El kit de robot con ruedas Mecanum OSOYOO FlexiRover es una plataforma de alto rendimiento y gran versatilidad diseñada para entusiastas de Raspberry Pi (mayores de 15 años) que ya tienen conocimientos básicos de ensamblaje robótico y programación. Este kit es compatible con Raspberry Pi 2, 3, 4 y la nueva Raspberry Pi 5. Ofrece una base sólida para construir robots personalizados, con énfasis en la flexibilidad, la durabilidad y la innovación. Incluye un potente sistema de motores, amplias opciones de expansión y una alta capacidad de carga, lo que lo hace ideal para proyectos robóticos avanzados. La placa Raspberry Pi no está incluida, pero el kit aporta todos los componentes necesarios para armar un chasis funcional. Viene con motores potentes, ruedas Mecanum y un chasis personalizable que lo convierten en una plataforma valiosa para multitud de aplicaciones. Diseñado pensando en los desarrolladores, el FlexiRover invita a explorar, innovar y convertir las ideas robóticas en realidad. Ya sea para educación, investigación o proyectos personales, el FlexiRover es la elección ideal para construir robots de alto rendimiento.
Características principales
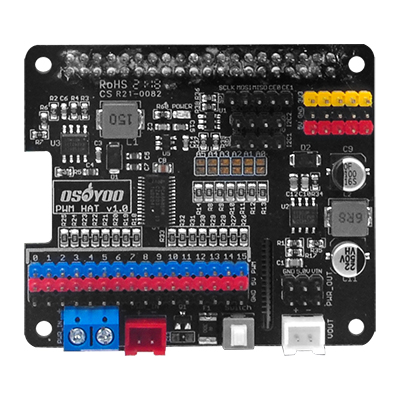
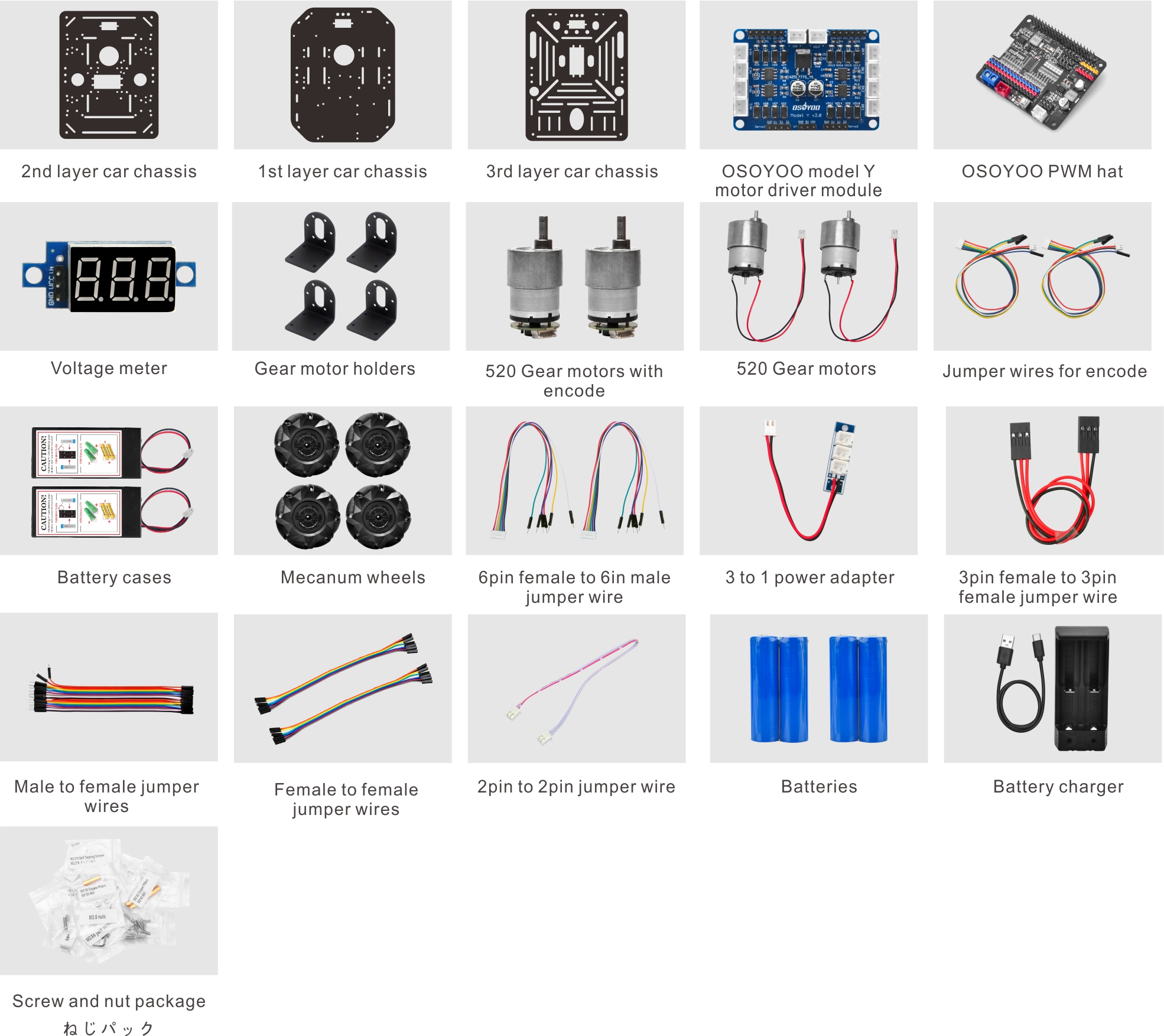
Amplia compatibilidad —- Diseñado para funcionar sin problemas con Raspberry Pi 2, 3, 4 y 5. La placa de expansión incluida amplía las capacidades de la Pi y soporta hasta 16 servomotores para aplicaciones robóticas avanzadas.
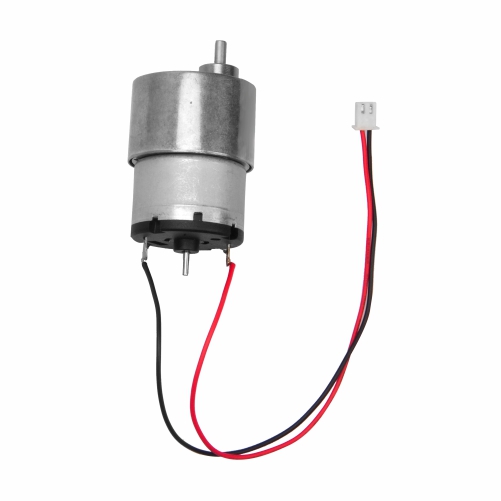
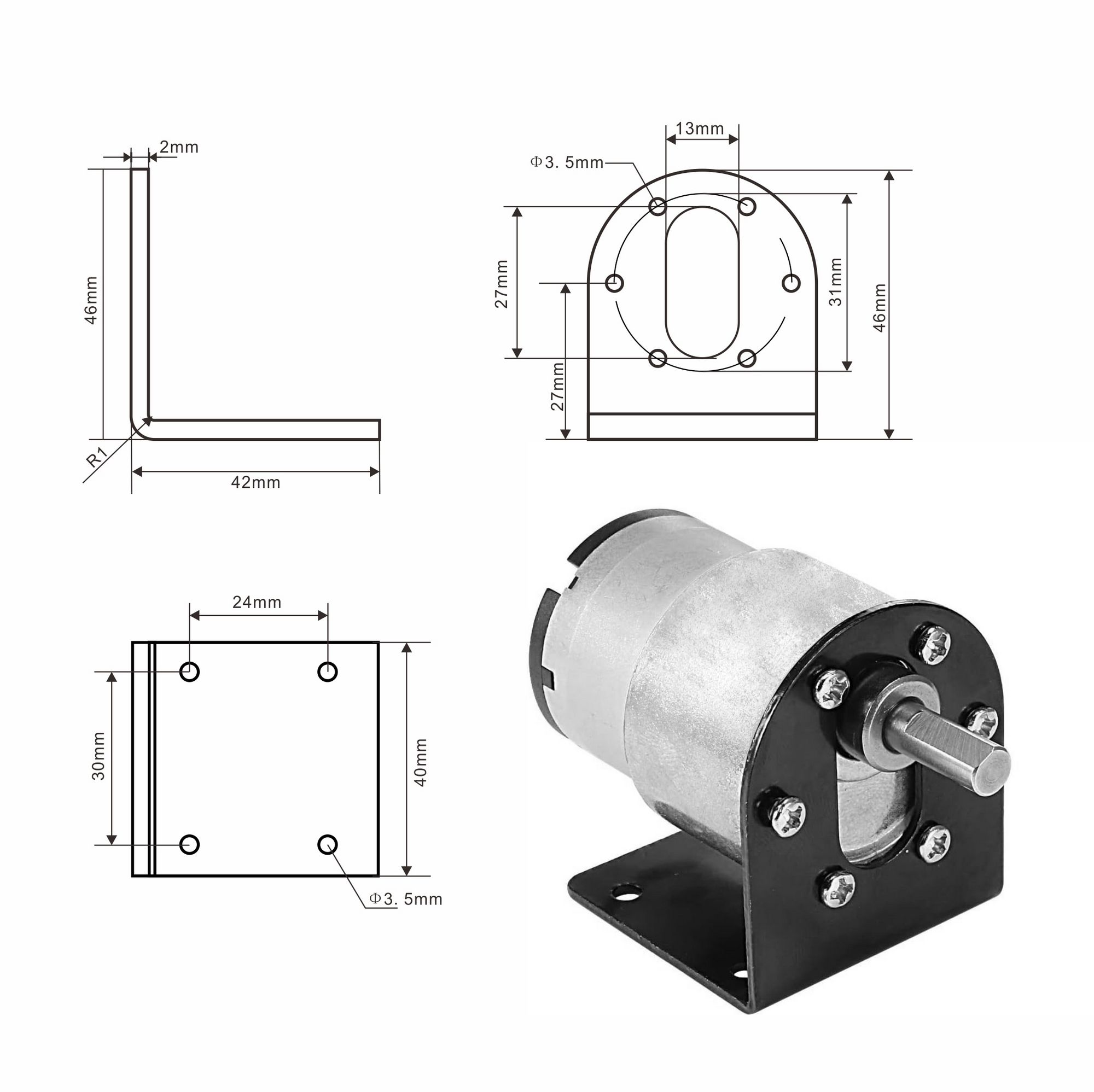
Motores 520 de alta calidad —- Incluye cuatro motores 520 para un funcionamiento suave, dos de los cuales llevan encoders para un control de movimiento preciso, esencial para la navegación y tareas avanzadas.
