El kit robot OSOYOO FlexiRover para Arduino es un chasis robot personalizable y versátil, diseñado para usuarios mayores de 15 años, especialmente para quienes tienen experiencia en robótica con Arduino. El kit no incluye una placa Arduino, pero es compatible con distintos modelos Arduino, lo que permite a cada usuario elegir el controlador que mejor se adapte a sus necesidades.
El kit incluye cuatro motores TT con cables preconectados para una instalación sencilla, junto con cuatro ruedas resistentes que garantizan un movimiento suave y fiable sobre diferentes superficies. Los motores se conectan a un cómodo módulo controlador de motores plug-and-play, lo que simplifica la configuración y permite a los usuarios centrarse en la programación en lugar del cableado complejo.
El kit también incluye un soporte de baterías con interruptor on/off integrado, diseñado para baterías 18650 (no incluidas), para una gestión eficiente y fiable de la alimentación durante un uso prolongado.
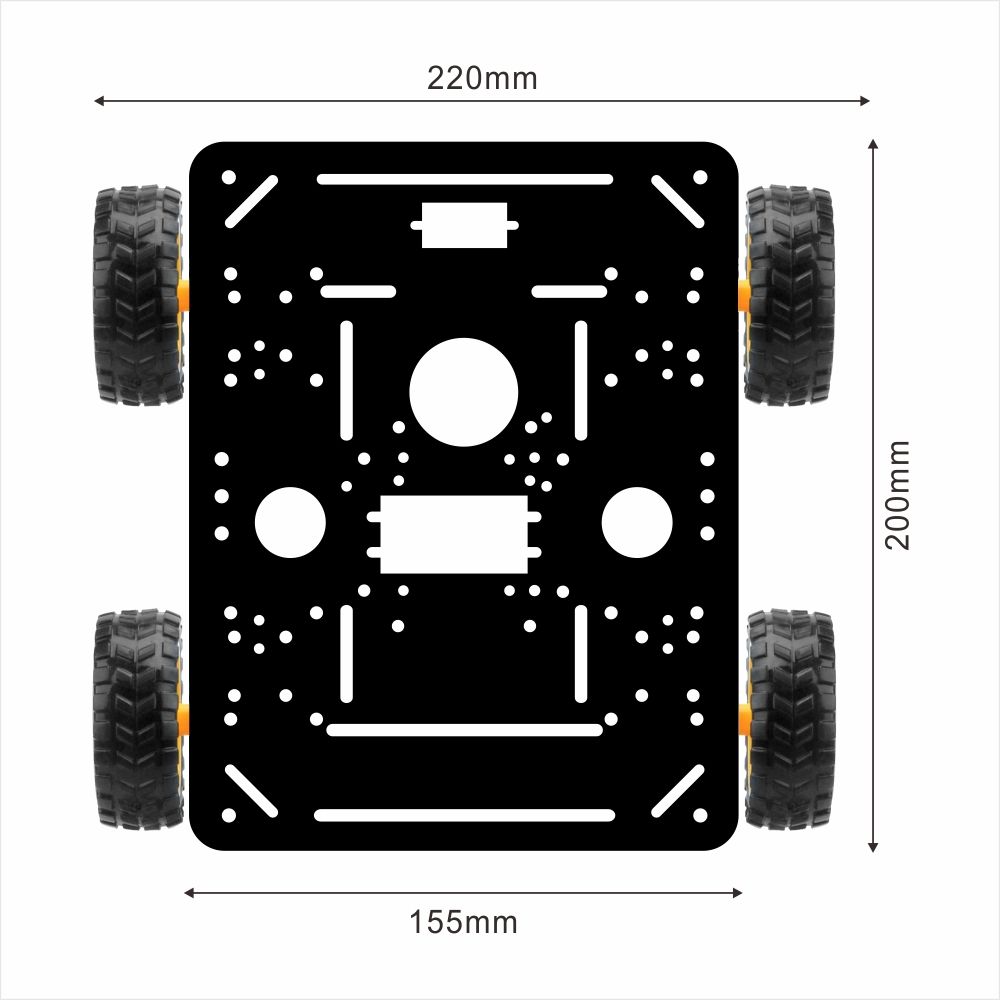
Lo que distingue al FlexiRover es su chasis personalizable. Gracias a múltiples orificios preperforados, los usuarios pueden fijar fácilmente sensores, cámaras, brazos mecánicos y otros accesorios, ofreciendo flexibilidad para una amplia variedad de aplicaciones robóticas. El kit es, por tanto, ideal para la experimentación, proyectos educativos o la construcción de sistemas robóticos más avanzados.
