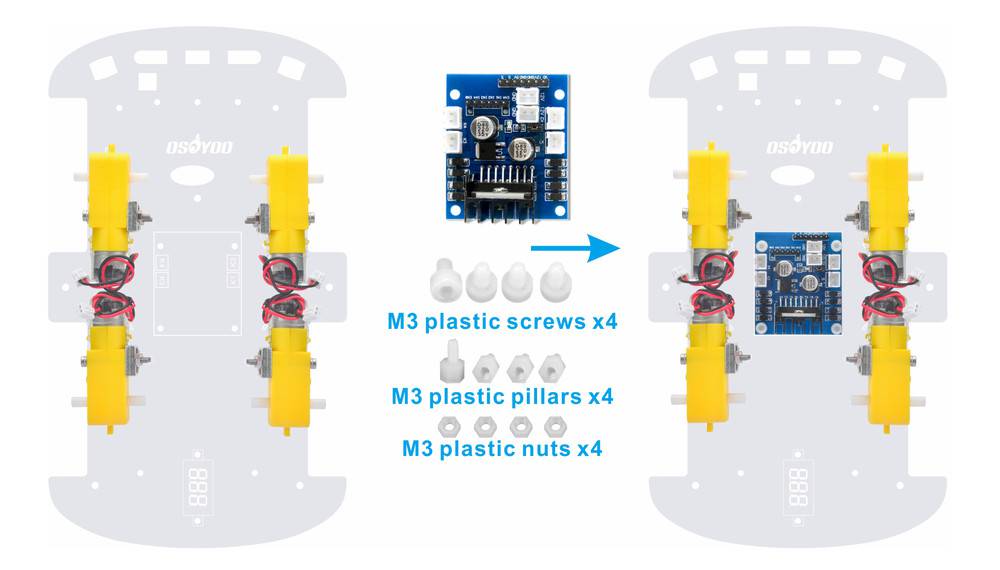
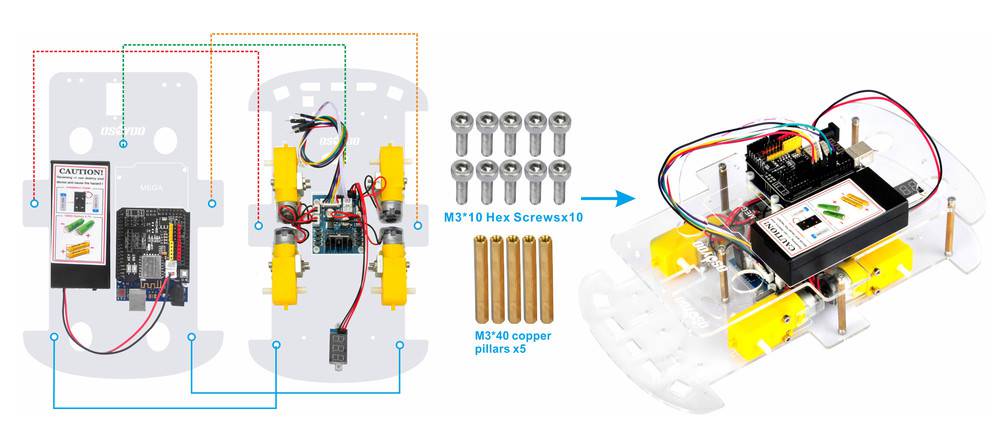
4) Montieren Sie das OSOYOO MODEL X Motortreibermodul mit 4 Stück M3 Kunststoffschrauben, Kunststoffsäulen und Kunststoffmutter am unteren Fahrzeugrahmen. (Bitte stellen Sie sicher, dass Sie das OSOYOO MODEL X Motortreibermodul in der richtigen Richtung installieren.)
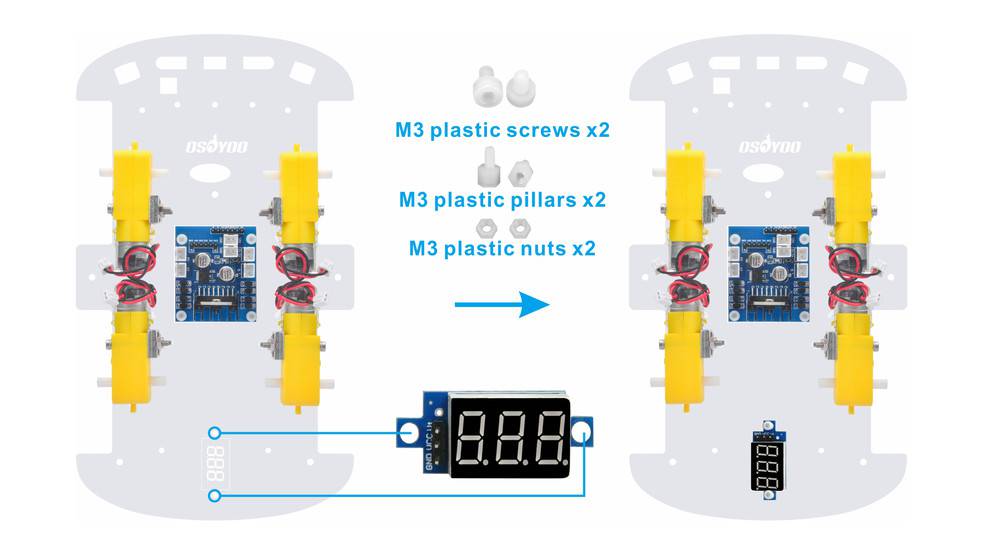
5) Montieren Sie den Spannungsmesser mit 2 Stück M3-Kunststoffschrauben, Kunststoffsäulen und Kunststoffmuttern auf dem Fahrgestell des Fahrzeugs.
