| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

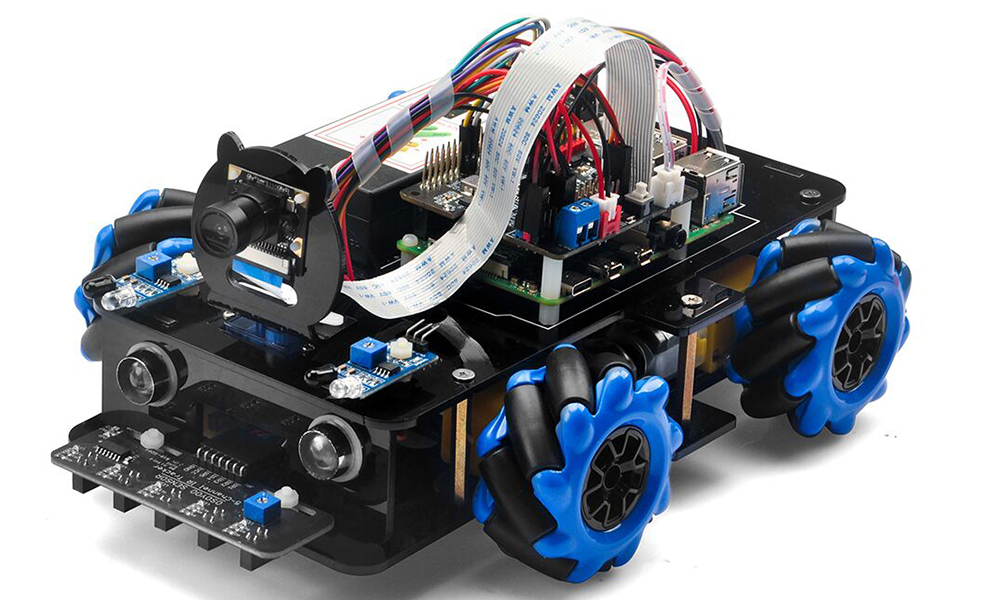
In dieser Lektion zeigen wir Ihnen, wie Sie mit Python3 Flask und Camera Stream Software ein Raspberry Pi Roboterauto über das Internet steuern können. Sie werden die Echtzeitbewegungen des Autos durch sein “Auge” (Frontkamera) überwachen.

Komponenten:
OSOYOO Mecanum-Rad Roboterauto-Chassis x1
OSOYOO Räder und Motoren x4 (Linksräder x2 / Rechtsräder x2)
Raspberry Pi 4B-Platine
OSOYOO PWM HAT Shield x1
OSOYOO Model Y Treiberplatine x1
OSOYOO Spannungsmesser x1
OSOYOO CSI-Kamera mit Kabel x1
OSOYOO Kamerahalter x1
OSOYOO Batteriebox x1
OSOYOO 3-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO 6-polige Jumperkabel (weiblich-weiblich) x2
OSOYOO XH2.54 2-poliges Kabel (weiblich-weiblich) x1
18650-Batterien (3,7 V) x2
Batterieladegerät x1

Schritt 1: Grundgerüst aus Lektion 1 vervollständigen. Servo muss installiert und an PWM-Port 15 angeschlossen sein (überspringen, falls bereits installiert).
Schritt 2: Nutzlager im Servomotor wählen, Kamerahalter von oben nach unten durchführen und die Halterung mit M1,5*6 Selbstschneidschrauben befestigen.

Schritt 3: CSI-Kamera mit 4 M2-Drucknieten am Kamerahalter montieren.