Con este kit, los usuarios pueden desarrollar sus habilidades en robótica creando robots únicos y personalizados adaptados a sus necesidades y proyectos específicos.
Puntos clave
Sin placa Arduino incluida – Compatible con varias placas Arduino, para elegir libremente el controlador preferido.
4 motores TT y ruedas incluidos – Motores precableados para un movimiento fluido y una integración sencilla.
Controlador de motores plug-and-play – Simplifica el control de los motores y reduce la complejidad del cableado.
Soporte de baterías con interruptor – Garantiza una gestión eficiente de la alimentación para un funcionamiento fiable a largo plazo.
Chasis personalizable – Los orificios preperforados permiten fijar fácilmente sensores y accesorios, haciendo el kit versátil para distintos proyectos de robótica.
Soporte metálico 37 mm — compatible con motores de altísimo par JGB37-550/545/520
Soporte metálico 25 mm — compatible con motores de alto par JGB25-370/310
Soporte metálico TT — motores TT
Círculo rojo
Para módulo controlador OSOYOO Model Y / OSOYOO Model X / L298N
Círculo verde
Para servomotores SG90 / MG995 / MG996
Círculo amarillo
Para portapilas 18650 / portapilas 9 V…
Círculo rosa-violeta
Para sensor de seguimiento de línea / sensor de seguimiento de 5 canales OSOYOO / sensor IR de obstáculos / receptor IR / emisor IR…
Círculo violeta
Para Arduino UNO R3 / Arduino UNO R4 / Arduino UNO WiFi…
Para Arduino Mega 2560 / Arduino DUE
Círculo azul oscuro
Para Raspberry Pi 5 / 4 / 3B / 3A+ / 3B+ / 2B
Contenido del paquete
Instalación de hardware
Instalación de componentes
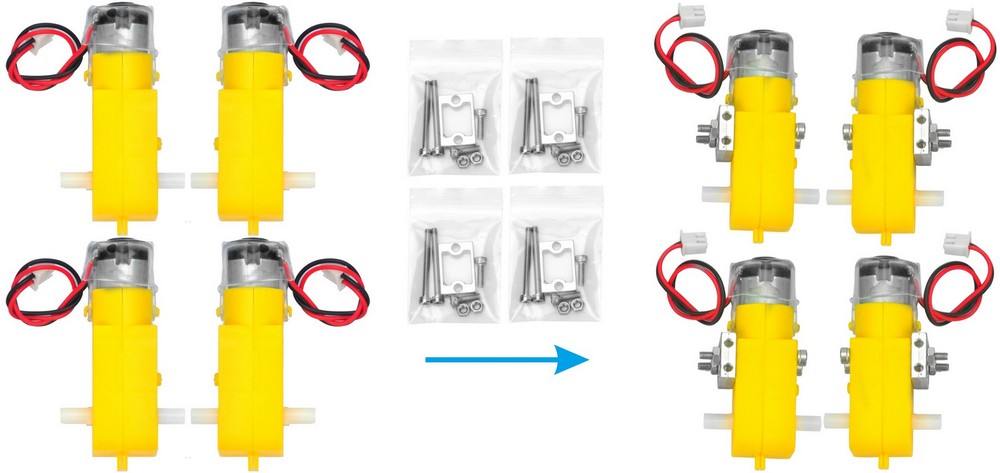
1) Pre-instalar 4 motores TT con los soportes metálicos tal como se muestra a continuación.
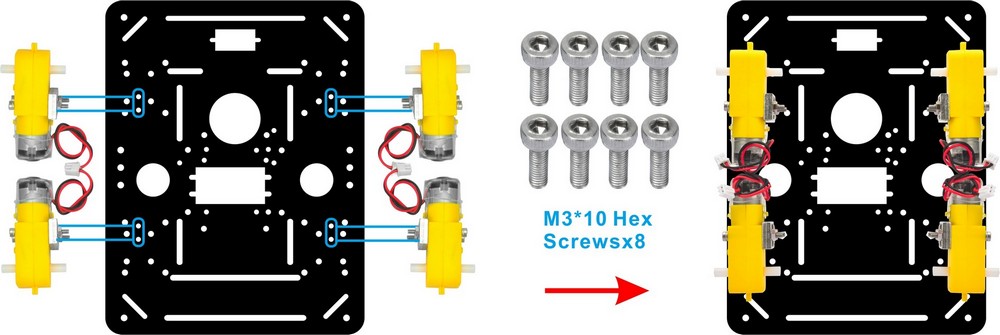
2) Montar los 4 motores en el chasis de 1.ª capa (metal) con tornillos hexagonales M3×10. (Los tornillos están incluidos en el paquete de soportes metálicos de motores.)