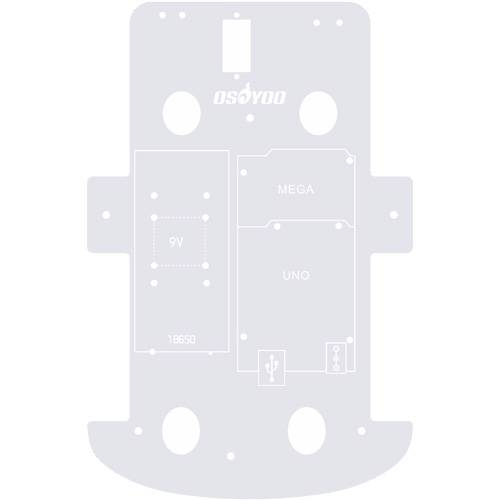
6) Befestigen Sie die OSOYOO-Grundplatine mit 4 Stück M3-Kunststoffschrauben, Kunststoffstützen und Kunststoffmuttern am oberen Fahrzeugrahmen. (Bitte installieren Sie das Brett an der Seite mit dem Druck)
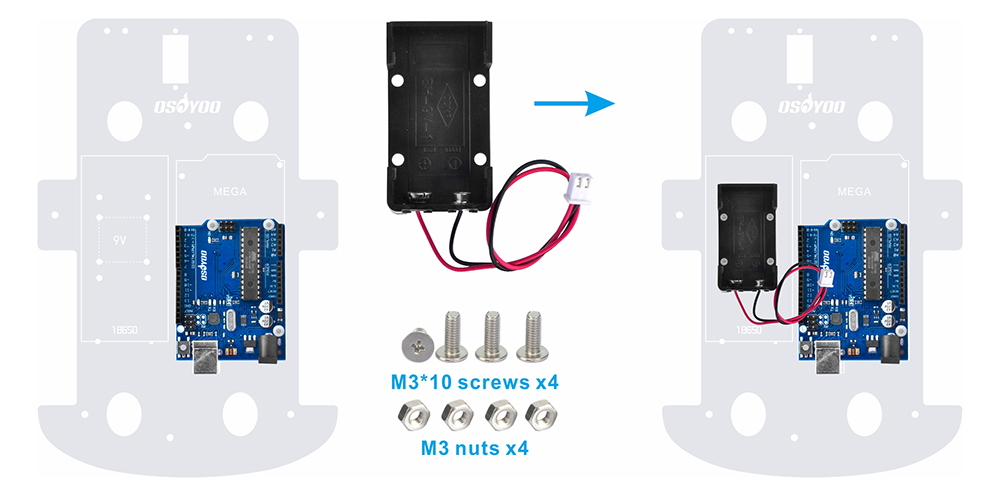
7) Es gibt zwei Arten von Roboter-Auto-Set für Sie zu wählen, zu kaufen. Die eine ist mit 2 Batterie-Box (18650 Batterie-Box und 9V Batterie-Box), und die andere ist mit 1 Paar 18650 Batterien und 1 Stück Ladegerät für 18650. Wir empfehlen die Verwendung von 18650er Batterien als Stromquelle. Wenn Sie eine 9V-Batterie als Stromquelle verwenden möchten, verwenden Sie bitte eine wiederaufladbare 9V-Batterie. Verwenden Sie keine Kohlenstoff-Zink-Batterie, da diese nicht genug Strom für das Roboterauto liefern kann..
A) Befestigen Sie diese Battery Box mit 4 Stück M3 x 10 Schrauben und M3 Muttern am oberen Chassis.
