Il kit OSOYOO FlexiRover è una piattaforma ad alte prestazioni per robot con ruote Mecanum, progettata per appassionati di Raspberry Pi (dai 15 anni in su) con esperienza nel montaggio di robot e nella programmazione. Questo kit è compatibile con Raspberry Pi 2, 3, 4 e con il nuovissimo Raspberry Pi 5. Offre una base solida per costruire robot personalizzati, puntando su flessibilità, robustezza e creatività. Il kit include un potente sistema di motori, ampie possibilità di espansione e un’elevata capacità di carico, rendendolo adatto allo sviluppo avanzato di robot. Si noti che la scheda Raspberry Pi non è inclusa, ma il kit fornisce tutti i componenti necessari per assemblare un telaio funzionante. Motori potenti, ruote Mecanum e un telaio personalizzabile lo rendono una piattaforma versatile per un’ampia gamma di applicazioni. Pensato per sviluppatori e maker, il FlexiRover permette di esplorare, innovare e trasformare le proprie idee robotiche in realtà. Che si tratti di didattica, ricerca o progetti personali, il FlexiRover è la scelta ideale per costruire un robot con ruote Mecanum ad alte prestazioni basato su Raspberry Pi.
Caratteristiche principali
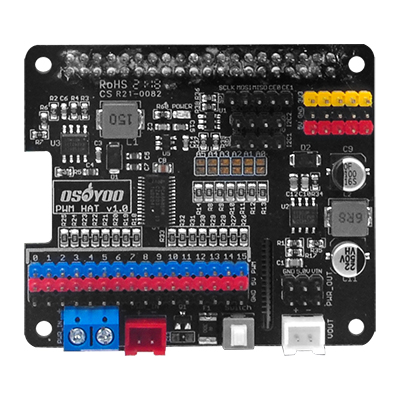
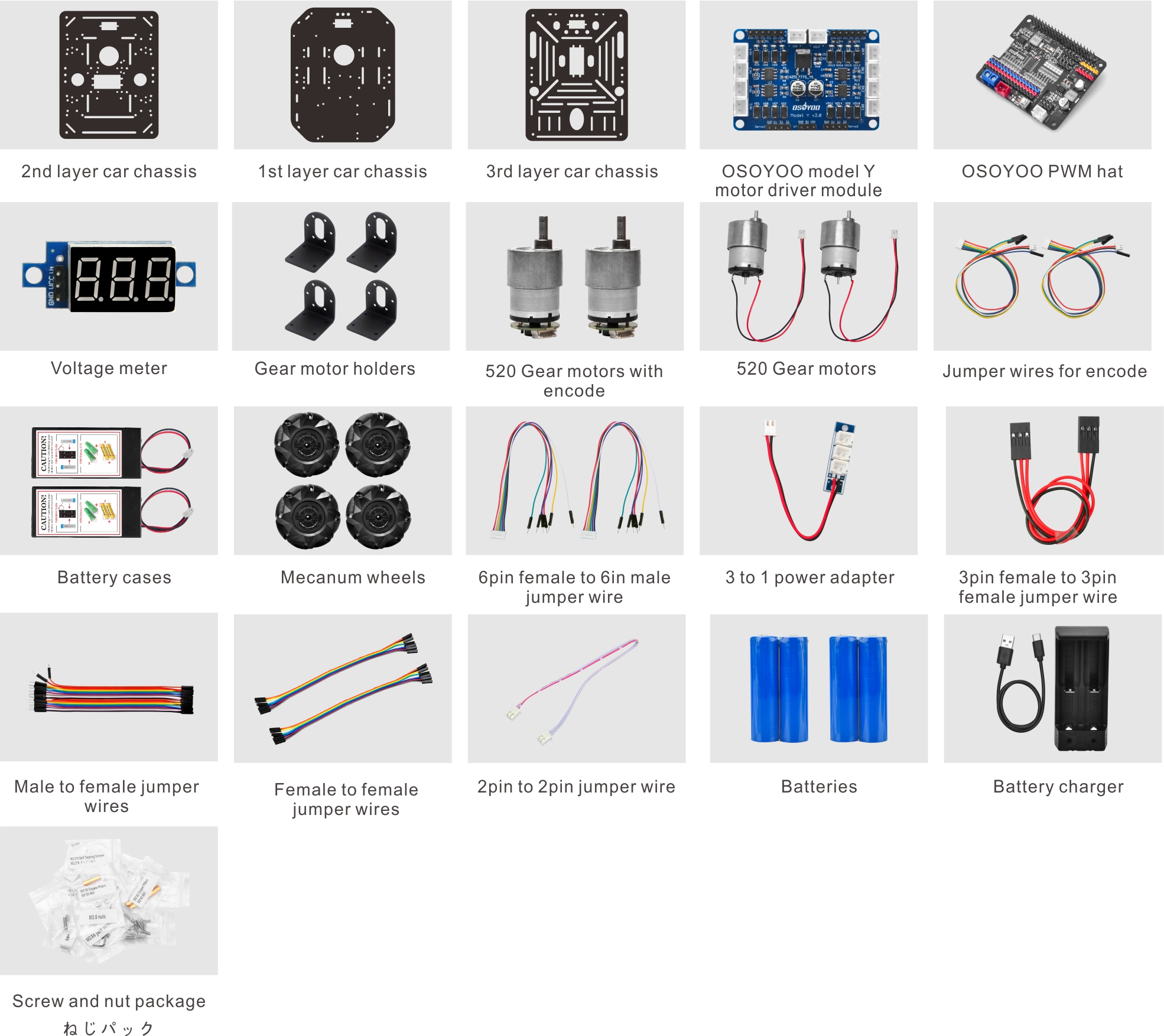
Ampia compatibilità —- Progettato per funzionare perfettamente con Raspberry Pi 2, 3, 4 e 5. La scheda di espansione inclusa amplia le capacità del Pi, supportando fino a 16 servomotori per applicazioni robotiche avanzate.
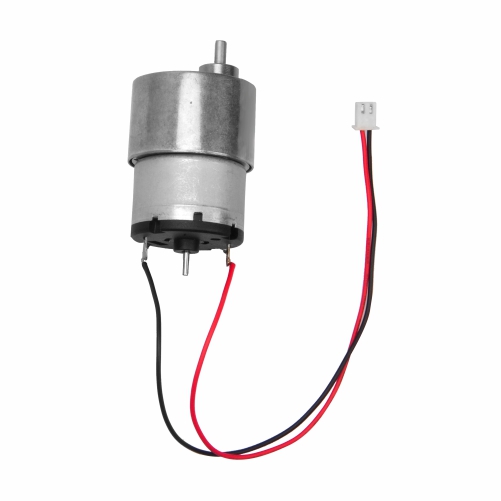
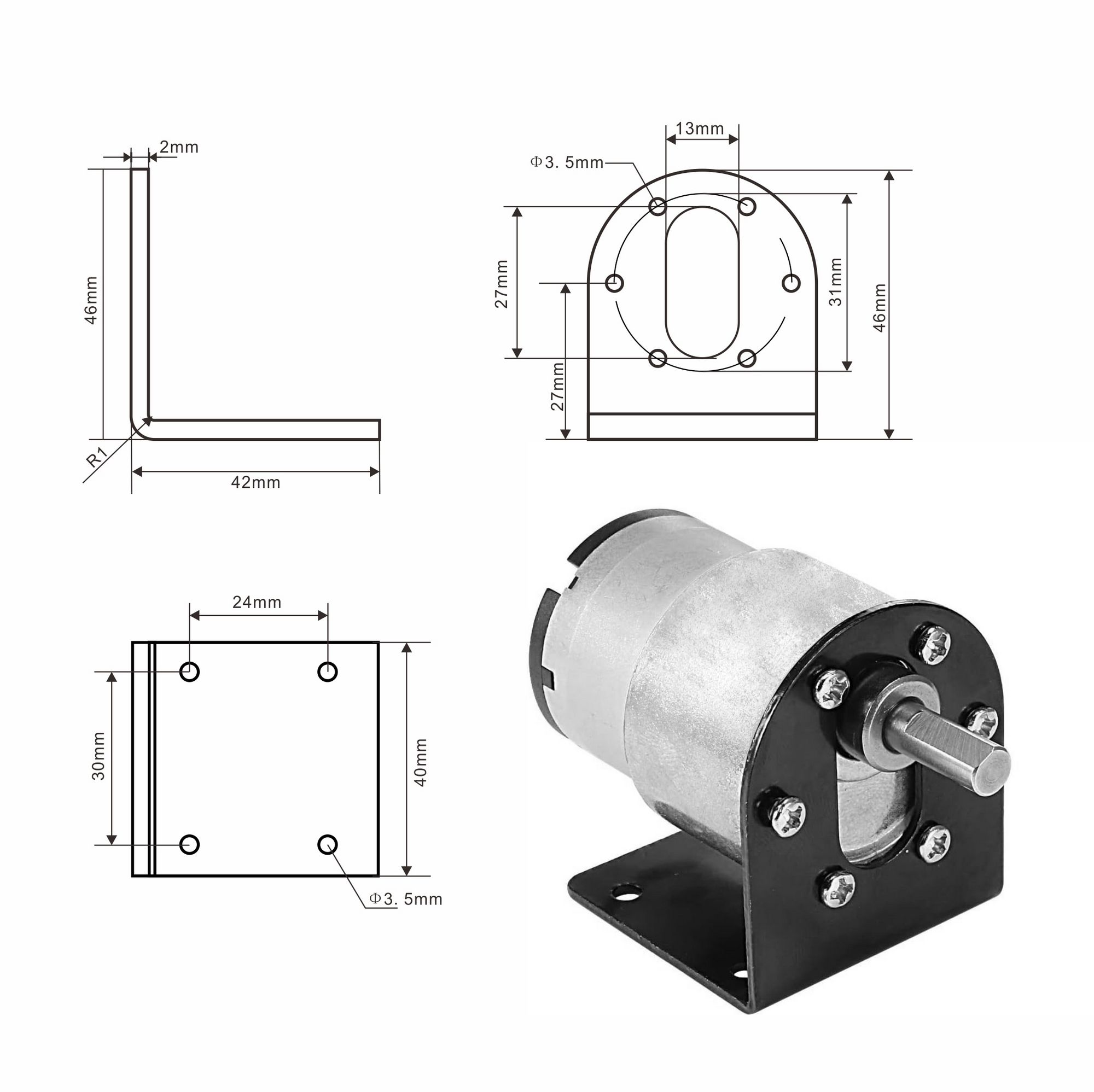
Motori 520 di alta qualità —- Include quattro motori 520 per un funzionamento fluido. Due di essi sono dotati di encoder per un controllo preciso del movimento, essenziale per la navigazione e i compiti avanzati.