3) Instalar las 4 ruedas en los motores y fijarlas con los tornillos correspondientes.
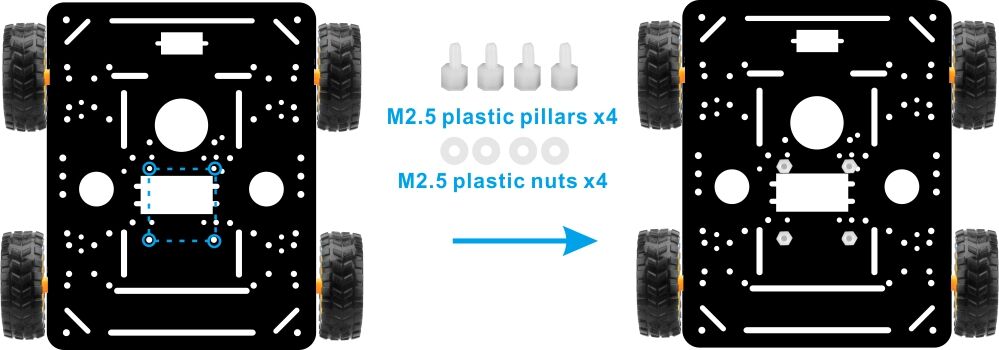
4) Dar la vuelta al chasis y montar el módulo controlador OSOYOO Model X en la parte inferior del chasis de 1.ª capa (metal) con 4× tornillos plásticos M2,5, columnas y tuercas.
5) En este proyecto de ejemplo se utiliza una placa UNO. Montar la placa base OSOYOO para UNO en el chasis superior con 4× tornillos plásticos M2,5, columnas y tuercas. (Asegúrate de instalar la placa en el lado correcto.)
6) Instalar el portapilas 18650 en el chasis superior con 4× tornillos M3×10 y tuercas M3.