B) Bitte montieren Sie diese Batteriebox mit 4 Stück M3 x 10 Schrauben und M3 Muttern am oberen Chassis. (dies sind die gleichen wie Schrauben und Muttern für 18650 Batteriekasten. Wenn Sie kein 9V-Batteriegehäuse erhalten, ignorieren Sie bitte diesen Schritt).
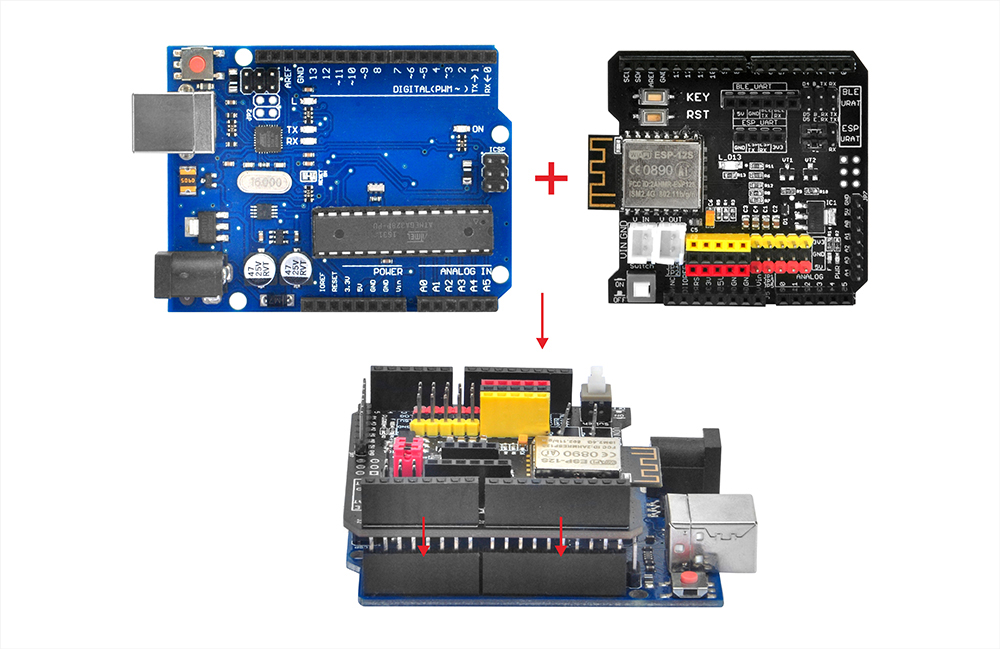
7) OSOYOO Uart WIFI shield V1.3 auf die Platine stecken
Verbindungen
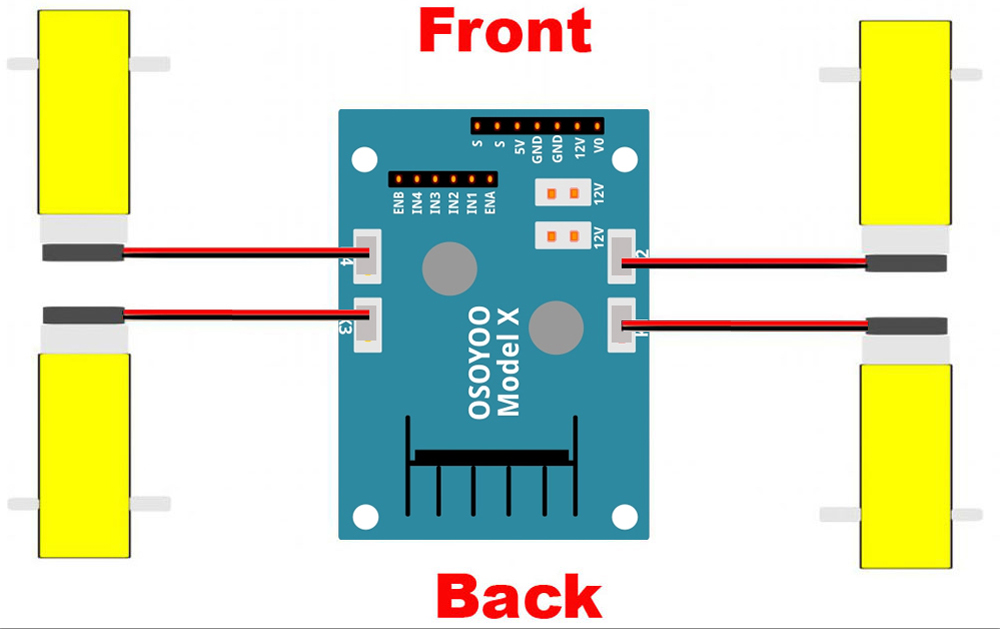
1)Schließen Sie 4 Motoren an die OSOYOO MODEL X Motortreibermodule K1 bis K4 gemäß der folgenden Grafik an:
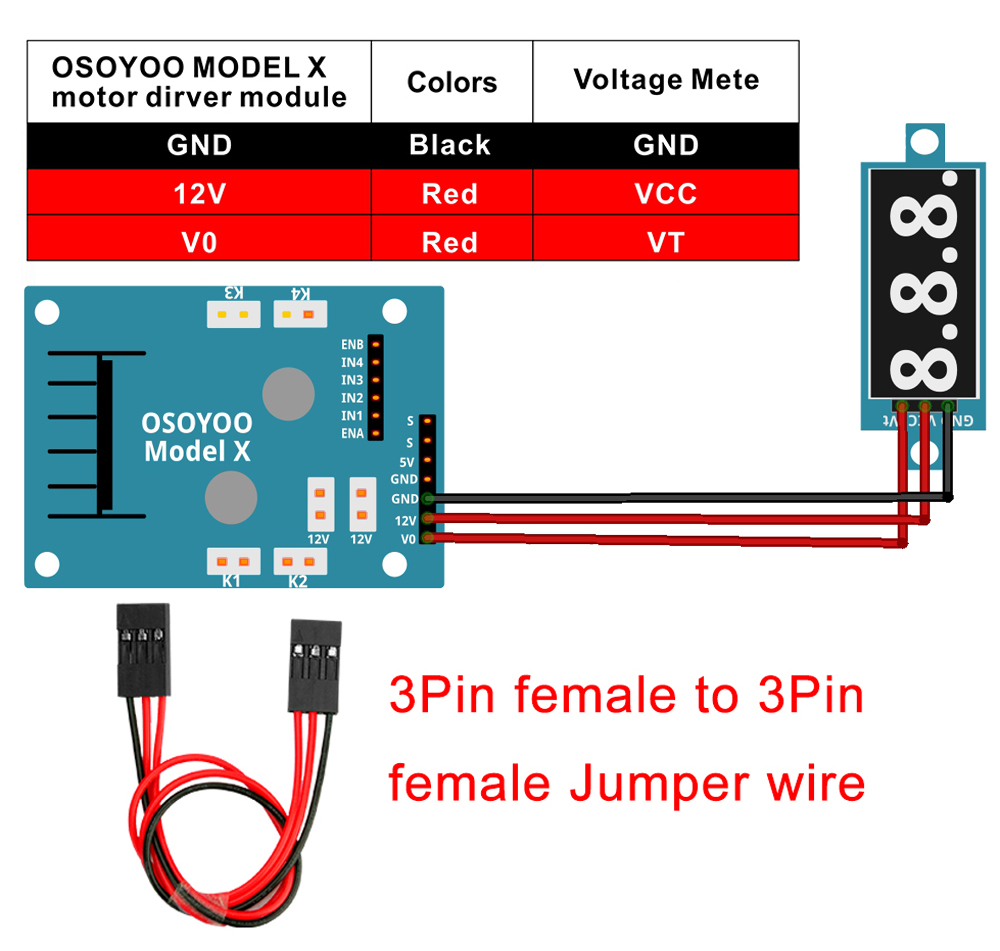
2)Verbinden Sie das Spannungsmessgerät mit dem OSOYOO MODEL X Motortreibermodul mit einer 3-poligen Buchse auf eine Buchse, wie im folgenden Anschlussplan dargestellt
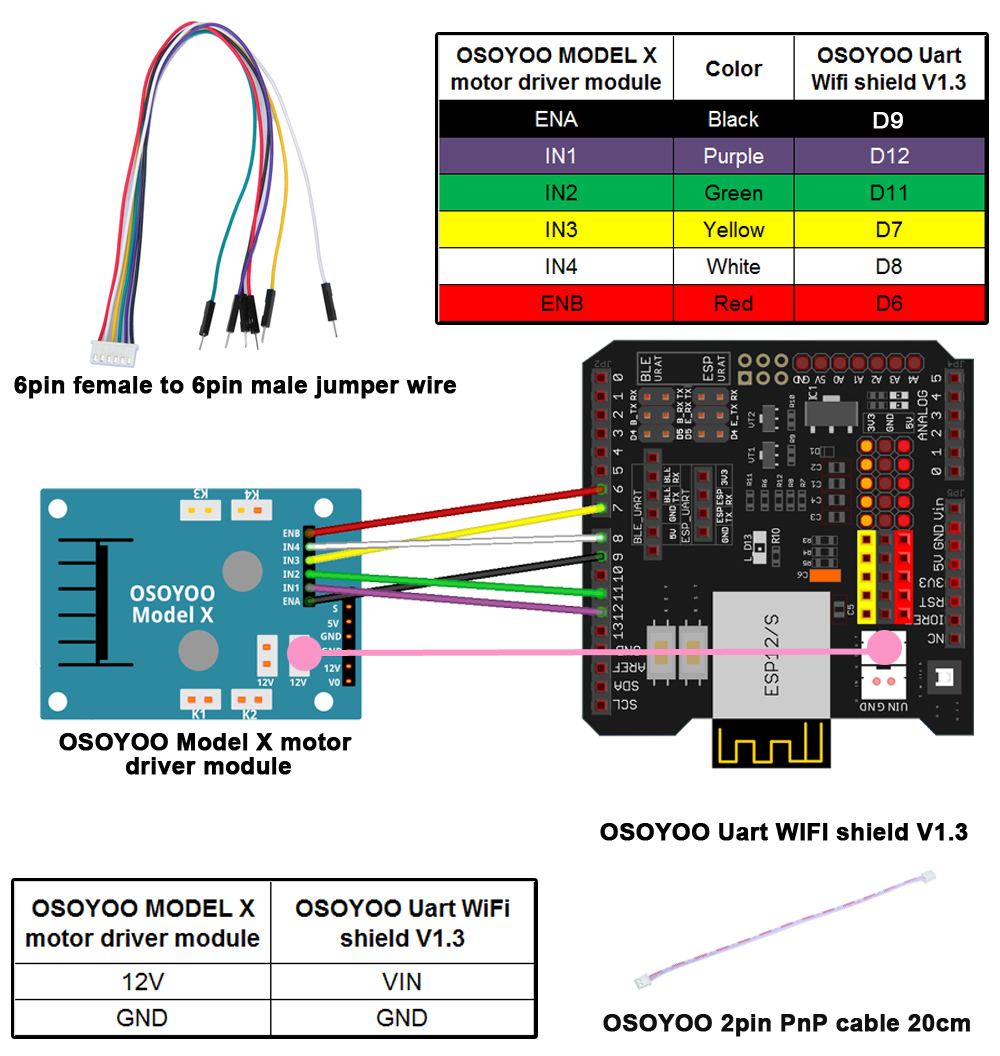
3)Verbinden Sie die 6 Steuerpins des OSOYOO MODEL X Motortreibermoduls mit dem OSOYOO Uart WiFi Shield V1.3 D6, D7, D8, D9, D11, D12 mit einer 6poligen Stecker-zu-6poligen Buchsenbrücke und die 12V-GND-Buchse mit der VIN-GND-Buchse mit dem OSOYOO 2poligen PnP-Kabel 20cm wie in der folgenden Grafik dargestellt:
