Le kit OSOYOO FlexiRover est une voiture robot à roues Mecanum haute performance et polyvalente, conçue pour les passionnés de Raspberry Pi (dès 15 ans) ayant déjà des bases en montage robotique et en programmation. Ce kit est compatible avec Raspberry Pi 2, 3, 4 et le tout dernier Raspberry Pi 5. Il offre une base solide pour construire des robots personnalisés, avec un accent sur la flexibilité, la durabilité et l’innovation. Le kit comprend un système moteur puissant, de nombreuses possibilités d’extension et une capacité de charge élevée, ce qui le rend adapté au développement robotique avancé. La carte Raspberry Pi n’est pas incluse, mais le kit fournit tous les composants nécessaires pour assembler un châssis de robot fonctionnel. Moteurs puissants, roues Mecanum et châssis personnalisable en font une plateforme idéale pour de nombreuses applications. Conçu pour les développeurs, ce kit permet d’explorer, d’innover et de concrétiser vos idées robotiques. Que ce soit pour l’éducation, la recherche ou des projets personnels, le FlexiRover est le choix parfait pour construire des robots haute performance.
Caractéristiques principales de la voiture robot à roues Mecanum
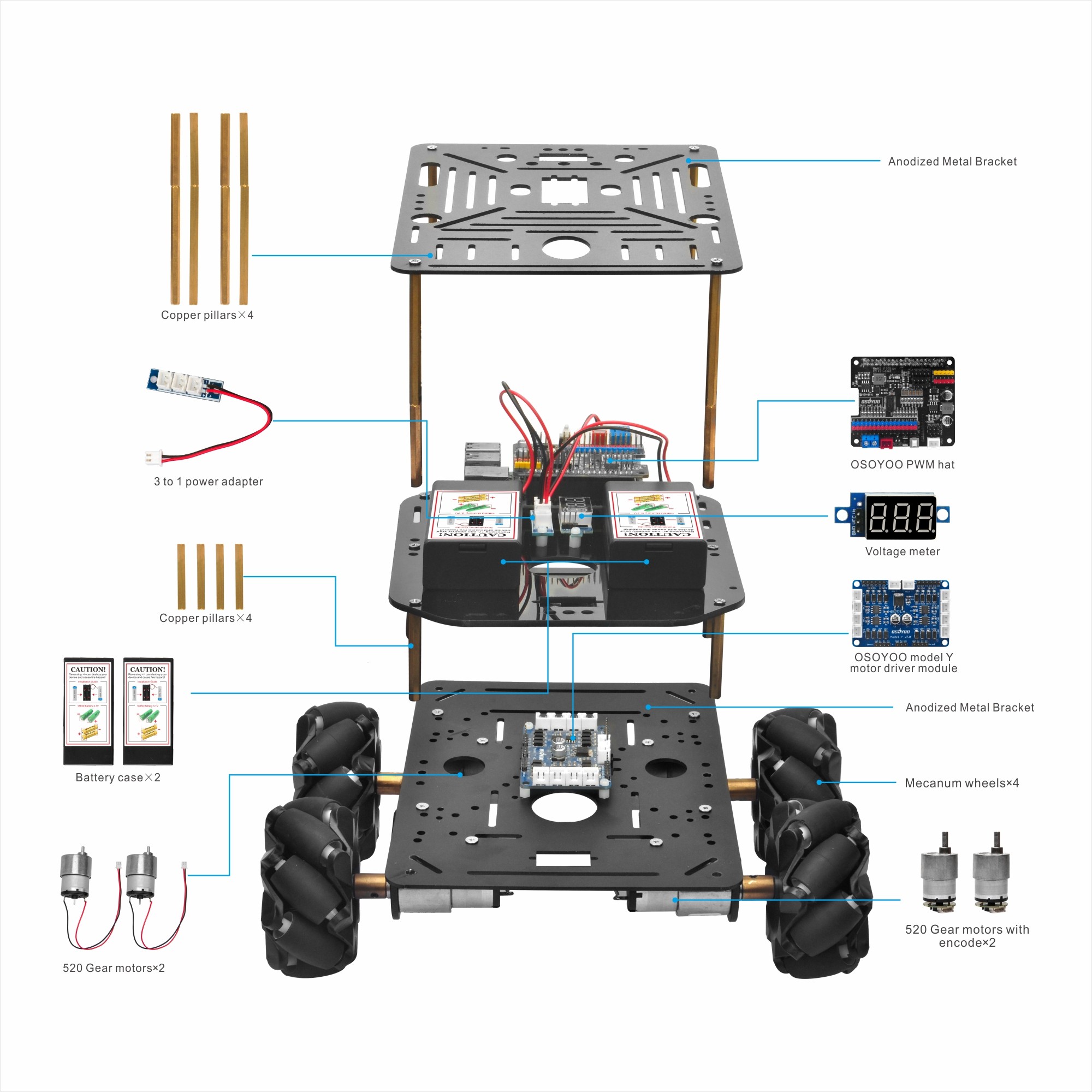
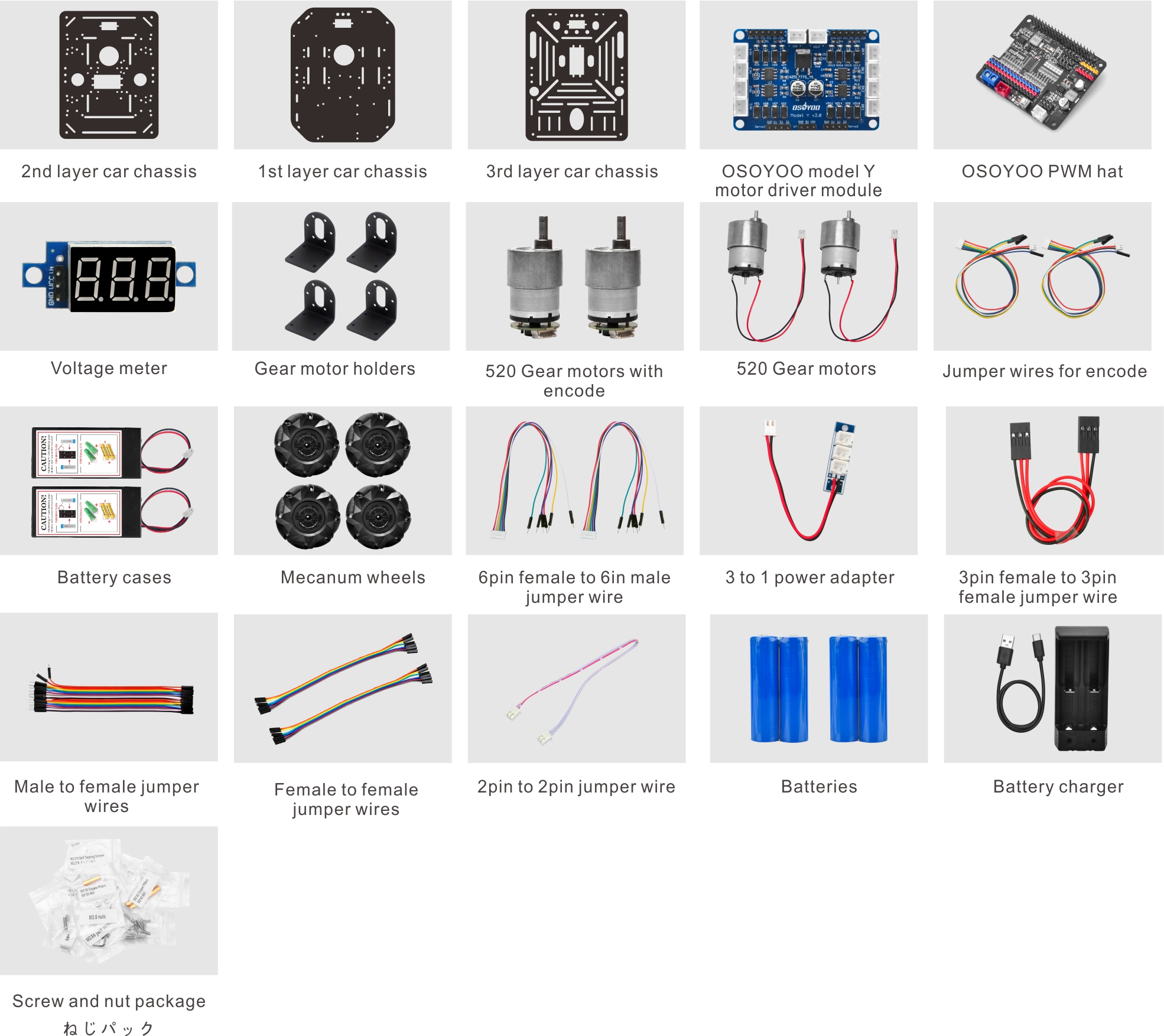
Large compatibilité —- Conçu pour fonctionner parfaitement avec Raspberry Pi 2, 3, 4 et 5, la carte d’extension incluse étend les capacités du Pi et prend en charge jusqu’à 16 servomoteurs pour des applications robotiques avancées.
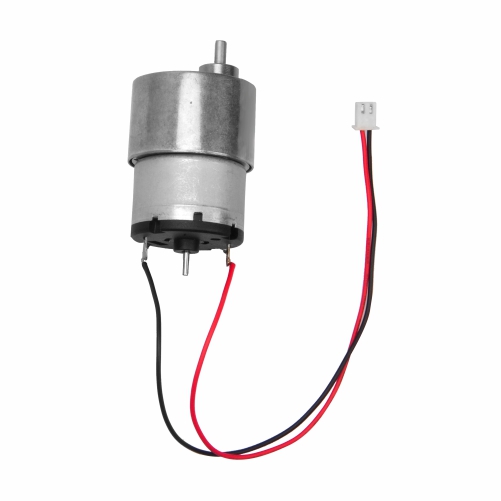
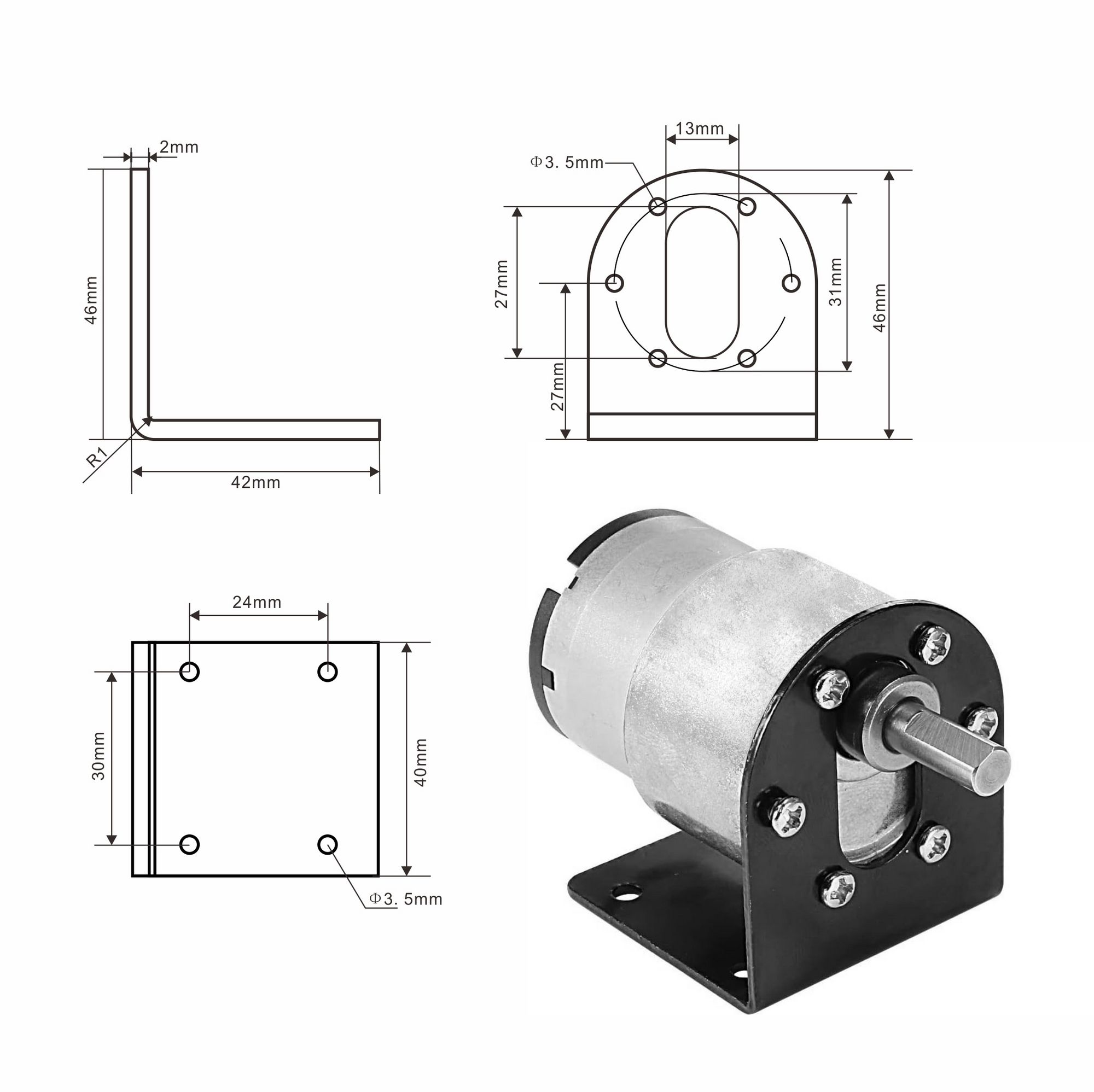
Moteurs 520 haute qualité —- Quatre moteurs 520 garantissent un fonctionnement fluide ; deux d’entre eux sont équipés d’encodeurs pour un contrôle précis des mouvements, indispensable pour la navigation et les tâches complexes.