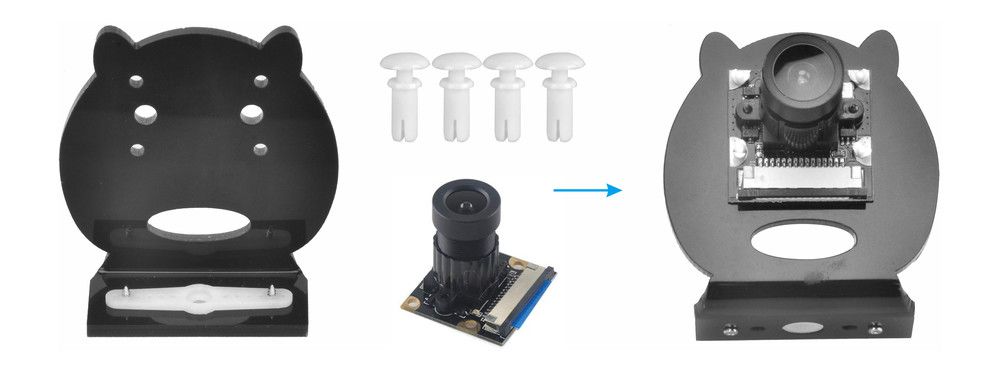
Schritt 4: CSI-Flachbandkabel an die CSI-Kamera anschließen.
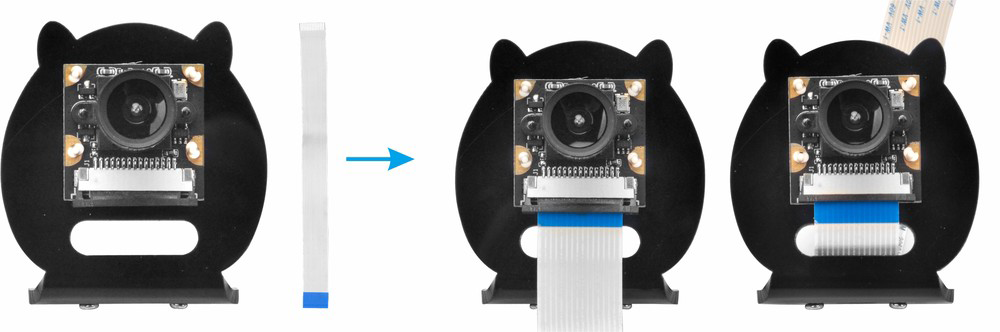
Schritt 5: Kamerahalter mit M2*4 Selbstschneidschraube am Servomotor befestigen.
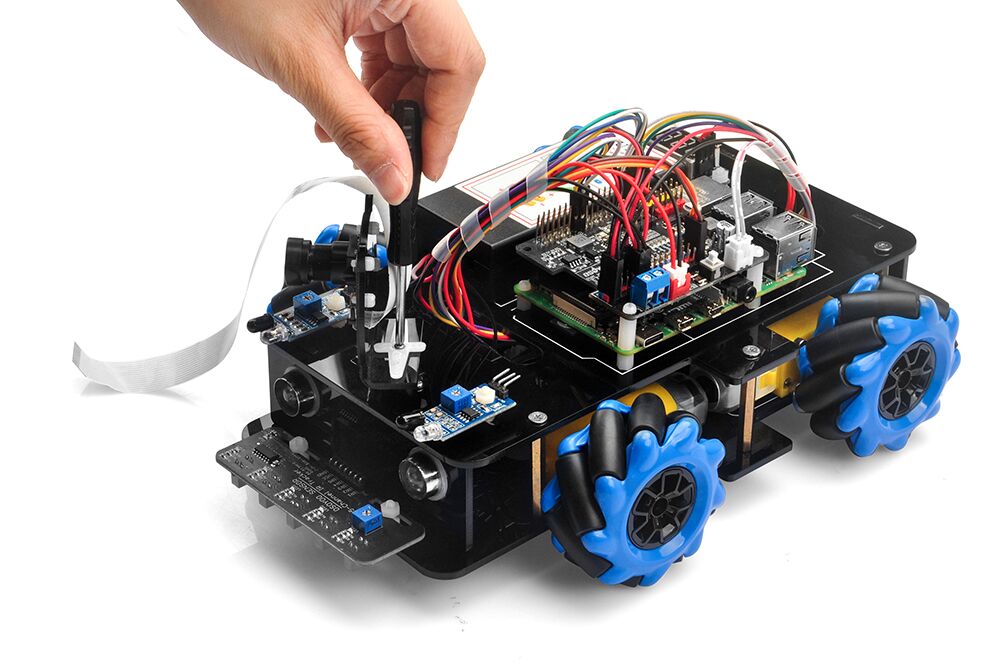
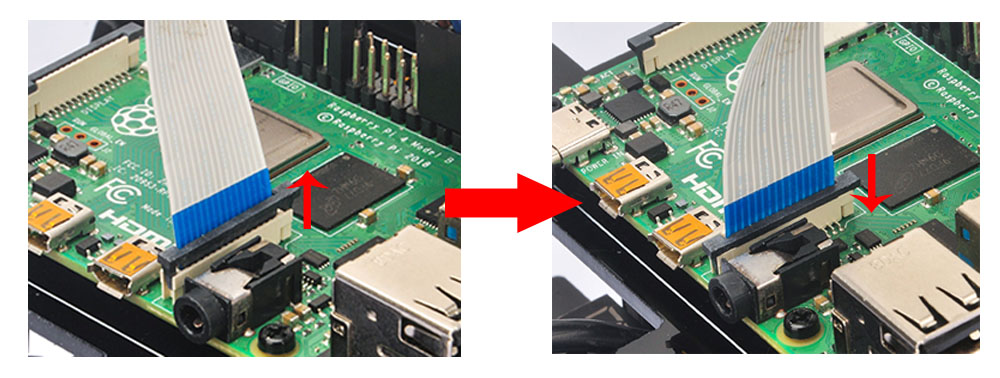
Schritt 6: CSI-Kamera mit dem CSI-Flachbandkabel an den CSI-Slot des Raspberry Pi anschließen (vor der Installation auf korrekte Ausrichtung des Kabels achten).