Achtung:
Wenn Sie diesen 6-poligen Stecker in die 6-polige Buchse des Model X einstecken/entfernen, halten Sie bitte den Kunststoff-Stifthalter fest, um den Vorgang durchzuführen. Ziehen Sie niemals an den Drähten, um den Stecker aus der Buchse zu ziehen, sonst werden die Drähte beschädigt.
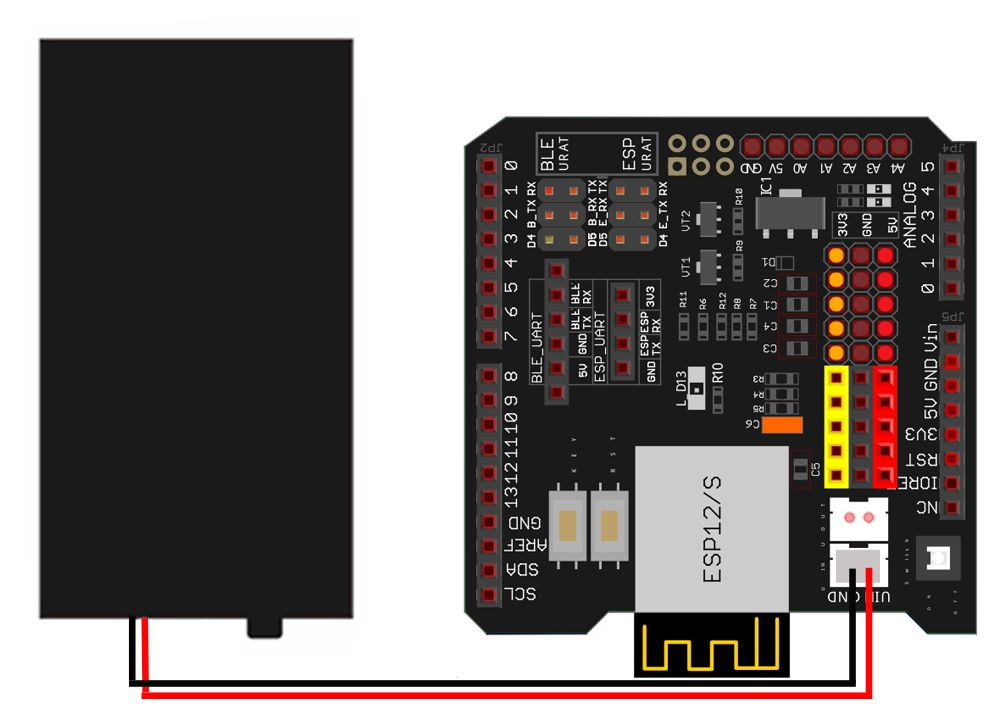
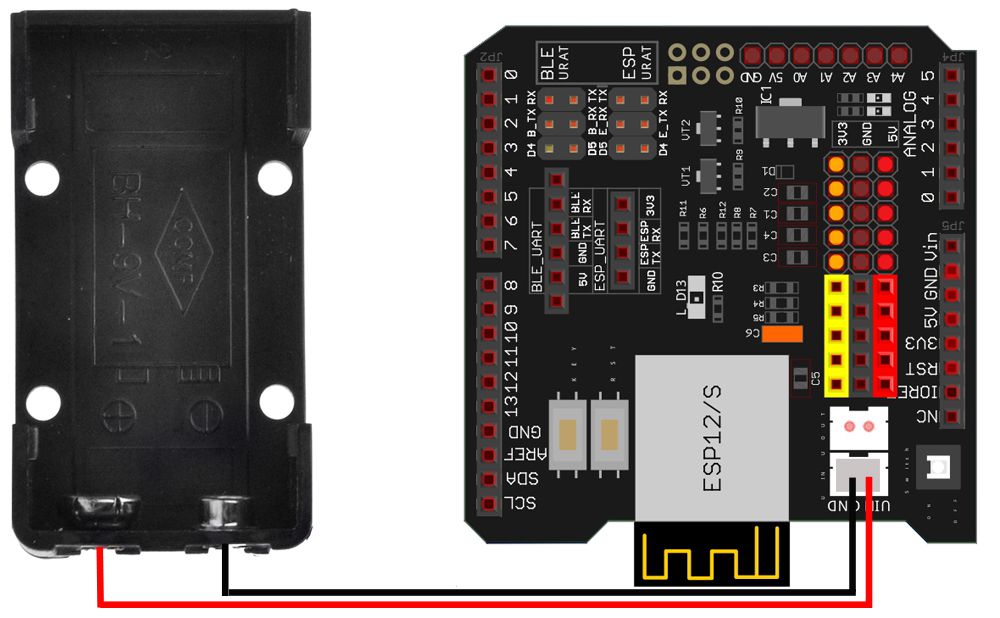
4) Verbinden Sie die Batteriebox (Batteriebox für 18650er Batterien oder für 9V-Batterien) mit der VIN-GND-Buchse des OSOYOO Uart WiFi Shield V1.3 gemäß dem folgenden Anschlussplan
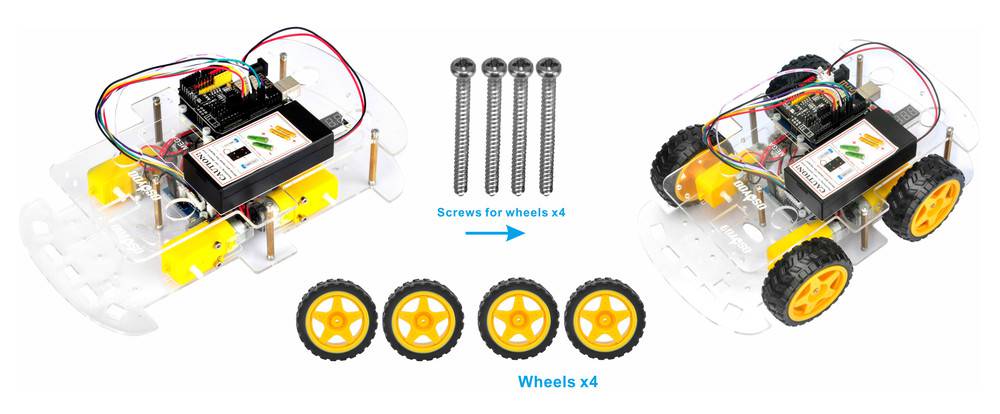
5) Verbinden Sie das obere Chassis mit dem unteren Chassis mit fünf Kupfersäulen und befestigen Sie die Kupfersäulen mit 10 Stück M3*10 Sechskantschrauben, dann installieren Sie 4 Räder auf den Motoren. (Bitte lösen Sie die Schrauben an den Rädern, wenn sich einige der Räder nicht bewegen)