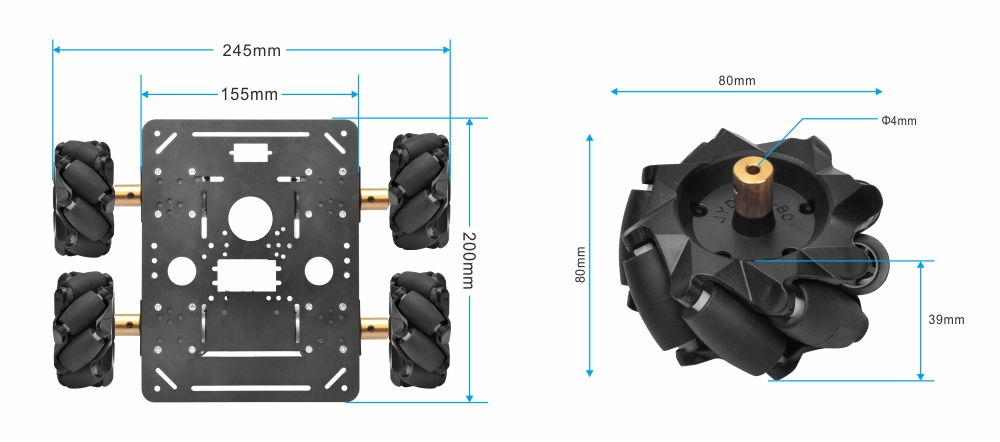
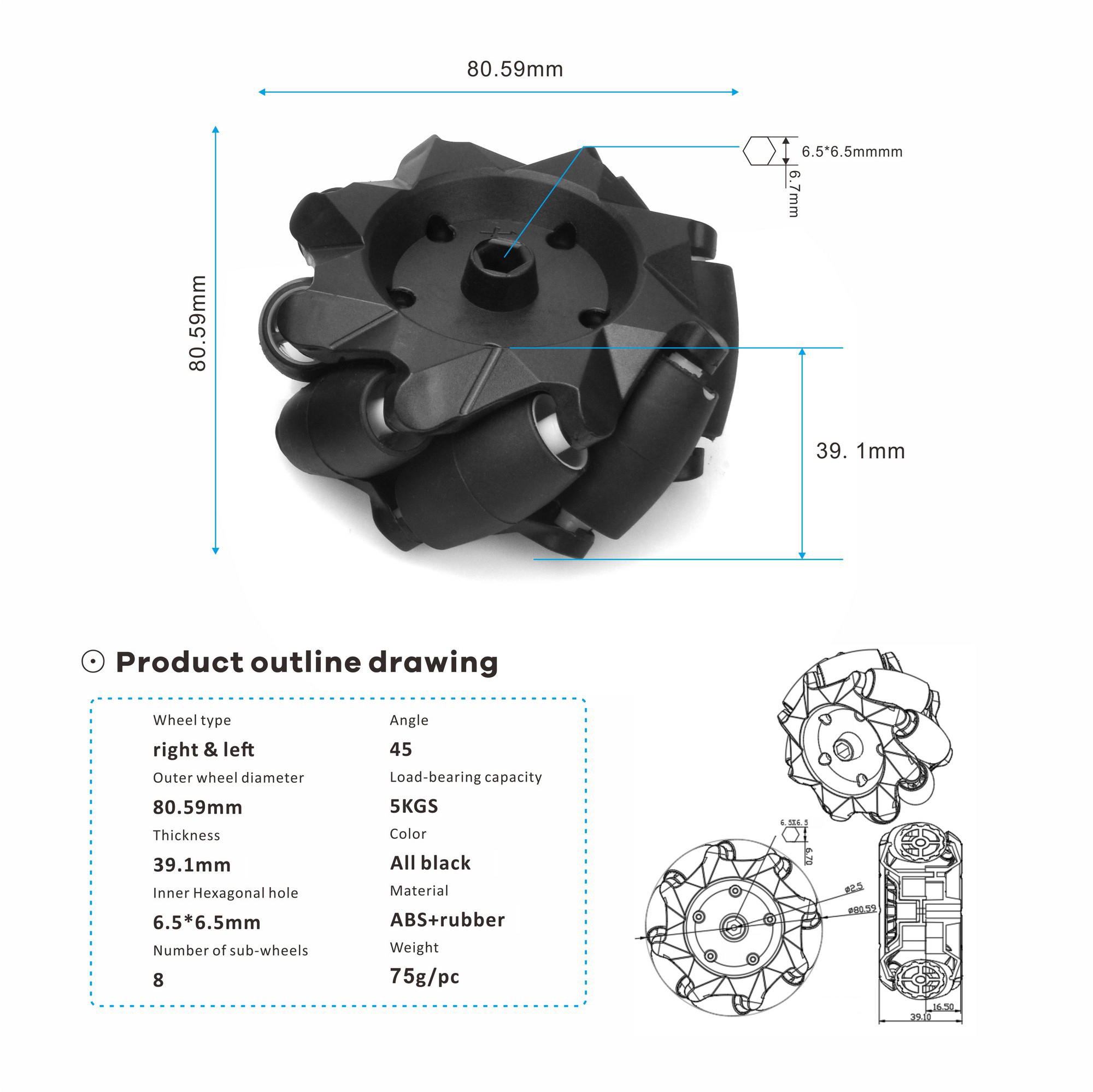
Roues Mecanum omnidirectionnelles —- Quatre roues Mecanum permettent de se déplacer dans toutes les directions, offrant une maniabilité exceptionnelle pour un positionnement précis et des applications variées.
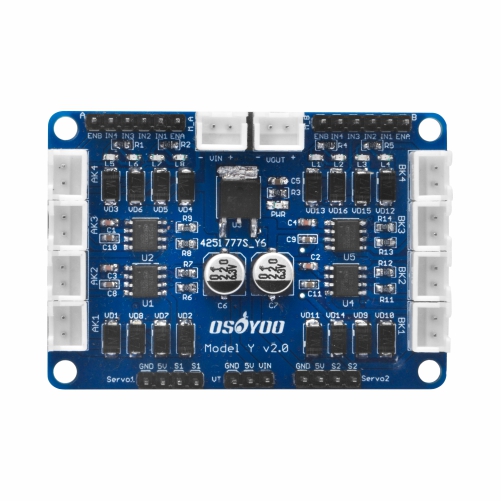
Driver moteur robuste —– Le driver moteur OSOYOO Model Y gère quatre canaux moteur indépendants, garantissant des performances fiables même sous forte charge.
Gestion d’alimentation fiable —- Équipé de deux boîtiers de batteries avec interrupteurs, le kit assure une alimentation stable, même pour les besoins en courant élevés du Raspberry Pi 5 ; batteries rechargeables et chargeur sont inclus.
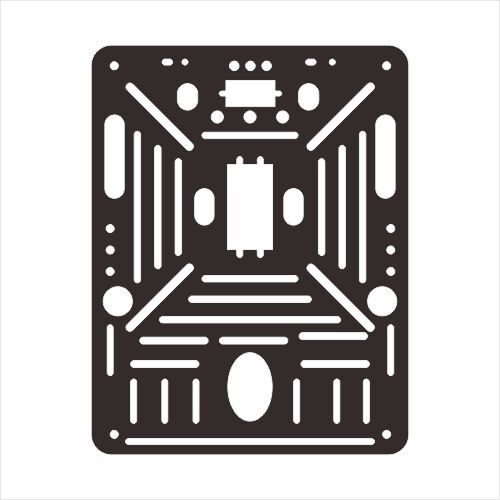
Châssis personnalisable —- Le châssis préperforé accepte des accessoires tels que des capteurs, des bras mécaniques et des caméras, permettant une personnalisation poussée pour divers projets.
Conception robuste —- Capable de supporter jusqu’à 2,5 kg, le FlexiRover offre une base solide pour le développement robotique avancé.
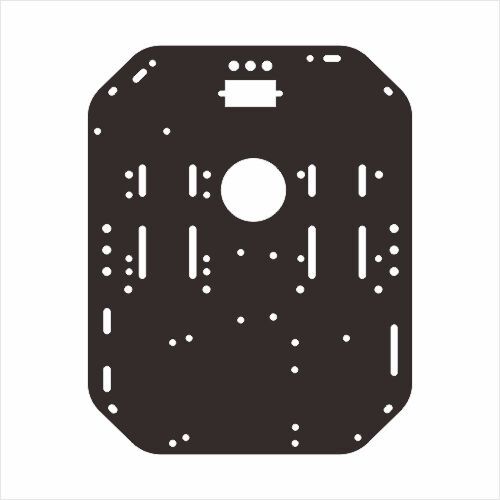
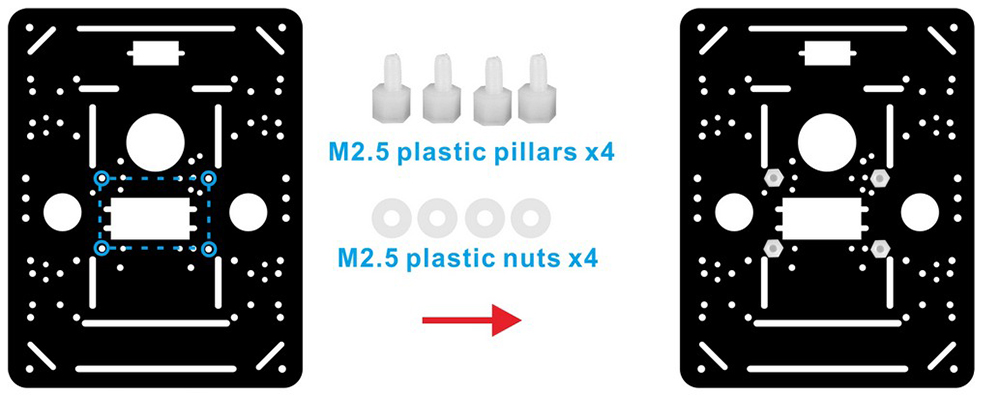
Étape 1. Installez d’abord 4 entretoises plastique M2.5 sur le châssis 1ère couche (métal), comme illustré ci-dessous. (Remarque : ces quatre entretoises sont destinées au driver moteur OSOYOO Model Y, car il serait trop difficile d’installer les entretoises si les moteurs étaient déjà en place) :
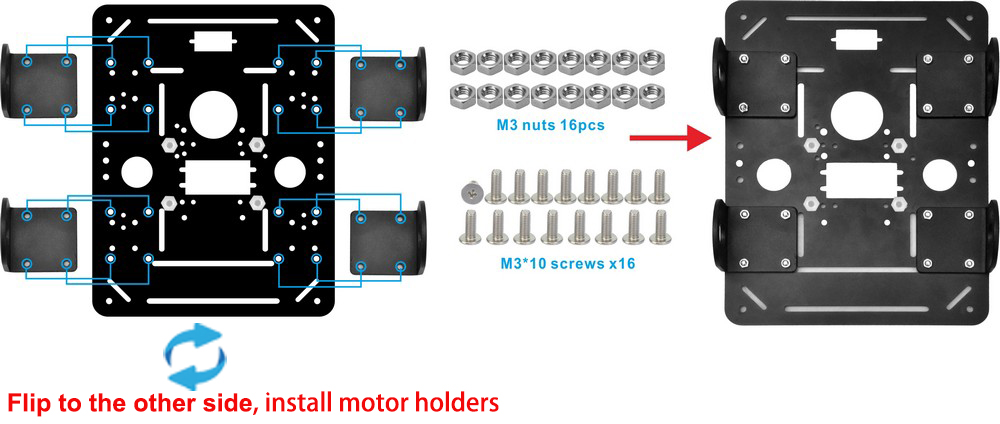
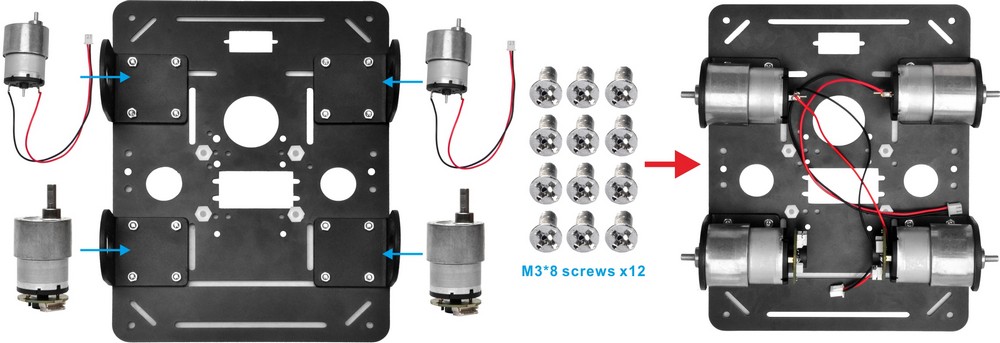
Étape 2. Retournez le châssis 1ère couche et fixez les supports moteur avec des vis M3*10 et des écrous M3, comme illustré ci-dessous.