Conexiones
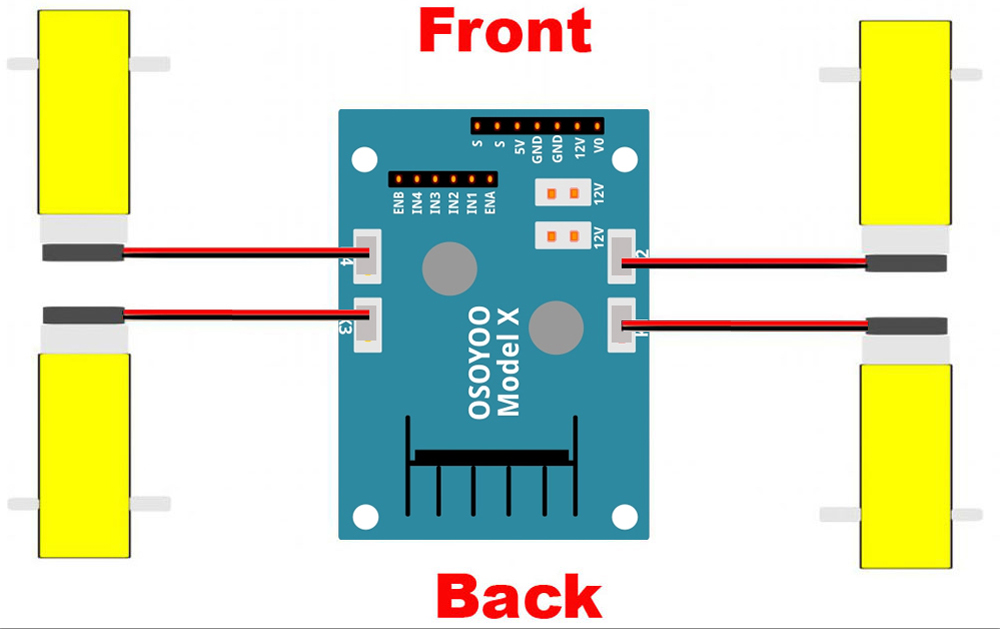
1) Conectar los 4 motores a las tomas K1–K4 del módulo OSOYOO Model X siguiendo el siguiente diagrama:
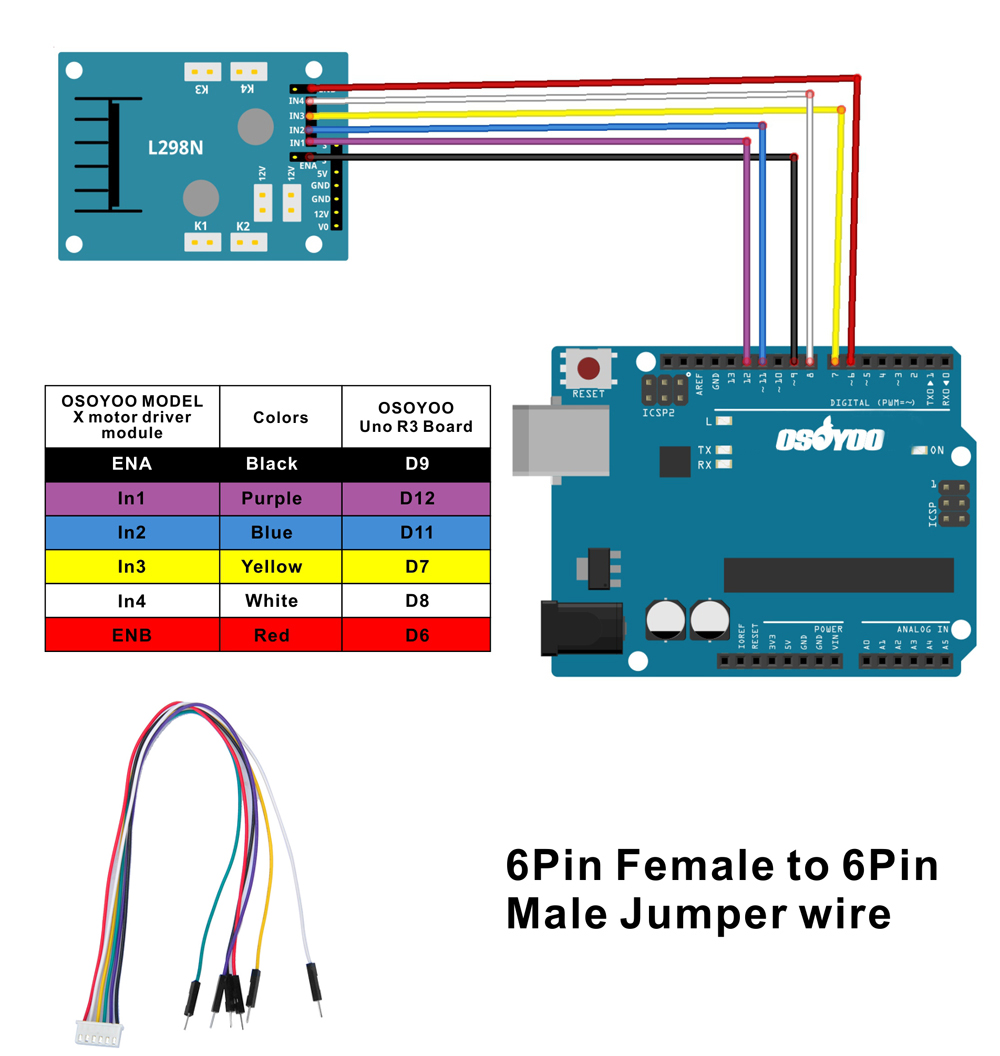
2) Conectar los 6 pines de control del módulo OSOYOO Model X a la placa base OSOYOO: ENA→D9, IN1→D12, IN2→D11, IN3→D7, IN4→D8, ENB→D6, utilizando el cable jumper hembra-macho de 6 pines como se muestra.
Precaución: Al insertar o extraer el conector de 6 pines en la toma del Model X, sujeta siempre el soporte de plástico negro. Nunca tires directamente de los cables — podría dañarlos.