Jetzt ist die Hardware-Installation fast abgeschlossen. Bevor wir 18650 Batterien in die Box installieren, müssen wir den Beispielcode in die Karte brennen.
Schritt 1: Installieren Sie die neueste DE (Wenn Sie eine IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt). IDE herunterladen von https://www.arduino.cc/en/Main/Software?setlang=en , installieren Sie dann die Software.
Schritt 2: Laden Sie den Beispielcode für Lektion eins herunter unter https://osoyoo.com/driver/v2smartcar-lesson1.zip , Entpacken Sie die heruntergeladene Zip-Datei smartcar-lesson1.zip, Sie werden einen Ordner namens v2smartcar-lesson1 sehen.
Schritt 3: Schließen Sie das Board mit einem USB-Kabel an den PC an, öffnen Sie die Arduino IDE -> klicken Sie auf file -> klicken Sie auf Open -> wählen Sie den Code “v2smartcar-lesson1.ino” im Ordner smartcar-lesson1, laden Sie den Code in das Board.
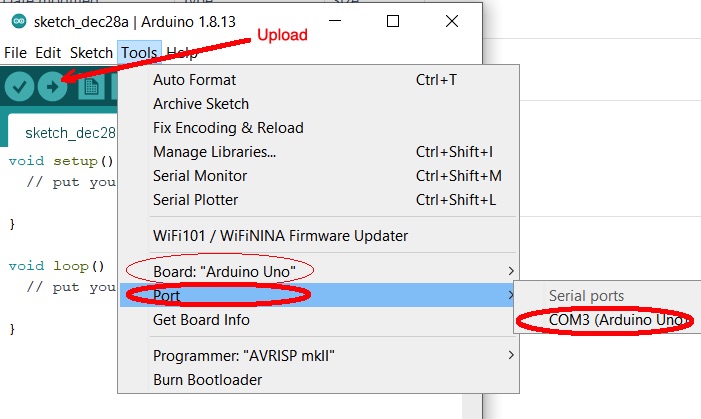
Schritt 4: Wählen Sie die entsprechende Karte/Port für Ihr Projekt, laden Sie die Skizze auf die Karte hoch.