Schritt 7: OSOYOO PWM HAT auf Raspberry Pi-Platine installieren.
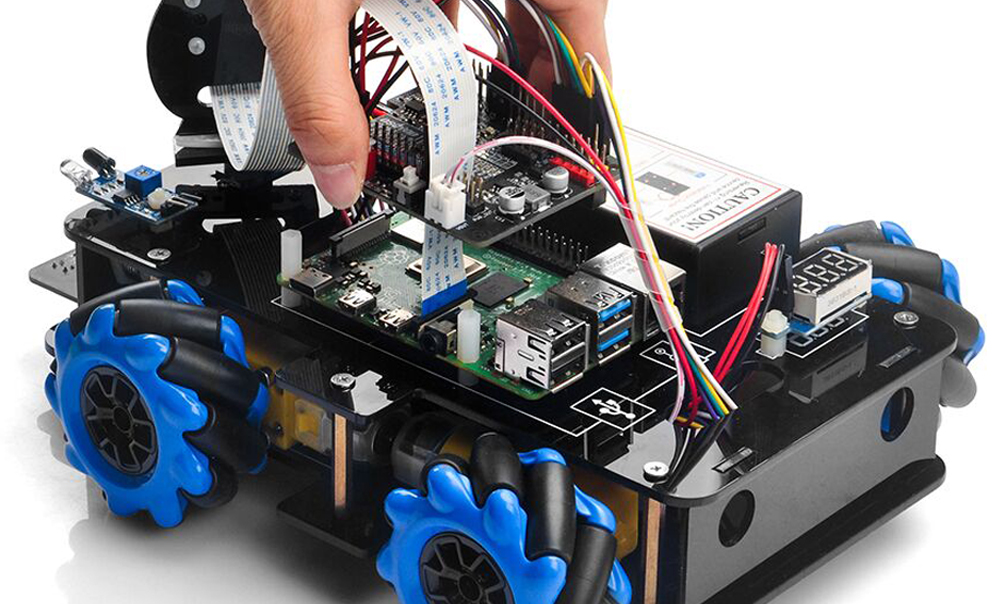

Sicherstellen, dass rpi.gpio, adafruit-pca9685 Bibliotheken installiert und I2C in Lektion 1 aktiviert wurde, dann Roboterauto einschalten.
Camera Stream Einrichtung:
Schritt 1: Kamera auf Raspberry Pi aktivieren (Hinweis: Bei BOOKWORM OS nicht nötig):
sudo raspi-config
Auswählen → Schnittstellenoptionen → Kamera → Nein → Ok → Fertigstellen (Raspberry Pi gemäß Hinweis neu starten).