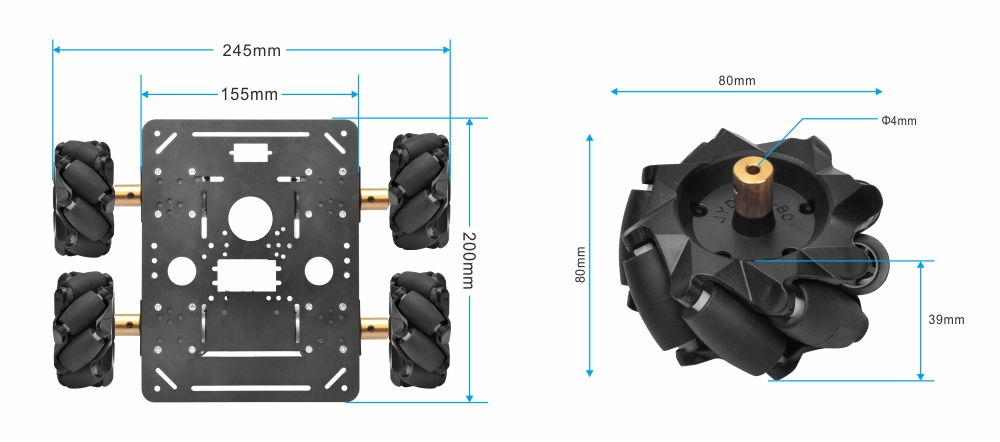
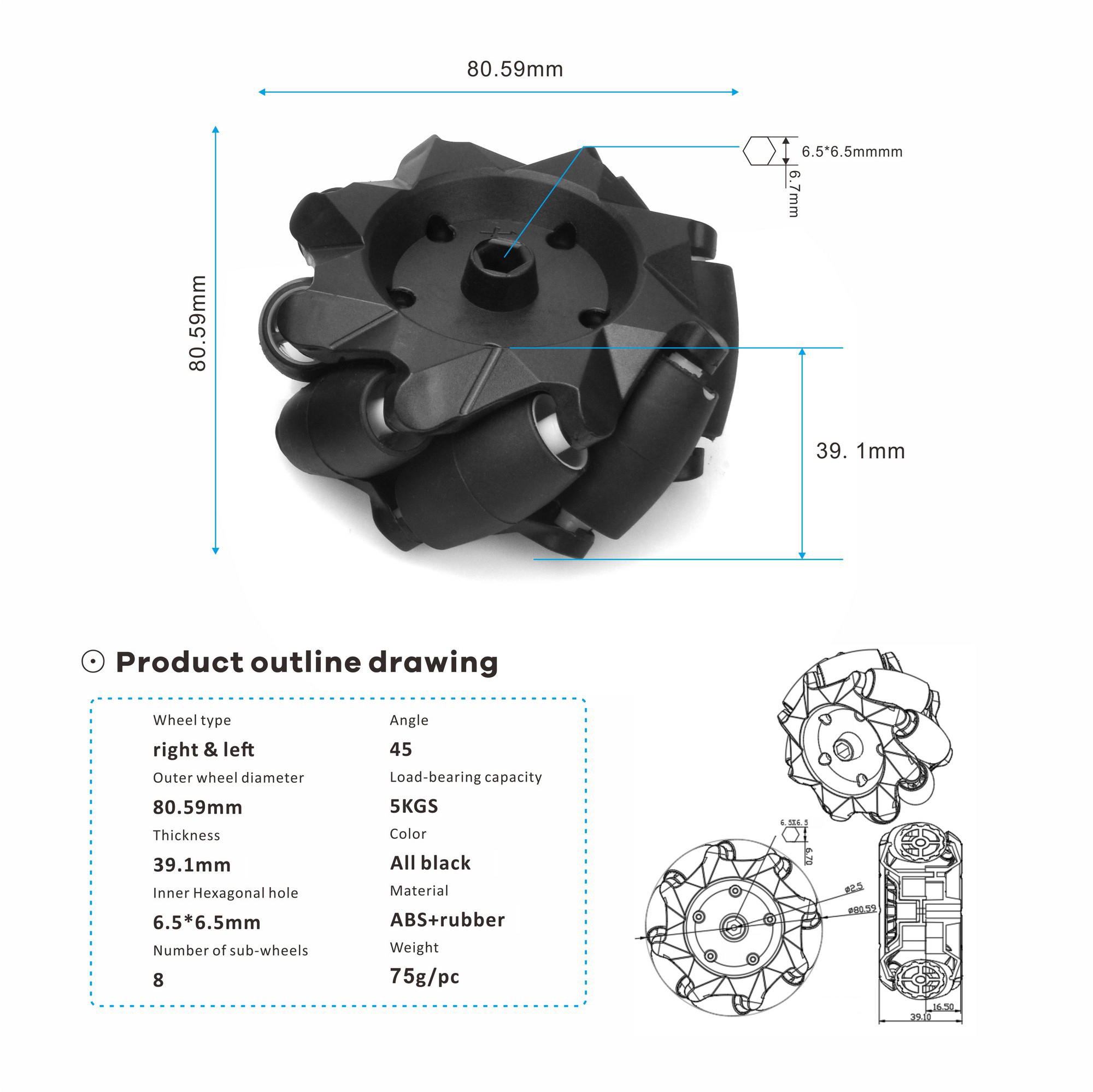
Ruedas Mecanum omnidireccionales —- Las cuatro ruedas Mecanum permiten el movimiento en todas las direcciones, ofreciendo una maniobrabilidad superior para el posicionamiento preciso y aplicaciones versátiles.
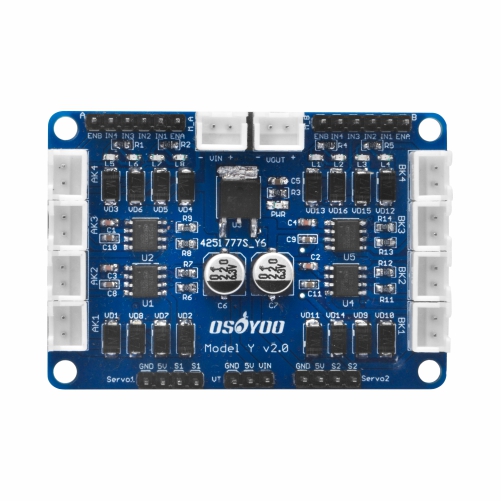
Driver de motores robusto —– El driver de motores OSOYOO Model Y admite cuatro canales de motor independientes, garantizando un rendimiento fiable bajo cargas elevadas.
Gestión de energía confiable —- Equipado con dos cajas de baterías con interruptor, el kit asegura una entrega de corriente estable incluso para las elevadas necesidades de la Raspberry Pi 5, e incluye baterías recargables y cargador.
Chasis personalizable —- El chasis con orificios pre-troquelados admite accesorios como sensores, brazos mecánicos y cámaras, lo que permite una gran personalización para distintos proyectos.
Diseño resistente —- Con capacidad para soportar hasta 2,5 kg, el FlexiRover ofrece una base sólida para el desarrollo robótico avanzado.
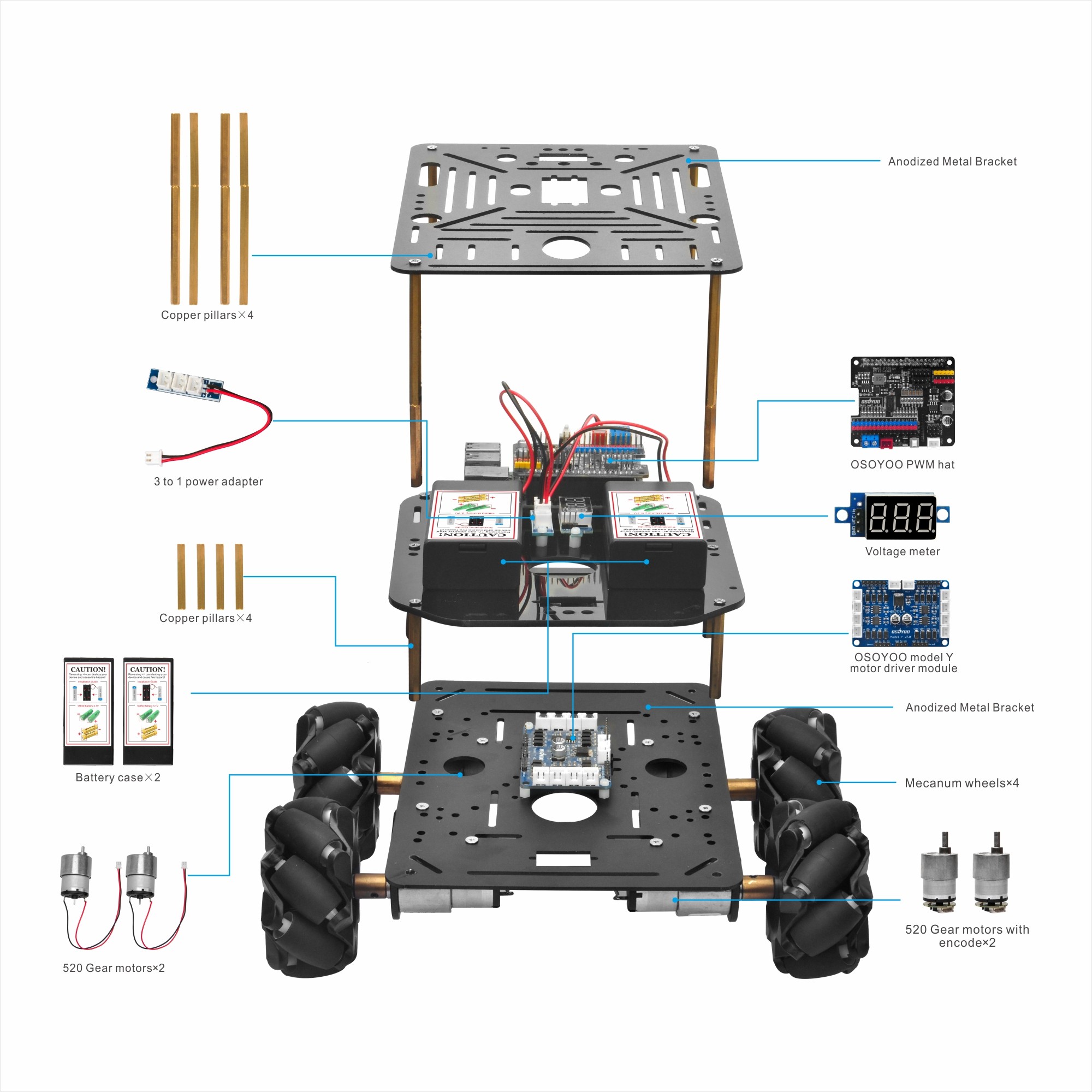
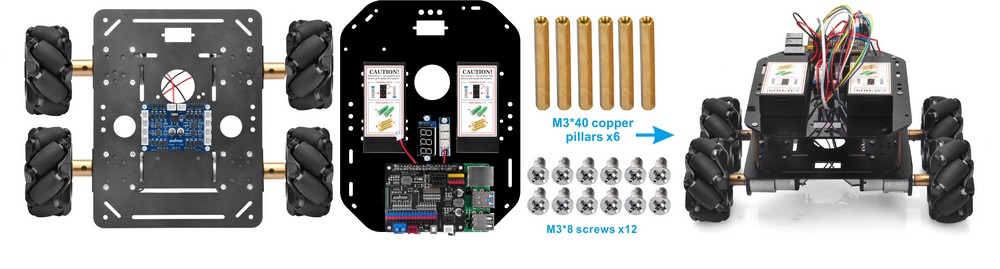
Incluye: 1 destornillador de ranura, 1 llave hexagonal, 60 tornillos M3*8, 12 juegos de tornillos de plástico M2.5 + separadores + tuercas, 4 separadores de cobre M3*65+6, 10 separadores de cobre M3*40, 30 tornillos M3*10 con tuercas, 4 tornillos M2.5*20 y 4 acoplamientos de motor
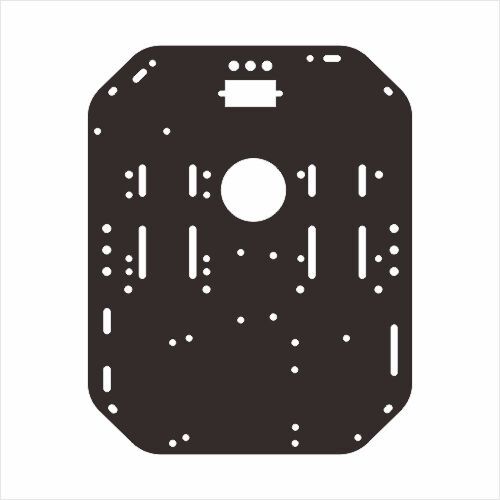
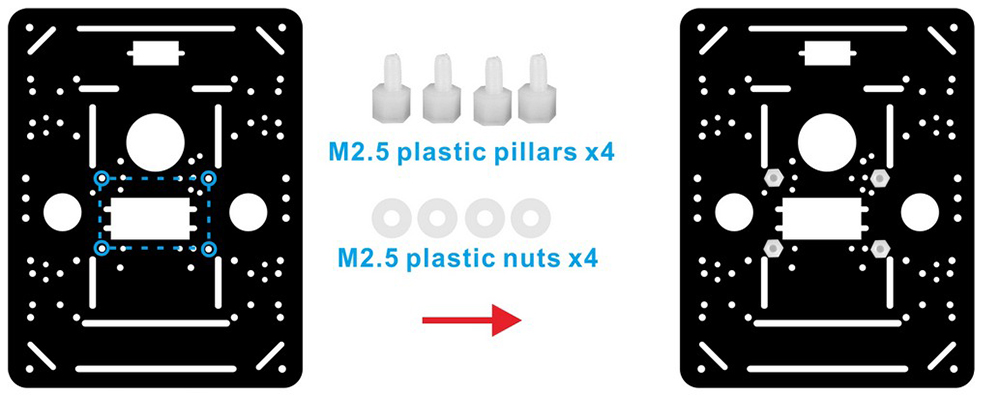
Paso 1. Instale primero 4 separadores de plástico M2.5 en el chasis metálico (1.ª capa), tal como se muestra en las imágenes siguientes. (Nota: Estos cuatro separadores son para el driver de motores OSOYOO Model Y. Instálelos antes que los motores, ya que después resultaría muy difícil colocarlos.):
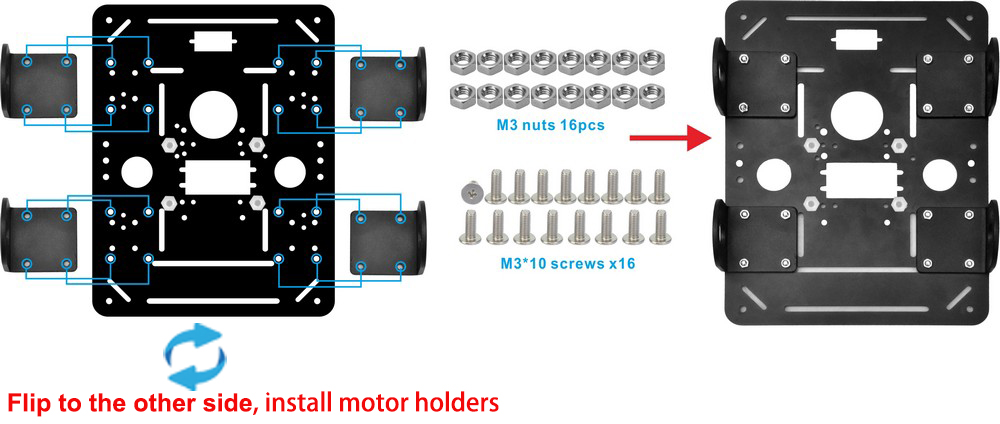
Paso 2. Dé la vuelta al chasis (1.ª capa) e instale los soportes del motor reductor con tornillos M3*10 y tuercas M3, tal como se muestra en las imágenes siguientes.