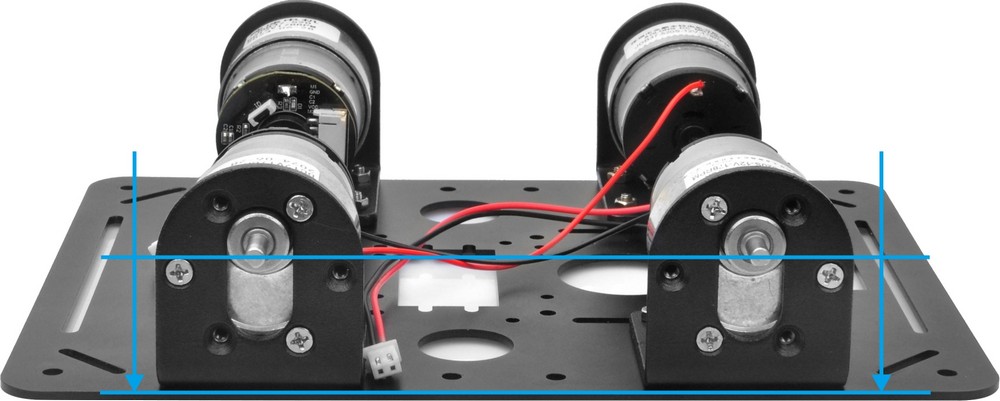
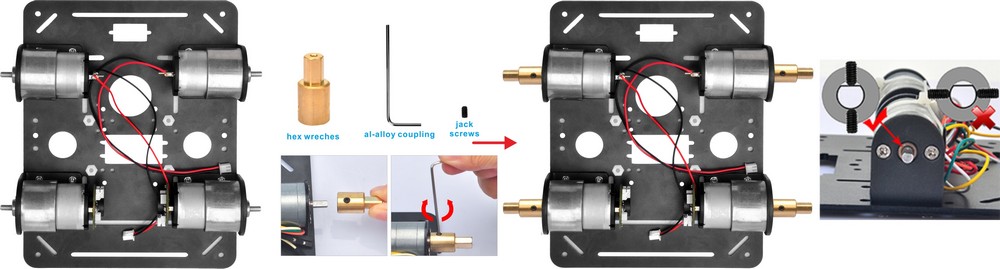
Remarque : Assurez-vous que les 4 axes moteur sont bien alignés au même niveau.
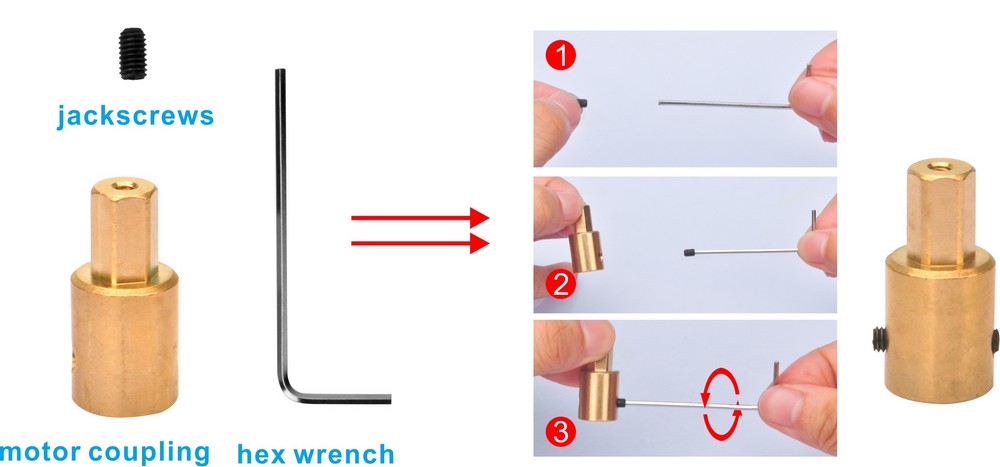
Étape 4. Insérez les vis de serrage dans l’accouplement en alliage d’aluminium et serrez-les pour fixer l’accouplement sur le moteur, comme illustré ci-dessous. Remarque : l’axe du moteur réducteur 520 comporte un méplat. Assurez-vous qu’une des vis de serrage est positionnée sur ce méplat, puis serrez les deux vis sur l’axe.
Étape 5. Montez les 4 roues Mecanum sur les accouplements en alliage d’aluminium à l’aide de 4 vis M2.5*20, comme illustré ci-dessous :
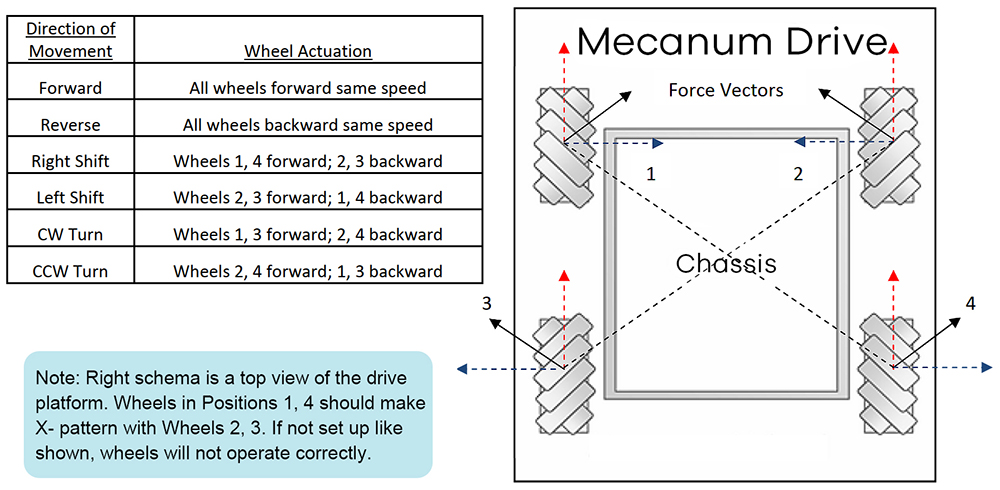
Remarque : il existe deux types de roues Mecanum, gauche et droite ; la différence réside dans l’orientation des galets. Une configuration correcte exige que chacune des quatre roues soit positionnée comme indiqué ci-dessous, l’axe de rotation du galet supérieur de chaque roue pointant vers le centre de la plateforme. Notez que toutes les analyses dynamiques et les programmes fournis reposent sur cette configuration.
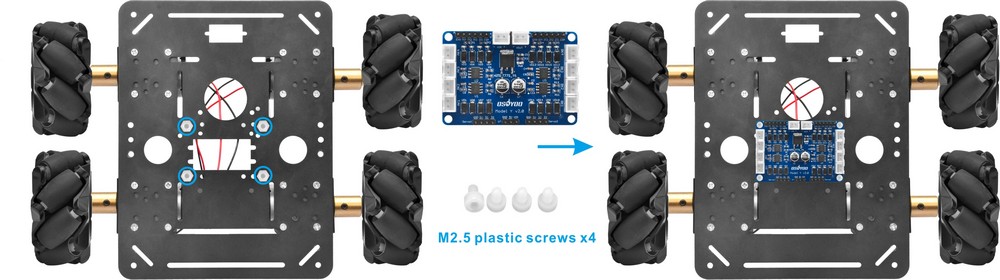
Étape 6. Fixez le module driver moteur OSOYOO Model Y sur le châssis 1ère couche à l’aide de vis plastique M2.5, comme illustré ci-dessous :
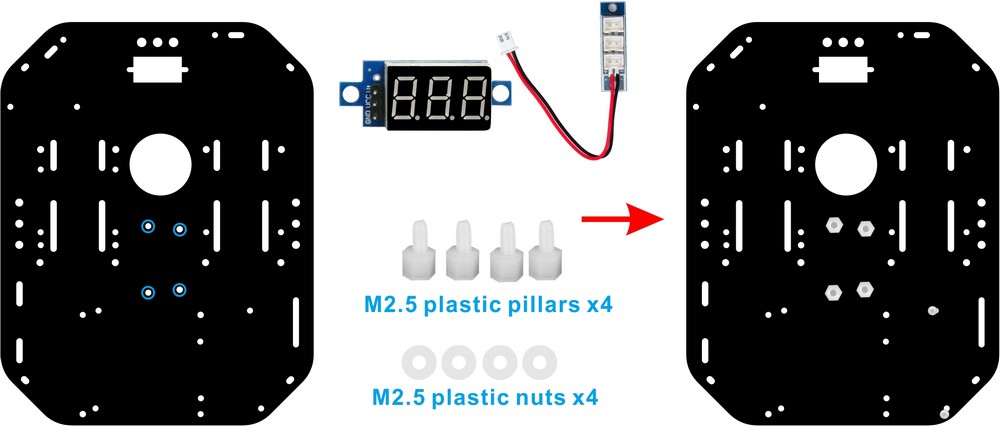
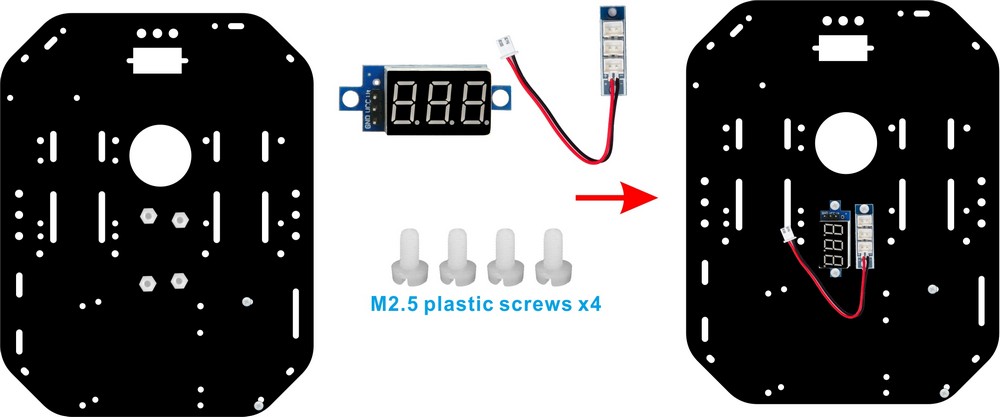
Étape 7. Installez 4 entretoises plastique M2.5 et des écrous sur le châssis 2e couche (acrylique), puis fixez l’adaptateur d’alimentation 3-en-1 et le voltmètre avec des vis plastique M2.5, comme illustré ci-dessous :
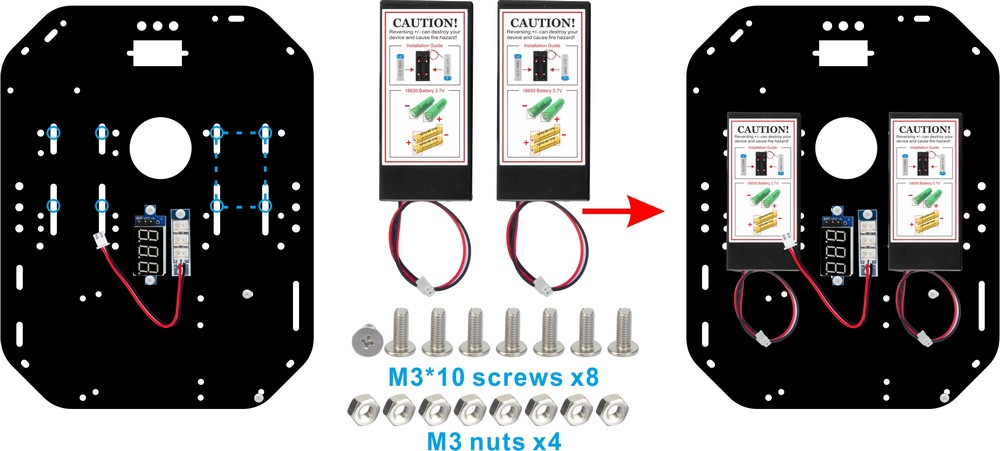
Étape 8. Fixez 2 boîtiers de batteries sur le châssis 2e couche à l’aide de 4 vis M3x10 et d’écrous, comme illustré ci-dessous.