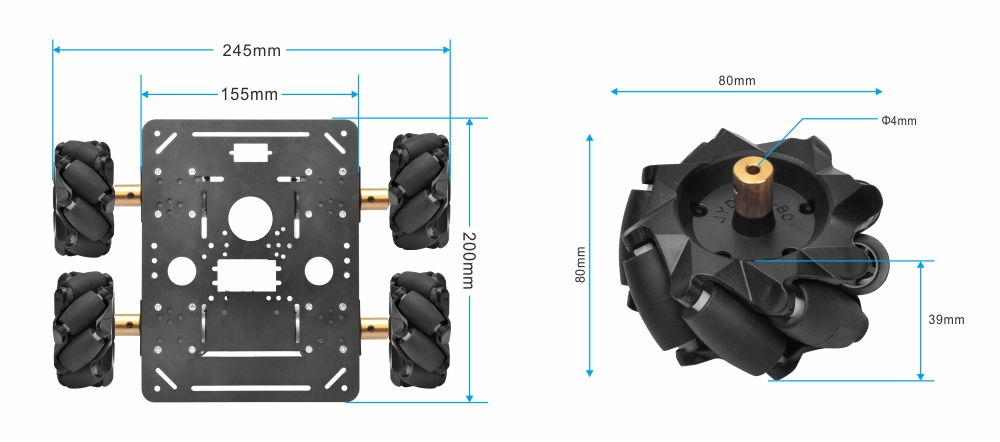
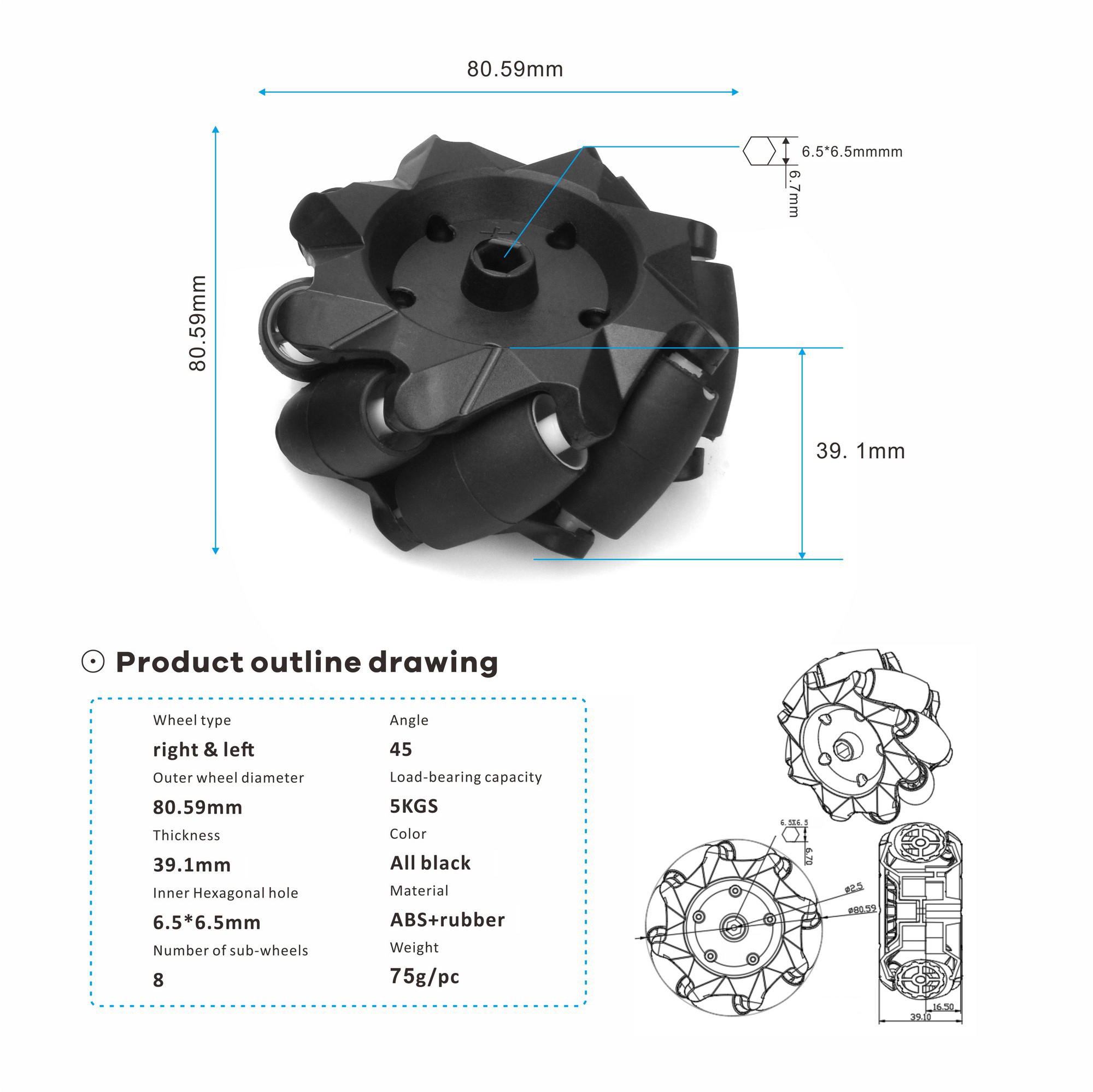
Ruote Mecanum omnidirezionali —- Le quattro ruote Mecanum consentono il movimento in tutte le direzioni, offrendo una manovrabilità superiore per il posizionamento preciso e le applicazioni più varie.
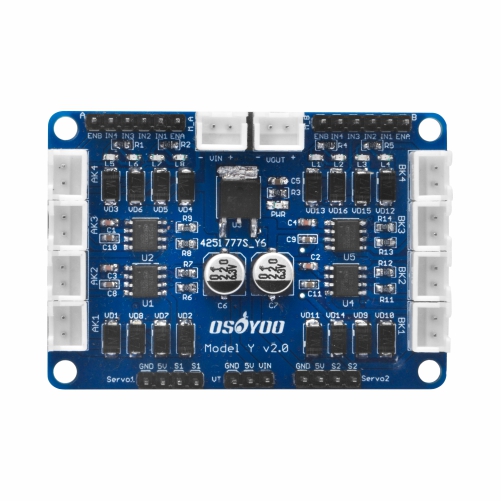
Driver motore robusto —– Il driver motore OSOYOO Model Y supporta quattro canali motore indipendenti, garantendo prestazioni affidabili anche sotto carichi elevati.
Gestione affidabile dell’alimentazione —- Il kit include due portabatterie con interruttore, che garantiscono un’alimentazione stabile anche per le elevate esigenze di corrente del Raspberry Pi 5. Sono incluse batterie ricaricabili e caricabatterie.
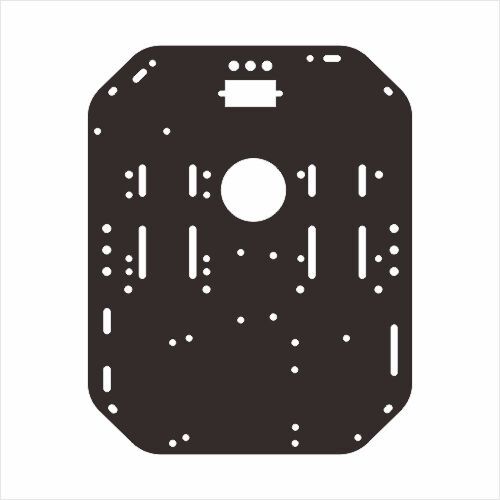
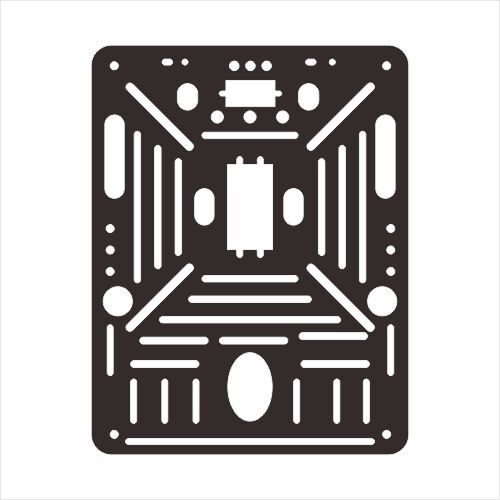
Telaio personalizzabile —- Il telaio preforato supporta accessori come sensori, bracci meccanici e fotocamere, permettendo un’ampia personalizzazione per i progetti più diversi.
Design resistente —- In grado di trasportare fino a 2,5 kg, il FlexiRover offre una base solida per lo sviluppo di robot avanzati.
Specifiche tecniche
N.
Immagine
Componente
Qtà.
Specifiche
Link di acquisto
1
Scheda Raspberry Pi 2/3/4
(non inclusa nella confezione)
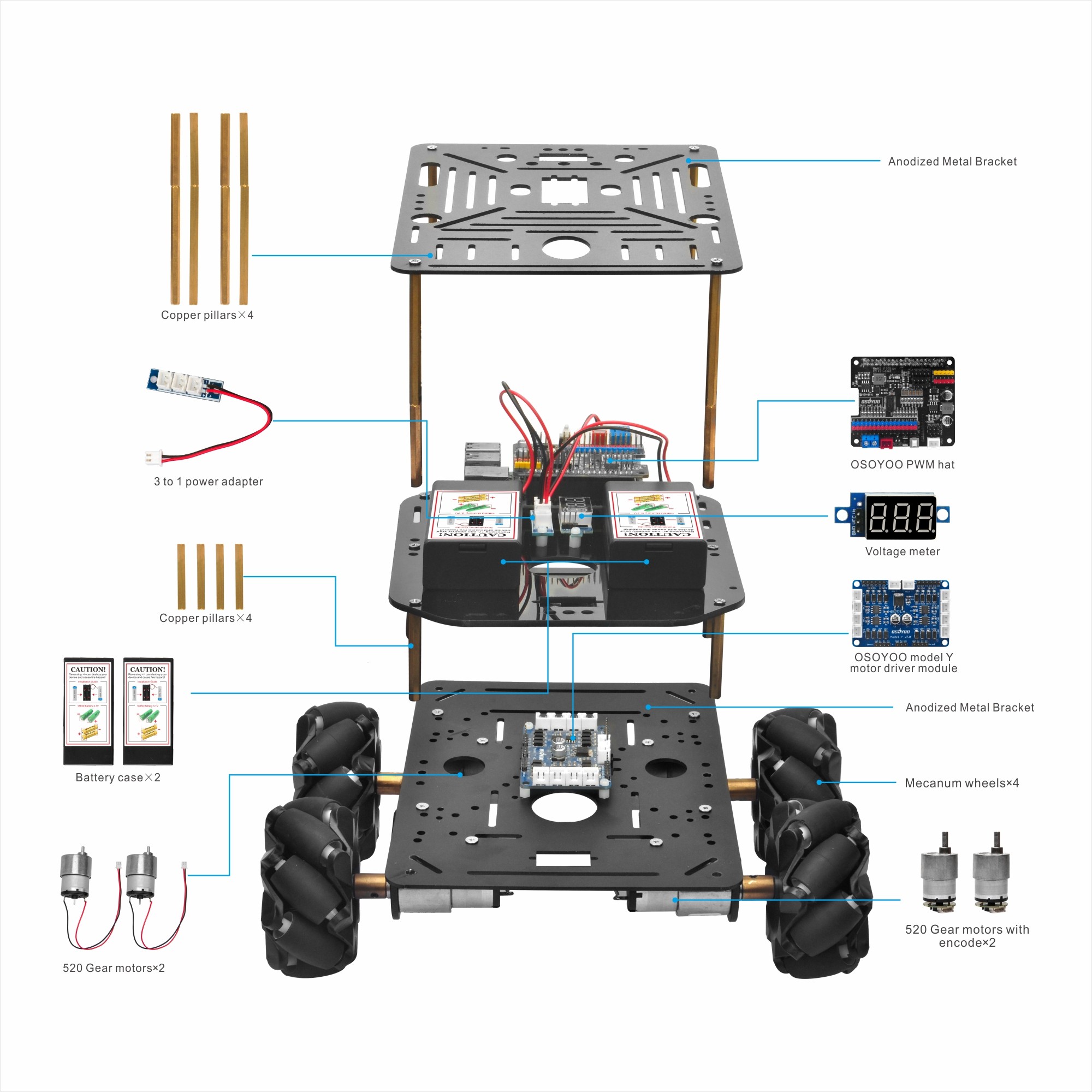
Contenuto: 1 cacciavite a taglio, 1 chiave esagonale, 60 viti M3x8, 12 set viti+distanziali+dadi in plastica M2.5, 4 distanziali in rame M3x65+6, 10 distanziali in rame M3x40, 30 viti+dadi M3x10, 4 viti M2.5×20, 4 giunti motore
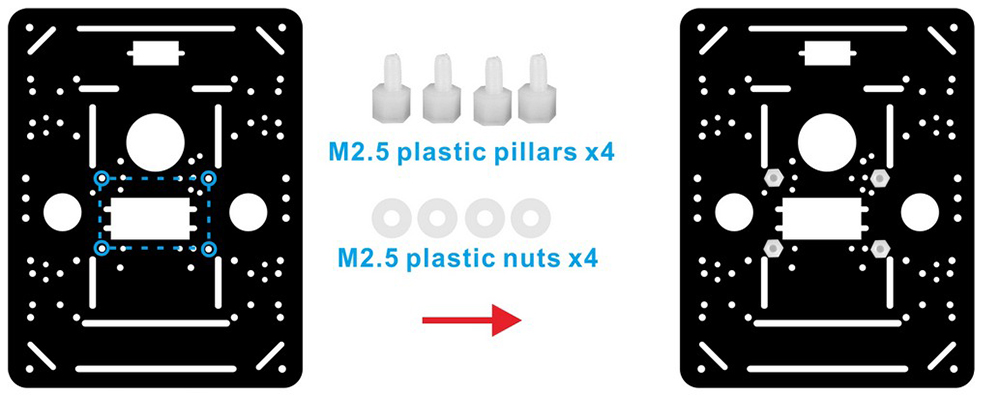
Passo 1. Prima di tutto, installate 4 distanziali in plastica M2.5 sul telaio del primo strato (metallo), come mostrato nelle immagini seguenti. (Nota: questi quattro distanziali sono per il driver motore OSOYOO Model Y, che è troppo pesante da installare sui distanziali se prima si montano i motori):
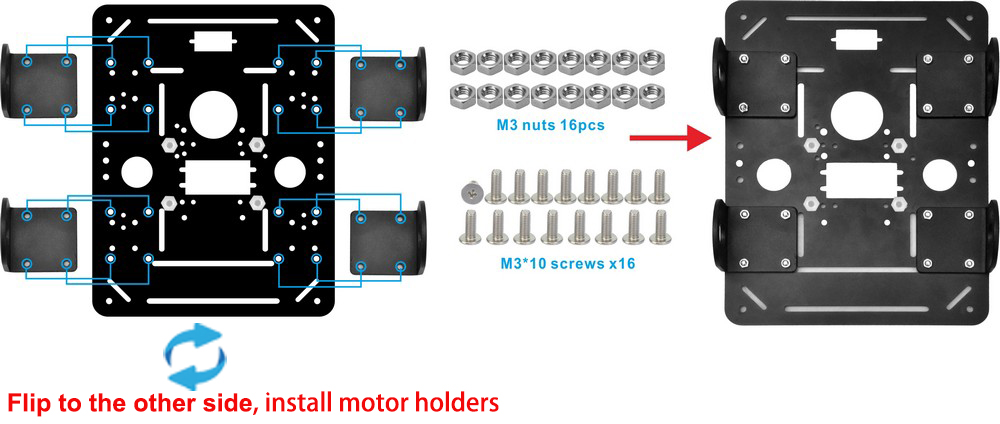
Passo 2. Girate il telaio del primo strato e installate i supporti dei motoriduttori con viti M3x10 e dadi M3 come mostrato nelle immagini seguenti.