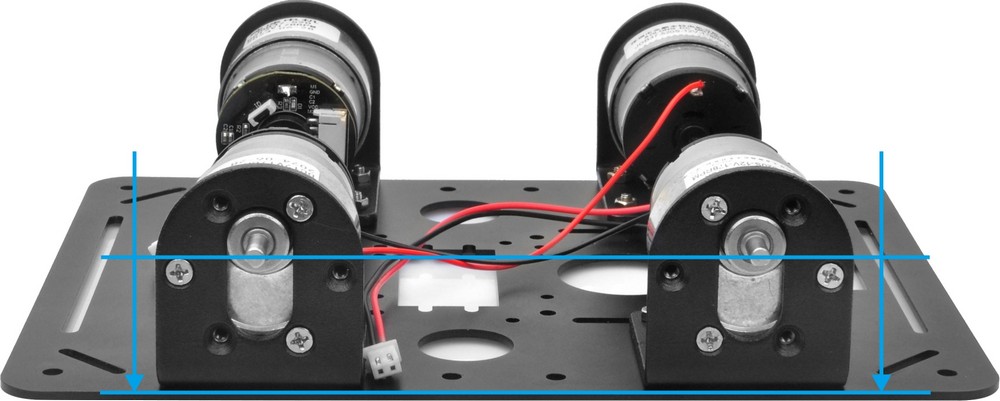
Nota: Asegúrese de que los 4 ejes de los motores queden alineados al mismo nivel.
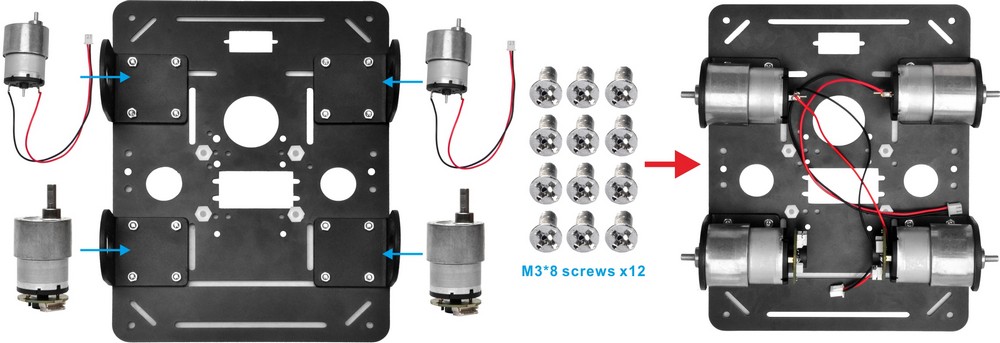
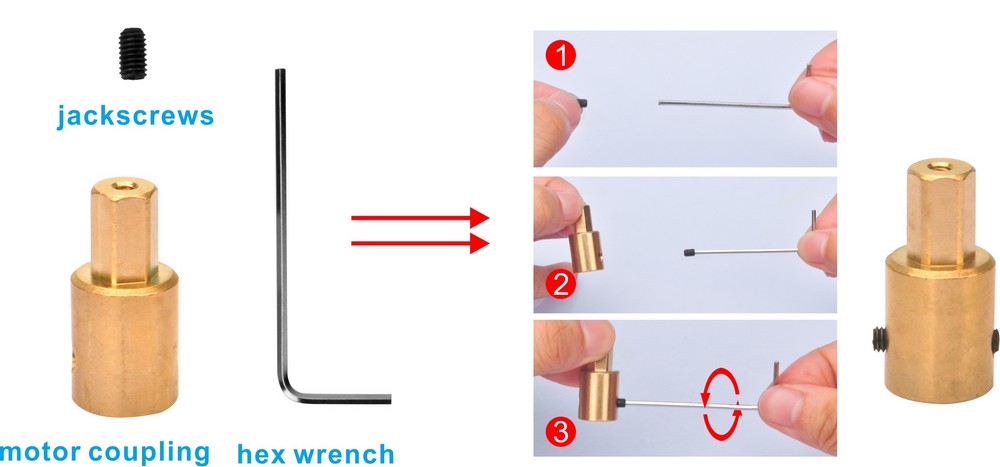
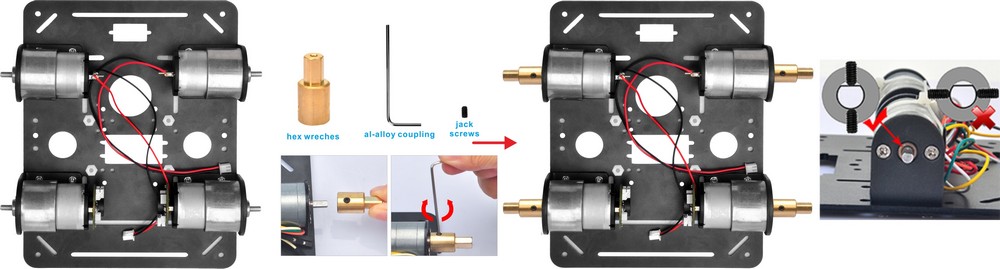
Paso 4. Instale los tornillos de presión en el acoplamiento de aluminio y apriételos bien para fijar el acoplamiento al motor, tal como se muestra en las imágenes. Nota: El eje del motor reductor 520 tiene una cara plana. Asegúrese de que uno de los tornillos de presión quede sobre esa cara plana y apriete ambos tornillos sobre el eje.
Paso 5. Instale las 4 ruedas Mecanum en el acoplamiento de aluminio con 4 tornillos M2.5*20, tal como se muestra en las imágenes siguientes:
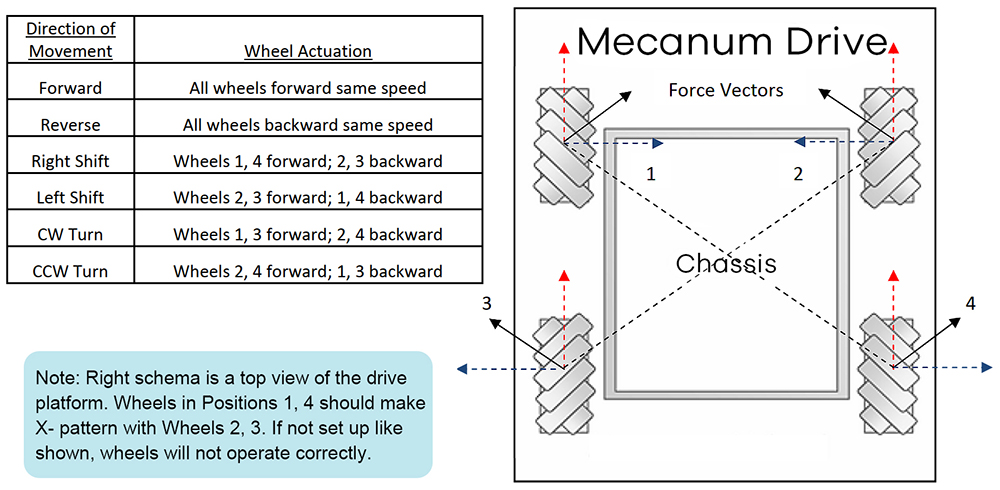
Nota: Existen dos tipos de ruedas Mecanum, izquierda y derecha; la diferencia está en la orientación de los rodillos. La configuración correcta exige que cada una de las cuatro ruedas se coloque tal como se indica a continuación, de forma que el eje de rotación del rodillo superior de cada rueda apunte hacia el centro del chasis. Tenga en cuenta que todo el análisis dinámico y el código preescrito se basan en esta configuración.
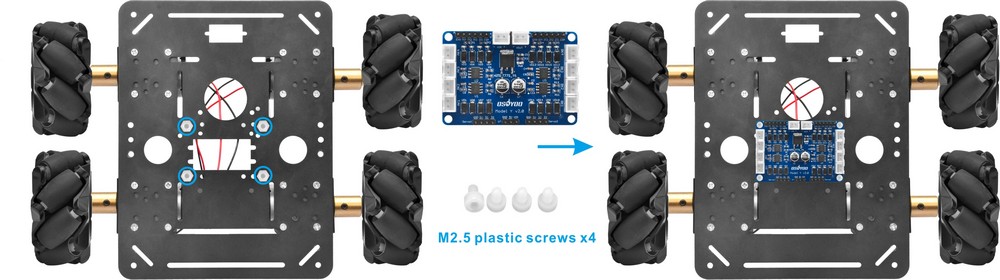
Paso 6. Fije el módulo driver de motores OSOYOO Model Y en el chasis (1.ª capa) con tornillos de plástico M2.5, tal como se muestra en las imágenes siguientes:
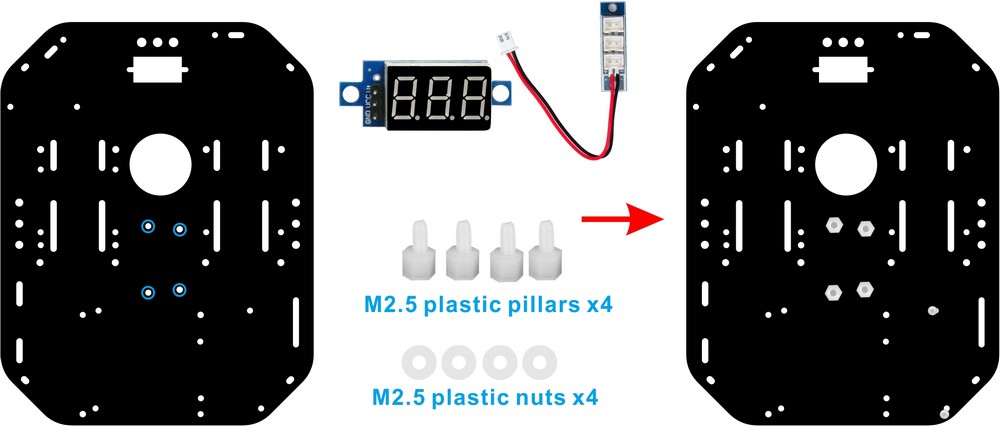
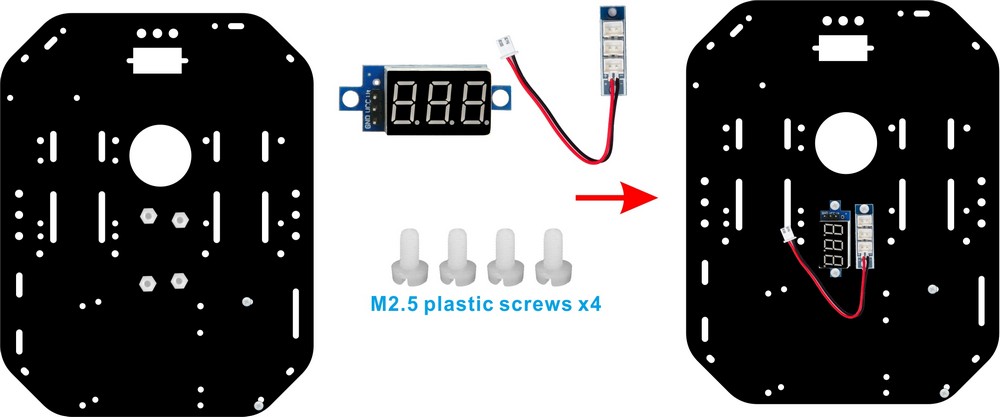
Paso 7. Instale 4 separadores y tuercas de plástico M2.5 en el chasis acrílico (2.ª capa) y luego fije el adaptador de alimentación 3 en 1 y el voltímetro con tornillos de plástico M2.5, tal como se muestra en las imágenes siguientes:
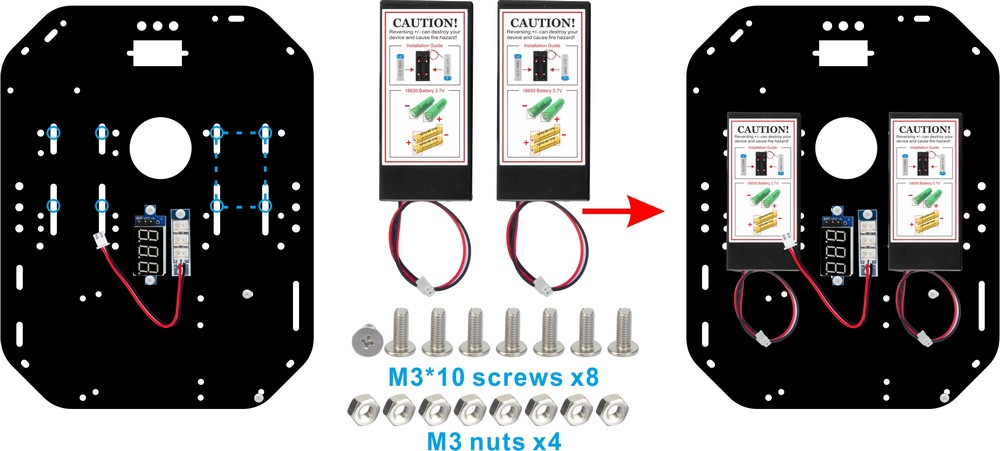
Paso 8. Instale 2 cajas de baterías en el chasis (2.ª capa) con 4 tornillos M3x10 y tuercas, tal como se muestra en las imágenes siguientes.