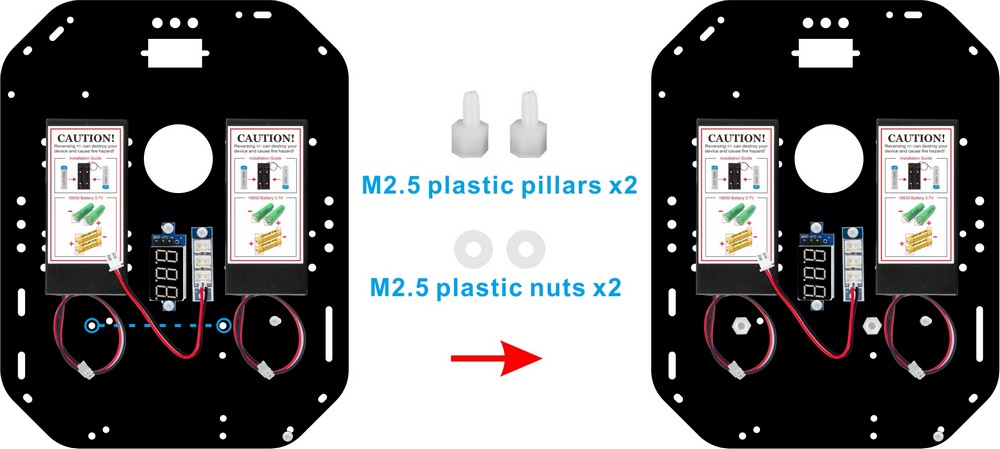
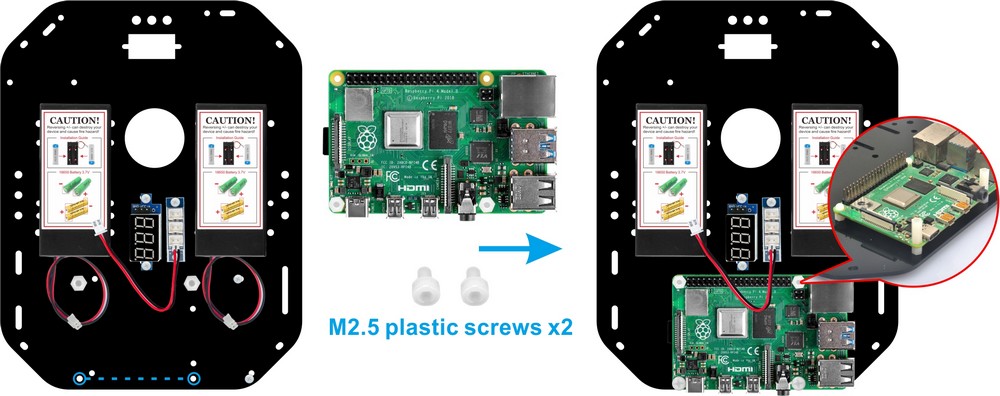
Étape 9. Installez 2 entretoises plastique M2.5 et des écrous sur le châssis 2e couche (acrylique), comme suit :
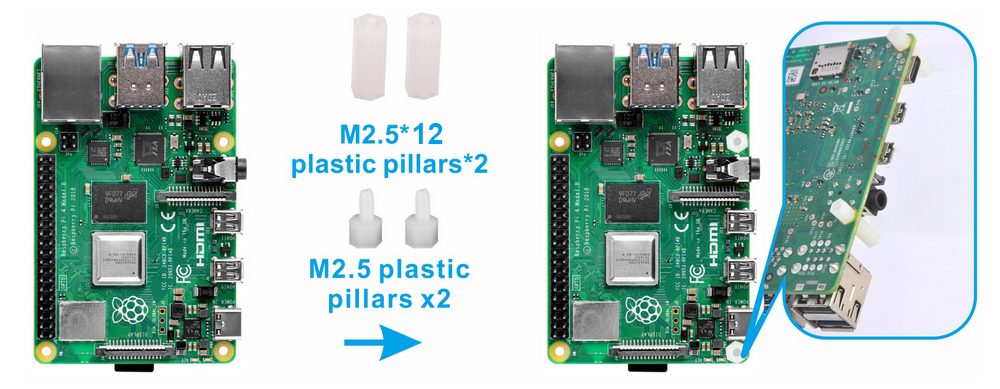
Étape 10. Faites passer une entretoise plastique M2.5 à travers le Raspberry Pi, puis une entretoise plastique M2.5*12 de bas en haut, comme suit :
Étape 11. Fixez 2 vis plastique M2.5 sous le châssis et 2 vis plastique M2.5 sur le Raspberry Pi, comme suit :
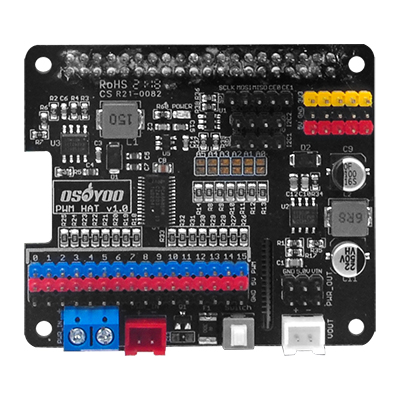
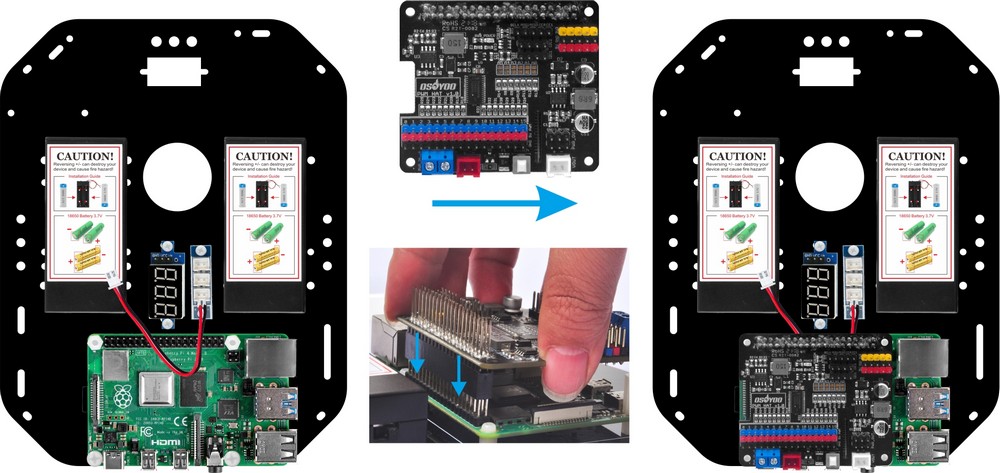
Étape 12. Insérez le OSOYOO PWM Hat sur le Raspberry Pi, comme suit :
Connexions
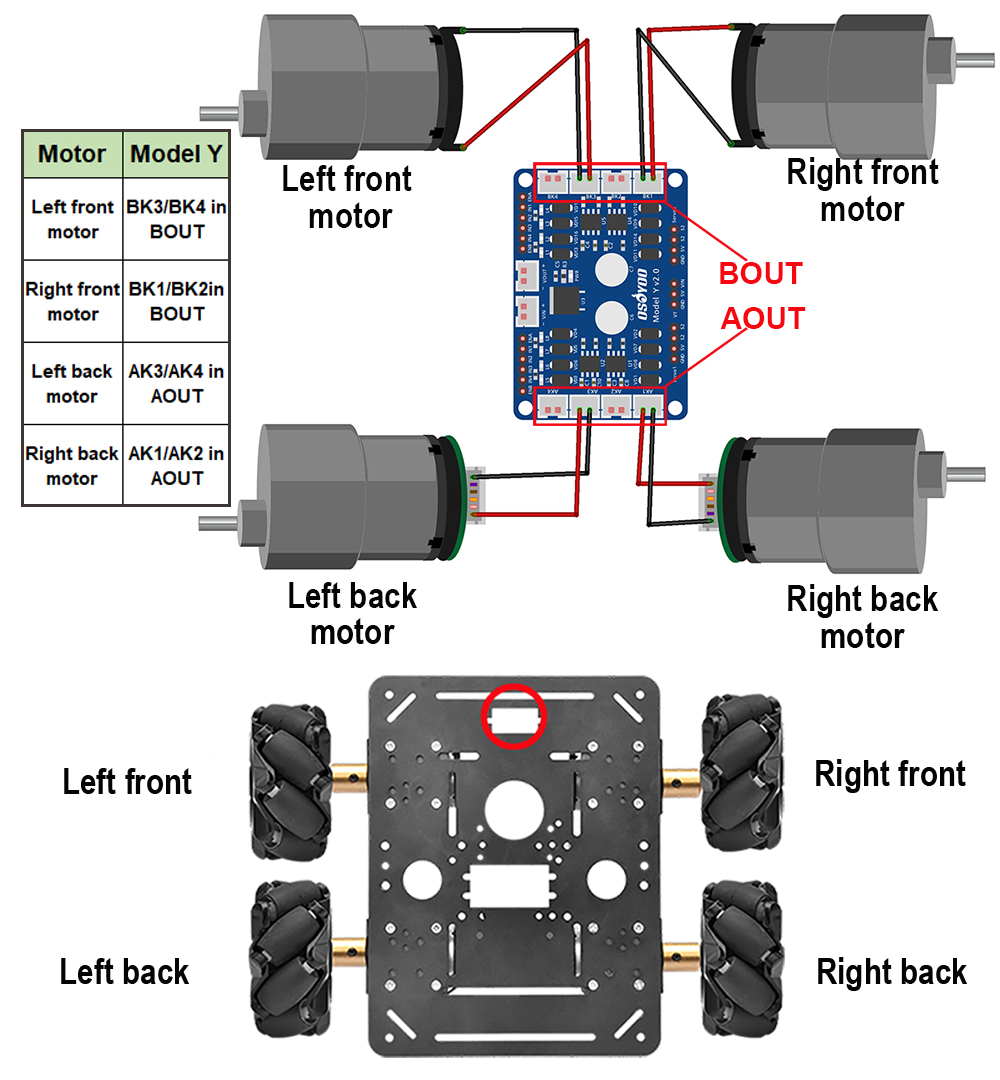
1. Connectez les 4 moteurs à la carte driver Model Y comme illustré ci-dessous.
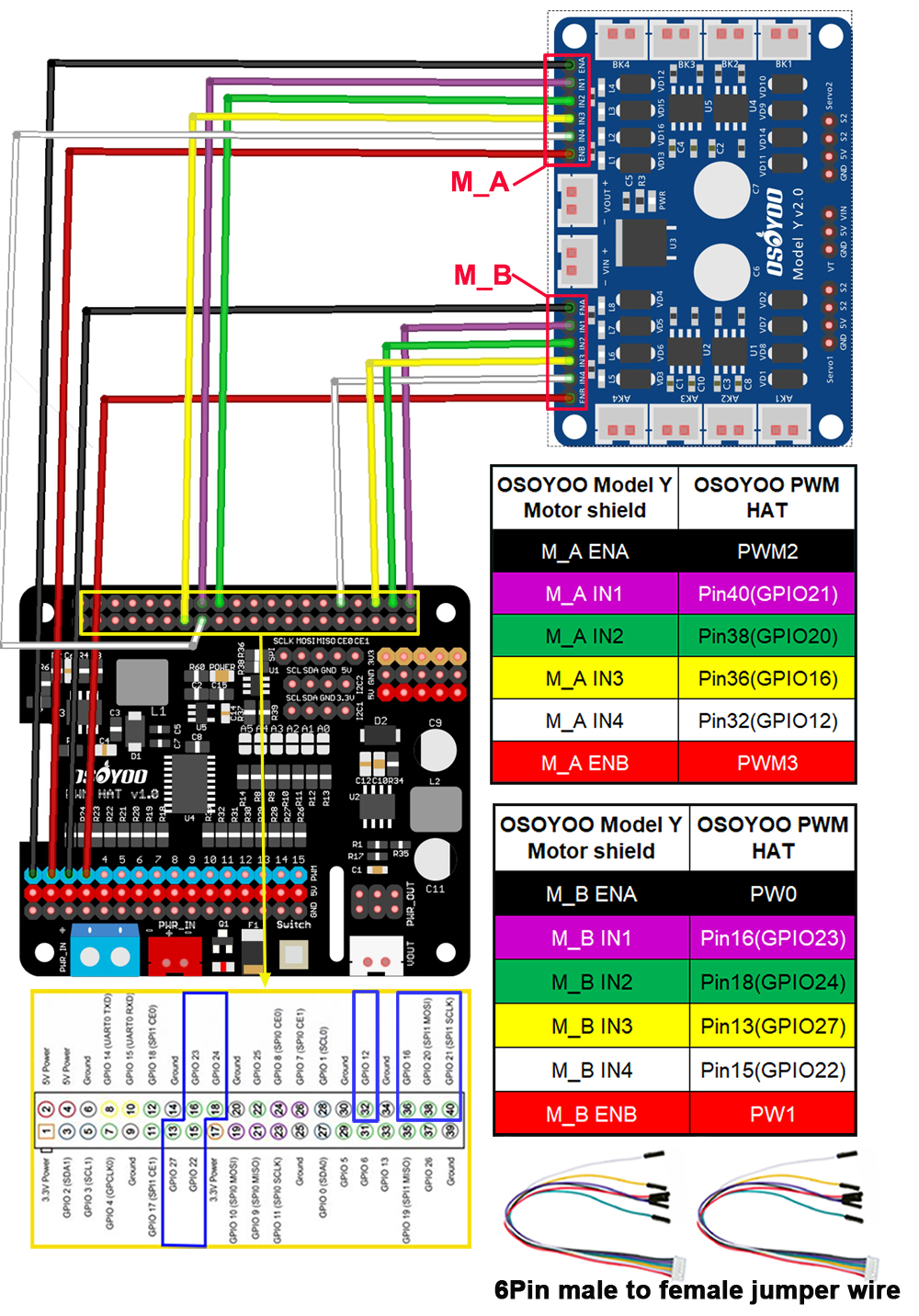
2. Connectez M_A ENA, ENB du Model Y aux broches PWM2, PWM3 du OSOYOO PWM hat, et M_A IN1, IN2, IN3, IN4 aux broches Pin40(GPIO21), Pin38(GPIO20), Pin36(GPIO16), Pin 32(GPIO12).