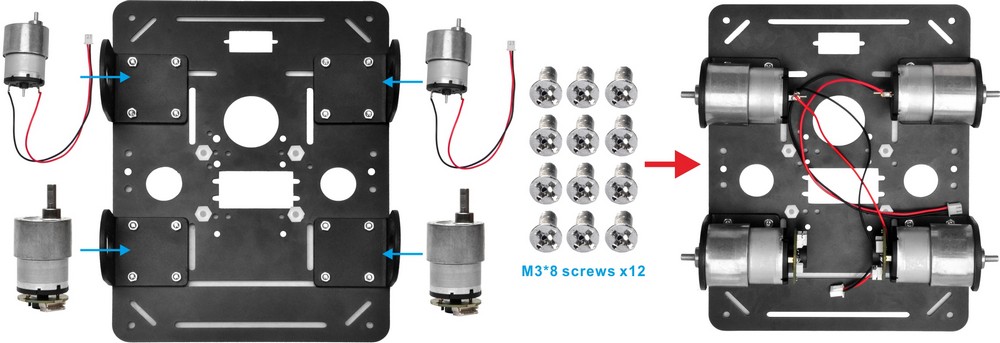
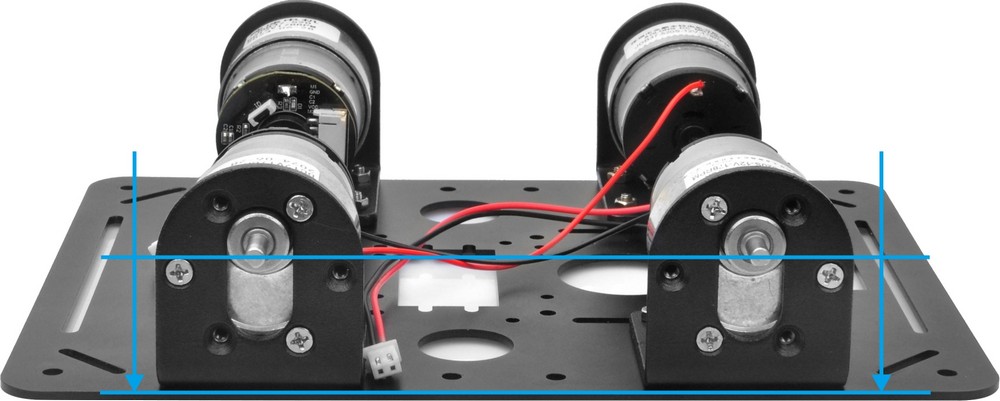
Passo 3. Installate 2 motoriduttori 520 con cavo sui supporti posizionati nella parte anteriore del telaio e 2 motori 520 con encoder sui supporti nella parte posteriore del telaio, usando viti M3x8.
Nota: Assicuratevi che i 4 assi dei motori siano allo stesso livello
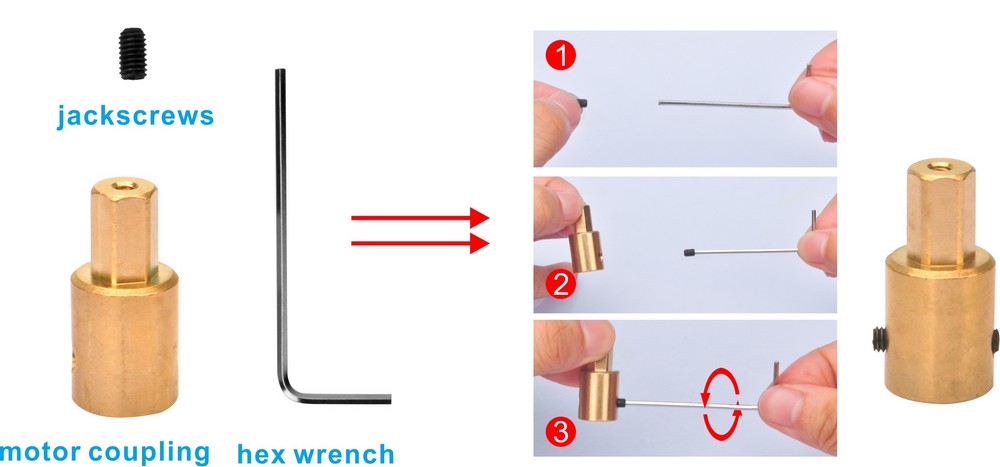
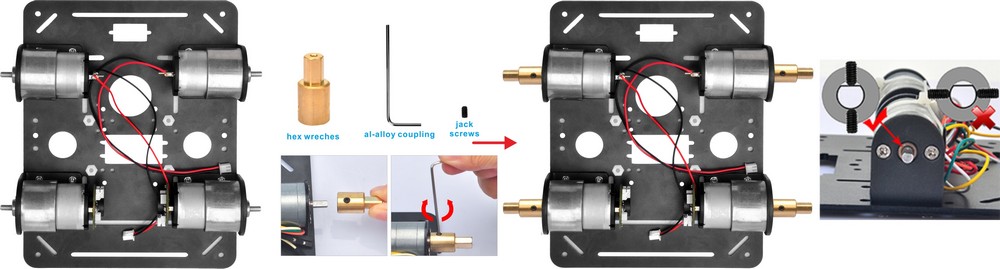
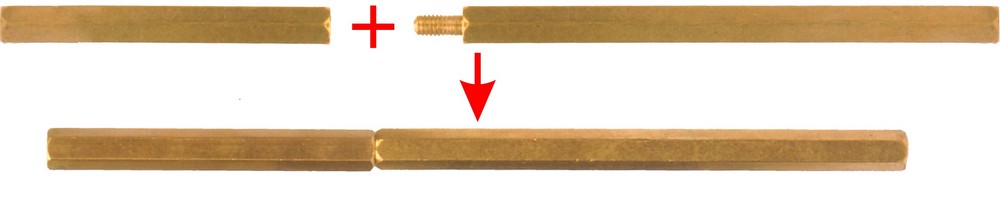
Passo 4. Inserite le viti di bloccaggio nel giunto in lega di alluminio e stringetele per fissare il giunto al motore, come mostrato nelle immagini seguenti. Nota: l’asse del motoriduttore 520 ha un lato piatto. Assicuratevi che una delle viti di bloccaggio sia posizionata su questa parte piana e stringete entrambe le viti sull’asse.
Passo 5. Installate le 4 ruote Mecanum sul giunto in lega di alluminio con 4 viti M2.5×20, come mostrato nelle immagini seguenti:
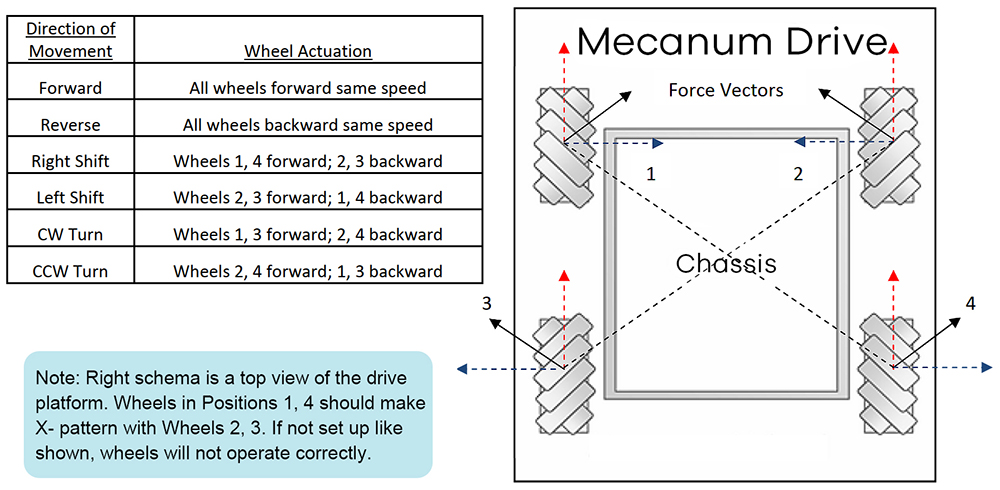
Nota: esistono due tipi di ruote Mecanum, sinistra e destra; la differenza sta nell’orientamento dei rulli. Una configurazione corretta richiede che ognuna delle quattro ruote sia montata nel modo mostrato di seguito, con l’asse di rotazione del rullo superiore di ciascuna ruota che punta verso il centro della piattaforma. Si noti che tutte le analisi dinamiche e il codice precaricato sono basati su questa configurazione.