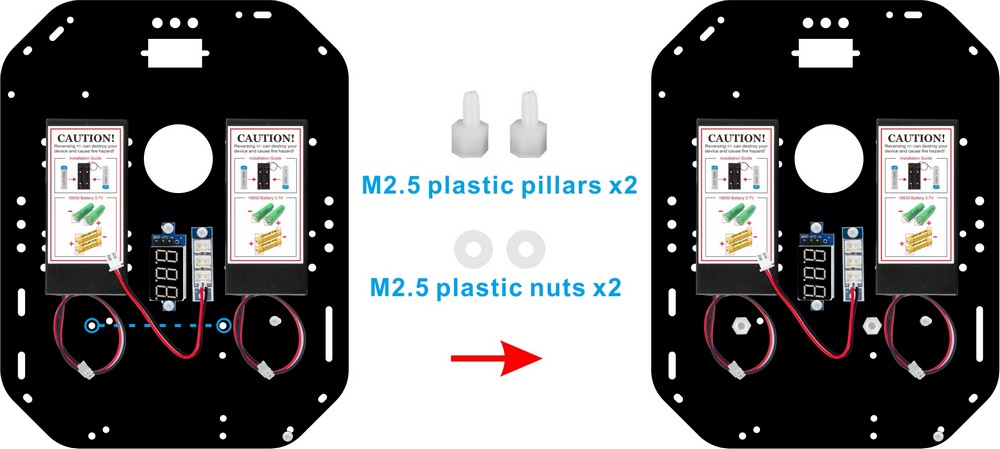
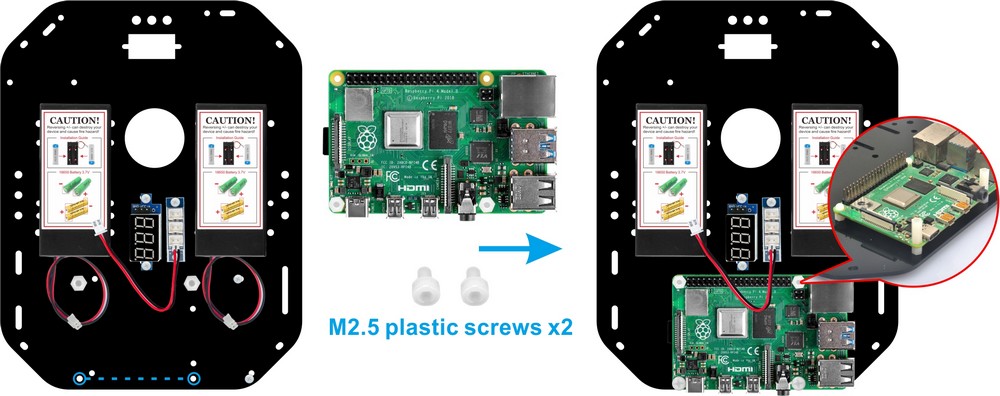
Paso 9. Instale 2 separadores y tuercas de plástico M2.5 en el chasis acrílico (2.ª capa) de la siguiente manera:
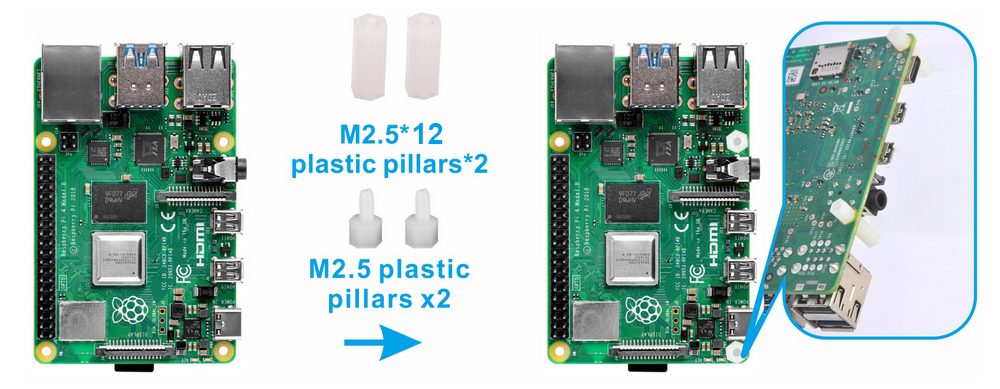
Paso 10. Pase el separador de plástico M2.5 por la Raspberry Pi y coloque el separador de plástico M2.5*12 desde la parte inferior hacia arriba, de la siguiente manera:
Paso 11. Fije 2 tornillos de plástico M2.5 por debajo del chasis y 2 tornillos de plástico M2.5 sobre la Raspberry Pi de la siguiente manera:
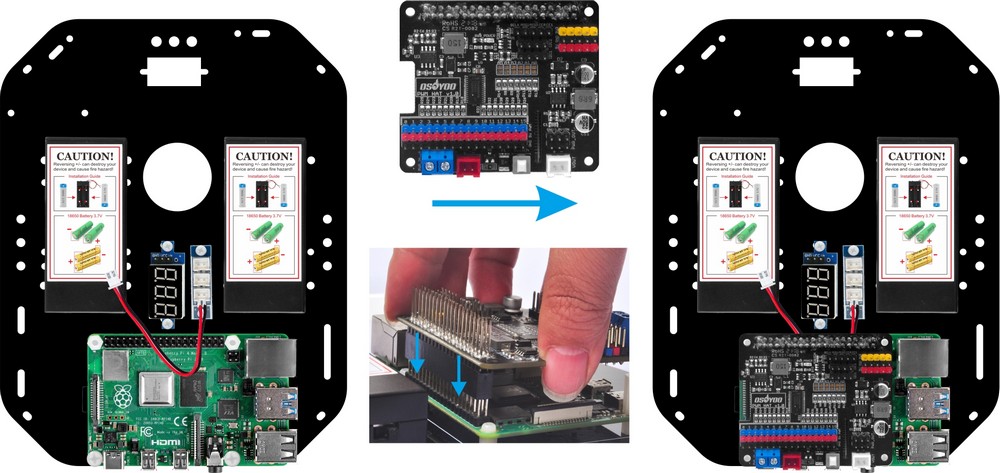
Paso 12. Inserte el OSOYOO PWM Hat sobre la Raspberry Pi de la siguiente manera:
Conexiones
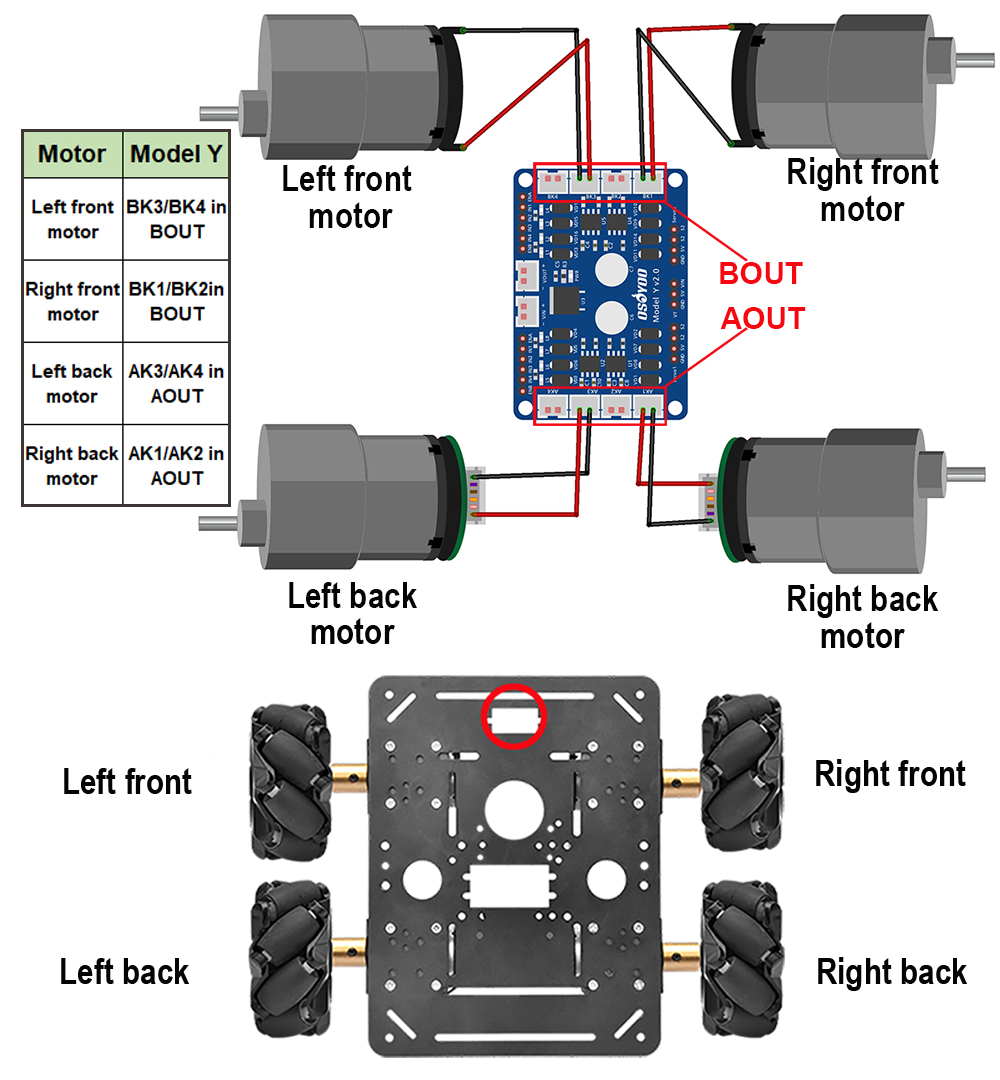
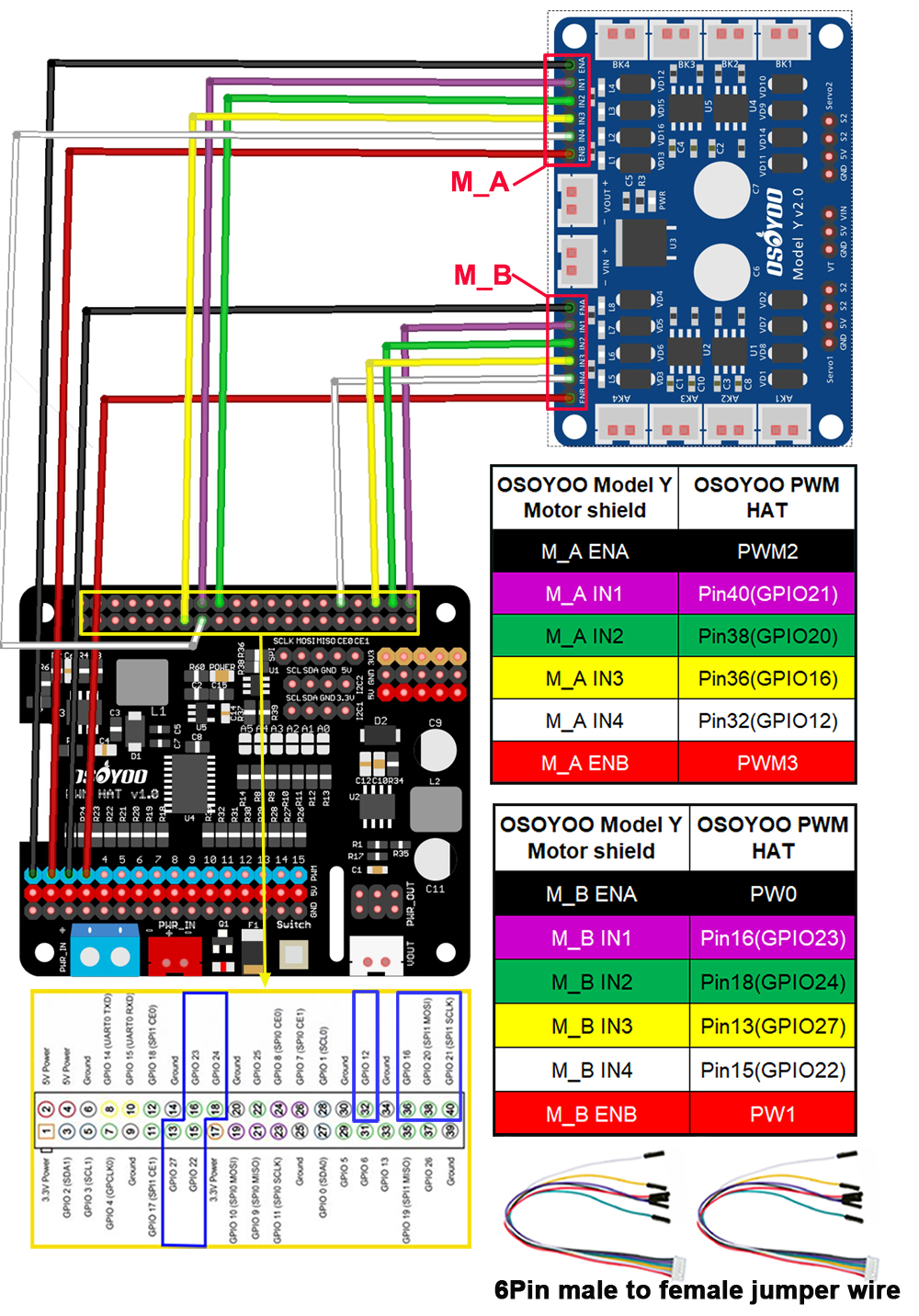
1. Conecte los 4 motores a la placa driver Model Y tal como se muestra en las imágenes siguientes.
2. Conecte M_A ENA, ENB del Model Y a PWM2, PWM3 del OSOYOO PWM Hat, y M_A IN1, IN2, IN3, IN4 a Pin40(GPIO21), Pin38(GPIO20), Pin36(GPIO16), Pin 32(GPIO12).
Conecte M_B ENA, ENB del Model Y a PWM0, PWM1 del OSOYOO PWM Hat, y M_B IN1, IN2, IN3, IN4 a Pin16(GPIO23), Pin18(GPIO24), Pin13(GPIO27), Pin 15(GPIO22).
Precaución:
Al insertar o extraer el conector del cable paralelo de 6 pines en el zócalo macho de 6 pines del Model Y, sujete siempre el portapines de plástico blanco. No tire de los cables para sacar el conector, ya que podría dañarlos.
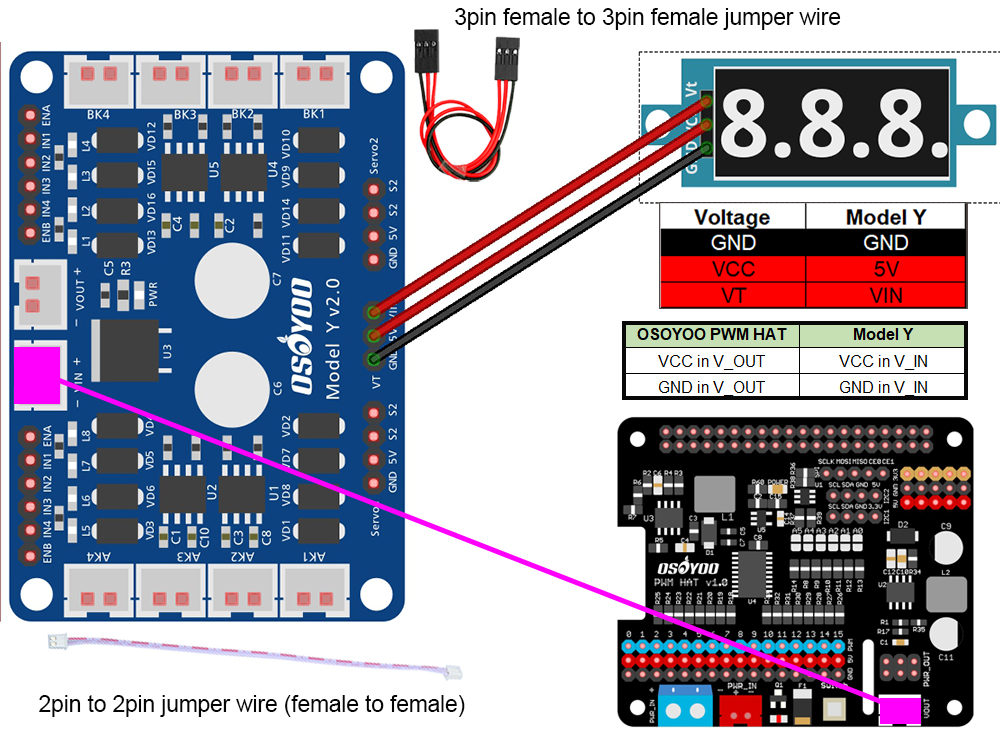
3. Conecte el voltímetro a la placa driver de motores Model Y con el cable puente hembra a hembra de 3 pines; conecte el zócalo V_OUT del OSOYOO PWM Hat al zócalo VIN de la placa driver Model Y con el cable puente de 2 pines a 2 pines (hembra a hembra):
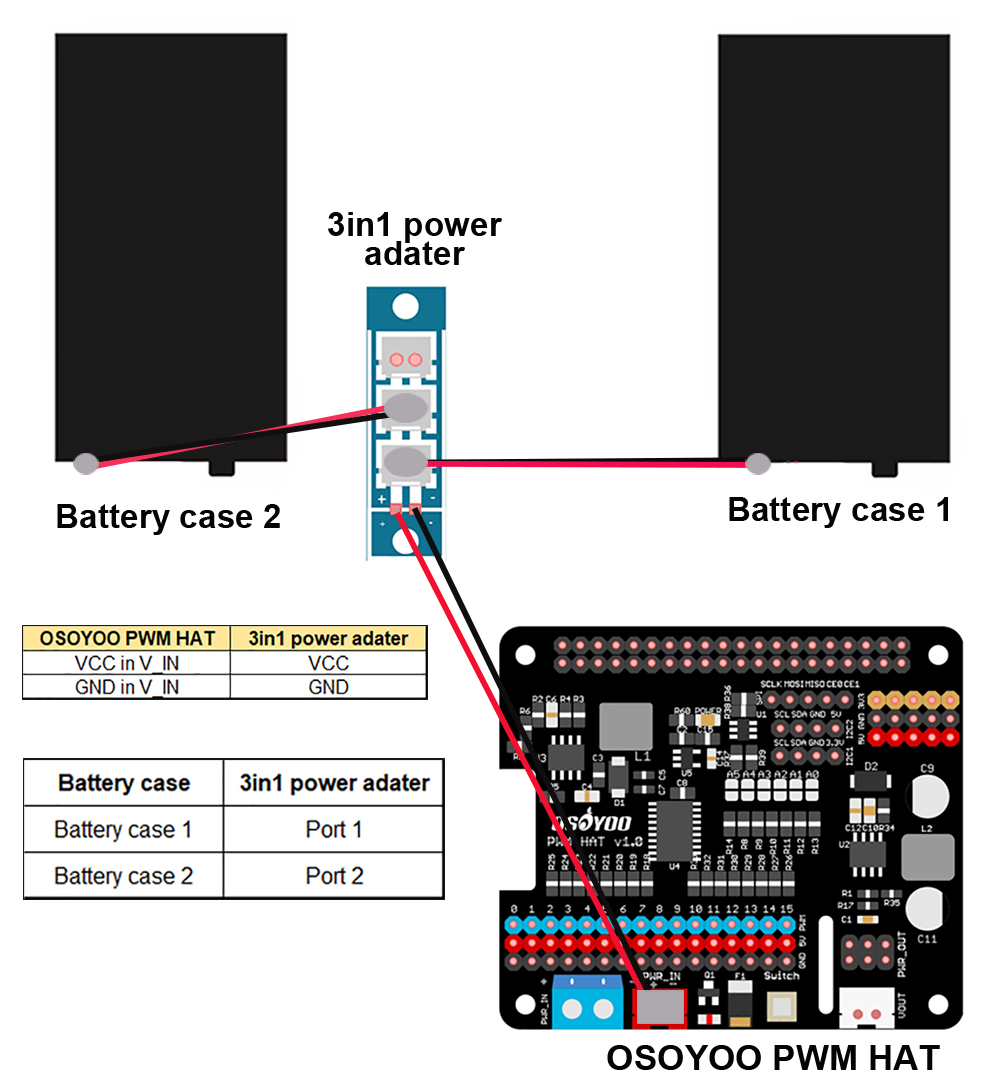
4. Inserte los conectores de 2 pines de las cajas de baterías en el adaptador de alimentación 3 en 1; inserte el conector de 2 pines del adaptador de alimentación 3 en 1 en el zócalo V_IN del OSOYOO PWM Hat de la siguiente manera:
Nota: El adaptador 3 en 1 está diseñado para conectar varias cajas de baterías de la misma tensión.
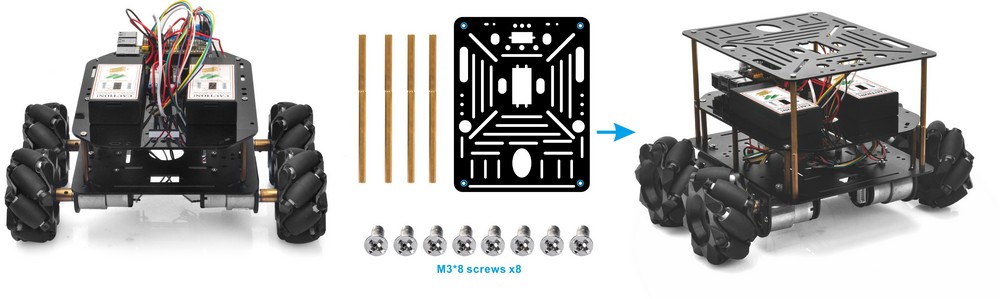
5. Instale el chasis (2.ª capa) sobre el chasis (1.ª capa) con los separadores de cobre M3*40. Tenga en cuenta la orientación delantera y trasera de ambos chasis. El robot quedará listo para funcionar al completar este paso.