Prüfung:
Hinweis:
1) Empfehlen Sie 18650-Batterien, da diese Batterien das Auto reibungslos laufen lassen können.
2) Die 18650er-Batterien, die wir im Unterricht verwendet haben, sind etwa 65 mm (2,56 Zoll) lang und haben keine interne Schutzschaltung.
3) Überprüfen Sie die Anweisungen auf der Verpackung und stellen Sie sicher, dass die Polarität korrekt ist, sonst kann Ihr Gerät zerstört werden und es besteht Brandgefahr.
Bitte legen Sie Ihre 18650er Akkus in die Batteriebox für 18650 nach folgender Anleitung ein:
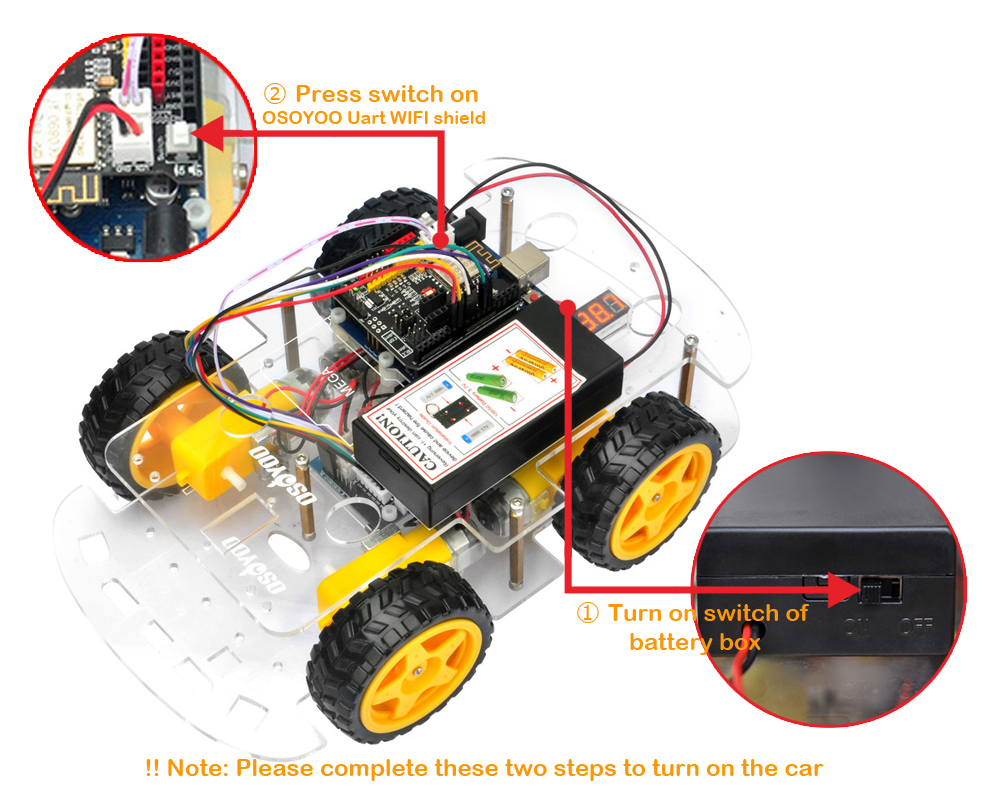
Trennen Sie das Roboterauto vom PC, legen Sie die Batterie in die Batteriebox. Wenn Sie das Auto auf den Boden stellen und den Schalter am OSOYOO Uart WIFI Schild V1.3 und den Schalter am Batteriekasten einschalten, wenn Sie den Batteriekasten für 18650 installieren, sollte das Auto 2 Sekunden vorwärts fahren, dann 2 Sekunden rückwärts fahren, dann 2 Sekunden links abbiegen, dann 2 Sekunden rechts abbiegen, dann anhalten. (Wenn das Auto nicht wie oben beschrieben fährt, sollten Sie die Kabelverbindung und die Batteriespannung (muss über 7,2 V liegen) überprüfen.)
