Le kit robot OSOYOO FlexiRover pour Arduino est un châssis robot personnalisable et polyvalent, conçu pour les utilisateurs de 15 ans et plus, en particulier ceux ayant de l’expérience en robotique Arduino. Bien que le kit n’inclue pas de carte Arduino, il est compatible avec différents modèles Arduino, ce qui permet à chacun de choisir le contrôleur qui lui convient le mieux.
Le kit comprend quatre moteurs TT avec câbles pré-branchés pour une installation facile, ainsi que quatre roues solides garantissant un mouvement fluide et fiable sur différentes surfaces. Les moteurs se connectent à un module de pilotage de moteurs plug-and-play pratique, ce qui simplifie la mise en route et permet aux utilisateurs de se concentrer sur la programmation plutôt que sur un câblage complexe.
Le kit comprend également un boîtier de piles avec interrupteur marche/arrêt intégré, conçu pour des piles 18650 (non fournies), pour une gestion efficace et fiable de l’alimentation lors d’une utilisation prolongée.
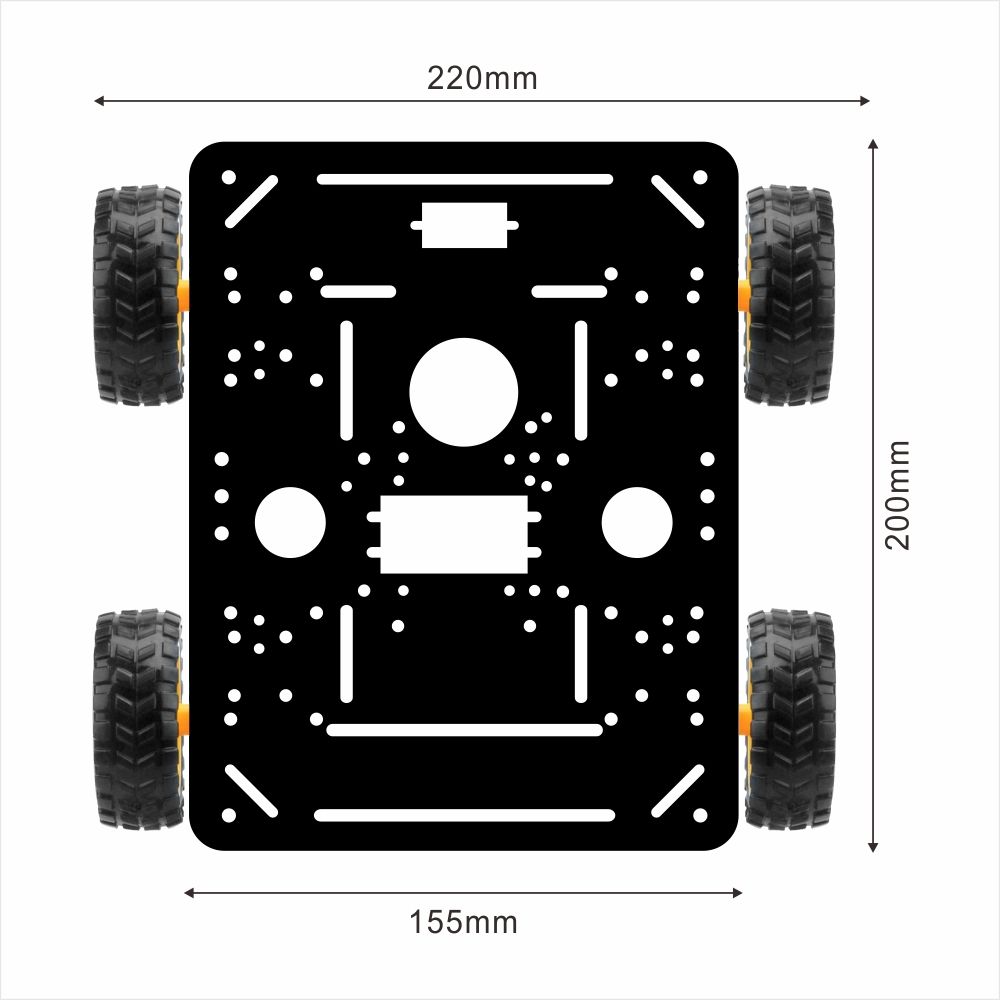
Ce qui distingue le FlexiRover, c’est son châssis personnalisable. Grâce à de nombreux trous pré-percés, les utilisateurs peuvent facilement fixer des capteurs, des caméras, des bras mécaniques et d’autres accessoires, offrant une grande flexibilité pour toutes sortes d’applications robotiques. Le kit est ainsi idéal pour l’expérimentation, les projets éducatifs ou la construction de systèmes robotiques plus avancés.