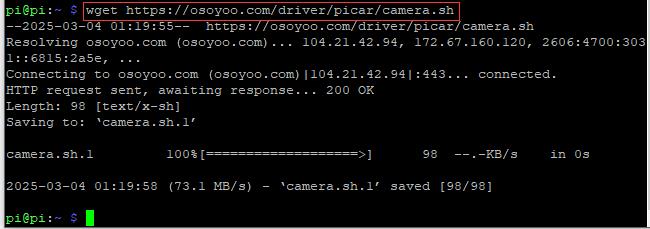
Schritt 2: Osoyoo Camera Stream Software herunterladen:
wget https://osoyoo.com/driver/picar/camera.sh
 Schritt 3: Software installieren (Einmalige Installation):
Schritt 3: Software installieren (Einmalige Installation):
bash camera.sh
Nach Ausführung ist die Software installiert. Einfach!
HINWEIS: Camera Stream Software muss NUR EINMAL installiert werden! Für zukünftige Nutzung folgen Sie Schritt 4 und führen python startcam.py aus.
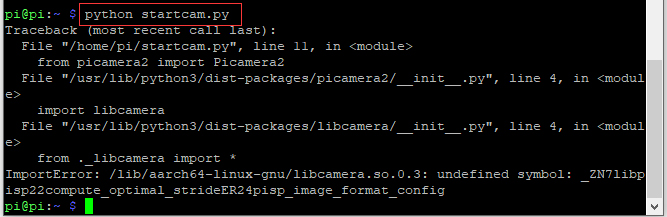
Schritt 4: Server starten mit:
python startcam.py
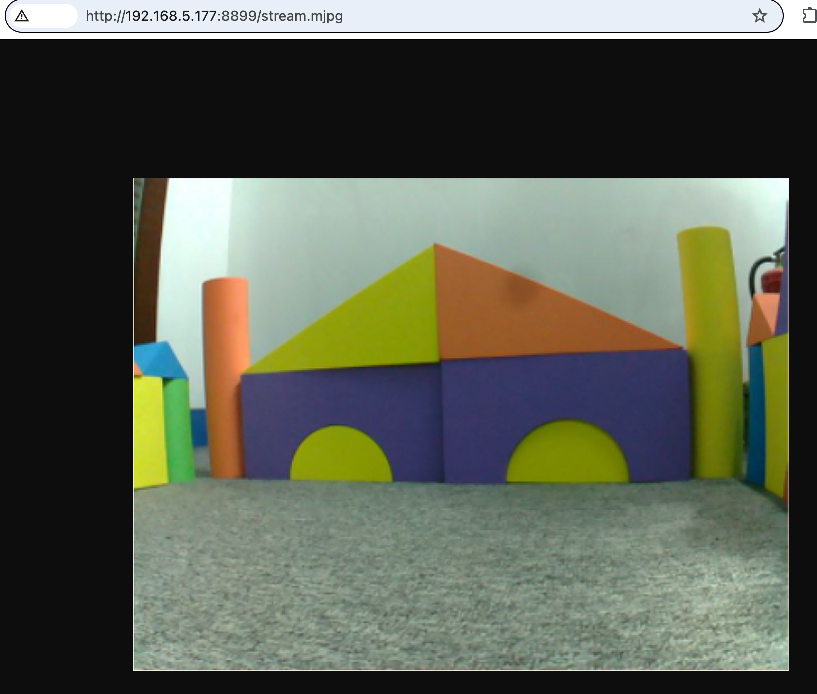
Schritt 5: Überwachungsvideo im Browser testen unter http://ihre_raspberry_pi_ip:8899/stream.mjpg (z.B. http://192.168.68.227:8899/stream.mjpg).
Methode 1: Steuerung über Browser
Schritt 1: Neue Terminalfenster öffnen und Software herunterladen:
wget https://osoyoo.com/driver/mecanum/osoyoowebcar.sh -O osoyoowebcar.sh
Schritt 2: Ausführen:
bash osoyoowebcar.sh
Ordner osoyoowebcar wird automatisch erstellt.
