| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

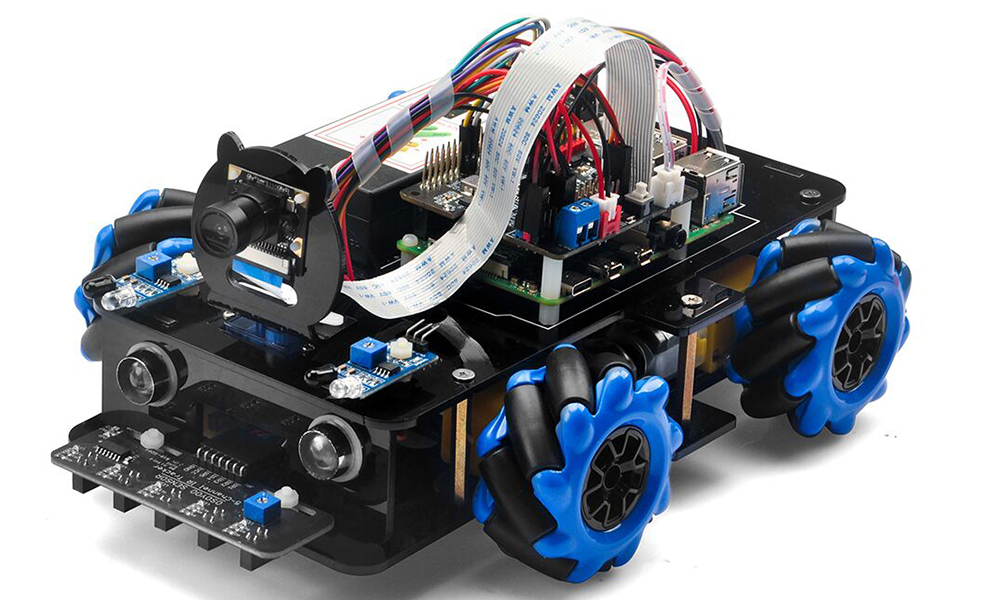
En esta lección le mostraremos cómo usar Python3 Flask y el software Camera Stream para controlar un coche robot Raspberry Pi a través de Internet. Supervisará el movimiento en tiempo real del coche a través de su “ojo” (cámara frontal).

Componentes:
Chasis de coche robótico con ruedas Mecanum OSOYOO x1
Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 / ruedas derechas x2)
Placa Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Placa controladora OSOYOO Model Y x1
Voltímetro OSOYOO x1
Cámara CSI con cable OSOYOO x1
Soporte de cámara OSOYOO x1
Portapilas OSOYOO x1
Cable jumper hembra-hembra de 3 pines OSOYOO x1
Cables jumper hembra-hembra de 6 pines OSOYOO x2
Cable XH2.54 hembra-hembra de 2 pines OSOYOO x1
Pilas 18650 (3,7 V) x2
Cargador de pilas x1

Paso 1: Completar la estructura básica de la Lección 1. El servomotor debe estar instalado y conectado al puerto PWM 15 (omitir si ya está instalado).
Paso 2: Elegir la horquilla ranurada en el servomotor, pasar el soporte de cámara de arriba a abajo y fijar la lámina con tornillos autorroscantes M1.5*6.

Paso 3: Montar la cámara CSI en el soporte con 4 remaches de presión M2.
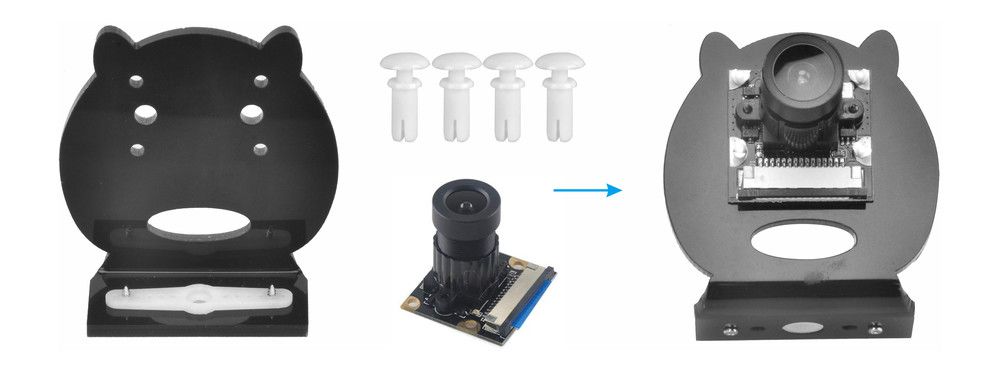
Paso 4: Conectar el cable plano CSI a la cámara CSI.