Connectez M_B ENA, ENB du Model Y aux broches PWM0, PWM1 du OSOYOO PWM hat, et M_B IN1, IN2, IN3, IN4 aux broches Pin16(GPIO23), Pin18(GPIO24), Pin13(GPIO27), Pin 15(GPIO22).
Attention :
Lorsque vous insérez ou retirez le connecteur à câble parallèle 6 broches de la prise mâle 6 broches du Model Y, tenez toujours le porte-broches en plastique blanc. Ne tirez jamais sur les câbles pour débrancher le connecteur, au risque d’endommager les fils.
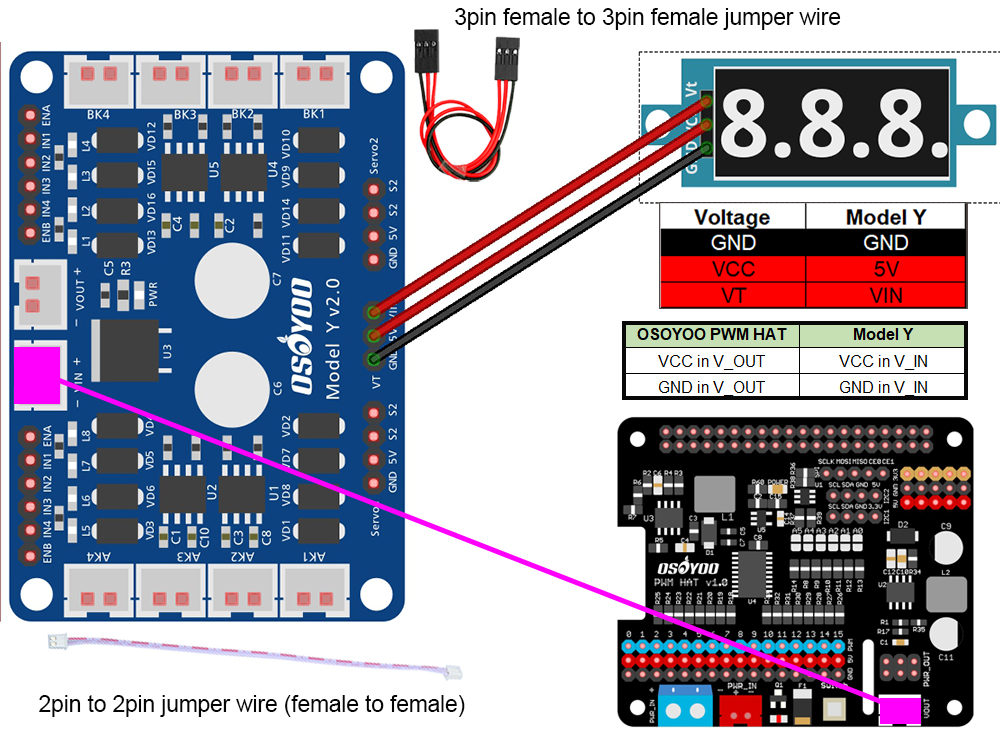
3. Connectez le voltmètre à la carte driver moteur Model Y à l’aide du câble de jonction 3 broches femelle vers 3 broches femelle ; connectez la prise V_OUT du OSOYOO PWM hat à la prise VIN de la carte driver moteur Model Y avec un câble de jonction 2 broches femelle vers femelle :
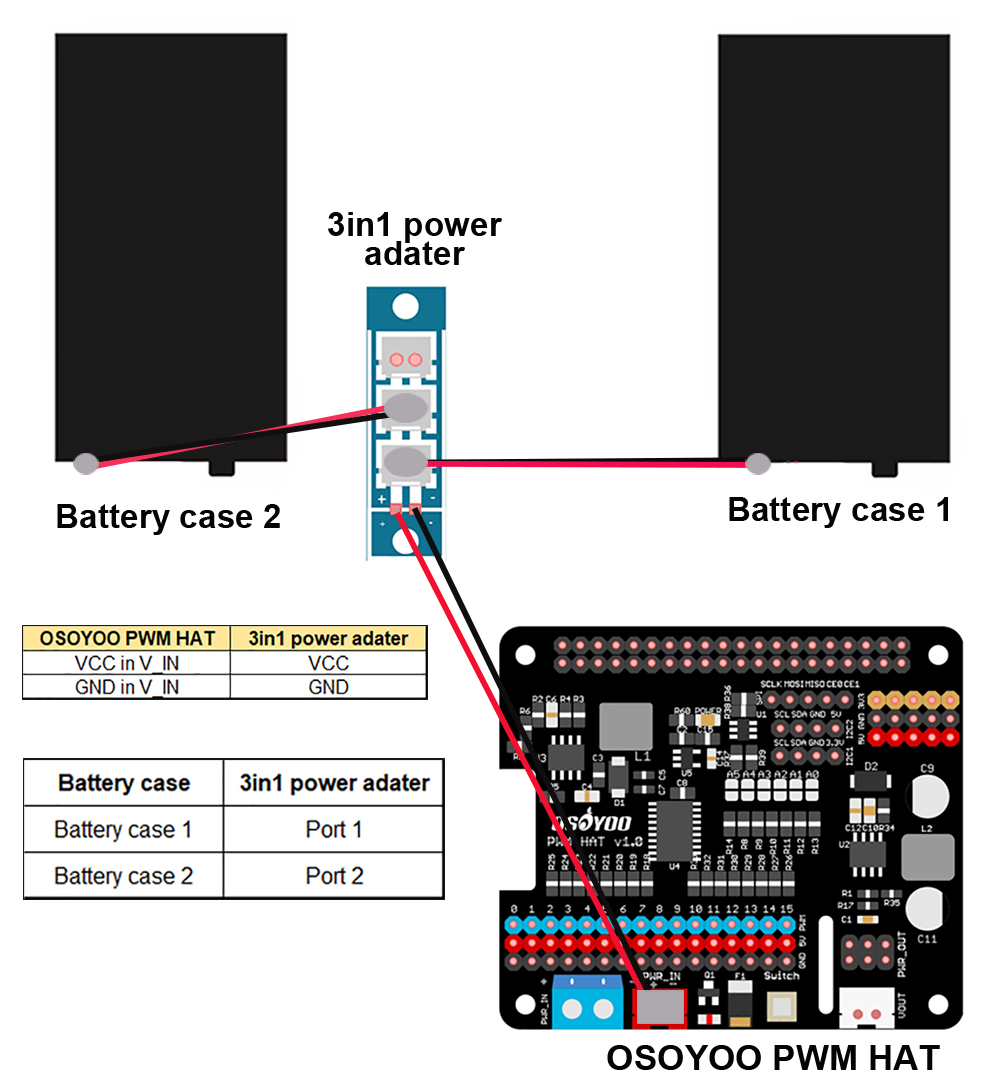
4. Insérez les connecteurs 2 broches des boîtiers de batteries dans l’adaptateur d’alimentation 3-en-1 ; insérez le connecteur 2 broches de l’adaptateur 3-en-1 dans la prise V_IN du OSOYOO PWM hat, comme suit :
Remarque : l’adaptateur 3-en-1 est conçu pour combiner plusieurs boîtiers de batteries de même tension.
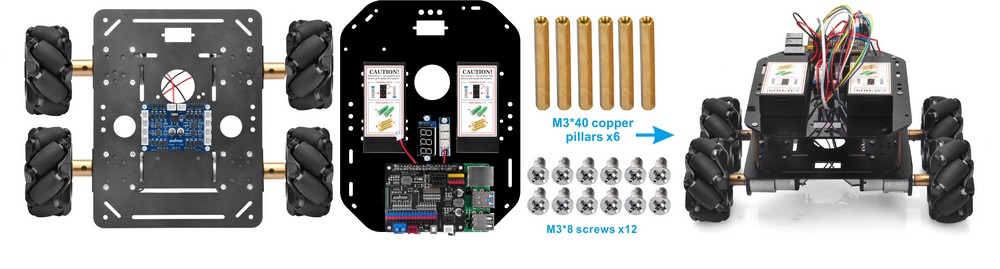
5. Fixez le châssis 2e couche sur le châssis 1ère couche à l’aide des entretoises M3*40. Veillez à respecter l’avant et l’arrière du châssis acrylique et du châssis métallique. La voiture robot est prête à fonctionner une fois cette étape terminée.
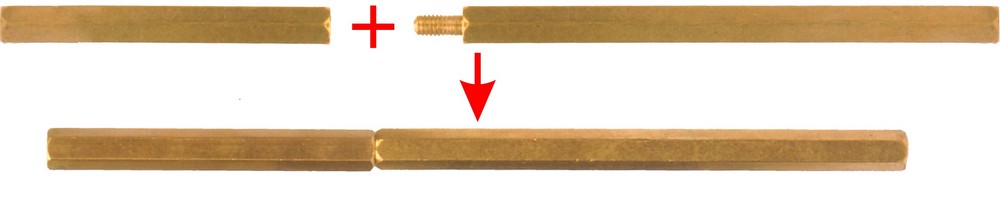
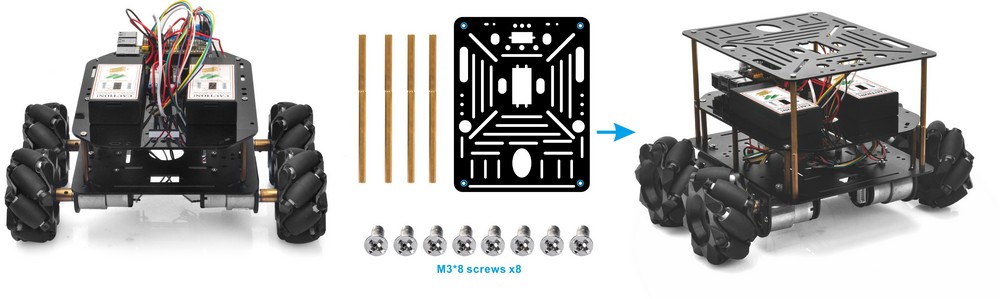
6. Si vous souhaitez ajouter des capteurs supplémentaires, vous pouvez installer le châssis 3e couche sur la voiture robot. Commencez par visser solidement une entretoise cuivre M3*40 avec une entretoise cuivre M3*65+6 pour former une longue entretoise, puis fixez le châssis 3e couche sur le châssis 1ère couche à l’aide de ces longues entretoises.
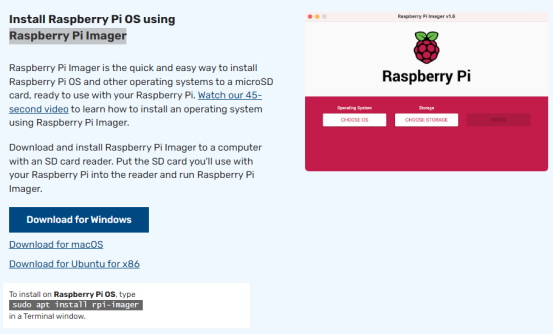
Installation de l’OS avec Raspberry Pi Imager
Remarque : nous utilisons ici Raspberry Pi Imager v1.7.2 comme exemple pour l’installation de l’OS ; d’autres versions peuvent présenter quelques différences.