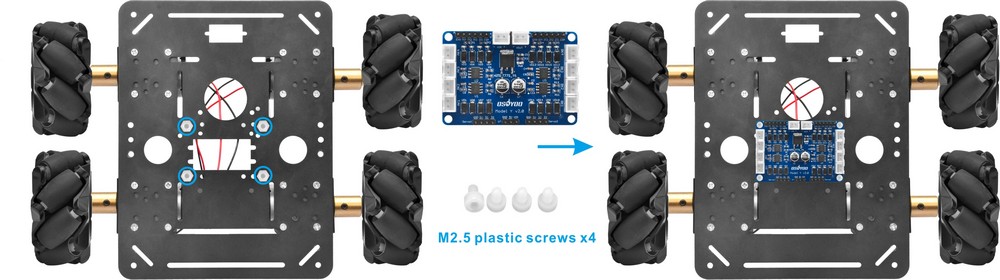
Passo 6. Fissate il modulo driver motore OSOYOO Model Y sul telaio del primo strato con viti in plastica M2.5, come mostrato nelle immagini seguenti:
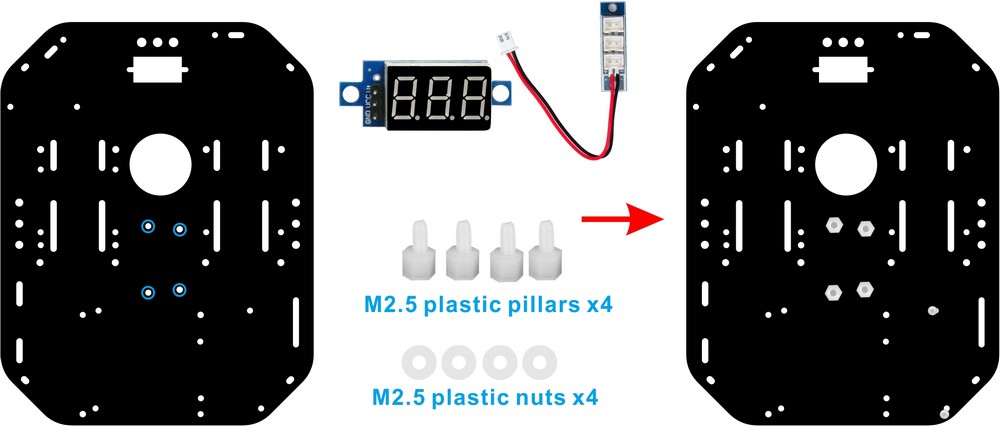
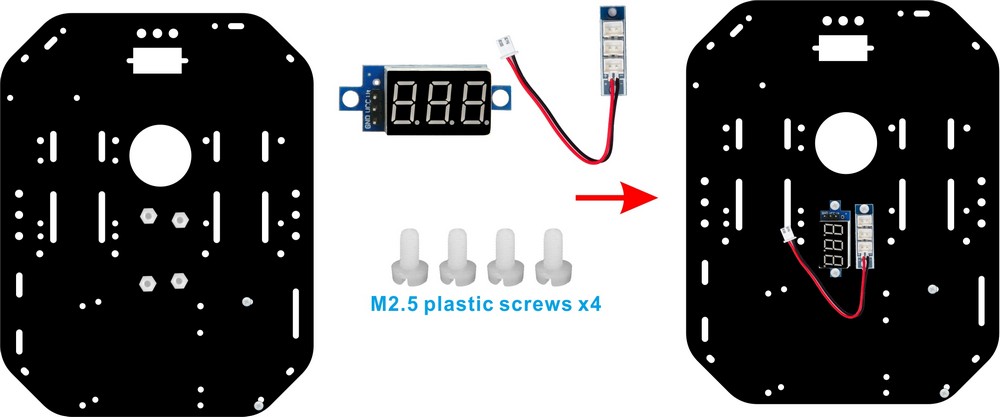
Passo 7. Installate 4 distanziali e dadi in plastica M2.5 sul telaio del secondo strato (acrilico), poi fissate l’adattatore di alimentazione 3 in 1 e il voltmetro con viti in plastica M2.5, come mostrato nelle immagini seguenti:
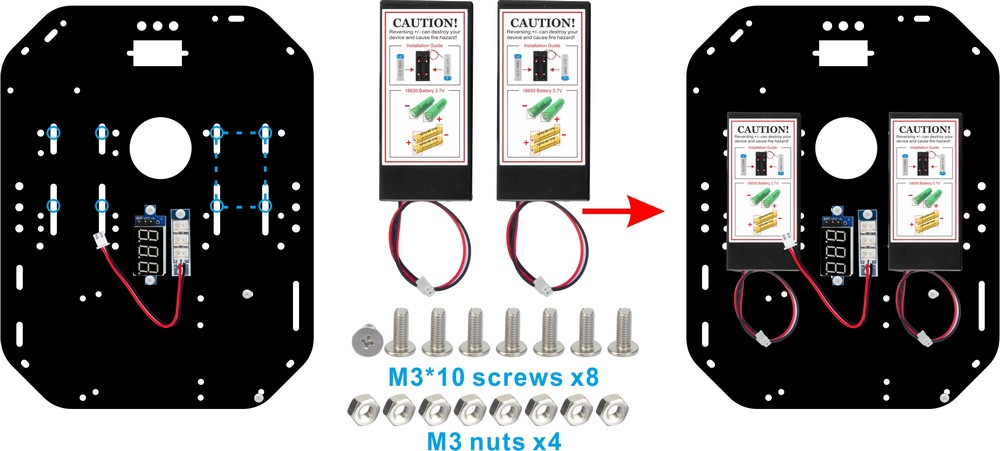
Passo 8. Installate 2 portabatterie sul telaio del secondo strato con 4 viti M3x10 e dadi, come mostrato nelle immagini seguenti.
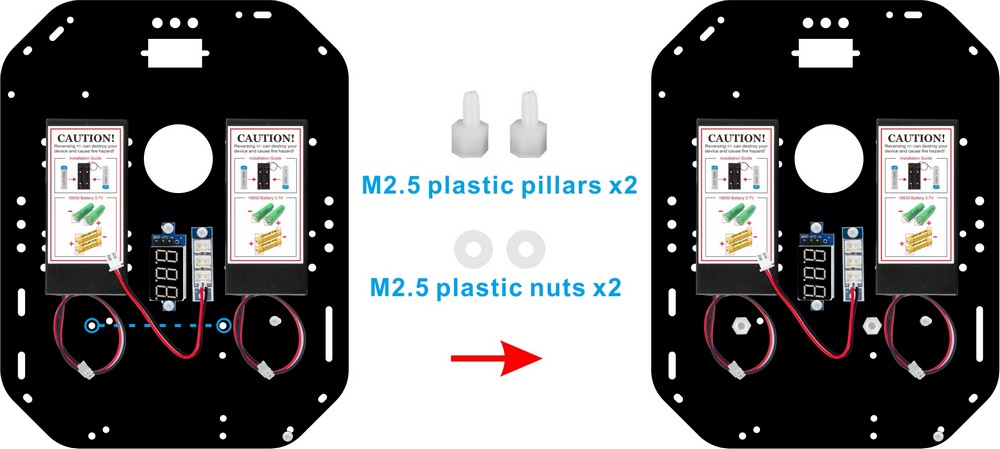
Passo 9. Installate 2 distanziali e dadi in plastica M2.5 sul telaio del secondo strato (acrilico) come segue:
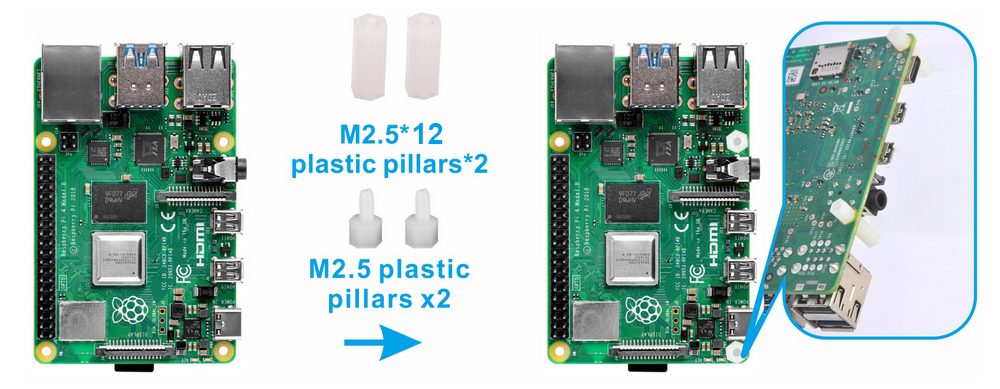
Passo 10. Fate passare un distanziale in plastica M2.5 attraverso il Raspberry Pi e un distanziale in plastica M2.5×12 dal basso verso l’alto come segue:
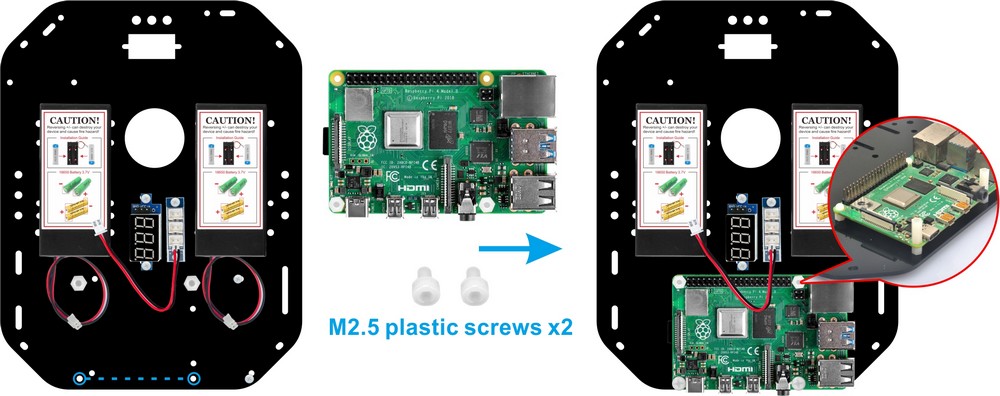
Passo 11. Fissate 2 viti in plastica M2.5 sotto il telaio e 2 viti in plastica M2.5 sul Raspberry Pi come segue:
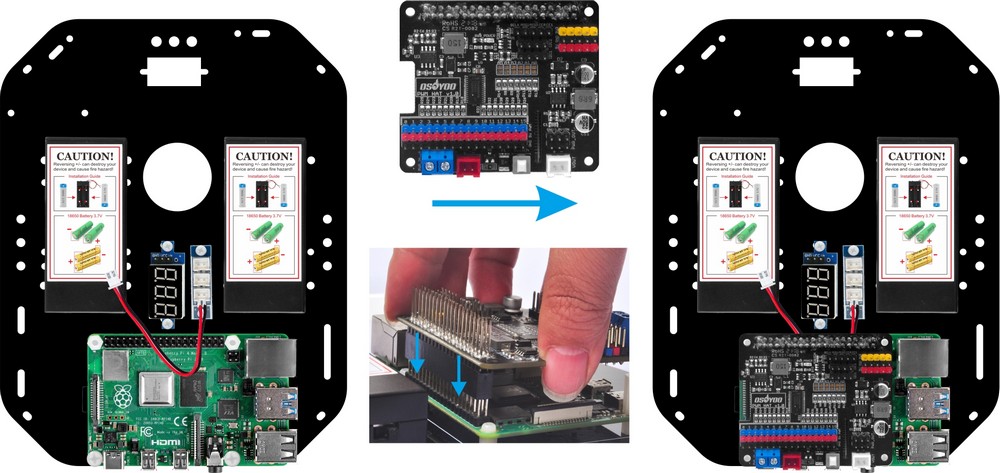
Passo 12. Inserite l’OSOYOO PWM Hat sul Raspberry Pi come segue:
Collegamento dei cavi