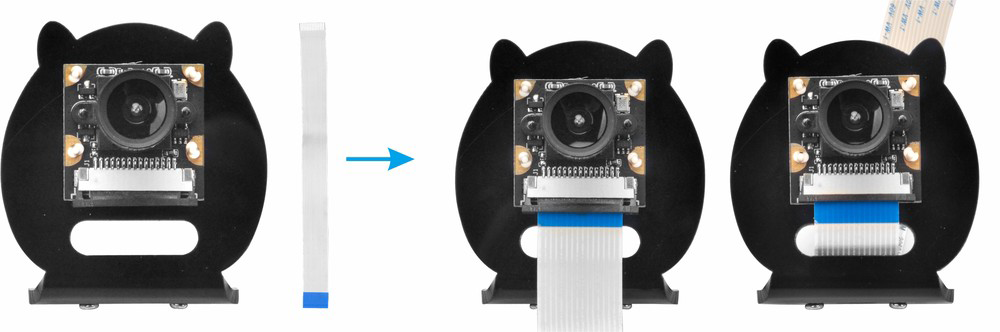
Paso 5: Instalar el soporte de cámara en el servomotor con tornillo autorroscante M2*4.
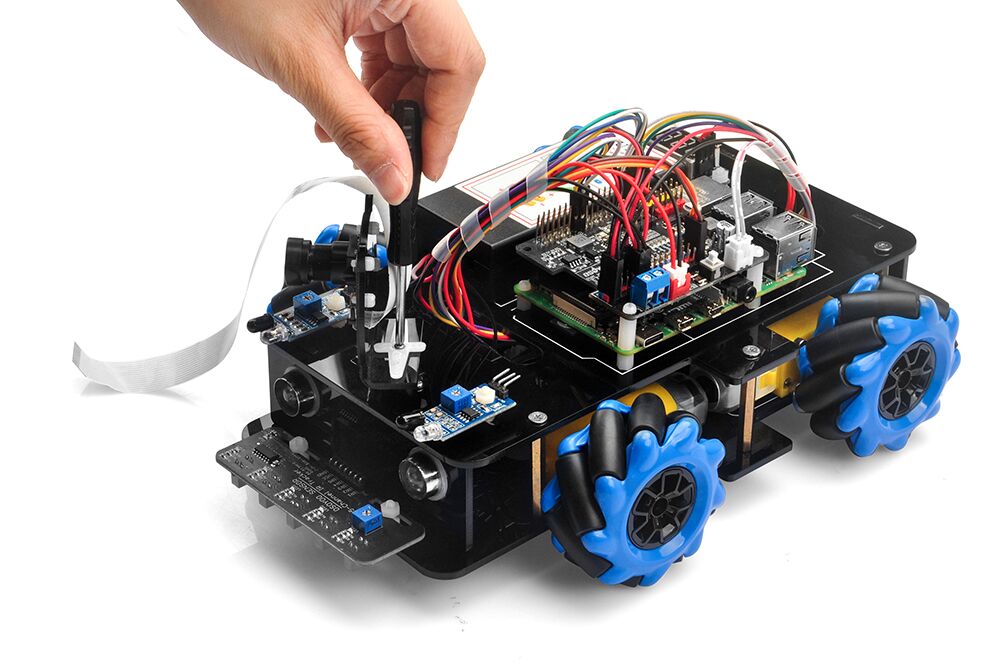
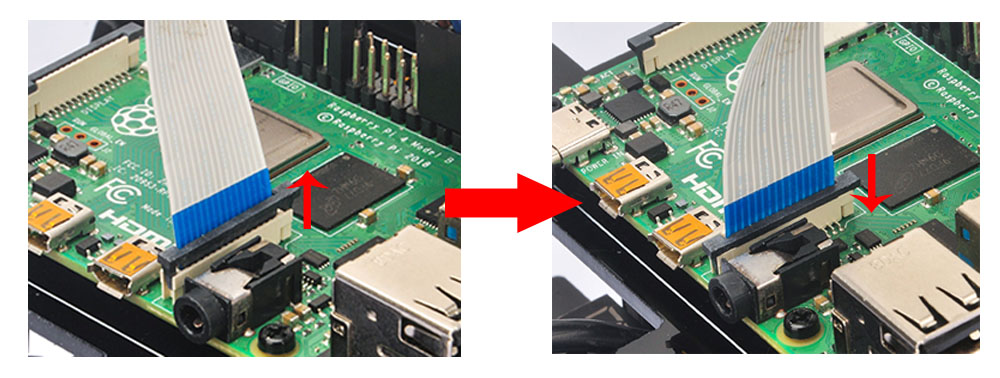
Paso 6: Conectar la cámara CSI a la ranura CSI del Raspberry Pi con el cable plano CSI (prestar atención a la orientación del cable antes de instalarlo).