Avec ce kit, les utilisateurs peuvent développer leurs compétences en robotique en créant des robots uniques et personnalisés adaptés à leurs besoins et à leurs projets.
Points clés
Pas de carte Arduino incluse – Compatible avec différentes cartes Arduino, pour choisir librement son contrôleur préféré.
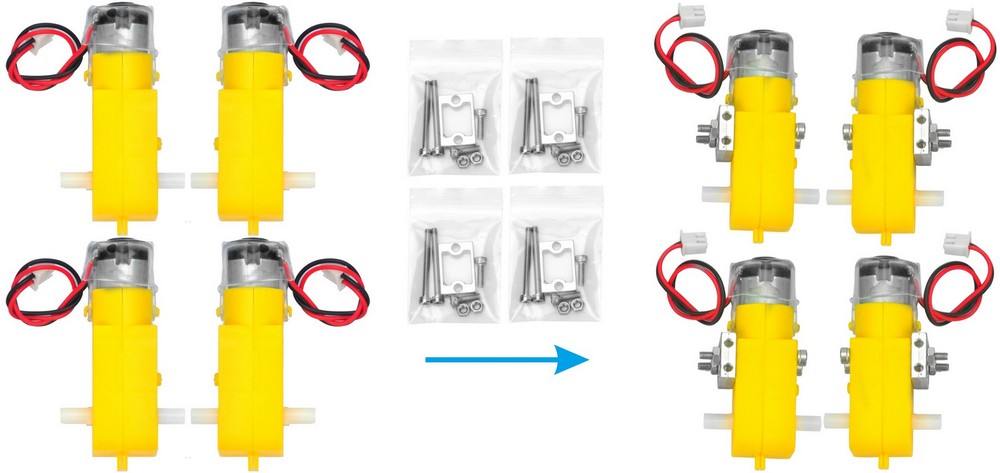
4 moteurs TT et roues inclus – Moteurs pré-câblés pour un mouvement fluide et une intégration facile.
Module de pilotage plug-and-play – Simplifie la commande des moteurs et réduit la complexité du câblage.
Boîtier de piles avec interrupteur – Gestion efficace de l’alimentation pour un fonctionnement fiable sur la durée.
Châssis personnalisable – Les trous pré-percés permettent de fixer facilement des capteurs et des accessoires, rendant le kit polyvalent pour différents projets de robotique.
Support métal 37 mm — compatible avec les moteurs à très haut couple JGB37-550/545/520
Support métal 25 mm — compatible avec les moteurs à haut couple JGB25-370/310
Support métal TT — moteurs TT
Cercle rouge
Pour module de pilotage OSOYOO Model Y / OSOYOO Model X / L298N
Cercle vert
Pour servomoteurs SG90 / MG995 / MG996
Cercle jaune
Pour boîtier de piles 18650 / boîtier 9 V…
Cercle rose-violet
Pour capteur de suivi de ligne / capteur de suivi 5 canaux OSOYOO / capteur IR obstacle / récepteur IR / émetteur IR…
Cercle violet
Pour Arduino UNO R3 / Arduino UNO R4 / Arduino UNO WiFi…
Pour Arduino Mega 2560 / Arduino DUE
Cercle bleu foncé
Pour Raspberry Pi 5 / 4 / 3B / 3A+ / 3B+ / 2B
Contenu du coffret
Installation matérielle
Installation des composants
1) Pré-assemblez 4 moteurs TT avec les supports métalliques comme indiqué ci-dessous.
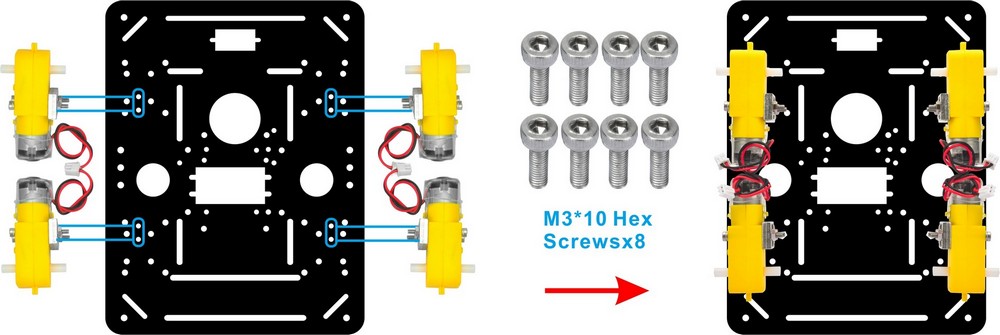
2) Fixez les 4 moteurs sur le châssis 1ère couche (métal) avec des vis hexagonales M3×10. (Les vis sont fournies dans le kit des supports de moteurs métalliques.)