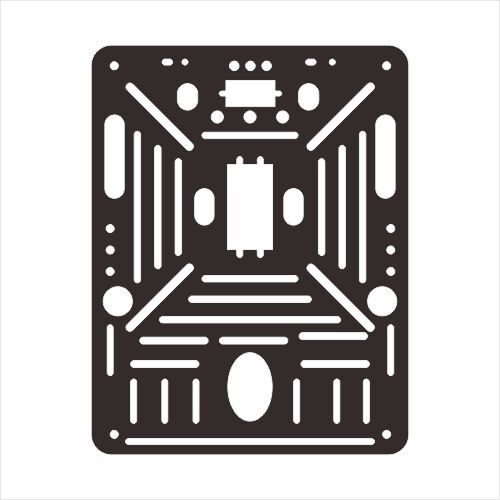
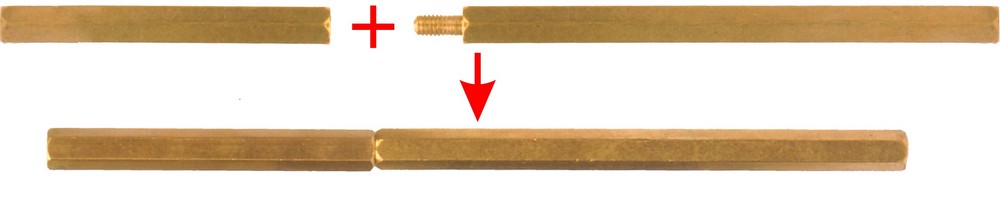
6. Si desea agregar más sensores, puede instalar el chasis (3.ª capa) sobre el robot. Primero enrosque firmemente el separador de cobre M3*40 con el separador de cobre M3*65+6 para formar un separador largo; luego instale el chasis (3.ª capa) sobre el chasis (1.ª capa) utilizando estos separadores largos.
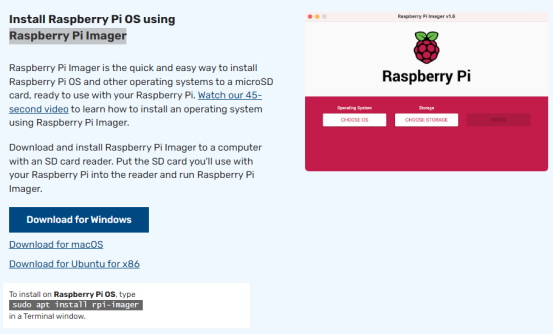
Instalación del SO con Raspberry Pi Imager
Nota: En este ejemplo se usa Raspberry Pi Imager v1.7.2 para instalar el sistema operativo. Otras versiones pueden tener algunas diferencias.
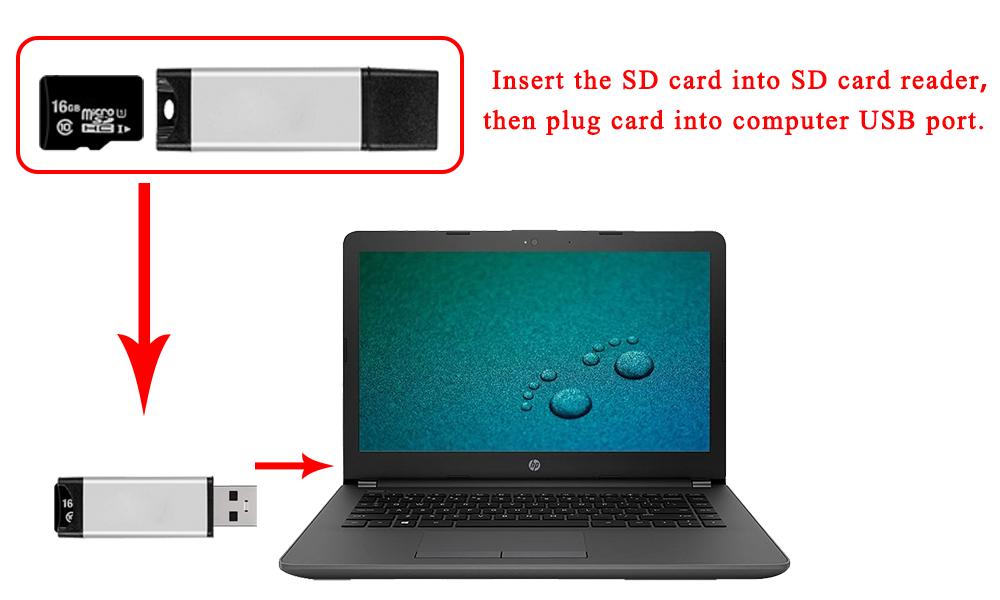
Paso 1: Prepare una tarjeta micro SD (tarjeta TF) recién formateada con un lector USB de tarjetas micro SD. Se recomiendan tamaños de 16 GB o 32 GB. (Omita este paso si su tarjeta SD ya tiene la imagen de Raspbian OS instalada.).
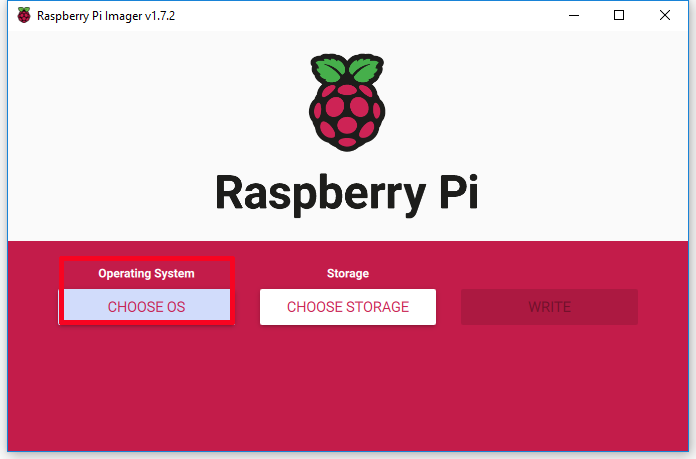
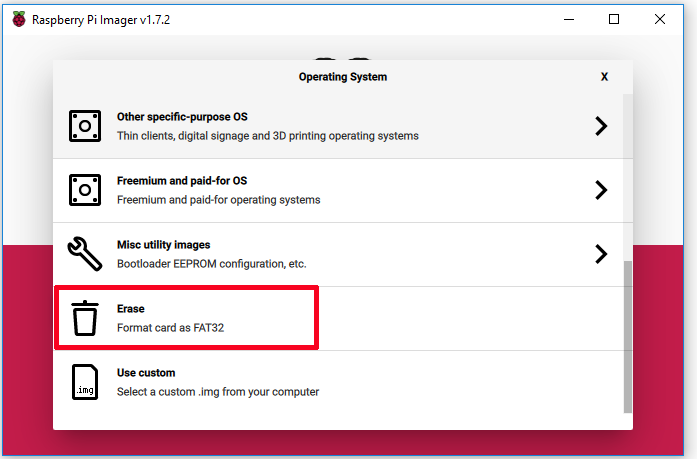
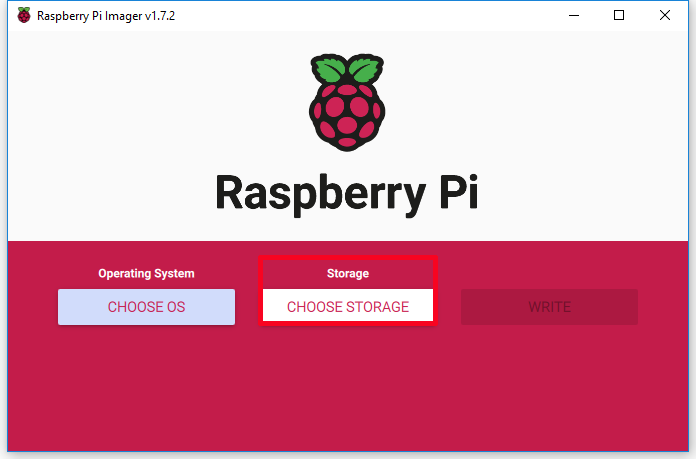
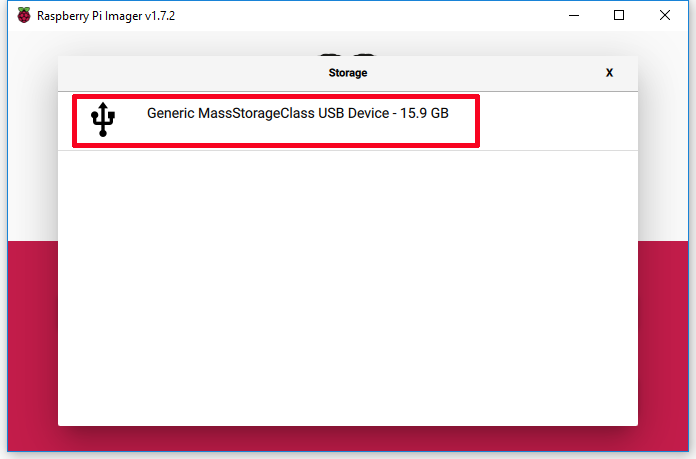
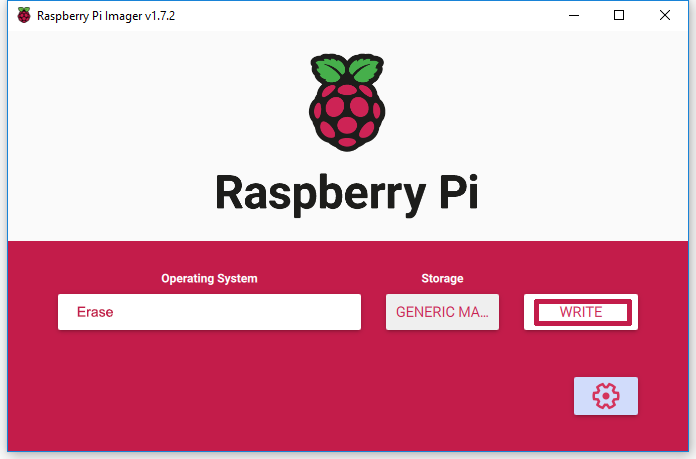
Paso 3): Si no sabe cómo formatear la tarjeta micro SD, abra Raspberry Pi Imager, seleccione “Erase” en el campo Sistema operativo y “su tarjeta micro SD” en el campo Almacenamiento, y haga clic en “WRITE” para formatearla.
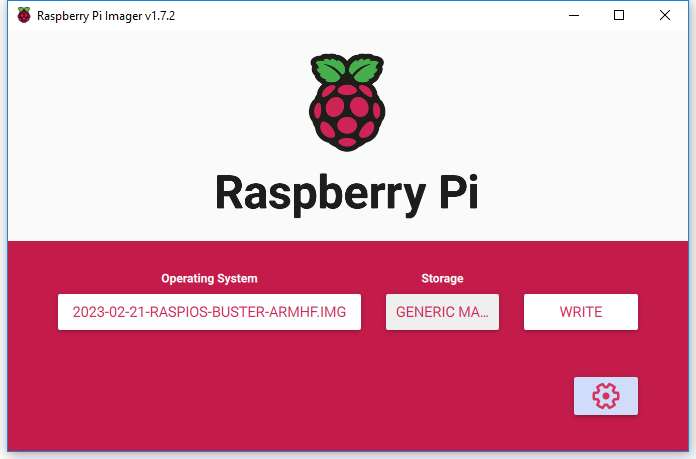
Paso 4): Abra Raspberry Pi Imager, seleccione “Use custom” en el campo Sistema operativo y busque el archivo “Raspberry Pi OS” que haya descargado; luego seleccione “su tarjeta SD” en el campo Almacenamiento. (Si ya ha grabado Raspberry Pi OS en su tarjeta SD, omita los pasos 3 a 5.)