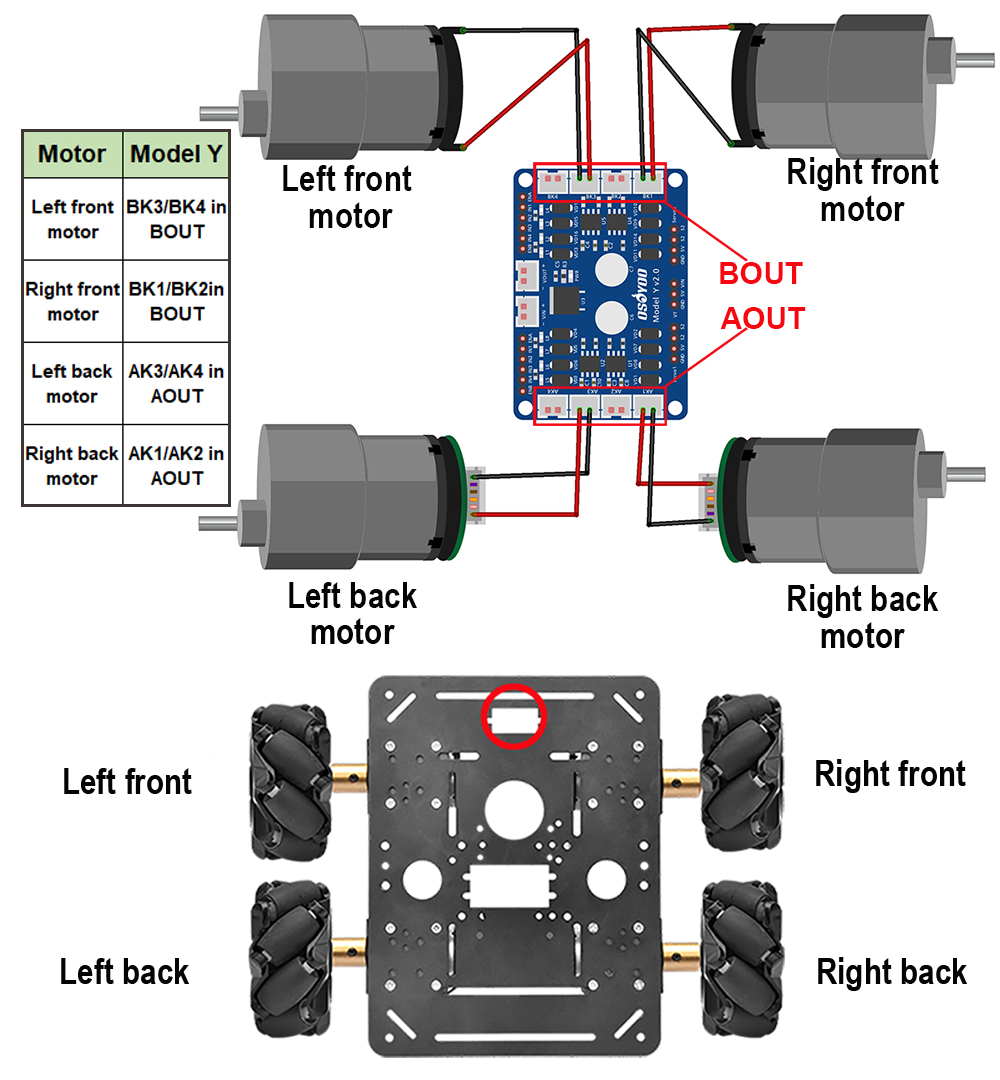
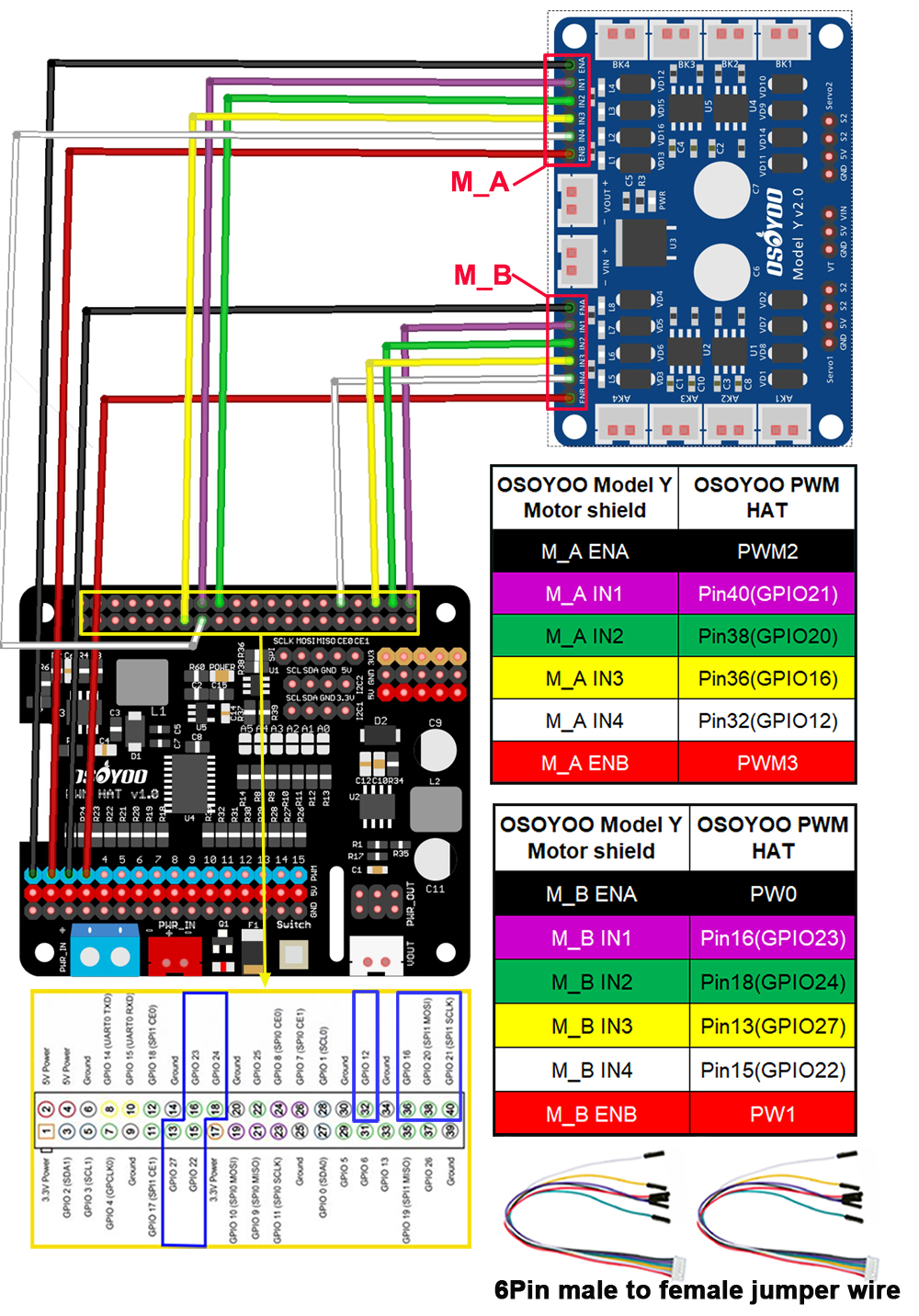
1. Collegate i 4 motori alla scheda driver Model Y come mostrato nelle immagini seguenti.
2. Collegate M_A ENA, ENB del Model Y a PWM2, PWM3 dell’OSOYOO PWM hat, e M_A IN1, IN2, IN3, IN4 a Pin40(GPIO21), Pin38(GPIO20), Pin36(GPIO16), Pin 32(GPIO12).
Collegate M_B ENA, ENB del Model Y a PWM0, PWM1 dell’OSOYOO PWM hat, e M_B IN1, IN2, IN3, IN4 a Pin16(GPIO23), Pin18(GPIO24), Pin13(GPIO27), Pin 15(GPIO22).
Attenzione:
Quando inserite o rimuovete il connettore parallelo a 6 pin nella presa maschio a 6 pin del Model Y, tenete sempre il supporto bianco in plastica. Non tirate mai i fili per sfilare il connettore, altrimenti si danneggiano i cavi.
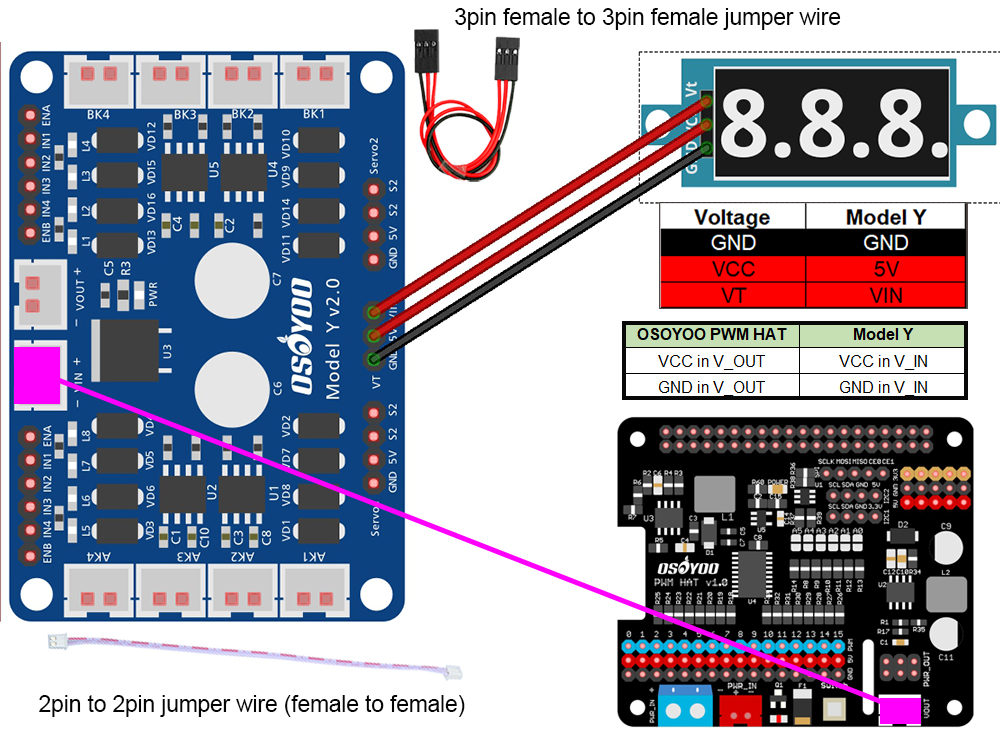
3. Collegate il voltmetro alla scheda driver motore Model Y con il cavo jumper femmina-femmina a 3 pin; collegate la presa V_OUT dell’OSOYOO PWM hat alla presa VIN della scheda driver motore Model Y con un cavo jumper a 2 pin femmina-femmina:
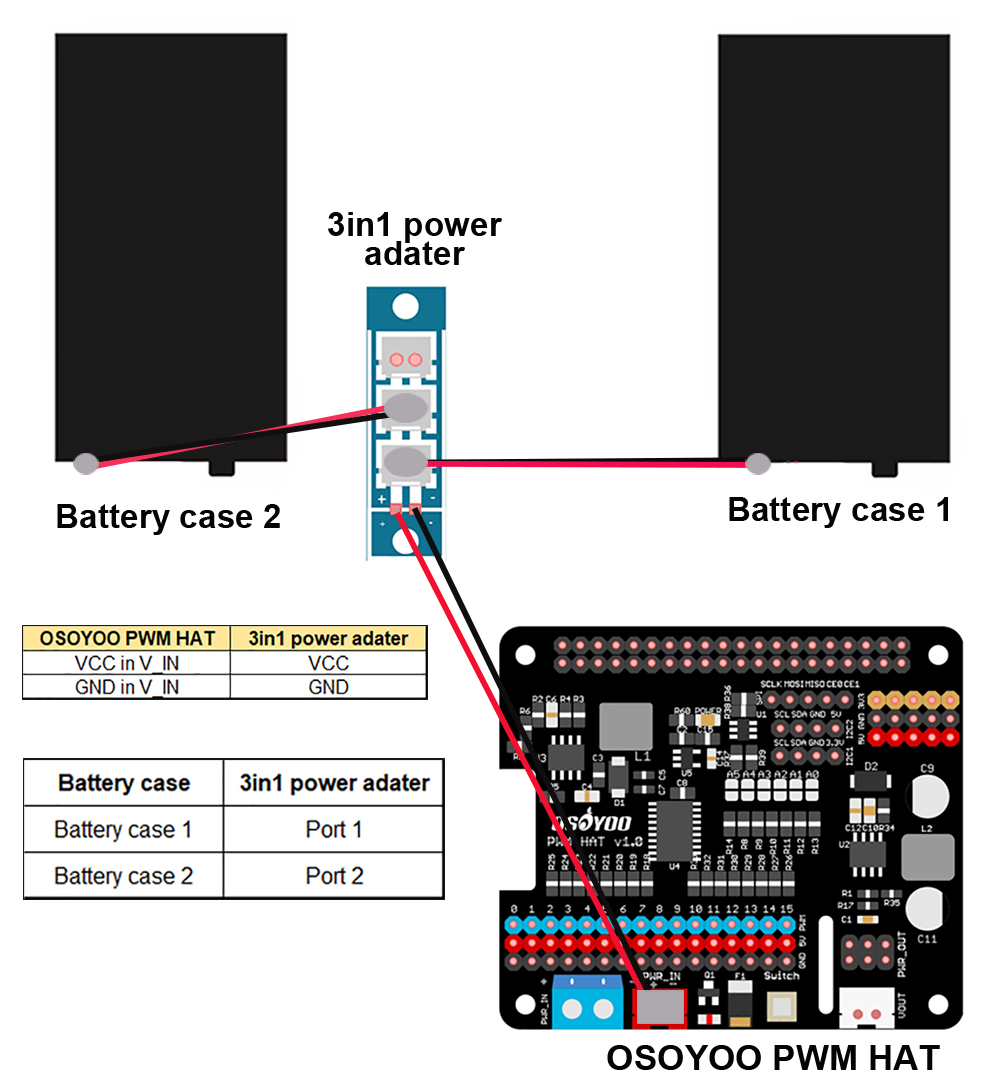
4. Inserite i connettori a 2 pin dei portabatterie nell’adattatore di alimentazione 3 in 1; inserite il connettore a 2 pin dell’adattatore 3 in 1 nella presa V_IN dell’OSOYOO PWM hat come segue:
Nota: l’adattatore 3 in 1 è progettato per più portabatterie con la stessa tensione.