Troubleshooting
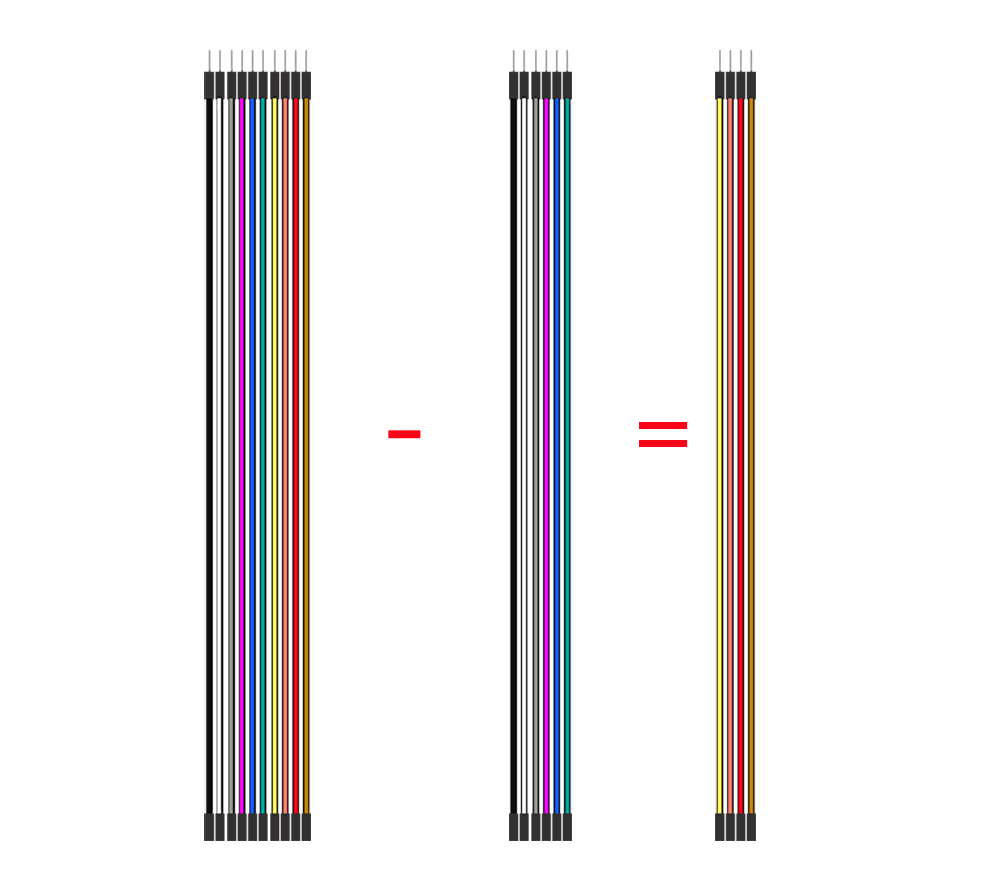
Wenn Sie nach dem Ausführen des Codes aus Lektion 1 feststellen, dass die Räder auf einer Seite nicht drehen oder die Räder auf einer Seite nur vorwärts, aber nicht rückwärts oder nur rückwärts, aber nicht vorwärts fahren können, liegt das Problem wahrscheinlich an einem losen oder gebrochenen Draht im 6-poligen Kabel, das mit der Model X-Platine verbunden ist.
Hier ist die Lösung:
Schritt 1: Trennen Sie das 6-polige Kabel, das die Model X-Platine und die Arduino-Platine verbindet.
Schritt 2: Suchen Sie sechs (6) einzelne Ersatz-Jumperkabel (weiblich-männlich) aus Ihrem Kit (jede Farbe ist in Ordnung).
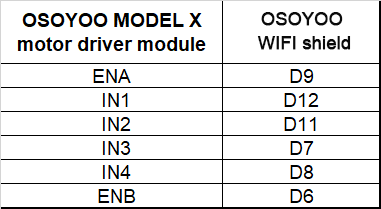
Schritt 3: Verwenden Sie diese sechs einzelnen Jumperkabel, um die Model X-Pins (ENA, IN1, IN2, IN3, IN4, ENB) manuell wieder mit den entsprechenden Pins auf dem Arduino gemäß der vorherigen Model X-Verdrahtungsübersicht zu verbinden.
Schritt 4: Retest the Lesson 1 code to see if the issue is resolved. If the problem still exists, you can send your problem detail to [email protected] and our tech support team will help you.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.







































Hi,
I connected everything per the tutorial and downloaded lesson 1 code, but car is not moving.
I got a email from [email protected] with a photo. Is it from you.
If not, please take a photo about the connections to my email address: [email protected].
Thanks!
The same is happening to me
Hi!
How can I reset from the fabric the robot car?
Thanks in advance.
I’m not quite sure what you mean. If you want to reset the robot, you can press the reset button on the motherboard; if you want to upload a different code to the robot, you may need to connect a computer and upload the new code through the Arduino IDE。。。
hello, i need help with the program upload to the car. i keep getting error stating the upload failed. i have checked all wiring and don’t see any mistakes. any suggestions? (email:[email protected])
Please paste the error and send to my email address: [email protected].
Please help me.
I recently bought model-3 robot car kit for Arduino.
I have completed first stage hardware build and am trying to load lesson #1 sketch.
I am using a sony Vaio laptop with windows 10 Pro.I did the following steps
Arduino IDE downloaded
Lesson 1 .zip downloaded
Lesson 1 sketch loads correctly to the IDE
I connected USB with the robot car. It looks OK with a solid green and flashing blue LED
in the IDE TOOLs I select Arduino UNO
In IDE TOOLS I selected port COM3 (I only have choice of COM3 or COM4)
In IDE SKETCH I upload
…at the bottom of the IDE screen I get at first green progress bar and information on number of bytes memory used.
The error message generated is here..
Arduino: 1.8.19 (Windows 10), Board: “Arduino Uno”
Sketch uses 1442 bytes (4%) of program storage space. Maximum is 32256 bytes.
Global variables use 9 bytes (0%) of dynamic memory, leaving 2039 bytes for local variables. Maximum is 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xd4
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xd4
Problem uploading to board. See https://support.arduino.cc/hc/en-us/sections/360003198300 for suggestions.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
I then went to the recommended resource to fix the problem and did the following
Windows device manager
PORTS – I looked here and Arduino is not identified
Universal Serial Bus Controllers – I looked here and Arduino is not identified
The layout of the information is not the same as shown in the website here “https://support.arduino.cc/hc/en-us/articles/4407830972050-Find-and-stop-process-blocking-a-port”
1. Please confirm whether the LED on board flash or not, when you press the reset button. If this led flash, it means the boot loader works well.
2. Please install the lastest version of IDE : https://www.arduino.cc/en/Main/Software?setlang=en
3. Please open IDE, and then choose processor: ATmega328p(Old bootloader)
4. Please confirm you don’t install bluetooth module
5. Try to use USB2.0 port to upload the code
6. please use other USB cable and try again
7. Uninstall the CH340 driver and then install new driver from http://www.osoyoo.com/driver/smarthome/7/CH340_341.rar
Hi! I recently set up the car with my son, and we have completed Lesson 1. When we tested…the car only moved backwards, and occasionally forward. But, if I pick it up and look at the wheels, it begins to execute the correct code, and tries to forward, reverse, turn left, then right. It’s almost like the pressure on the wheels affect how it is running. Any help would be greatly appreciated! Thanks!