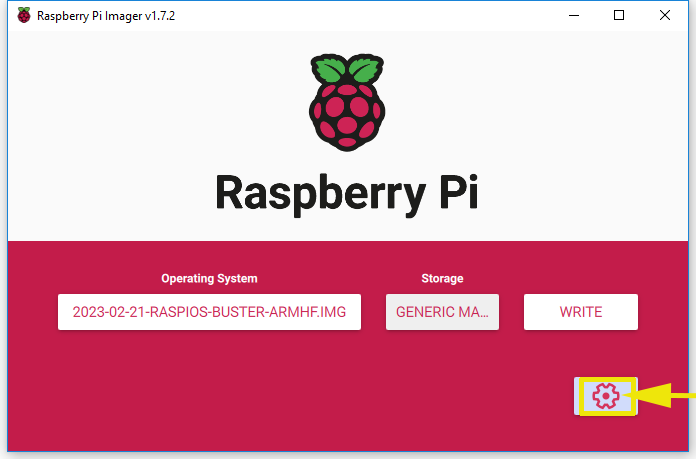
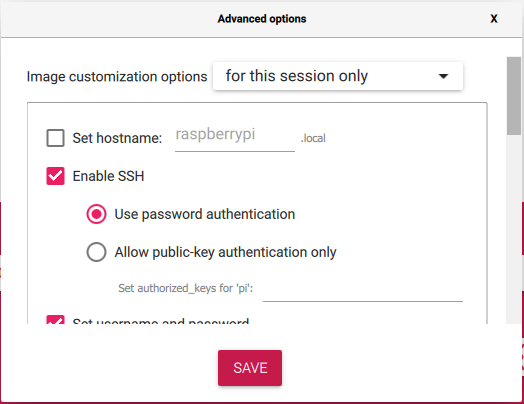
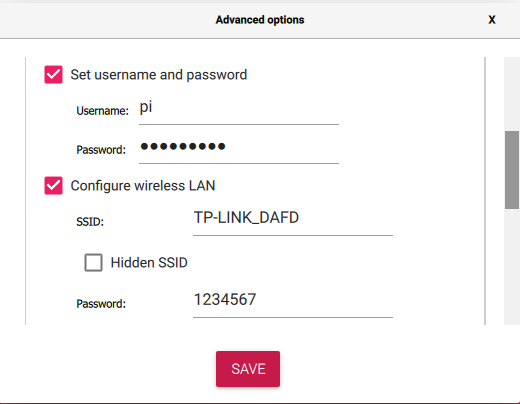
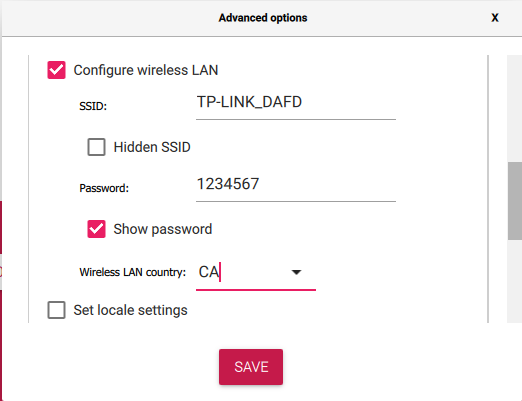
Paso 5): Haga clic en el icono de configuración para activar SSH, establezca el nombre de usuario y la contraseña (en este ejemplo usamos pi como nombre de usuario y raspberry como contraseña) y configure la red inalámbrica. Luego haga clic en “SAVE”.
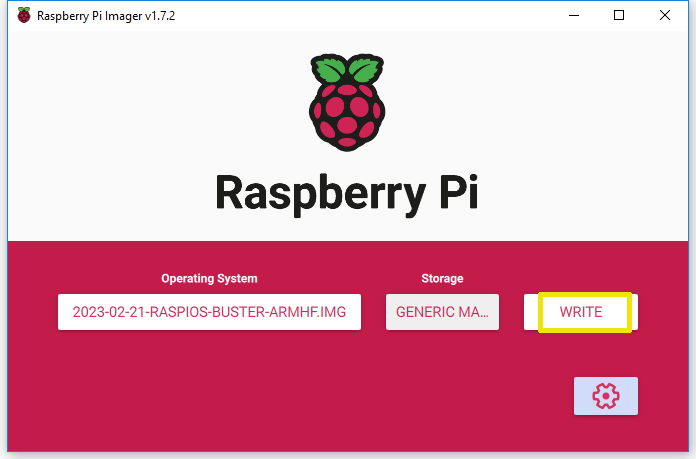
Paso 6): Haga clic en WRITE para grabar el sistema operativo (Raspberry Pi OS) en su tarjeta micro SD.
Control remoto de la Raspberry Pi
Paso 1: Conozca la dirección IP
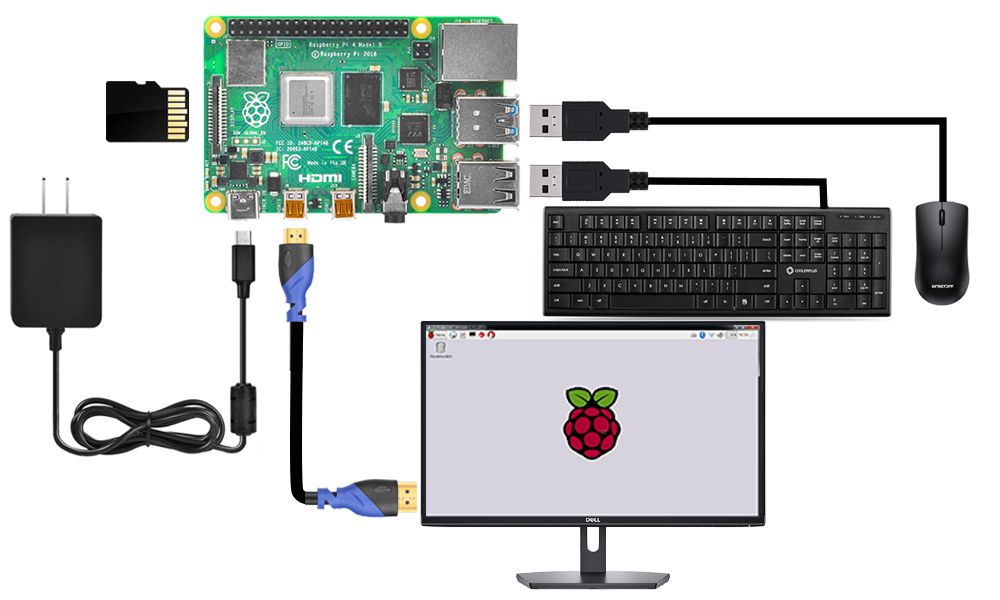
1. Conecte la Raspberry Pi a un monitor HDMI o televisor. Conecte un teclado y un ratón a los puertos USB de la Raspberry Pi. Inserte la tarjeta SD con el SO instalado en la ranura de su Raspberry Pi (si ya ha instalado el robot en su coche, conéctelo a una pantalla y localice la dirección IP).
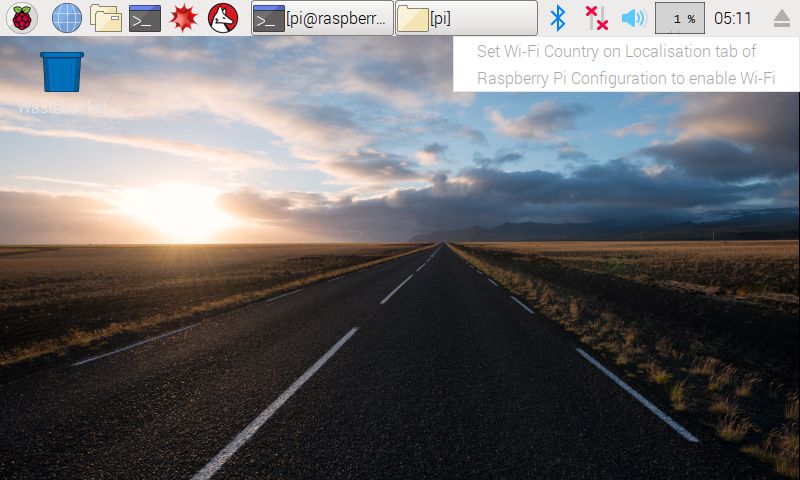
2. Si pasa el cursor sobre el icono de red LAN, verá el siguiente mensaje:
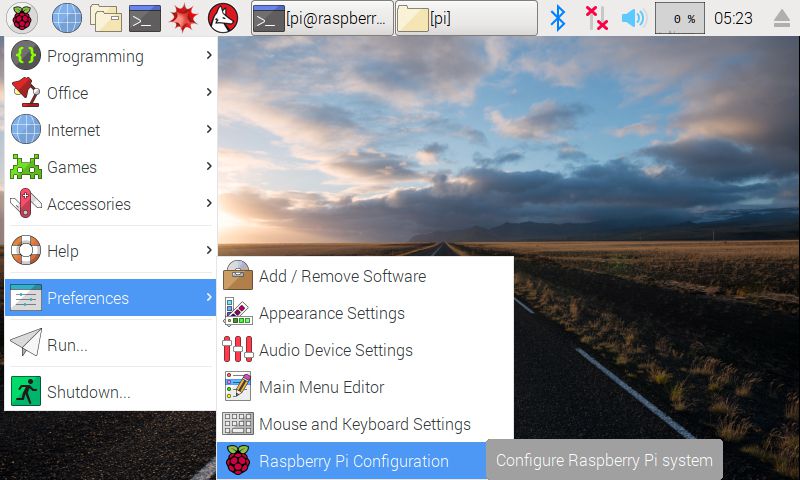
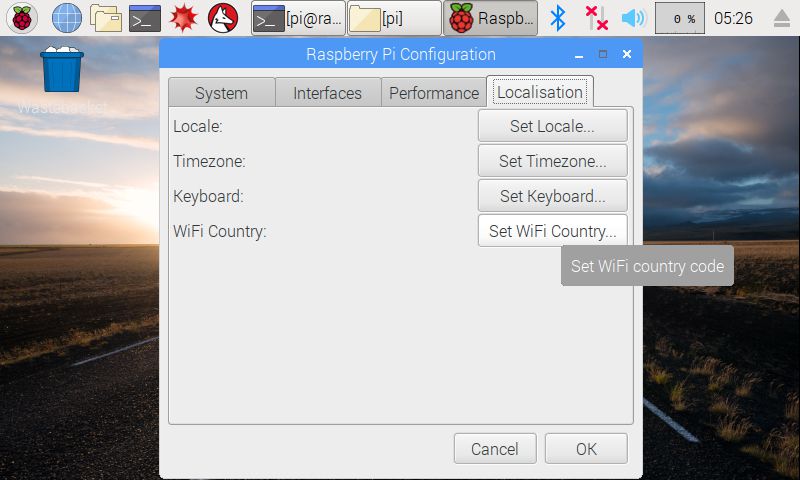
3. Haga clic para configurar la localización del WIFI de la siguiente manera:
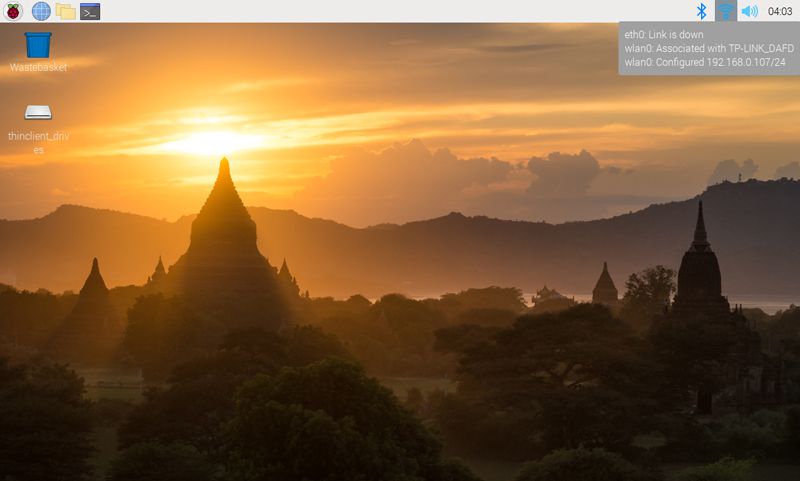
4. Localice la dirección IP de la RPi. Método A: Conecte la Pi a un monitor y un ratón, y haga clic en el icono de LAN o WIFI para obtener la dirección IP, como se muestra en la foto siguiente.