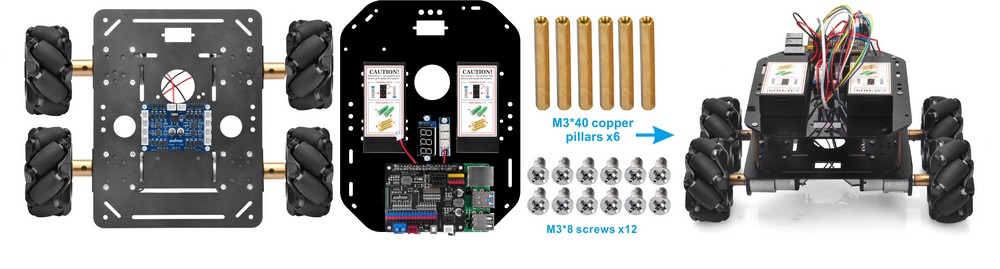
5. Montate il telaio del secondo strato sul telaio del primo strato con i distanziali M3x40. Fate attenzione al fronte e al retro del telaio in acrilico e di quello in metallo. Il robot car è già funzionante al termine di questo passaggio.
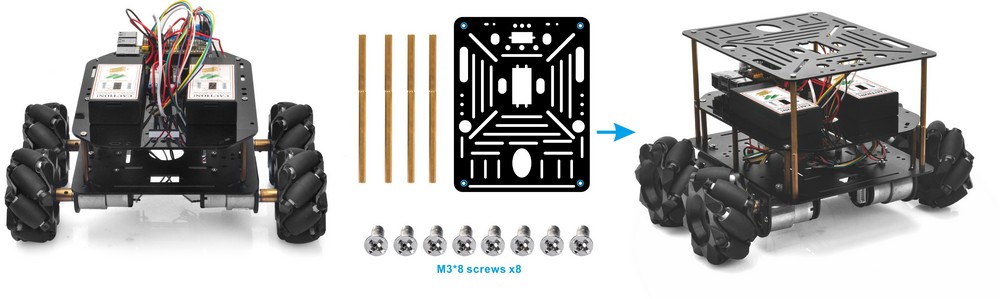
6. Se volete aggiungere ulteriori sensori, potete installare il telaio del terzo strato sul robot car. Per prima cosa avvitate saldamente il distanziale in rame M3x40 con il distanziale M3x65+6 per ottenere un distanziale lungo, poi montate il telaio del terzo strato sul telaio del primo strato usando questi distanziali lunghi.
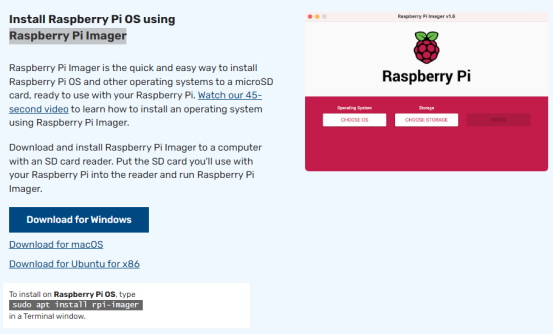
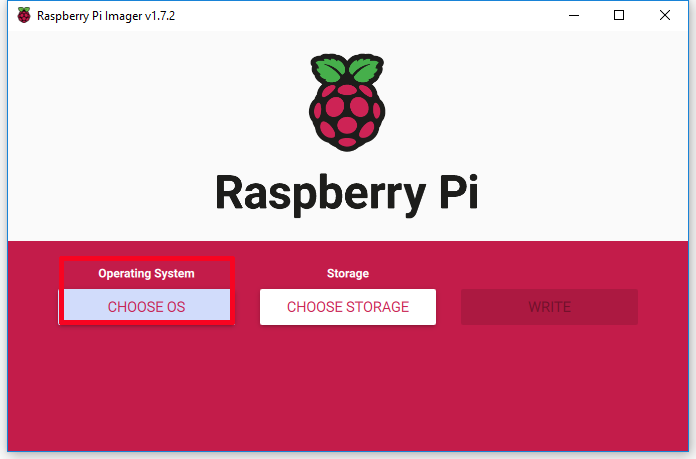
Installazione del sistema operativo con Raspberry Pi Imager
Nota: in questo esempio utilizziamo Raspberry Pi Imager v1.7.2. Le versioni più recenti potrebbero presentare alcune differenze.
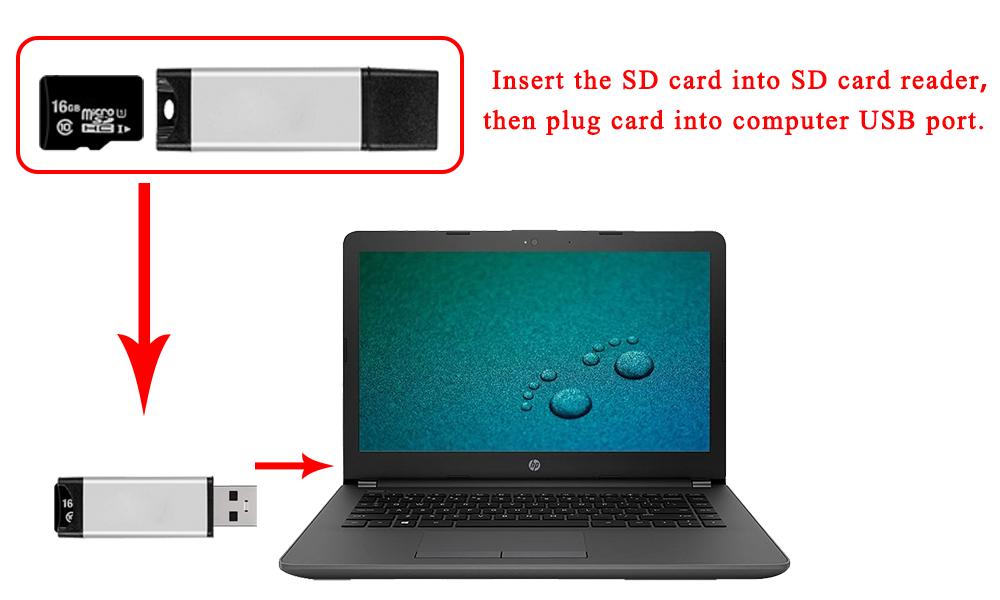
Passo 1: Preparate una scheda micro SD (scheda TF) formattata di recente con un lettore USB micro SD. Le dimensioni consigliate sono 16 GB e 32 GB. (saltate questo passo se la vostra scheda SD ha già un’immagine di Raspbian OS preinstallata).
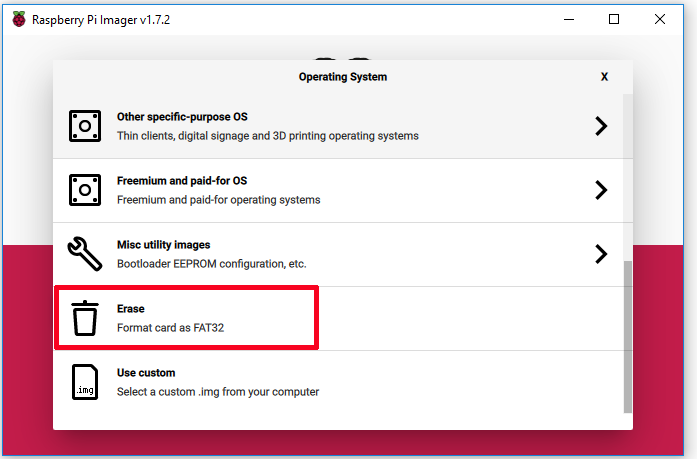
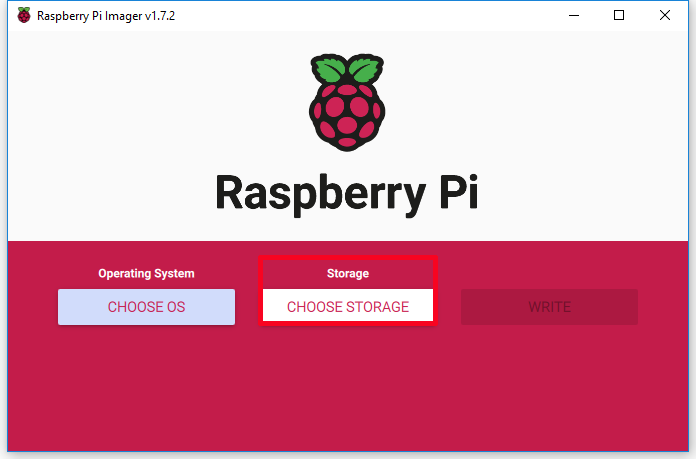
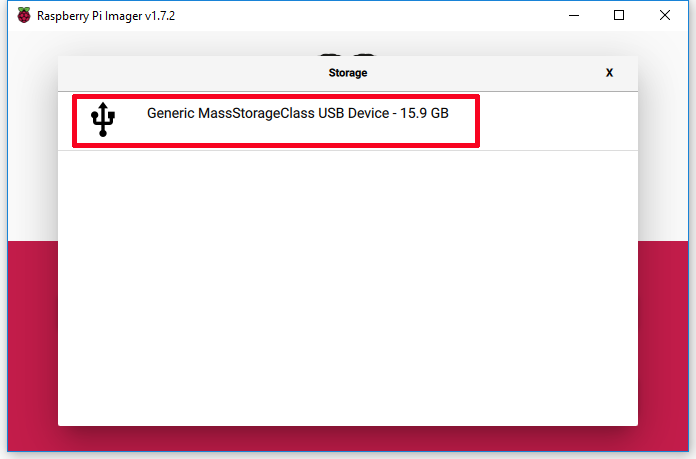
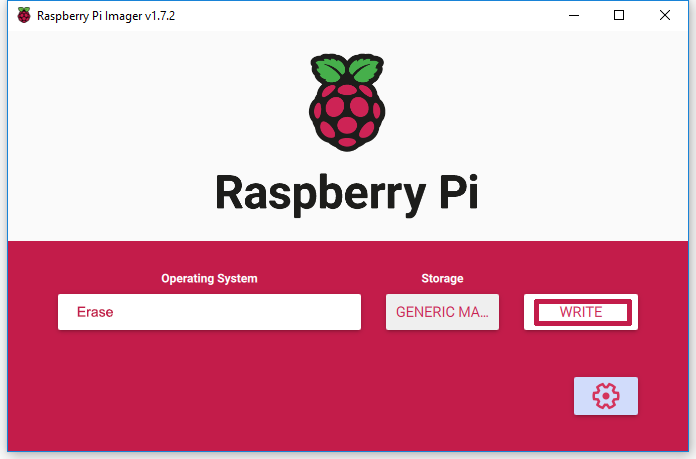
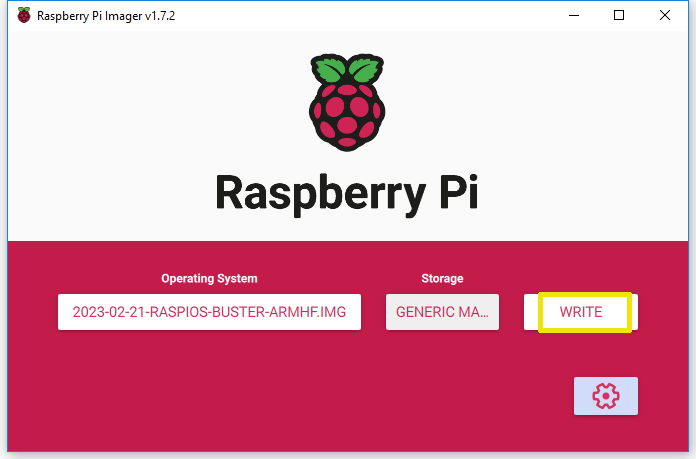
Passo 3): Se non sapete come formattare la scheda micro SD, avviate Raspberry Pi Imager, selezionate “Erase” nel campo Sistema operativo e “la vostra scheda micro SD” nel campo Archiviazione, quindi cliccate su “WRITE” per formattare la scheda micro SD.