Paso 7: Instalar el shield OSOYOO PWM HAT en la placa Raspberry Pi.
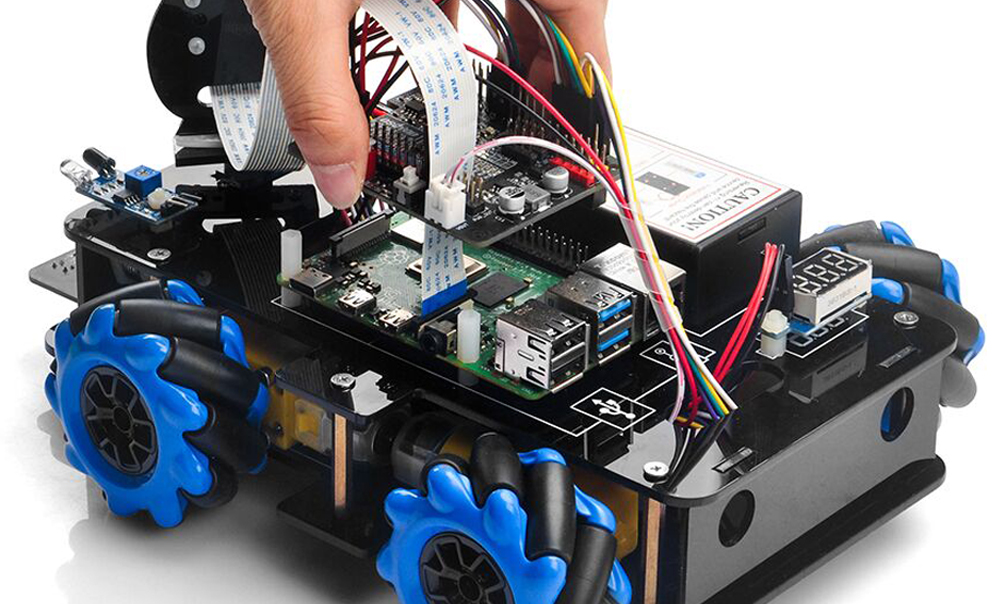

Asegurarse de tener instaladas las bibliotecas rpi.gpio y adafruit-pca9685 y haber habilitado I2C en la Lección 1, luego encender el coche robot.
Configuración de Camera Stream:
Paso 1: Habilitar cámara en Raspberry Pi (Nota: con el sistema BOOKWORM no es necesario):
sudo raspi-config
Seleccionar → Opciones de Interfaz → Cámara → No → Ok → Finalizar (reiniciar Raspberry Pi según indicación).
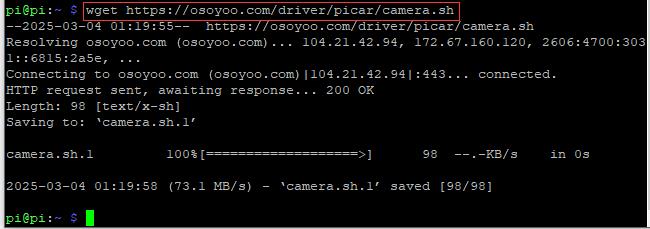
Paso 2: Descargar software Osoyoo Camera Stream:
wget https://osoyoo.com/driver/picar/camera.sh
 Paso 3: Instalar software (instalación única):
Paso 3: Instalar software (instalación única):
bash camera.sh
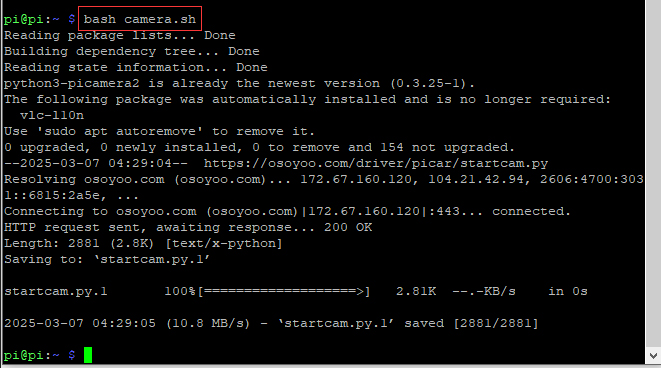
Tras ejecución, el software está instalado. ¡Muy sencillo!