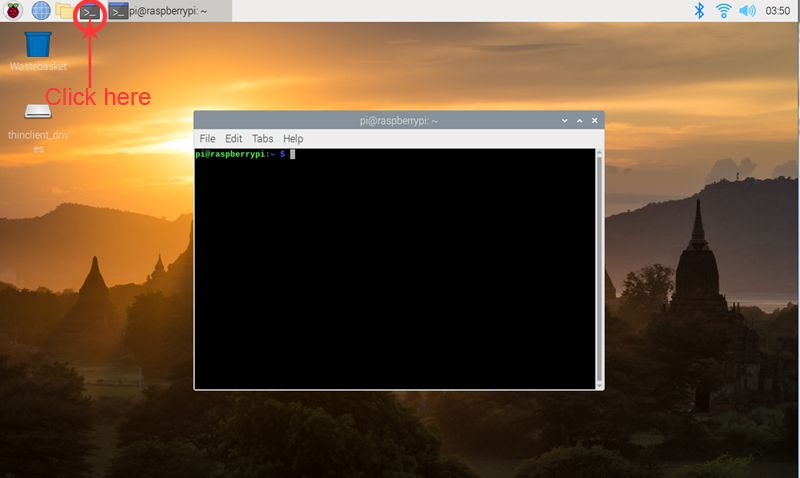
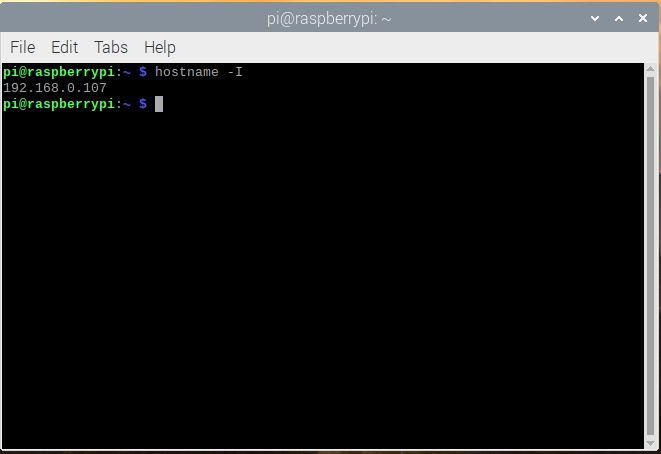
Método B: Haga clic en el icono de Terminal en la pantalla e introduzca el siguiente comando en la ventana de terminal para obtener su dirección IP:
hostname -I
Paso 2: Use una herramienta SSH para controlar la Raspberry Pi de forma remota
Nota:
1) Para obtener más información sobre cómo usar SSH para controlar la Raspberry Pi de forma remota, visite: https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) En nuestros tutoriales de ejemplo, usamos un PC con Windows como consola remota y PuTTY como herramienta SSH.
1. Inserte la tarjeta SD con el SO instalado en la placa Raspberry Pi (Atención: apague primero la Raspberry Pi) y luego encienda el robot.
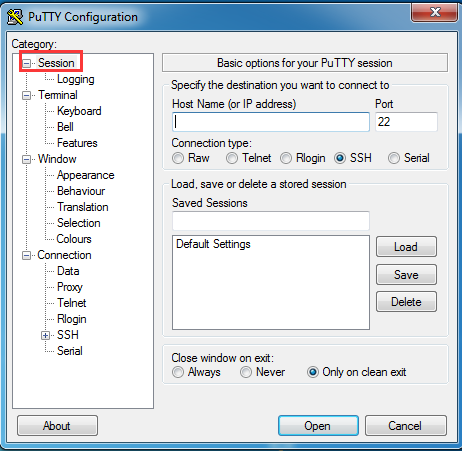
3. Abra PuTTY y haga clic en “Session” en el árbol de la izquierda (generalmente aparece contraído al iniciar PuTTY):
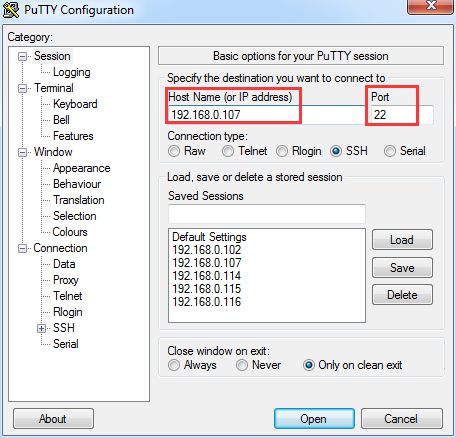
4. Introduzca la dirección IP obtenida en el campo “Host Name (or IP address)” y escriba 22 en el campo “Port” (por defecto ya es 22); luego haga clic en “Open”.
5. La primera vez que inicie sesión en la Raspberry Pi con esa dirección IP, aparecerá un aviso de seguridad. Haga clic en Yes. Cuando la ventana de PuTTY muestre el prompt “login as:”, escriba el nombre de usuario: pi, y la contraseña: raspberry (la predeterminada, si no la ha cambiado). Nota: al escribir la contraseña, la ventana no mostrará nada, pero en realidad sí se está introduciendo. Concéntrese en escribirla correctamente y pulse Intro. Tras iniciar sesión correctamente, la ventana mostrará lo siguiente:
Paso 4: Escriba el siguiente comando para descargar el código de ejemplo.
wget https://osoyoo.com/driver/mecanum/mecanum.py
Paso 5: Coloque el robot en el suelo y ejecute el siguiente comando:
python mecanum.py
Una vez que el programa Python esté en ejecución, los motores avanzarán durante 0,75 segundos, luego retrocederán durante 0,75 segundos, girarán a la izquierda durante 0,75 segundos y a la derecha durante 0,75 segundos, se desplazarán lateralmente hacia la derecha, luego hacia la izquierda, realizarán algunos movimientos omnidireccionales y se detendrán.
Solución de problemas:
Si está ejecutando Bookworm OS y al correr el programa mecanum.py aparece el siguiente mensaje de error:
GPIO.setup(IN1, GPIO.OUT)
^^^^^^^^^^^^^^^^^^^^^^^^^
RuntimeError: Cannot determine SOC peripheral base address
Este mensaje indica que la librería rpi.gpio no es compatible con Bookworm OS. Debe reinstalar la librería rpi.gpio para Pi 5 con los siguientes comandos:







































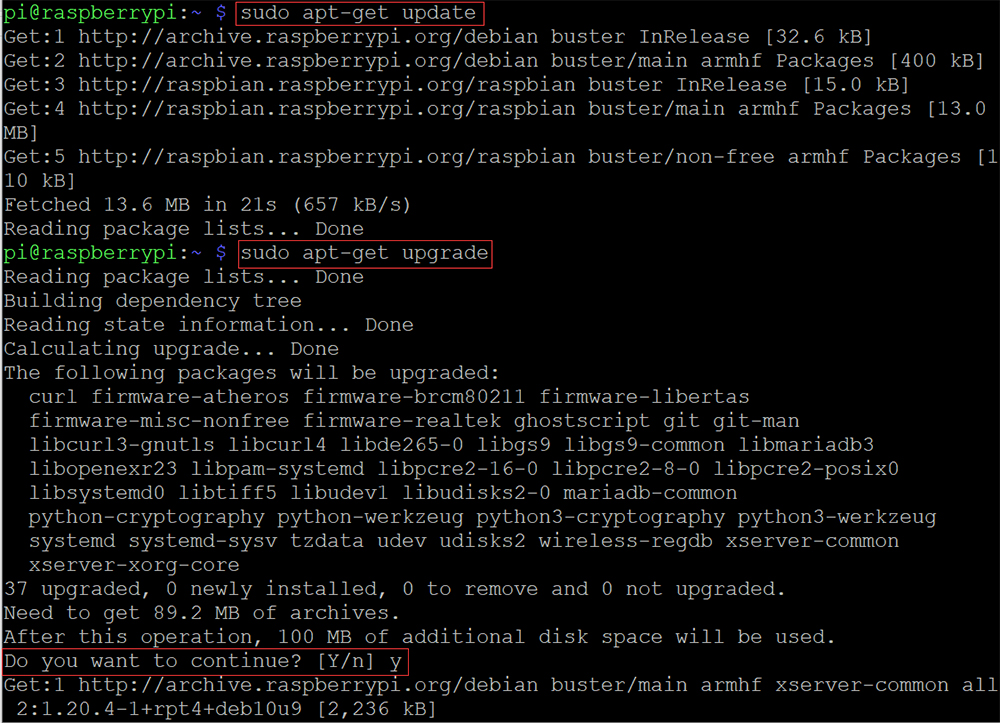
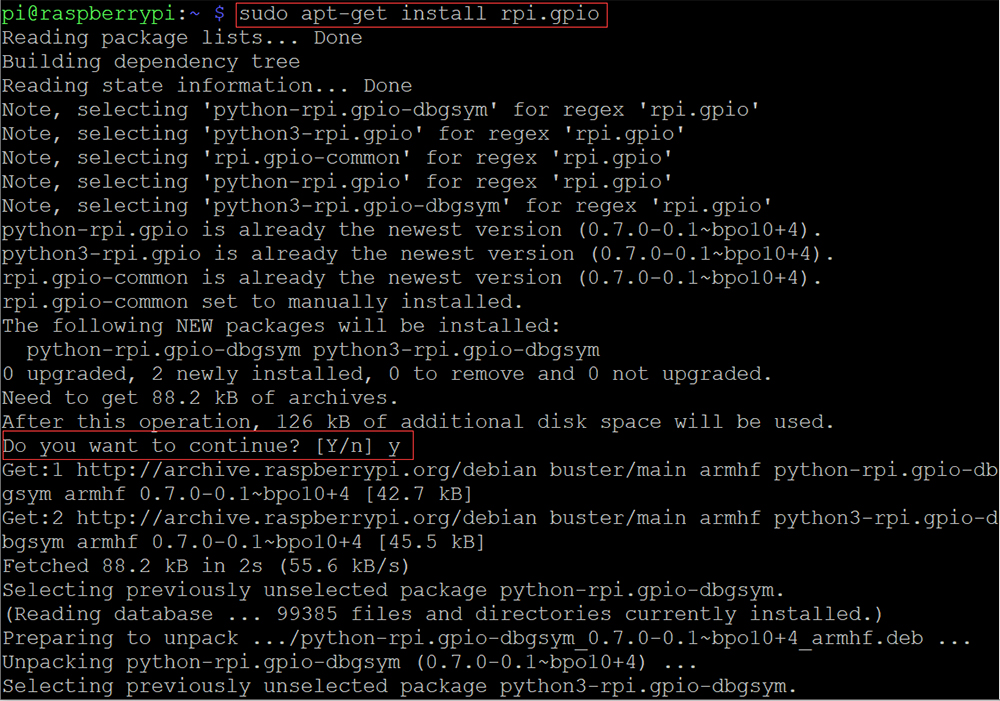
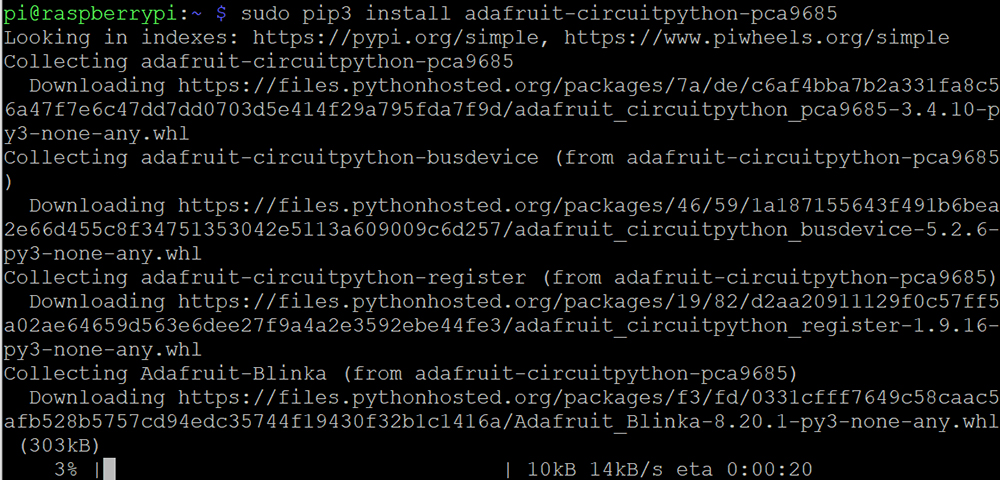
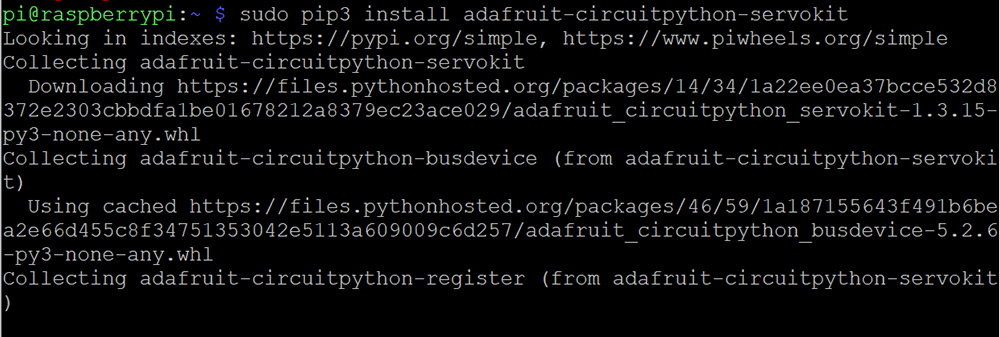


{kind=link}
{kind=link}