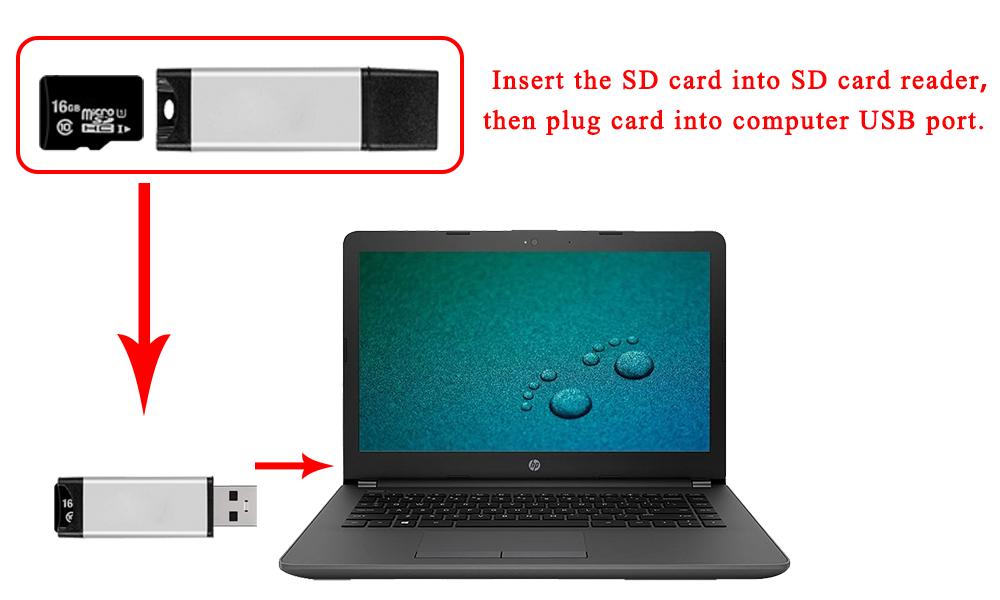
Étape 1 : Préparez une carte micro SD (carte TF) nouvellement formatée avec un lecteur de carte micro SD USB. Les tailles recommandées sont 16 Go et 32 Go. (Ignorez cette étape si votre carte SD dispose déjà d’une image OS Raspbian préinstallée).
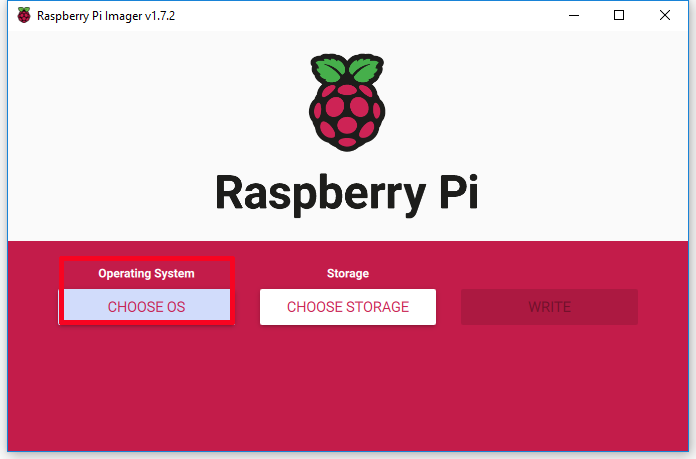
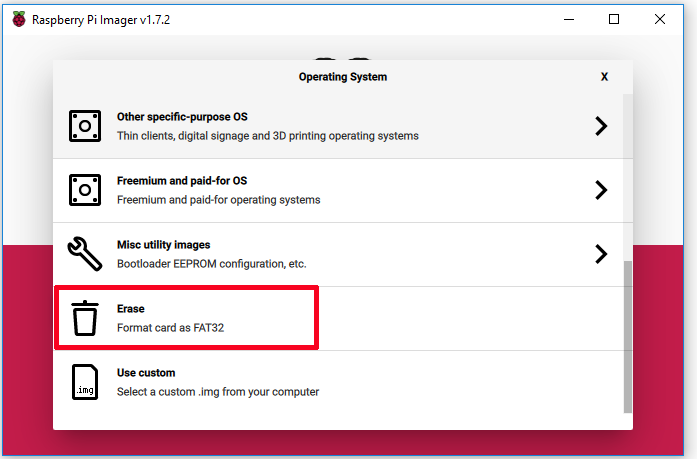
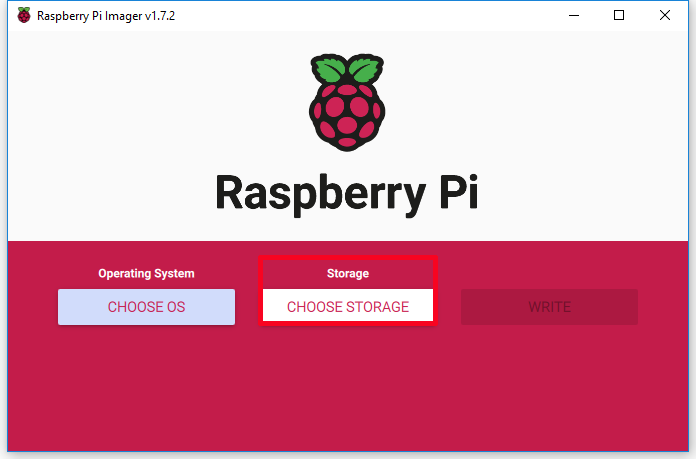
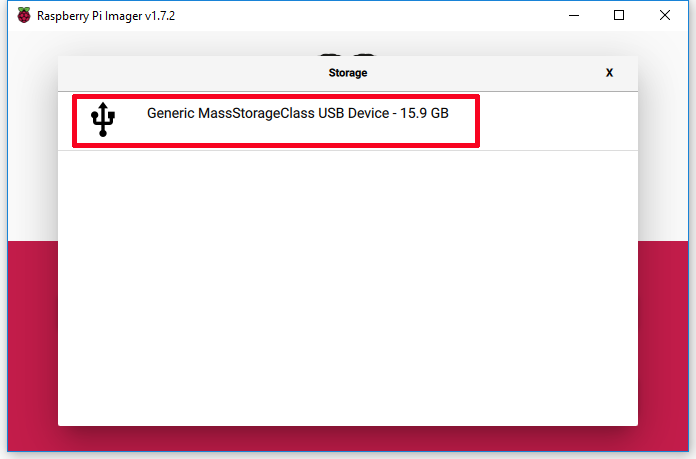
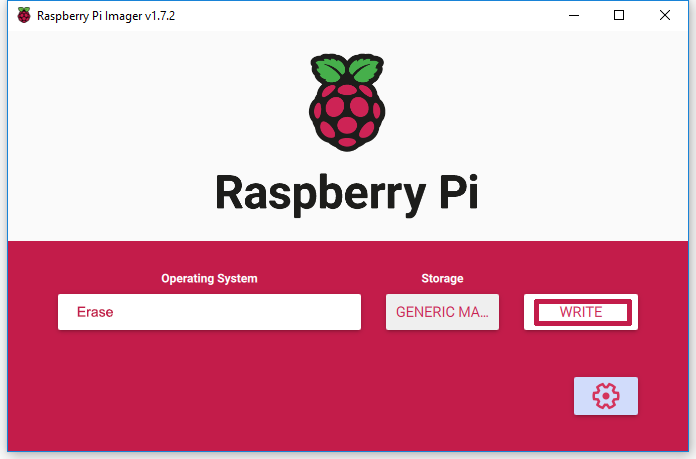
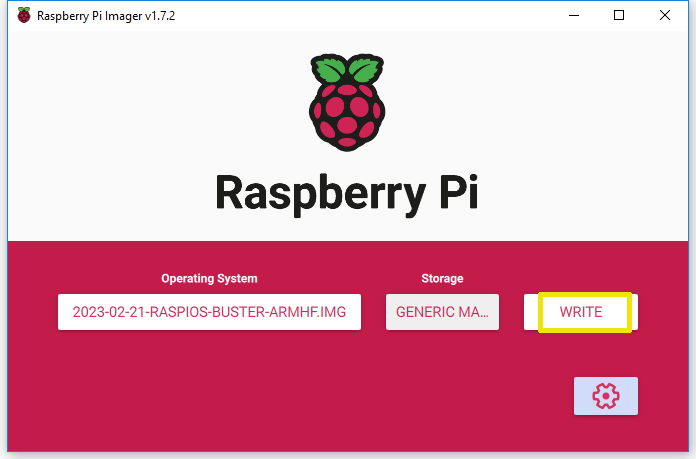
Étape 3) : Si vous ne savez pas comment formater une carte micro SD, lancez Raspberry Pi Imager, sélectionnez « Erase » dans le champ Système d’exploitation et votre carte micro SD dans le champ Stockage, puis cliquez sur « WRITE » pour formater la carte.
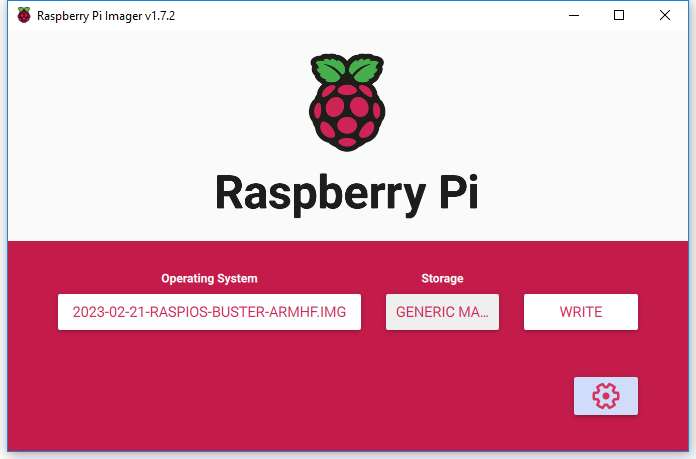
Étape 4) : Lancez Raspberry Pi Imager, sélectionnez « Use custom » dans le champ Système d’exploitation, puis naviguez jusqu’au fichier « Raspberry Pi OS » que vous avez téléchargé, et sélectionnez votre carte SD dans le champ Stockage. (Si vous avez déjà gravé Raspberry Pi OS sur votre carte SD, passez directement de l’étape 3 à l’étape 5.)
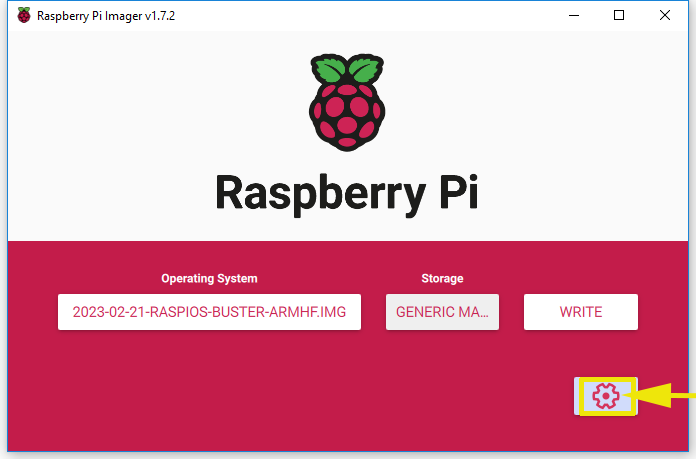
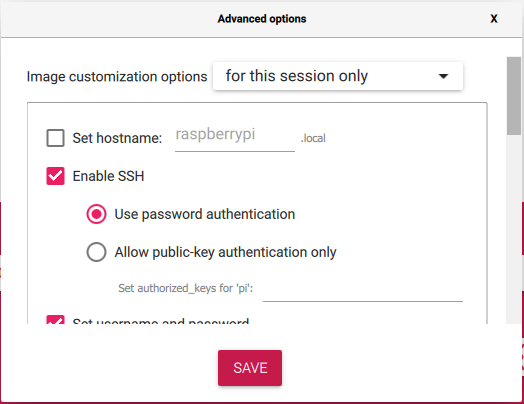
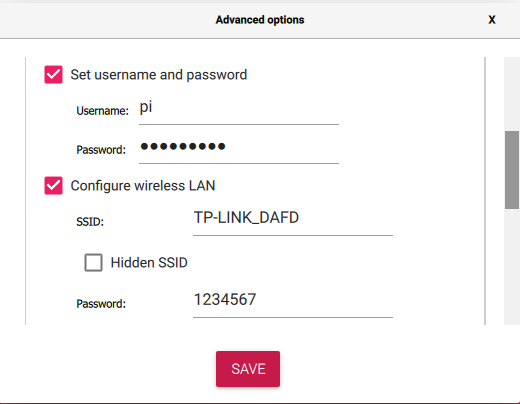
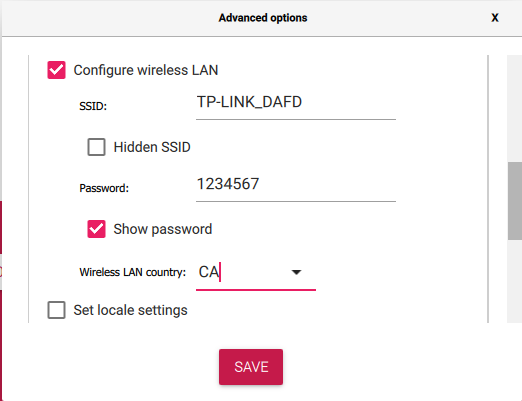
Étape 5) : Cliquez sur l’icône « paramètres » pour activer SSH, définir un nom d’utilisateur et un mot de passe (ici nous utilisons pi comme nom d’utilisateur et raspberry comme mot de passe), et configurer le réseau sans fil. Cliquez ensuite sur « SAVE ».