3) Installez les 4 roues sur les moteurs et fixez-les avec les vis prévues à cet effet.
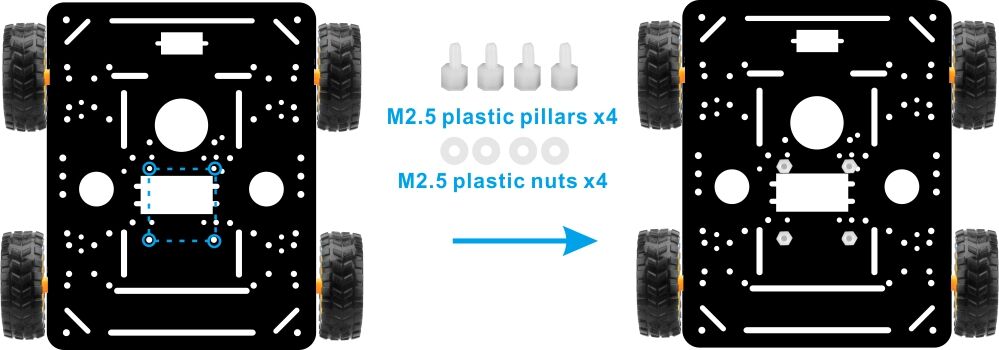
4) Retournez le châssis et montez le module de pilotage OSOYOO Model X sur la face inférieure du châssis 1ère couche (métal) avec 4× vis plastique M2,5, colonnes et écrous.
5) Dans cet exemple, nous utilisons une carte UNO. Montez la carte de base OSOYOO pour UNO sur le châssis supérieur avec 4× vis plastique M2,5, colonnes et écrous. (Assurez-vous d’installer la carte du bon côté.)
6) Installez le boîtier de piles 18650 sur le châssis supérieur avec 4× vis M3×10 et écrous M3.
Connexions