NOTA: ¡El software Camera Stream se instala UNA SOLA VEZ! Para usarlo en el futuro, seguir el Paso 4 y ejecutar python startcam.py.
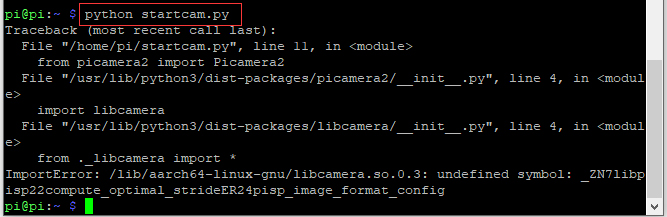
Paso 4: Iniciar servidor de cámara con:
python startcam.py
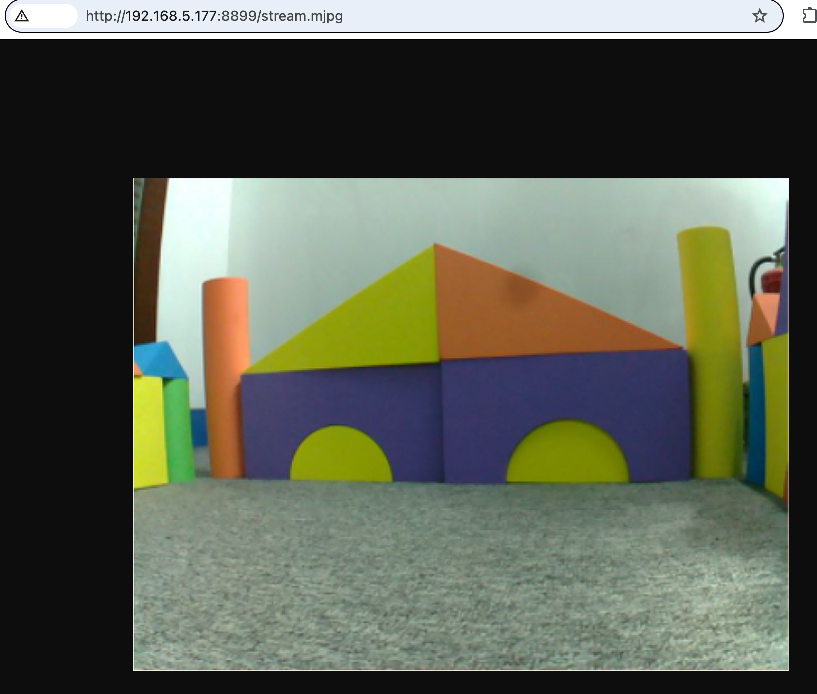
Paso 5: Probar video de vigilancia en el navegador visitando http://dirección_ip_raspberry_pi:8899/stream.mjpg (ej. http://192.168.68.227:8899/stream.mjpg).
Método 1: Control mediante Navegador
Paso 1: Abrir nueva ventana de terminal y descargar software:
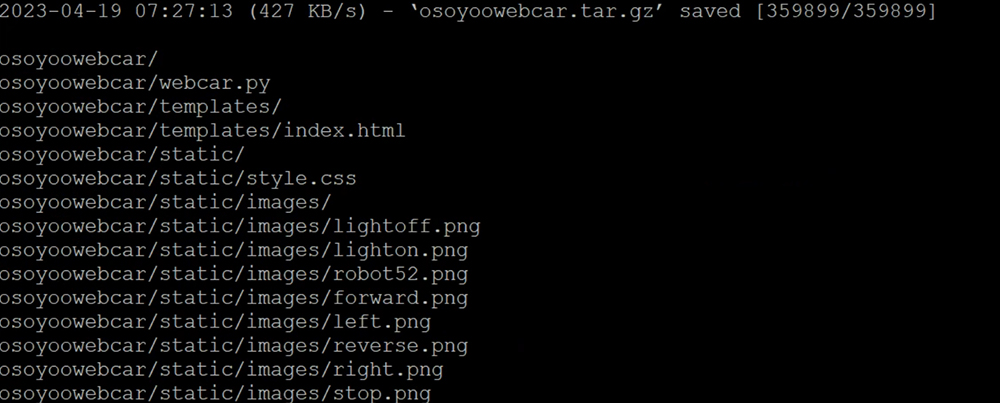
wget https://osoyoo.com/driver/mecanum/osoyoowebcar.sh -O osoyoowebcar.sh
Paso 2: Ejecutar:
bash osoyoowebcar.sh
Se creará automáticamente la carpeta osoyoowebcar.