Étape 6) : Cliquez sur WRITE pour graver le système d’exploitation (Raspberry Pi OS) sur votre carte micro SD.
Contrôler le Raspberry Pi à distance
Étape 1 : Trouver l’adresse IP
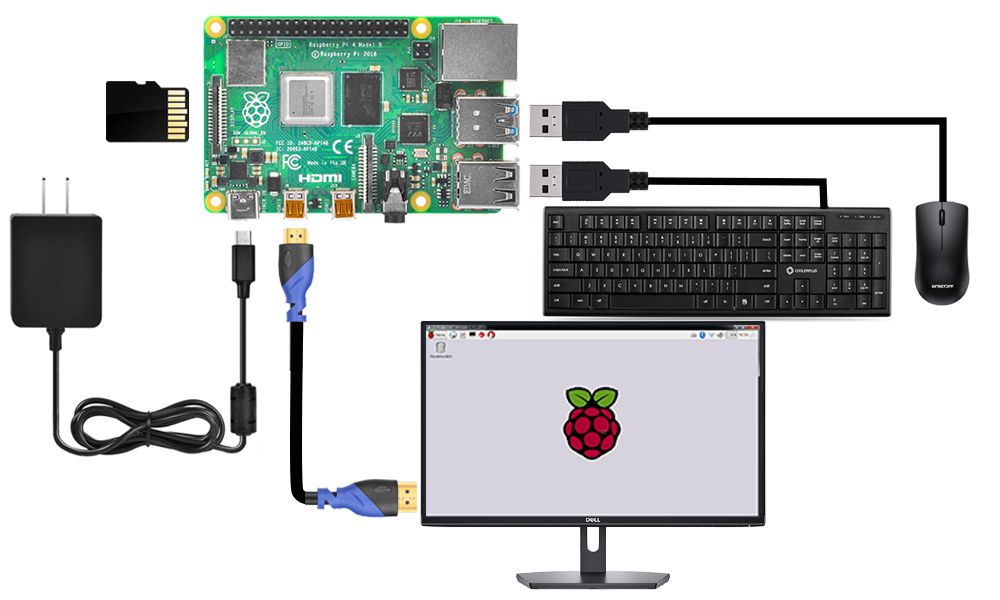
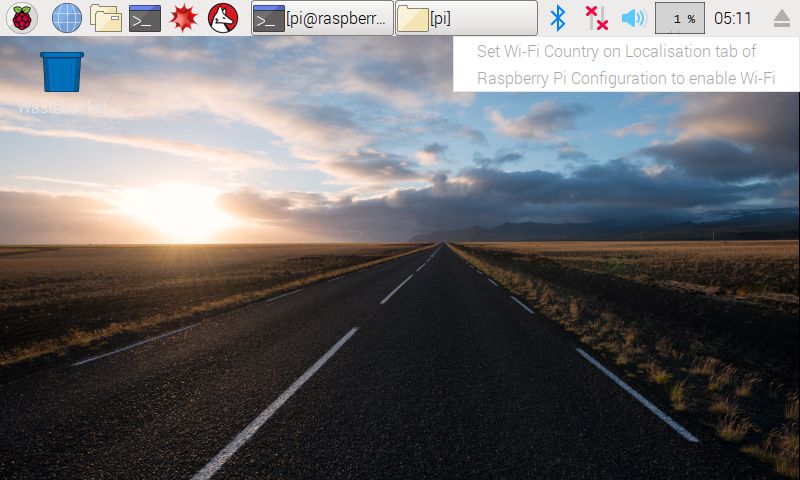
1. Connectez le Raspberry Pi à un moniteur HDMI ou à un téléviseur. Branchez un clavier et une souris sur les ports USB du Raspberry Pi. Insérez la carte SD contenant l’OS dans l’emplacement prévu sur votre Raspberry Pi (si vous avez déjà installé votre voiture robot Raspberry Pi, connectez-la à un écran pour trouver l’adresse IP).
2. Si vous survolez l’icône LAN, vous obtiendrez la notification suivante :
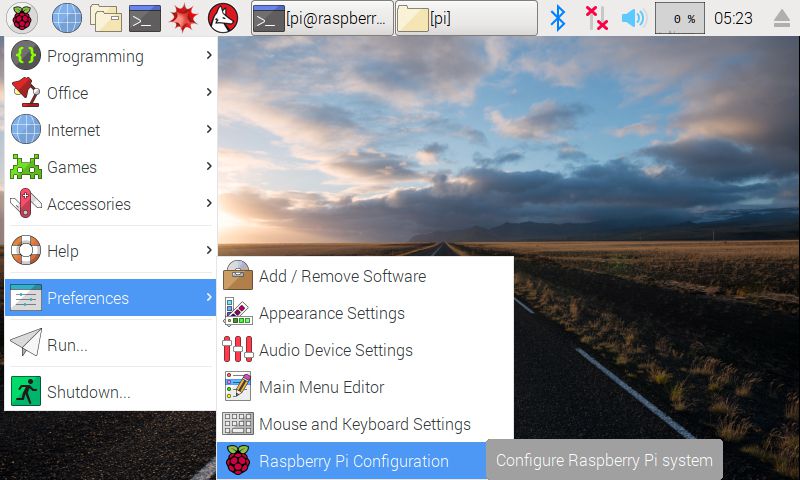
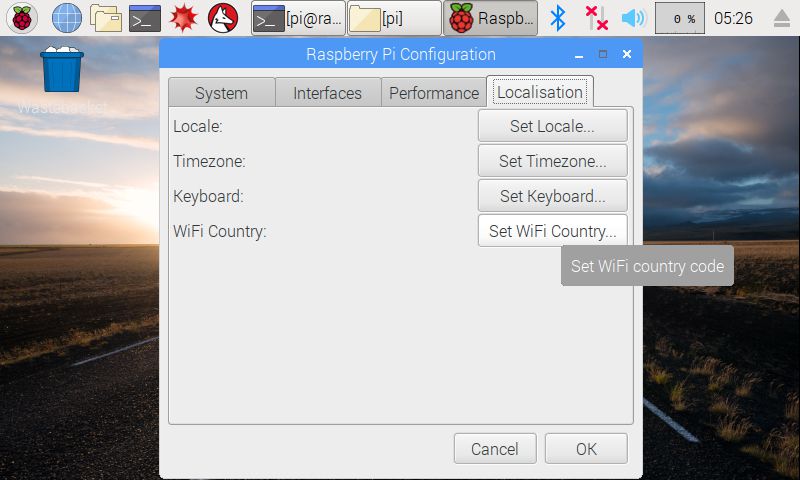
3. Configurez la localisation WIFI comme suit :
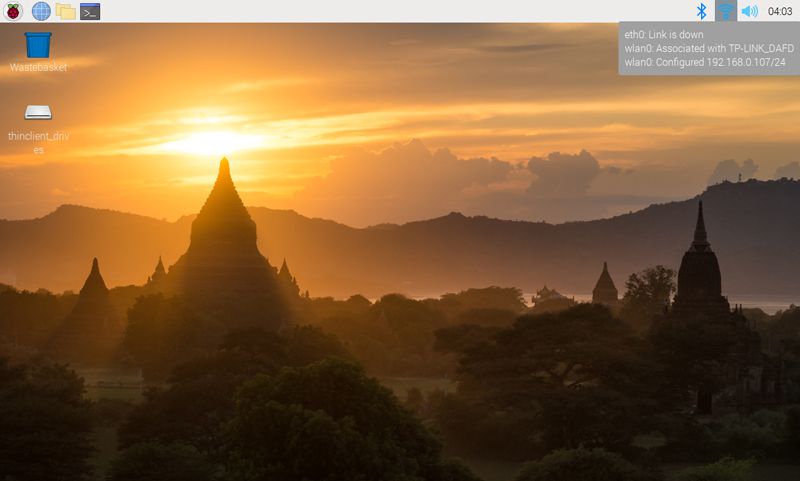
4. Trouvez l’adresse IP du Raspberry Pi. Méthode A : Connectez votre Pi à un moniteur et à une souris, puis cliquez sur l’icône LAN ou WIFI pour obtenir l’adresse IP, comme sur la photo ci-dessous.
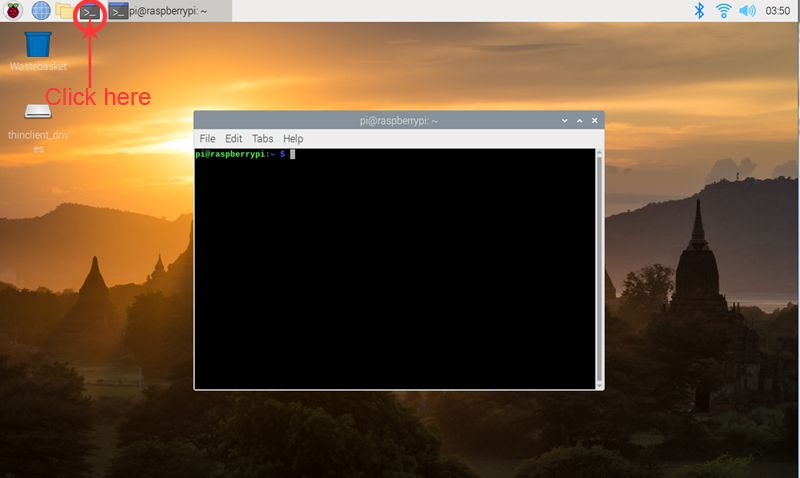
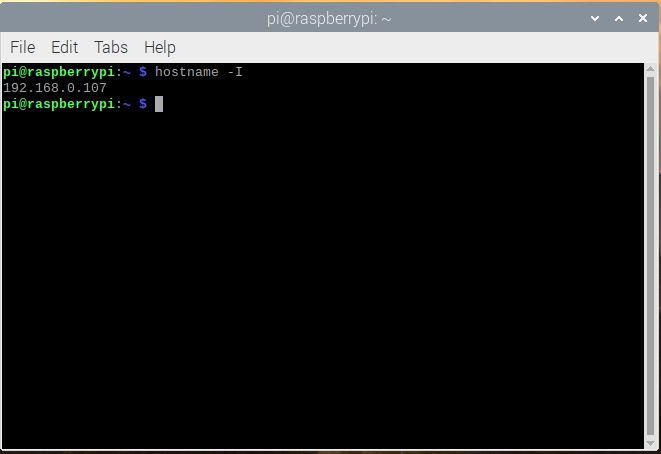
Méthode B : Cliquez sur l’icône Terminal à l’écran, puis saisissez la commande suivante dans la fenêtre du terminal pour obtenir votre adresse IP :
hostname -I
Étape 2 : Contrôler le Raspberry Pi à distance avec SSH
Remarque :
1) Pour en savoir plus sur l’utilisation d’un outil SSH pour contrôler le Raspberry Pi à distance, consultez le lien : https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) Dans nos exemples de leçons, nous utilisons un PC Windows comme console distante et PuTTY comme outil SSH.
1. Insérez la carte SD contenant l’OS dans la carte Raspberry Pi (Attention : éteignez le Raspberry Pi avant d’insérer la carte), puis allumez la voiture robot.