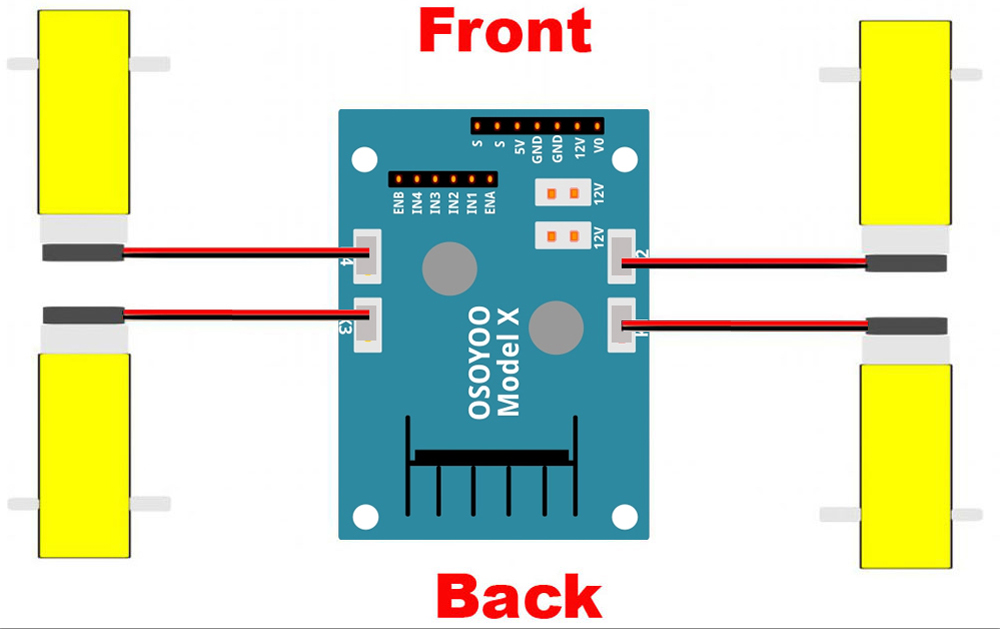
1) Connectez les 4 moteurs aux prises K1 à K4 du module de pilotage OSOYOO Model X en suivant le schéma ci-dessous :
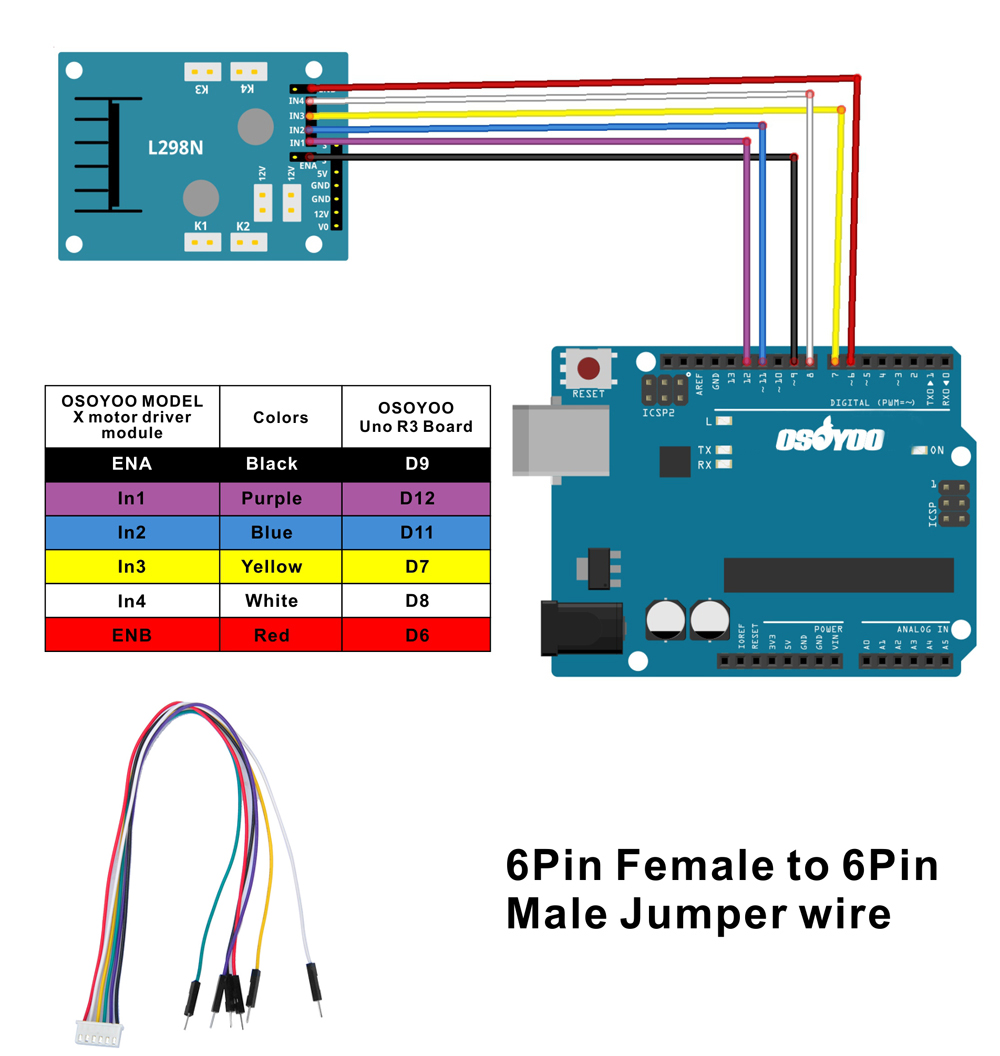
2) Connectez les 6 broches de commande du module OSOYOO Model X à la carte de base OSOYOO : ENA→D9, IN1→D12, IN2→D11, IN3→D7, IN4→D8, ENB→D6, en utilisant le câble dupont femelle vers mâle 6 broches comme indiqué.
Attention : lors de l’insertion ou du retrait du connecteur 6 broches dans la prise du Model X, tenez toujours le boîtier en plastique noir. Ne tirez jamais directement sur les câbles — cela pourrait les endommager.