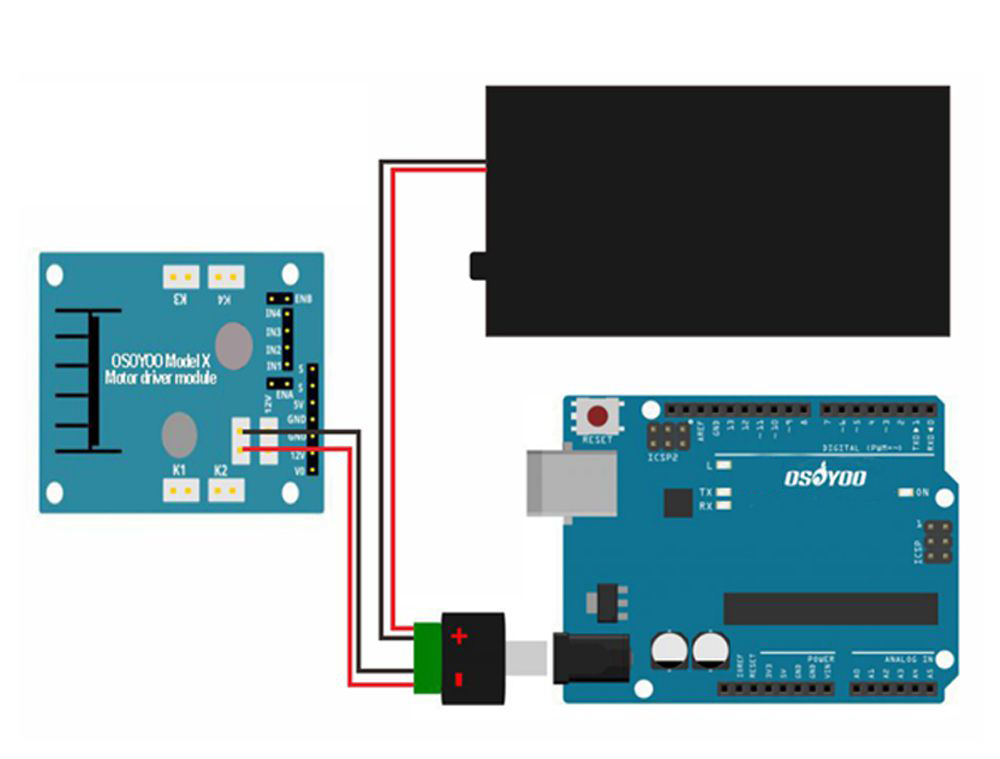
3) Conectar la placa, el portapilas y el módulo OSOYOO Model X siguiendo el diagrama de conexión indicado a continuación.
4) Unir el chasis superior e inferior con cinco columnas de cobre. Fijar las columnas con 10× tornillos M3×10 y 10× arandelas de goma M3, y luego instalar las 4 ruedas en los motores.
La instalación del hardware está casi completa. Antes de insertar las baterías 18650, es necesario cargar primero el código de ejemplo en la placa.
Paso 3: Conectar la placa base OSOYOO al PC con un cable USB. Abrir el Arduino IDE → hacer clic en Archivo → hacer clic en Abrir → seleccionar el archivo v2smartcar-lesson1.ino dentro de la carpeta v2smartcar-lesson1, y luego cargar el código en la placa. (Nota: Apaga la batería o desconecta el adaptador de alimentación antes de cargar el sketch.)
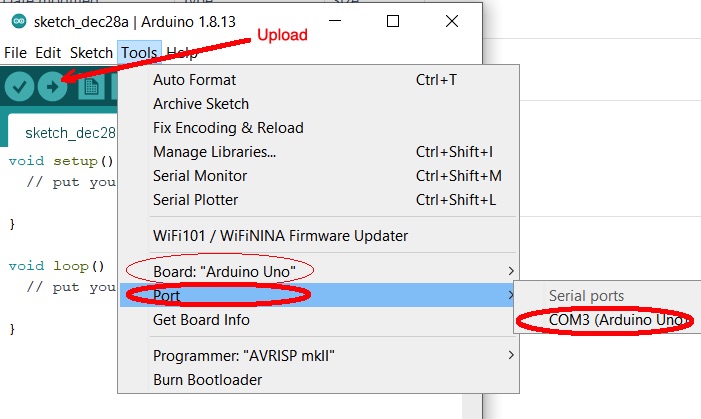
Paso 4: Seleccionar la placa y el puerto correspondientes al proyecto y luego cargar el sketch.
Paso 5: Desconectar el robot del PC e insertar las baterías 18650 en el portapilas. (Nota: Comprueba la polaridad indicada en el portapilas y asegúrate de insertar las baterías en la dirección correcta — una polaridad incorrecta puede dañar el dispositivo y provocar riesgo de incendio.)
Paso 6: Colocar el robot en el suelo y encender el interruptor del portapilas. El robot debería avanzar durante 2 segundos, luego retroceder durante 2 segundos, girar a la izquierda durante 2 segundos, girar a la derecha durante 2 segundos y finalmente detenerse. (Si el robot no se comporta como se describe, comprueba el cableado y cambia las baterías.)