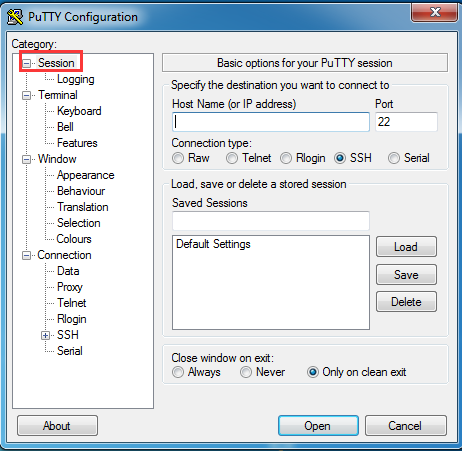
3. Ouvrez PuTTY et cliquez sur Session dans l’arborescence de gauche (généralement réduite au démarrage de PuTTY) :
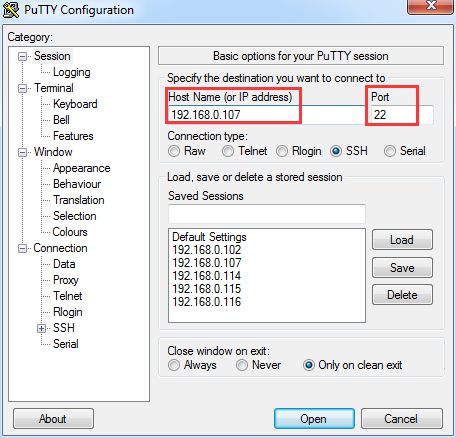
4. Saisissez l’adresse IP obtenue dans le champ « Host Name (or IP address) » et 22 dans le champ « Port » (valeur par défaut), puis cliquez sur « Open ».
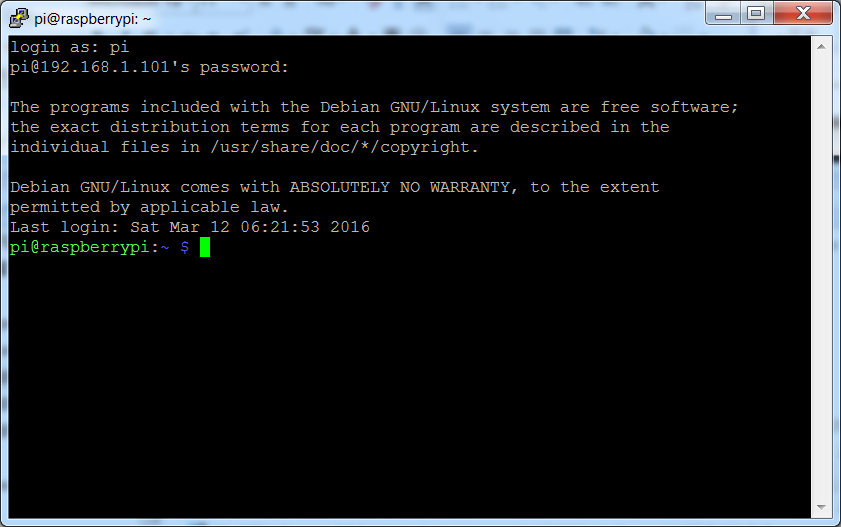
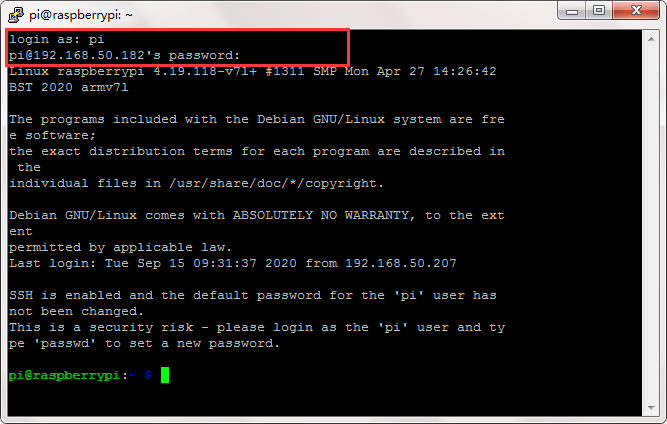
5. Lors de votre première connexion au Raspberry Pi via l’adresse IP, un avertissement de sécurité s’affiche. Cliquez simplement sur Yes. Lorsque la fenêtre PuTTY affiche « login as: », saisissez le nom d’utilisateur : pi, et le mot de passe : raspberry (le mot de passe par défaut, si vous ne l’avez pas modifié). Remarque : lorsque vous tapez le mot de passe, rien ne s’affiche à l’écran, mais la saisie est bien enregistrée. Concentrez-vous pour le taper correctement et appuyez sur Entrée. Une fois connecté au Raspberry Pi, la fenêtre s’affiche comme suit :
Étape 4 : Tapez la commande suivante pour télécharger l’exemple de code.
wget https://osoyoo.com/driver/mecanum/mecanum.py
Étape 5 : Posez la voiture robot par terre et exécutez la commande suivante :
python mecanum.py
Une fois ce programme Python lancé, les moteurs avancent pendant 0,75 seconde, puis reculent pendant 0,75 seconde, tournent à gauche pendant 0,75 seconde, tournent à droite pendant 0,75 seconde, se déplacent latéralement à droite, puis à gauche, effectuent quelques mouvements omnidirectionnels et s’arrêtent.
Dépannage :
Si vous utilisez le système Bookworm, vous pouvez obtenir le message d’erreur suivant lors de l’exécution du programme mecanum.py :
GPIO.setup(IN1, GPIO.OUT)
^^^^^^^^^^^^^^^^^^^^^^^^^
RuntimeError: Cannot determine SOC peripheral base address
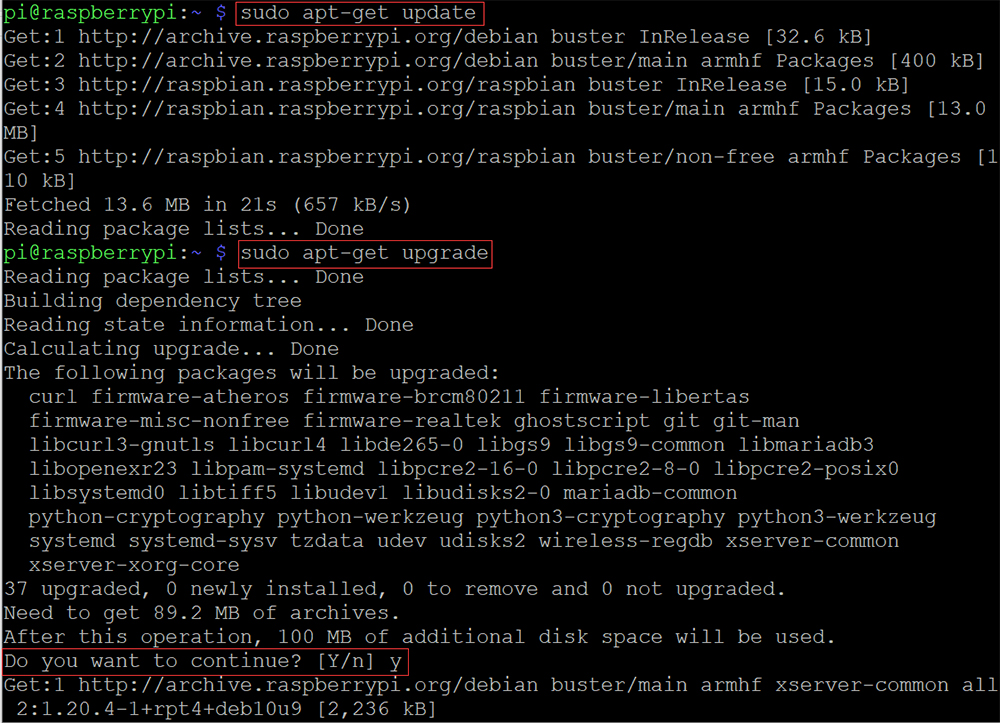
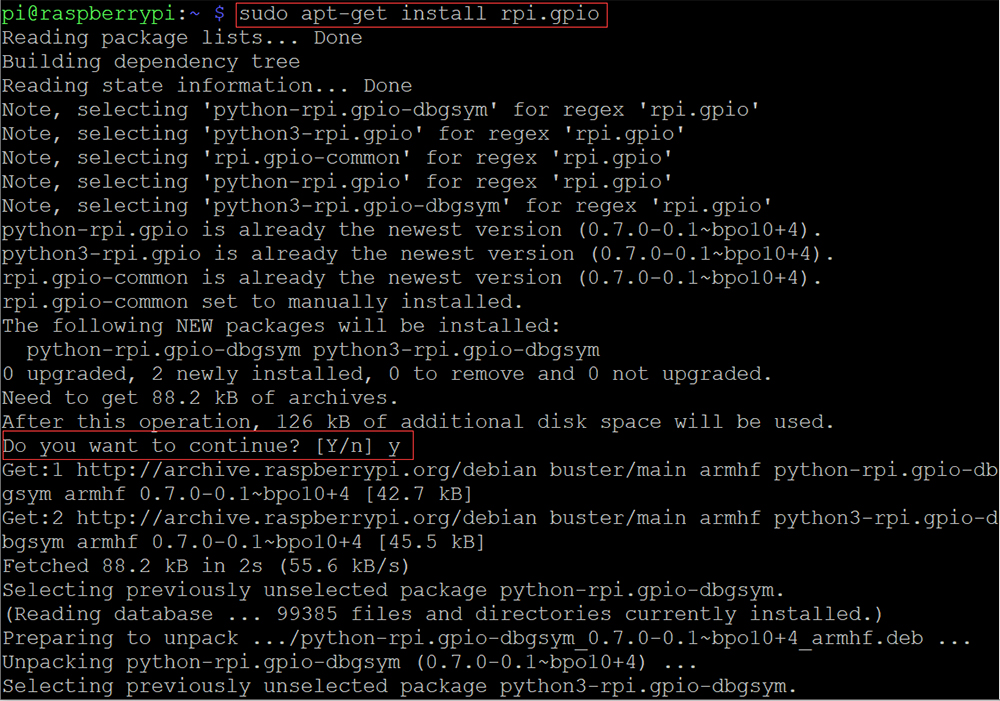
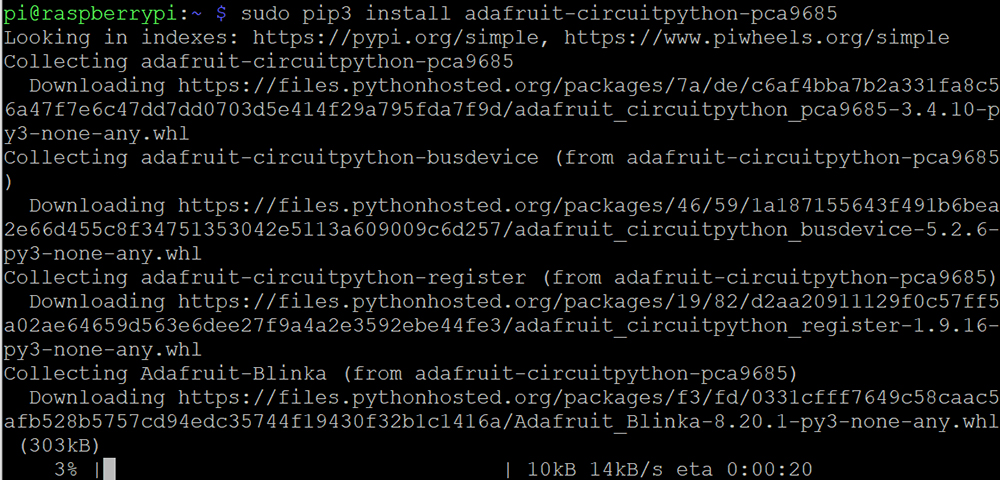
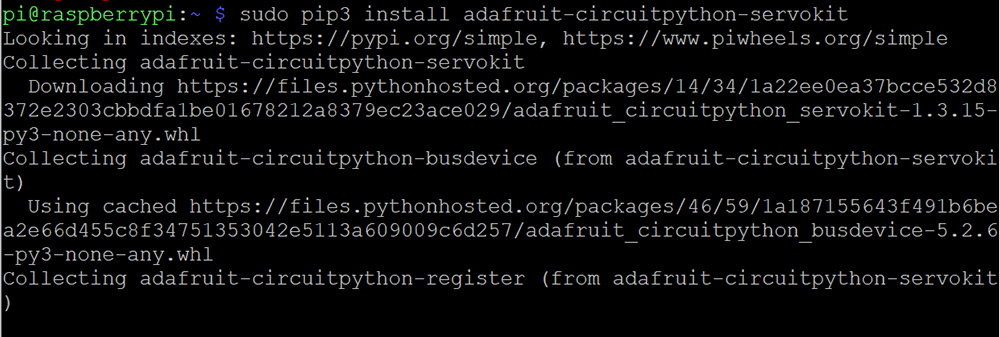
Ce message indique que votre bibliothèque rpi.gpio n’est pas compatible avec le système Bookworm. Vous devez réinstaller la bibliothèque rpi.gpio pour Pi 5 avec les commandes suivantes :









































{kind=link}
{kind=link}