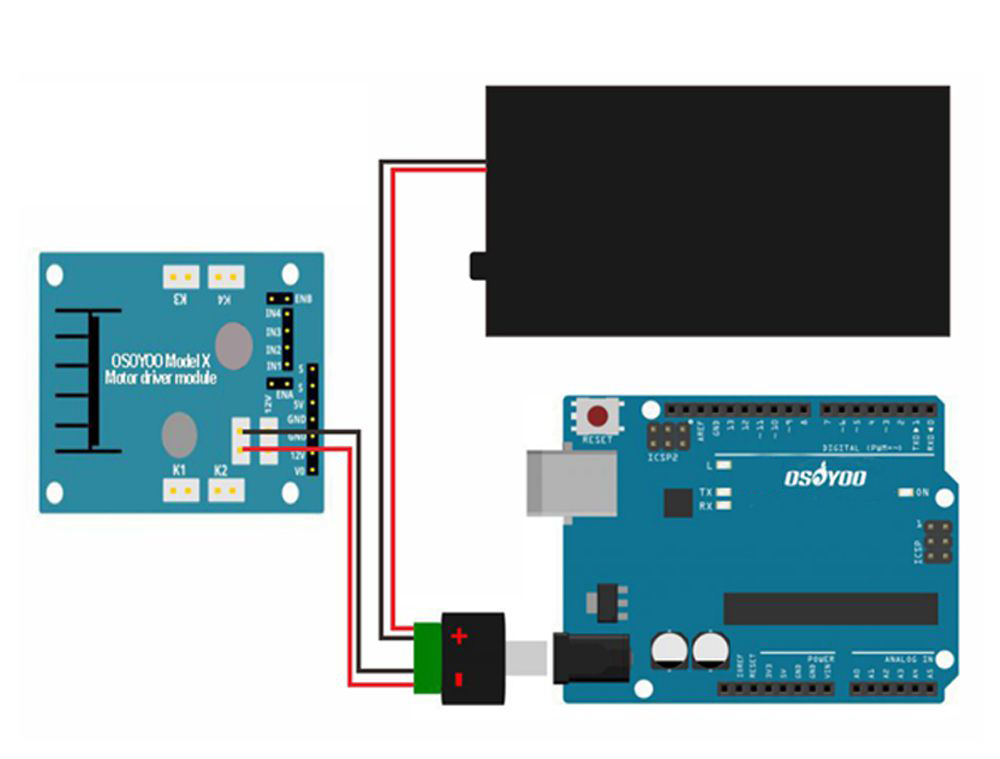
3) Connectez la carte, le boîtier de piles et le module OSOYOO Model X en suivant le schéma de connexion ci-dessous.
4) Assemblez le châssis supérieur et le châssis inférieur à l’aide de cinq colonnes en laiton. Fixez les colonnes avec 10× vis M3×10 et 10× rondelles caoutchouc M3, puis installez les 4 roues sur les moteurs.
L’installation matérielle est maintenant presque terminée. Avant d’insérer les piles 18650, vous devez d’abord téléverser le code exemple sur la carte.
Étape 3 : Connectez la carte de base OSOYOO à votre PC avec un câble USB. Ouvrez l’Arduino IDE → cliquez sur Fichier → cliquez sur Ouvrir → sélectionnez le fichier v2smartcar-lesson1.ino dans le dossier v2smartcar-lesson1, puis téléversez le code sur la carte. (Remarque : Éteignez votre batterie ou débranchez l’adaptateur secteur avant de téléverser le programme.)
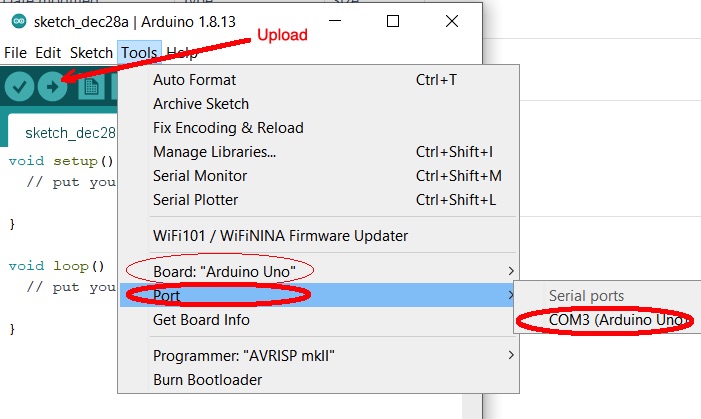
Étape 4 : Sélectionnez la carte et le port correspondant à votre projet, puis téléversez le programme.
Étape 5 : Débranchez le robot du PC et insérez les piles 18650 dans le boîtier. (Remarque : Vérifiez la polarité indiquée sur le boîtier et assurez-vous que les piles sont insérées dans le bon sens — une polarité incorrecte peut endommager votre appareil et provoquer un risque d’incendie.)
Étape 6 : Posez le robot sur le sol et allumez l’interrupteur du boîtier de piles. Le robot devrait avancer pendant 2 secondes, puis reculer pendant 2 secondes, tourner à gauche pendant 2 secondes, tourner à droite pendant 2 secondes, puis s’arrêter. (Si le robot ne se comporte pas comme décrit, vérifiez le câblage et remplacez les piles.)