Schritt 3: In Ordner wechseln:
cd osoyoowebcar

Schritt 4: Datei bearbeiten:
nano templates/index.html
Schritt 5: IP-Adresse in Zeile 34 durch die des Raspberry Pi ersetzen, dann speichern und verlassen (Strg+X, Y, Eingabe).
Schritt 6: Auto auf Boden stellen und ausführen:
sudo python ~/osoyoowebcar/webcar.py
Schritt 7: Von PC oder Handy im selben Wi-Fi Netz Browser öffnen und http://ihre_raspberry_pi_ip besuchen. Pfeiltasten steuern Richtung, roter Kreis in der Mitte stoppt. Vier Geschwindigkeitstasten unten: 0 (langsamste), — (langsam), == (normal), ++ (schnellste). Oben ein Slider zum Schwenken der Kamera.
Methode 2: Steuerung per APP
Schritt 1: Beispielcode für APP-Steuerung herunterladen:
wget https://osoyoo.com/driver/mecanum/udpmecan5.py -O udpmecan5.py
Schritt 2: Code ausführen (auf korrekten Befehl für Pi-Platine achten):
python udpmecan5.py
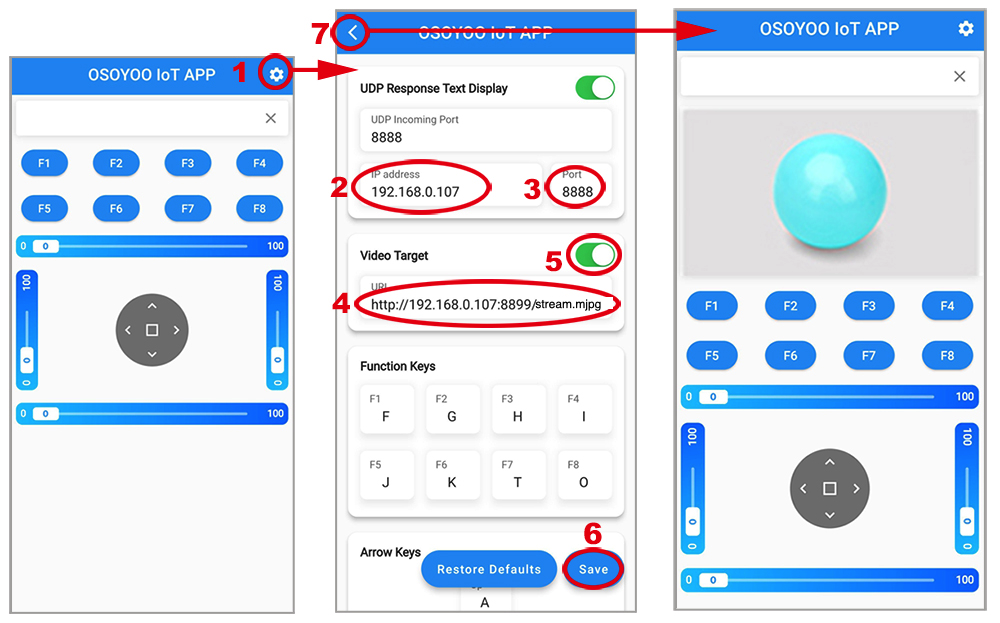
Schritt 4: Handy mit demselben Wi-Fi wie Raspberry Pi verbinden. APP öffnen, Einstellungssymbol (1) anklicken, Raspberry Pi IP-Adresse und Port 8888 eingeben, unter “Video Target” http://ihre_raspberry_pi_ip:8899/stream.mjpg eintragen, Video Target auf grün schalten, speichern und zurück zur Steueroberfläche.
Schritt 5: Auto auf Boden stellen. Mit Richtungstasten ◄ ► ▲ ▼ und oberem Slider bewegen. []-Taste stoppt Bewegung. Der Slider über den Richtungstasten dreht das Auto: links für Linkskurve, rechts für Rechtskurve. ▲ vorwärts, ▼ rückwärts. ◄ seitlich links, ► seitlich rechts.