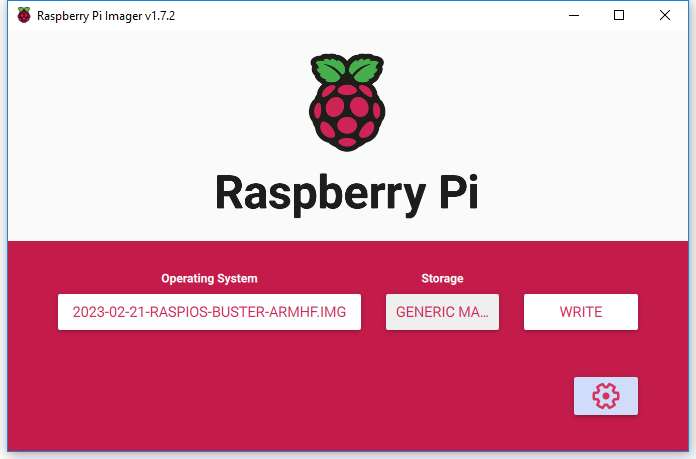
Passo 4): Avviate Raspberry Pi Imager, selezionate “Use custom” nel campo Sistema operativo e navigate fino all’immagine “Raspberry Pi OS” che avete scaricato, poi selezionate “la vostra scheda SD” nel campo Archiviazione. (Se avete già scritto Raspberry Pi OS sulla vostra scheda SD, saltate dal passo 3 al passo 5.)
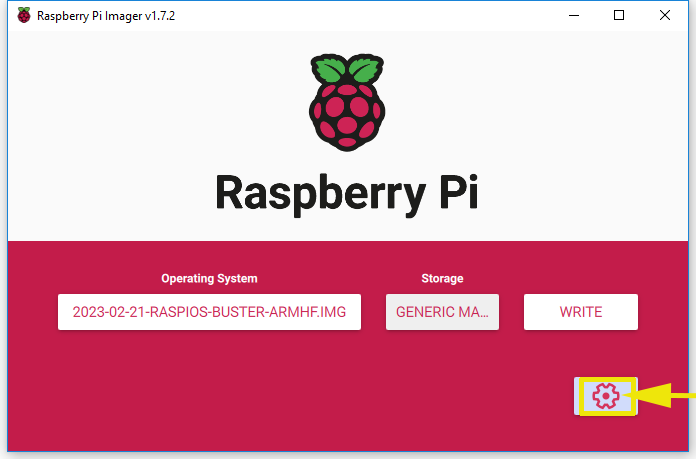
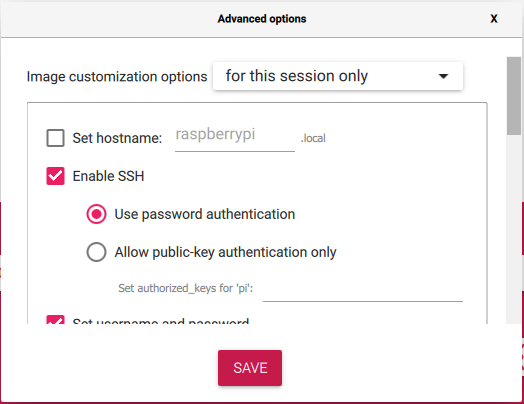
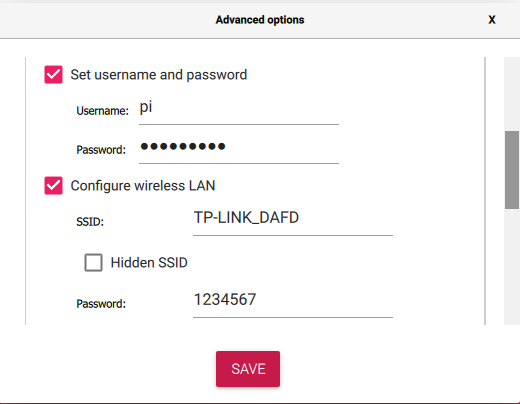
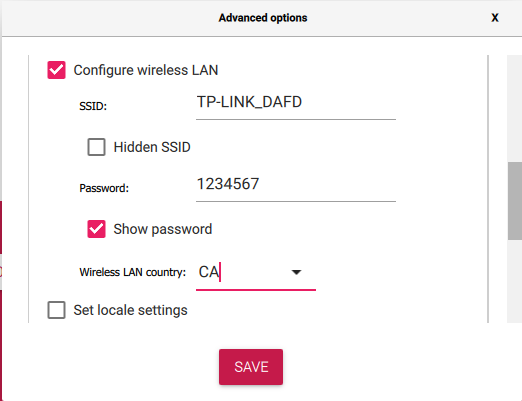
Passo 5): Cliccate sull’“icona delle impostazioni” per abilitare SSH, impostate il nome utente e la password (qui usiamo pi come nome utente e raspberry come password) e configurate la rete WLAN. Poi cliccate su “SAVE”.
Passo 6): Cliccate su WRITE per scrivere il sistema operativo (Raspberry Pi OS) sulla vostra scheda micro SD.
Controllo remoto di Raspberry Pi
Passo 1: Trovate l’indirizzo IP
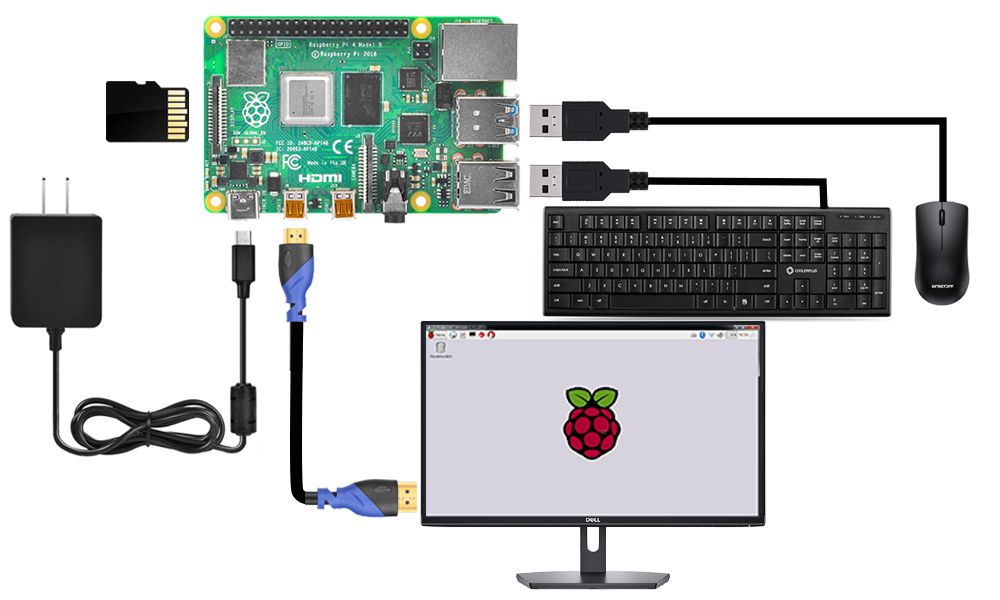
1. Collegate Raspberry Pi al vostro monitor HDMI o televisore. Inserite una tastiera e un mouse nelle porte USB di Raspberry Pi. Inserite la scheda SD con il sistema operativo installato nello slot sul Raspberry Pi (se avete già assemblato il vostro robot car con Raspberry Pi, collegatelo a un monitor e trovate l’indirizzo IP).