Hi, please check the voltage of the battery or recharge the battery and try it again.
What’s more, there are different directions of the wheels, please install the wheels in correct direction.
If all doesn’t work, please take a video and send to my email address: [email protected]
Thanks and best regards!
Arduino in picture example in these instructions are not up to date and COM3 port doesn’t exist or is not supported anymore also there are errors in the scratch here:
/usr/local/bin/arduino-cli compile –fqbn arduino:avr:uno –libraries /home/builder/opt/libraries/latest –build-cache-path /tmp –output-dir /tmp/072211837/build –build-path /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167 /tmp/072211837/sketch_jul24a
Compiling sketch…
/home/builder/.arduino15/packages/arduino/tools/avr-gcc/7.3.0-atmel3.6.1-arduino7/bin/avr-g++ -c -g -Os -w -std=gnu++11 -fpermissive -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -Wno-error=narrowing -MMD -flto -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10607 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/cores/arduino -I/home/builder/.arduino15/packages/arduino/hardware/avr/1.8.4/variants/standard /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp -o /tmp/arduino-build-0E46E6BC8ECE79FAF22DBF7BA49EC167/sketch/sketch_jul24a.ino.cpp.o
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void setup()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:89:6: error: redefinition of ‘void setup()’
void setup()
^~~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:5:6: note: ‘void setup()’ previously defined here
void setup() {
^~~~~
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino: In function ‘void loop()’:
/tmp/072211837/sketch_jul24a/v2smartcar-lesson1.ino:112:6: error: redefinition of ‘void loop()’
void loop(){
^~~~
/tmp/072211837/sketch_jul24a/sketch_jul24a.ino:9:6: note: ‘void loop()’ previously defined here
void loop() {
^~~~
Error during build: exit status 1
Do you mean you can’t select coms port when you upload the code of lesson1?
Or when you select the correct coms, there is a error.
If you can’t find the coms port, please follow the video to install the driver: https://www.youtube.com/watch?v=mDrV8b1E6zI
Hi,
We have followed lesson 1 and built the car and uploaded the code however the car does not move. The voltmeter does not light up – we have checked all the connection. Any help would be greatly appreciated!!
I have checked the video, and find that you have lost a 2Pin PnP cable from Wifi Uart to Model X: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson1/1.jpg. so that there is no power to Model X.
Please try it again.
Elaine
i put the code in and only 2 moters were moveing then nothing happend
Please take photos about your connection of the robot and send to my email address: [email protected]
Arduino:1.8.19 (Windows 10), Tarjeta:”Arduino Uno”
v2smartcar-lesson2:13:2: error: ‘IRrecv’ does not name a type
IRrecv IR(IR_PIN); // IRrecv object IR get code from IR remoter
^~~~~~
v2smartcar-lesson2:14:2: error: ‘decode_results’ does not name a type
decode_results IRresults;
^~~~~~~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void do_IR_Tick()’:
v2smartcar-lesson2:95:6: error: ‘IR’ was not declared in this scope
if(IR.decode(&IRresults))
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:95:6: note: suggested alternative: ‘ISR’
if(IR.decode(&IRresults))
^~
ISR
v2smartcar-lesson2:95:17: error: ‘IRresults’ was not declared in this scope
if(IR.decode(&IRresults))
^~~~~~~~~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino: In function ‘void setup()’:
v2smartcar-lesson2:168:3: error: ‘IR’ was not declared in this scope
IR.enableIRIn();
^~
C:\Users\PC\Desktop\ARDUINO\v2car-lesson2\v2smartcar-lesson2\v2smartcar-lesson2.ino:168:3: note: suggested alternative: ‘ISR’
IR.enableIRIn();
^~
ISR
exit status 1
‘IRrecv’ does not name a type
Este informe podría contener más información con
“Mostrar salida detallada durante la compilación”
opción habilitada en Archivo -> Preferencias.
Hello,
Started to use Model N0. 20190005000 kit. Lesson 1 the car is going backwards first, then forward, left and right. Could you please help with this issue – For advance it is going backwards and for reverse it is going forward.
What is the set_Motorspeed used for in the arduino code?
Why is the car humming when I turn it on?
My name is Quan. I purchased your robot from Amazon, and I have encountered a few issues with the coding. I would like my robot to use the ultrasonic sensor to detect obstacles. When it encounters obstacles, I want it to turn right or left to avoid them and continue moving. However, I am having difficulty with the coding. I hope you can assist me.
I’ve sent you the email about that.
After putting the code in only the left two motors run the ones on the right don’t do anything but if I switch their connections I get the opposite effect. Is it a dodgy motors driver module
Please change the wires from Model X to Wifi shield. If the issue occurs again, please contact with my email: [email protected]
Hi,
When running the program :
go_Advance();//Forward ==> OK
go_Back();//Reverse ==> Right back only
go_Left();//Turn left ==> Right forward only
go_Right();//Turn right ==> OK
stop_Stop();//Stop
I checked wire connection OK
I check PINS OK
Any idea please ?
Thanks a lot
It means that the left motors can’t go back. Please change the wires from Model X to Wifi shield, and exchange the right motors with left motors. If the issue accours again, please contact with my email: [email protected]
Hi, how much weight can it hold/carry?
This is an acrylic robot car for learning how to use Arduino to code. If you want to a robot to carry heavy weight, please visit our product: https://osoyoo.com/2022/07/05/v2-metal-chassis-mecanum-wheel-robotic-for-arduino-mega2560-introduction-model-2021006600/
I am returning to this robot. I have completed Lesson 1. When I place robot on ground and switch on, it makes one circle, in reverse, to the right. All connections have been checked and are correct.
Any suggestions?
Regards, James.
based on your description, the 6pin cable connecting model_x board to wifi shield might have problem. please use 6 single pc wire to replace that 6pin cable and try again.