Paso 3: Acceder a la carpeta:
cd osoyoowebcar

Paso 4: Editar archivo:
nano templates/index.html
Paso 5: Reemplazar dirección IP en línea 34 por la del Raspberry Pi, guardar y salir (Ctrl+X, Y, Enter).
Paso 6: Colocar coche en el suelo y ejecutar:
sudo python ~/osoyoowebcar/webcar.py
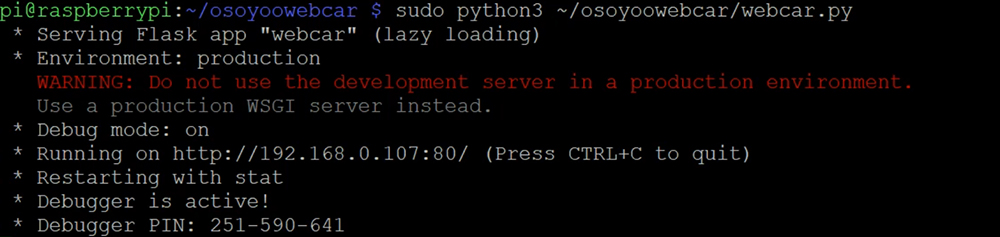
Paso 7: Desde PC o teléfono en la misma red Wi-Fi, visitar http://dirección_ip_raspberry_pi en el navegador. Flechas controlan dirección, círculo rojo central detiene el coche. Cuatro botones de velocidad abajo:
0 (muy lento), — (lento), == (normal), ++ (rápido).
Un deslizador arriba permite orientar la cámara.
Método 2: Control por APP
Paso 1: Descargar código para control por APP:
wget https://osoyoo.com/driver/mecanum/udpmecan5.py -O udpmecan5.py
Paso 2: Ejecutar código (elegir comando adecuado para placa Pi):
python udpmecan5.py
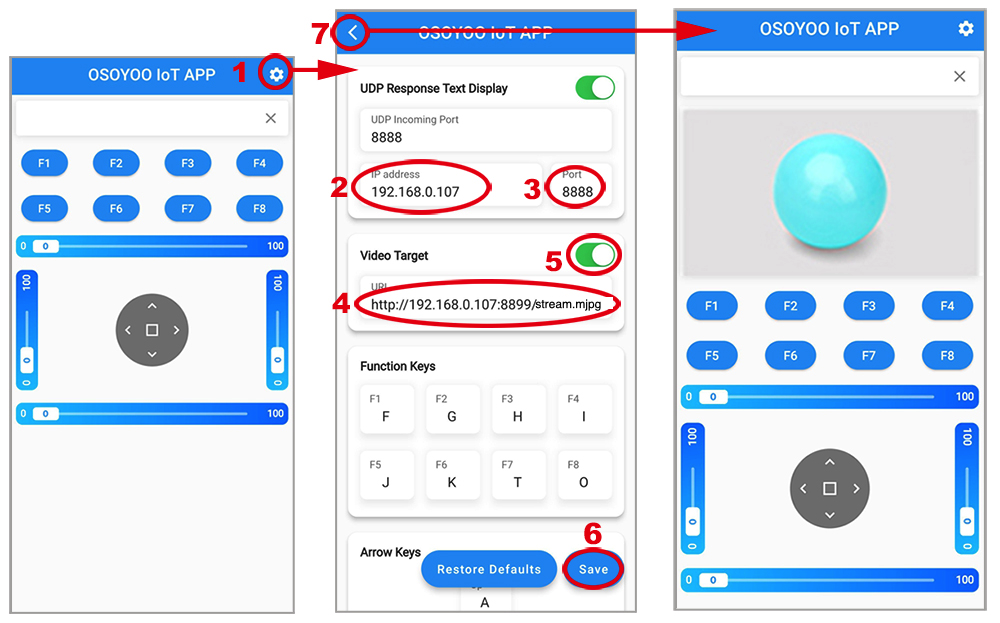
Paso 4: Conectar teléfono a la misma red Wi-Fi que Raspberry Pi. Abrir APP, clicar icono configuración (1), ingresar dirección IP de Raspberry Pi, Puerto 8888, y en “Video Target” poner http://dirección_ip_raspberry_pi:8899/stream.mjpg. Activar interruptor “Video Target”, guardar y volver a interfaz de control.
Paso 5: Colocar coche en el suelo. Usar teclas direccionales ◄ ► ▲ ▼ y deslizador superior para mover coche. Tecla [] detiene movimiento. El deslizador sobre las teclas gira el coche: izquierda para girar a izquierda, derecha para girar a derecha.
▲ avanza, ▼ retrocede. ◄ desplazamiento lateral izquierdo, ► desplazamiento lateral derecho.