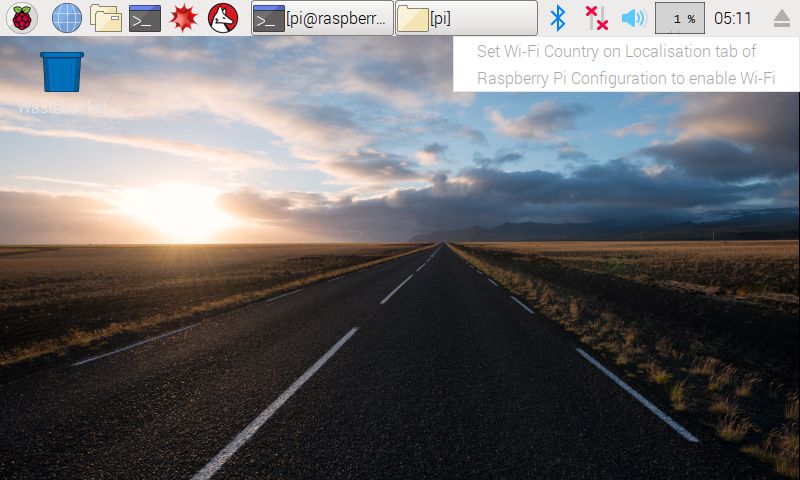
2. Se passate il cursore sull’icona della rete LAN, comparirà una notifica come quella seguente:
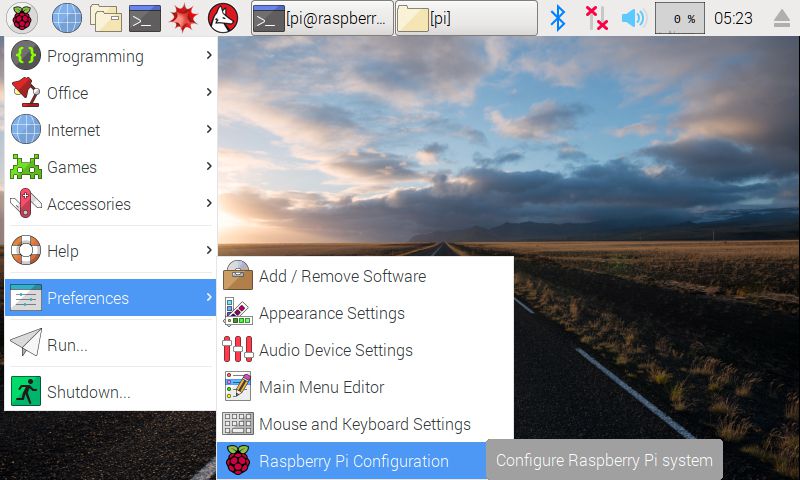
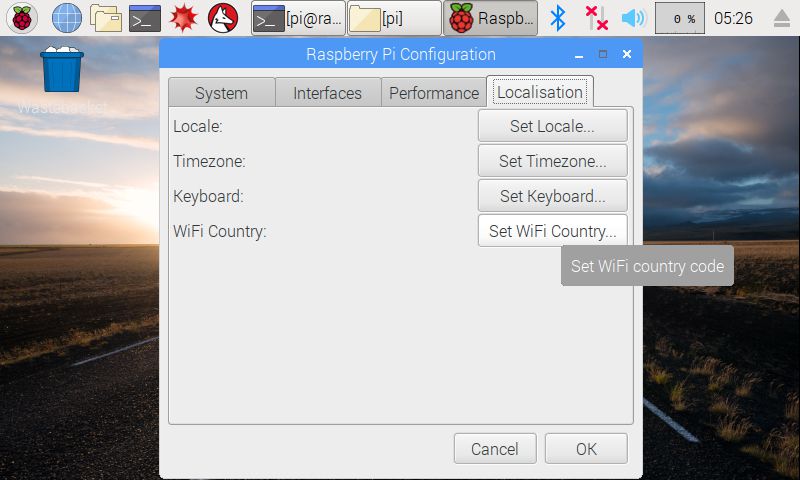
3. Cliccate per configurare la localizzazione WIFI come segue:
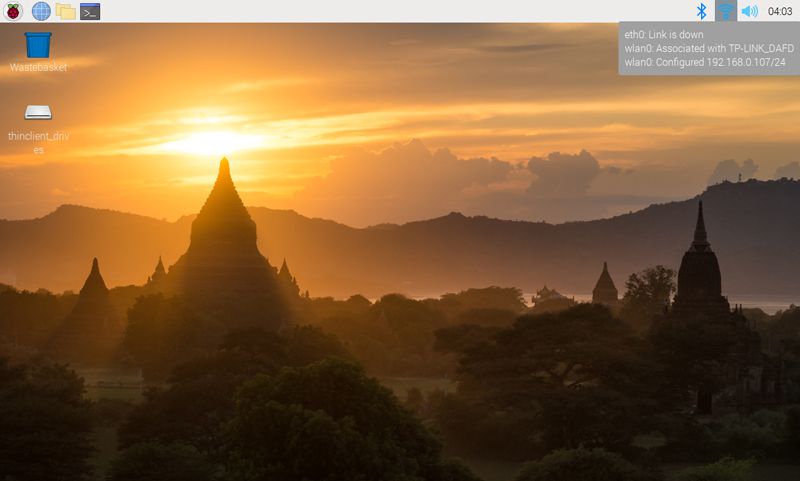
4. Trovate l’indirizzo IP del Raspberry Pi. Metodo A: Collegate il Pi a un monitor con mouse, cliccate sull’icona LAN o WIFI per ottenere l’indirizzo IP come mostrato nella foto seguente.
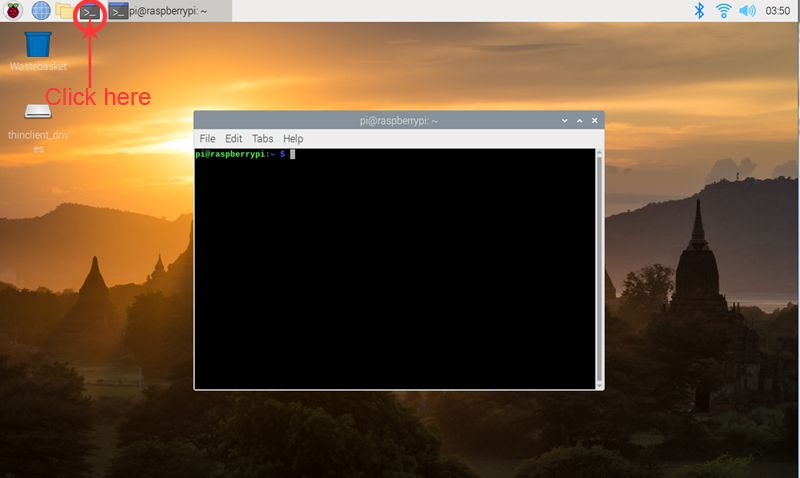
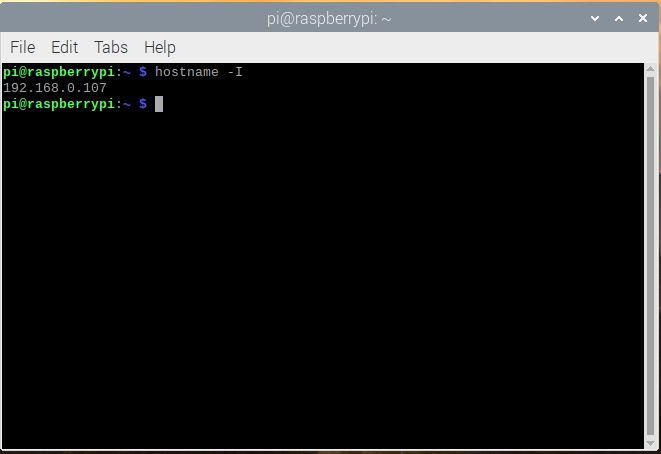
Metodo B: Cliccate sull’icona del Terminale sullo schermo, poi digitate il seguente comando nella finestra del terminale per ottenere l’indirizzo IP:
hostname -I
Passo 2: Utilizzate uno strumento SSH per controllare Raspberry Pi da remoto
Nota:
1) Per saperne di più su come usare uno strumento SSH per controllare Raspberry Pi da remoto, visitate il link: https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) Nelle nostre lezioni di esempio utilizziamo un PC Windows come console remota e PuTTY come strumento SSH
1. Inserite la scheda SD con il sistema operativo nel Raspberry Pi (Attenzione: spegnete prima il Raspberry Pi), poi accendete il robot car.
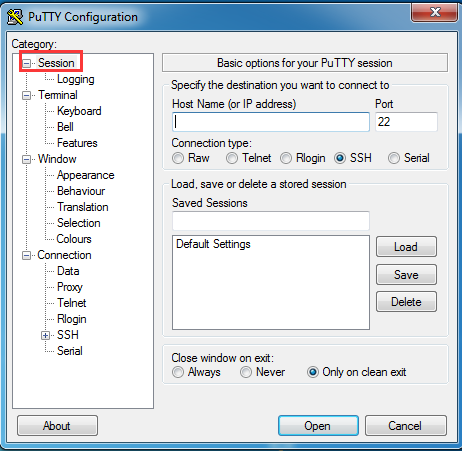
3. Aprite PuTTY e cliccate su Session nel pannello ad albero sulla sinistra (di solito è chiuso all’avvio di PuTTY):
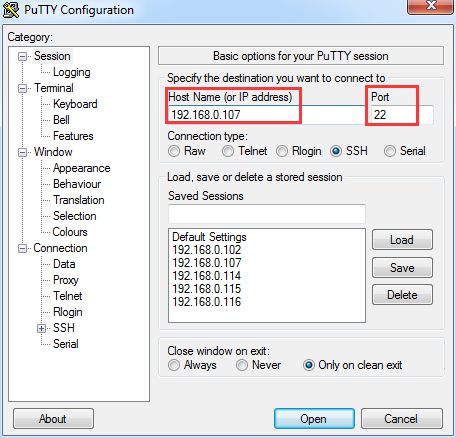
4. Inserite l’indirizzo IP ottenuto nel campo Host Name (o IP address) e 22 nel campo Port (il valore predefinito è 22), poi cliccate su Open.
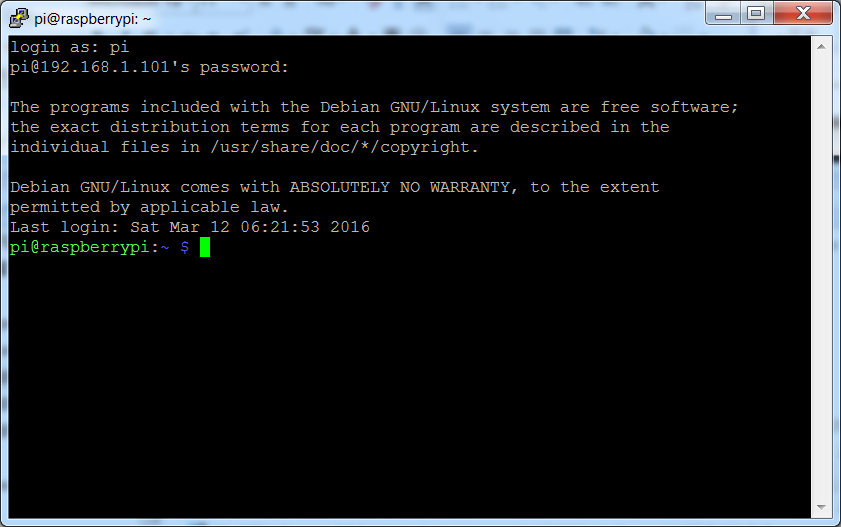
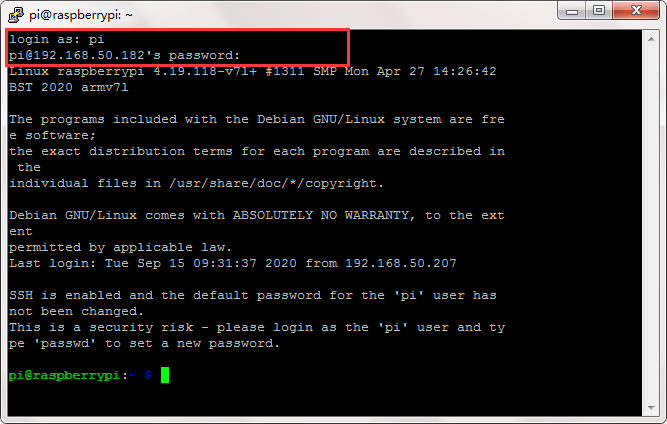
5. La prima volta che accedete al Raspberry Pi tramite indirizzo IP, comparirà un avviso di sicurezza. Cliccate semplicemente su Yes. Quando la finestra di PuTTY vi chiede il nome utente (login as:), digitate pi; come password digitate raspberry (quella predefinita, se non l’avete cambiata). Nota: mentre digitate la password, la finestra non mostra nulla, ma il testo viene comunque inserito. Quindi digitate con attenzione e premete Invio. Dopo aver effettuato l’accesso al Raspberry Pi, la finestra mostrerà quanto segue:
Passo 4: Digitate il seguente comando per scaricare il codice di esempio.
wget https://osoyoo.com/driver/mecanum/mecanum.py
Passo 5: Posizionate il robot car sul pavimento ed eseguite il seguente comando:
python mecanum.py
Dopo aver avviato il programma Python, i motori si muoveranno in avanti per 0,75 secondi, poi indietro per 0,75 secondi, poi a sinistra per 0,75 secondi e a destra per 0,75 secondi, poi si sposteranno a destra, poi a sinistra, poi eseguiranno alcuni movimenti omnidirezionali e si fermeranno.
Risoluzione dei problemi:
Se state usando Bookworm OS e, durante l’esecuzione di mecanum.py, ottenete un messaggio di errore come il seguente:
GPIO.setup(IN1, GPIO.OUT)
^^^^^^^^^^^^^^^^^^^^^^^^^
RuntimeError: Cannot determine SOC peripheral base address
Questo messaggio indica che la libreria rpi.gpio non è compatibile con Bookworm OS. Dovete reinstallare la libreria rpi.gpio per Pi 5 con il seguente comando:









































{kind=link}
{kind=link}